Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
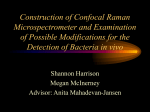
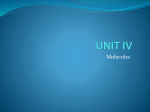
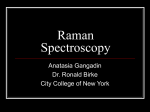
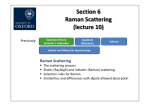
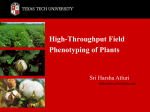
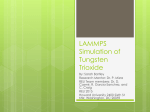
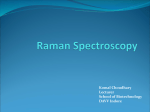
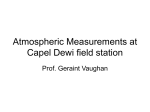
Combined temperature lidar for measurements in the troposphere, stratosphere, and mesosphere Andreas Behrendt, Takuji Nakamura, and Toshitaka Tsuda We describe the performance of a combined Raman lidar. The temperature is measured with the rotational Raman technique and with the integration technique simultaneously. Additionally measured parameters are particle extinction and backscatter coefficients and water vapor mixing ratio. In a previous stage of the system, instrumental problems restricted the performance. We describe how we rebuilt the instrument and overcame these restrictions. As a result, the measurement time for the same spatial resolution and accuracy of the rotational Raman temperature measurements is reduced by a factor of ⬃4.3, and their range could be extended for the first time to the upper stratosphere. © 2004 Optical Society of America OCIS codes: 010.1110, 010.3640, 280.3640, 010.7030, 290.5860. 1. Introduction Integration technique lidar systems1 evaluate and validate middle-atmospheric temperature measurements from satellites and are core instruments in the network for the detection of stratospheric change. To ensure the quality of the measured data, sources of possible errors have been investigated in detail.2,3 The integration technique uses the assumption that the observed atmospheric column is in hydrostatic equilibrium and that the detected backscatter signal is due to molecular scattering only. The latter point restricts the measurement range to heights above the stratospheric aerosol layer if an elastic-backscatter signal is used. By extraction of a molecular backscatter signal from the lidar return, e.g., the vibrational Raman signal of N2, the measurement range of the integration technique can be extended further downward to the lower stratosphere at the cost of a lower signal intensity.4 – 6 However, this augmentation works only when the particle extinction of the signals is negligible compared with the molecular ex- When this research was performed, all the authors were with the Radio Science Center for Space and Atmosphere, Kyoto University, 611-0011 Uji, Kyoto, Japan. A Behrendt 共[email protected]兲 is now with the Institut für Physik und Meteorologie, Universität Hohenheim, Garbenstrasse 30, D-70599 Stuttgart, Germany. Received 25 April 2003; revised manuscript received 24 October 2003; accepted 9 February 2004. 0003-6935兾04兾142930-10$15.00兾0 © 2004 Optical Society of America 2930 APPLIED OPTICS 兾 Vol. 43, No. 14 兾 10 May 2004 tinction. This prerequisite is not always fulfilled in the lower stratosphere. In contrast with the integration technique, the rotational Raman technique allows for temperature measurements without assumptions on the state of the atmosphere and the measurements are insensitive to the presence of particles to a much higher degree.7 Several instrumental realizations of rotational Raman temperature lidar have to be made that yielded step-by-step higher resolution, increased range, and兾or higher reliability of the data also inside particle-loaded height regions.8 –15 Simultaneous measurements with the rotational Raman technique and integration technique have been performed previously with night-long integration.16,17 Because of the higher intensities of the rotational Raman signals of the lidar described here and the extraction of signals with more pronounced temperature sensitivity, the data of the two techniques can be compared with the Raman lidar of the Radio Science Center for Space and Atmosphere 共RASC, Kyoto, Japan兲 with much higher resolution than before, for example, hourly in the upper stratosphere, which is highly beneficial for the study of atmospheric waves. The RASC lidar is located at the middle and upper 共MU兲 radar observatory 共34.8 °N, 136.1 °E兲 in Shigaraki, Japan. The MU radar is operated at 46.5 MHz with 50-kW average transmission power and is used as a mesosphere–stratosphere–troposphere radar and an incoherent scatter radar.18,19 With this instrument, atmospheric dynamics can be studied between 2- and 500-km altitude, however, there is an observational gap between 25 and 60 km at which the radar signals Fig. 1. Setup of the RASC lidar: BD, beam dump; PD, photodiode; BSM, beam-steering mirror. The laser output is synchronized to a chopper blade that protects the high-altitude channel PMT used for the integration technique temperature measurements from the intense lower-altitude signal. are extremely weak. To fill this gap, a Rayleigh lidar was set up at the MU observatory in 2000. In 2001, we redesigned the system and implemented rotational Raman channels for the measurement of temperature profiles in the troposphere and stratosphere. Additional measurement parameters of the instrument were particle extinction coefficient, particle backscatter coefficient, and water vapor mixing ratio measured with the Raman lidar technique. A detailed description of the system in the previous stage provides information on its performance.15 Here we describe how we rebuilt this instrument and how we overcame instrumental problems. The performance of the new instrument is illustrated with measurement examples. First, we implemented new narrowband interference filters with higher peak transmittance compared with the previously used filters. Second, the parameters of these filters were chosen in such a way that they extract rotational Raman signals with higher temperature sensitivity than before. Third, new data acquisition electronics now store the detected lidar signals in both the photon-counting mode and the analog mode simultaneously. Before, nonlinear effects hindered the full-power acquisition of the rotational Raman signals from altitudes below ⬃10 km, and we therefore had to implement 25% neutral-density filters in front of the rotational Raman signal detectors to take measurements at this height region. Now we acquire the unattenuated signals throughout the whole free troposphere, i.e., starting at approximately 1.6-km height above the system at which point the laser beam fully enters the field of view of the receiving telescope. A third major change was the separation of the elastic signals from low and high altitudes. In addition to the improved resolution and range of the rotational Raman temperature measurements, it is shown that measurements in thin clouds are possible with the present setup without the need to correct for elastic-signal intrusion. 2. System Setup A schematic overview of the RASC lidar is shown in Fig. 1. Table 1 lists the technical data of the system. As a transmitter we used an injection-seeded frequency-doubled Nd:YAG laser that emits light at a wavelength of 532.25 nm 共in vacuum兲 with ⬃600-mJ pulse energy at a repetition frequency of 50 Hz. The primary mirror of the Cassegrainian receiving telescope has a diameter of 0.82 m and the secondary telescope mirror has a diameter of 0.25 m, which gives a free telescope area of ⬃0.48 m2. The data acquisition system 共Licel GbR, Berlin, Germany兲 allows for simultaneous detection of the signals in the analog mode and in the photon-counting mode. This feature improves the dynamic range of the signal acquisition 共see Section 3兲. A chopper protects the high-altitude elastic channel from the intense lowaltitude signals. The chopper blade rotates with 100 Hz and has two openings. The beam is focused on the outer edge of the openings 共at a distance of approximately 5 cm to the center兲. The control unit of the chopper gives a trigger signal of 200 Hz, which is frequency divided by 4 and adequately delayed for synchronization of the flash lamps and Q switch of the laser. The concept of the RASC lidar to extract the rotational Raman signals follows the design that was developed for the Raman lidar of GKSS Research Center, Geesthacht, Germany.14 Characteristic of this design is a sequential mount of the elastic channel and the two rotational Raman channels that results in high receiver throughput and high suppression of the elastic-backscatter signal in the rotational Raman channels 共⬎7 orders of magnitude兲. The tilted mounting of the filters allows one to tune the filter passbands by changing the angles of incidence 共AOIs兲 of the light on these filters. For the first measurements of the RASC lidar, we used the narrowband filters 共BS3–BS5, Fig. 2兲 of the GKSS 10 May 2004 兾 Vol. 43, No. 14 兾 APPLIED OPTICS 2931 Table 1. Technical Data of the RASC Lidar with the Recent Upgrades Laser Type Model Wavelength Pulse energy Pulse repetition rate Beam divergence Transmitter optics Geometry Expansion factor Beam divergence of the expanded laser beam Receiver optics Geometry Primary mirror diameter Telescope focal length Field of view Dispersion system 共further details see Table 2兲 Type Channels Chopper Model Detectors Type Models Data acquisition system Model Analog mode Photon-counting mode Minimum 共typical兲 height resolution Height range Raman lidar. These components were now exchanged for new components with improved performance. The transmission versus wavelength of BS3 to BS5 is shown in Fig. 3. When the filters were exchanged, the injection seeder of our laser was also replaced. After the replacement we found that the laser output wavelength 0 changed from 532.11 to 532.25 nm 共in vacuum兲. In Fig. 3 the transmission curves of the GKSS filters are plotted with the same shift of ⫹0.14 nm to show the filter transmissions relative to 0. The optical properties of the components employed for the signal separation after the upgrade are given in Table 2. The manufacturer of the filters, Barr Associates, Westford, Massachusetts, achieved nearly double the peak transmission of the combination of BS4a and BS4b 共from 0.38 to 0.72兲 for the new components and also improved the peak transmission of BS5 共from 0.75 to 0.87兲. The transmission of BS3 is almost the same as before with 0.83 and 0.82, respectively. When the center wave2932 APPLIED OPTICS 兾 Vol. 43, No. 14 兾 10 May 2004 Frequency-doubled Nd:YAG, injection seeded Continuum Powerlite 9050 532.25 nm 共in vacuum兲 ⬃600 mJ 50 Hz ⬍ 500 rad 共full angle兲 Galilean telescope 8 ⬍ 60 rad 共full angle兲 Cassegrainian telescope 820 mm 8000 mm 1.5 mrad 共for the measurements shown here, selectable兲 Filter polychromator 1. Elastic backscatter, low altitude 2. H2O vibrational Raman, 1. Stokes 3. Elastic backscatter, high altitude 4. Lower quantum number pure rotational Raman, anti-Stokes 5. Higher quantum number pure rotational Raman, anti-Stokes 6. Na D2 resonance 共for a collocated Na resonance lidar, removed for the measurements shown here兲 HMS-Elektronik 220 with head 220A and blade 220兾02B Photomultipliers in analog and single photon-counting mode simultaneously Hamamatsu Photonics R943-02, water cooled 共channel 2兲 Electron tubes 9863兾350 共channel 3兲 Electron tubes 9893兾350 共channels 1, 4, and 5兲 Licel Optical Transient Recorder TR16–160 12 bit, 16.66 MHz 250 MHz 9 m 共72 m兲 147.5 km lengths 共CWLs兲 of the GKSS filters were chosen, we focused on high performance of the lidar in the condensation temperature regimes of polar stratospheric clouds 共⬃190 K兲.20 Our aim was to take measurements throughout the troposphere and the stratosphere with the RASC lidar. Therefore we performed new model calculations for the statistical temperature uncertainty of rotational Raman temperature measurements at ⬃240 K. We calculated the rotational Raman spectrum of dry air 共78.1% N2 and 20.9% O2; the contribution of H2O is negligible even for water vapor saturation兲 for 0 ⫽ 532.25 nm. The formula for the intensities and positions of the rotational Raman lines can be found in Ref. 21. Assuming Poisson statistics, the 1- uncertainty of the measured number of photon counts N is given by ⌬N ⫽ 冑N , (1) Fig. 3. Transmission versus wavelength for beam splitters BS3, BS4a⫹BS4b, and BS5 used to extract the elastic signal and rotational Raman signals NRR1 and NRR2, respectively. The laser wavelength 0 of 532.25 nm is marked. The transmission data of the filters owned by GKSS Research Center, Geesthacht, Germany, which we used until October 2001, are shown for comparison 共with CWLs increased by 0.14 nm; see text兲. Fig. 2. Setup of the RASC lidar polychromator: L1–L9, lenses; IFa and IFb, interference filters; BS1–BS5, beam splitters; ND, neutral-density filters; M, mirror; PMT1–PMT5, photomultiplier tubes for the signals indicated. The Na resonance channel with BSx, IFx, Lx, and PMTx belongs to a collocated lidar; BSx was removed for the measurements shown here. which, for the uncertainty of the rotational Raman temperature measurements, yields ⌬T ⫽ ⫽ 冉 1 T 1 ⫹ Q Q N RR1 N RR2 冉 冊 1兾2 N RR2 1 N RR1 1 ⫺ T N RR1 T N RR2 冊冉 ⫺1 1 1 ⫹ N RR1 N RR2 冊 1兾2 , (2) where Q⫽ N RR2 N RR1 (3) is the ratio of the number of photon counts NRR1 and NRR2 of lower and higher rotational quantum number transition channels. Q is the measurement parameter that yields the atmospheric temperature profile after calibration of the system. Figure 4 shows the temperature dependence of NRR1, NRR2, and Q calcu- lated for the parameters of the RASC lidar. We approximated the differential ratio in Eq. 共2兲 with T T2 ⫺ T1 ⬇ . Q Q共T 2兲 ⫺ Q共T 1兲 (4) The transmission curves of the interference filters used are very steep (Fig. 3). Therefore we decided to use a peak transmission of ⫽ 1 and an out-of-band transmission of ⫽ 0 for this simulation. The results for T1 ⫽ 235 K and T2 ⫽ 240 K 共Fig. 5兲 lead to a change of the CWL of the second rotational Raman channel, which is now 528.76 nm instead of 529.34 nm. The change of the CWL of the first rotational Raman channel 共531.14 nm instead of 530.84 nm兲 was possible because of the improved out-of-band blocking of BS4a and BS4b, which allows one to place the passbands of these components closer to the laser line. With this setting the RASC lidar extracts rotational Raman signals for the given FWHM of the filters at 240 K, which are closer to the optimum. In the present setting, ⌬TRASC ⫽ 1.14 ⫻ ⌬Toptimum, where ⌬TRASC is the measurement uncertainty for the RASC lidar for measurements at 240 K and ⌬Toptimum is the lowest measurement uncertainty possible with the given filter bandwidths at the same temperature. ⌬Toptimum is found for 240 K at CWLRR1 ⫽ 531.66 nm and CWLRR2 ⫽ 528.66 nm. The optimum CWL can be chosen only for the RR2 channel and not for the RR1 channel. With CWLRR1 Table 2. Optical Properties of the Filter Polychromatora Wavelength 共nm兲 660 532.25 531.1 528.5 a Parameter BS1 BS2 BS3 BS4a ⫹ BS4b Combined BS5 AOI (deg) CWL (nm) FWHM (nm) 45 45 4.8 532.34 0.80 5.0 531.14 0.65 7.2 528.76 1.10 ⬇ 0.9 ⬇ 0.9 ⬇ 0.05 ⬇ 0.9 ⬇ 0.9 ⬎ 0.95 ⬇ 0.85 ⬇ 0.85 ⬇ 0.85 ⫽ 0.82 ⫽ 0.11 ⬎ 0.95 ⬎ 0.96 ⬍ 10⫺6 ⬍ 10⫺6 ⫽ 0.72 ⬎ 0.96 ⬍ 2 䡠 10⫺4 ⫽ 0.87 IFa ⫹ IFb Combined 3.5 & 0 660.65 1.2 ⫽ 0.48 ⬍ 10⫺8 , transmission; , reflectivity. Transmission values ⬍ 10⫺3 are estimates from the manufacturers . 10 May 2004 兾 Vol. 43, No. 14 兾 APPLIED OPTICS 2933 Fig. 4. 共a兲 Calculated intensity of the two pure rotational Raman signals NRR1 and NRR2 versus temperature T for the new interference filters. 共b兲 Signal ratio Q, which serves for the temperature measurement of the atmosphere, and weighted sum Nref, which is used as the Raman reference signal. 共c兲 Relative change of Nref with temperature. Vertical lines mark the range of atmospheric temperatures of the measurement example shown in Fig. 6. ⫽ 531.66 nm, the blocking of the elastic backscatter signal would be too low. The ratio of statistical measurement uncertainties of the present setting by use of the new filters and the previous setting, for which the GKSS filters were used, is ⌬TRASC兾⌬TGKSS ⫽ 1.14兾1.46 ⫽ 0.78 共Fig. 5兲. According to the first measurements of thin clouds 共see below兲, the present filter settings can be kept and corrections of the RR1 Fig. 5. Dependence of the statistical measurement uncertainty ⌬T 共relative units兲 on the CWL of both rotational Raman channels for a temperature of 240 K. For the calculation, the filter transmission curves were approximated by rectangular filter passbands with widths of 0.6 and 1.2 nm for the first and second rotational Raman channels, respectively. The calculated step width was 0.025 nm. Values are given relative to the minimum error near CWLRR1 ⫽ 531.7 nm and CWLRR2 ⫽ 528.7 nm 共䊐兲. The CWLs of the GKSS filters and the RASC filters are marked G and R, respectively. 2934 APPLIED OPTICS 兾 Vol. 43, No. 14 兾 10 May 2004 signal discussed before15 are no longer necessary with the new filters. Another change to the previous setup was made for the water vapor Raman channel, which was employed to measure the water vapor mixing ratio with the Raman technique.22,23 We exchanged the broadband color filter, IFa, for a narrowband interference filter with 1.2 nm FWHM to improve suppression of both the elastic signal cross talk to the water vapor signals and the background noise. We also adjusted the passband of filter IFa by selecting the AOI. With a 3.5° AOI the CWL becomes 660.65 nm and the temperature dependence of the extracted water vapor Raman signal becomes negligible.24 The tilted mount of this and other narrowband components 共BS3–BS5兲 provides the possibility to adjust the CWL 共deviation between the specified and the actual filter CWL and future changes of the laser wavelength兲. We obtained a Raman reference signal, which is proportional to the molecular density of the atmosphere and which is essentially temperature independent, with the rotational Raman signals by way of Nref 共z兲 ⫽ NRR1 共z兲 ⫹ c NRR2 共z兲, where Nref, NRR1, and NRR2 are the intensity of the reference signal and the rotational Raman signals, respectively; c is a constant; and z denotes height. We determined c by calculating the temperature dependence of the rotational Raman signals taking the spectral characteristics of the receiver into account. We found the ratio of rotational Raman signal efficiencies experimentally by comparing the theoretical and experimental calibration functions for temperature measurements. With this method we derived a rotational Raman reference signal for measurement of the backscatter and extinction coefficients25 with a very small temperature dependence: With the new interference filters the intensity of the reference signal varies by less than ⫾0.5% for temperatures between 200 and 300 K 关Fig. 4共c兲兴. For cases when these variations are not negligible compared with the statistical uncertainty of the data, a further correction of the reference signal can be made by fitting the curve in Fig. 4共c兲 and eliminating even this small dependence with the measured temperature profile. With the interference filters used before, c was 0.1 共15兲 whereas with the new filters c is 0.6. The increase is due to both the higher transmission of the RR1 filters 共0.72 instead of 0.38兲 and to the change of the filter CWLs and thus the temperature dependence of the signals. As the elastic signal from low altitudes is blocked with the chopper at PMT 3, it is detected in a separate branch of the receiver with PMT 1. A glass plate 共BS1兲 reflects a small fraction of the total signal intensity for this channel, which is further weakened by neutral-density filters. In the previous stage of the RASC lidar, the total polychromator throughput of the receiver was ⬃30, 70, 33, and 64% for the water vapor Raman channel, the elastic channel, and the two rotational Raman channels, respectively 共for operation without BSx, a beam splitter was used for the collocated sodium li- dar, which has ⬃90% transmission兲.15 With the changes described in this paper, the same parameters 共excluding the effect of BS1, the beam splitter added for the low-altitude elastic channel, which also has ⬃90% transmission兲 became 46, 70, 58, and 68%, respectively. Thus, with the new filters, the efficiency of the signal separation was significantly improved by 76% for the first rotational Raman channel and by 53% for the water vapor Raman channel. 3. Measurement Examples Typical nighttime measurements taken with the new instrument are shown in Fig. 6. A total of 72 data files with a 1-min integration time and a height resolution of 72 m were summed for these plots. The analog data were scaled to fit the photon-counting rates. After correcting the photon-counting signals for dead-time effects26 and subtracting the background, the photon-counting and analog signals are nearly parallel up to count rates of ⬃200 MHz. The maximum count rate to which the analog detection signals are equivalent is ⬃2 GHz. To determine the dead time of each channel, the photon-counting signals were corrected with different values for the dead time and compared with the analog data. Minimum differences yielded dead-time values of 4.0 ns for the first and second rotational Raman channels and 5.3 ns for the low- and high-altitude elastic channels, respectively. With these values, differences between the two detection modes are less than ⫾1% for the rotational Raman channels down to a 2-km height above sea level 共the lidar altitude is 385 m兲, less than ⫾5% for the elastic low-altitude signal down to 7 km, and less than ⫾5% for the elastic highaltitude channel down to 3 km. With the data acquisition electronics used before, the dead times of the receiver were significantly higher 共⬃12 ns兲.15 In Fig. 6 the lidar rotational Raman temperature data and the measurements of a nearby radiosonde are in close agreement in the troposphere. The tropopause is located near 16.5-km height in both profiles. In the stratosphere, larger differences between the measured temperatures are probably caused by the larger amplitudes of wave disturbances that increase with height. The statistical uncertainty of the rotational Raman temperature data is below ⫾1 K up to 17.7-km 共21.9-km兲 height for a height resolution ⌬z of 72 m 共360 m兲 and below ⫾2 K up to 27.8 km for ⌬z ⫽ 1080 m. Nonlinearities of the photon-counting data, which were not successfully compensated by the dead-time correction by use of the model of a paralyzable detector, can be seen below 3-km height. Temperature values calculated with the analog rotational Raman data are closer to the radiosonde data than rotational Raman temperature data of the photon-counting data. Analog rotational Raman data and radiosonde data agree well down to ⬃2-km height, i.e., ⬃1.6 km above the lidar. For lower altitudes, different overlap functions between the laser beam and the field of view of the telescope cause deviations. To obtain rotational Raman temperature data down to these altitudes, we chose a Fig. 6. Temperature measured with the RASC Raman lidar on 9 and 10 August 2002, 23.15– 00.27 Japan standard time 共JST兲. Rotational Raman temperature values were derived with analog 共dashed curves兲 and photon-counting signals 共solid curves兲. Lidar data with a height resolution of 72 m were used up to 15-km height; the data between 15 and 20 km, 20 and 30 km, and above 30 km were smoothed with sliding average lengths of 360, 1080, and 2952 m, respectively. Error bars in the top and bottom left panels and the curves in the bottom right panel show the 1- statistical uncertainty of the rotational Raman temperature measurements by use of the photon-counting signals. The crosses in the right panel depict the top height of each averaging length. The CIRA-86 profile for 35 °N and the month of August and data of a radiosonde launched in Yonago 共35.4 °N, 133.4 °E兲 at 21.00 JST are shown for comparison. field stop diameter of 12 mm for these measurements, resulting in a receiver field of view of 1.5 mrad 共full angle兲. A coaxial setting of the outgoing laser beam and the receiving telescope, instead of the biaxial design that we use, would allow measurements closer to the ground. On the other hand, however, a coaxial design would cause an unwanted increase of the low-range signal intensity also in the high-altitude elastic channel. The flash-lamp power and Q switch of the laser are synchronized by the chopper to control the transmit10 May 2004 兾 Vol. 43, No. 14 兾 APPLIED OPTICS 2935 ted and detected signals. Variations of the chopper frequency or tropospheric clouds or aerosols sometimes lead to signal-induced noise 共SIN兲 and deviations of a few kelvins of the measurements in the upper mesosphere. To correct for such effects, the signal received from altitudes between 100 and 147.5 km are fitted with exp共a⬘ z2 ⫹ b⬘ z ⫹ c⬘兲, where a⬘, b⬘, c⬘ are fitting coefficients and z is the height. This background noise profile is subtracted from the data. To avoid SIN, either the chopper laser synchronization could be changed so that signals from above 30 km are also weakened 共which would also render integration technique measurements at these heights impossible and therefore make comparisons between the two temperature measurement techniques difficult兲 or neutral-density filters could be used 共which would decrease the range of the integration technique data兲. At present, we investigate whether additional gating of PMT3 prevents SIN effects when the height range of the elastic high-altitude channel is kept constant. The algorithm to derive the temperature data with an integration technique was initialized at 85-km height by use of the zonal average temperature of the Committee on Space Research (COSPAR) International Reference Atmosphere (CIRA-86) for 35 °N and the month of August.27 The lidar data and the CIRA model are within typical climatological variations and planetary wave activity. The stratopause is located at ⬃47-km height in both profiles. The lidar profile shows clearly a wave structure with a mesospheric inversion layer 共which could be caused by gravity wave breaking兲 at approximately 75-km height, where the temperature data measured with the lidar are up to 16 K above the climatological mean. Lidar temperature data derived with the rotational Raman technique and those of the integration technique coincide at approximately 30-km height. Below 28.5-km height, the influence of the chopper is seen in the integration temperature data. Between 33- and 40-km height, the data of the two lidar techniques show larger differences but still agree within the 1- statistical uncertainty of the data. During the measurement shown in Fig. 6, a cirrus layer was present above the lidar. The peak backscatter ratio of this cloud layer is ⬃7 at 13.2-km height 共for 72-min averaging and 72-m height resolution兲. The particle backscatter signal of the cloud does not affect the accuracy of the lidar temperature measurement. The total extinction of the cloud is relatively low; the signals are attenuated by ⬃7%. The relation among integration time tres, height resolution zres, and the 1- statistical uncertainty ⌬T of the rotational Raman temperature measurements is shown in Fig. 7. For this plot the pure background-subtracted rotational Raman signals were employed. Thus the data of Fig. 7 show the ideal performance of nighttime measurements 共without contamination of the Sun, the Moon, or electric light兲. With, e.g., 5-min integration time and a height resolution of 72 m, ⌬T is ⬍1 K up to 2936 APPLIED OPTICS 兾 Vol. 43, No. 14 兾 10 May 2004 Fig. 7. Relation among integration time, height resolution, and 1- statistical uncertainty of the temperature measurements with the rotational Raman technique for the upgraded RASC lidar 共calculated with the background-corrected data of 9 and 10 August 2002, 23.15– 00.27 JST兲. ⬃7-km altitude. For measurements in the stratosphere, an integration time of 1 h results in 1 K uncertainty for 1080 m averaging at 23-km altitude, whereas for 41-km altitude and 2952-m resolution 1-h integration time yields 5 K uncertainty if the background signals are negligible. The relations shown in Fig. 7 can be scaled for other resolutions with the approximation that ⌬T is proportional to 共tres zres兲⫺0.5. Before the upgrades tres ⫽ 9 min and zres ⫽ 500 m yielded ⌬T ⬍ 1 K up to z ⫽ 11 km 共Ref. 15兲; after the upgrades tres was 2.1 min for the same combination of zres, ⌬T, and z, which is a factor of 共4.3兲⫺1 smaller than before. Equivalently, ⌬T has been improved by a factor of 共4.3兲⫺0.5 ⫽ 0.48 when tres, zres, and z are kept constant. With the increase of the signal intensity by a factor of 4 共because we removed the 25% neutral-density filters兲, the improved setting of the filters that gives a reduction of ⌬T by a factor of 0.78 at T ⫽ 240 K 共see Section 2兲 and the higher filter transmissions we would expect an even greater improvement from the upgrades if measurements were done with exactly the same instrumental alignment and optical thickness of the atmosphere. It is noteworthy that for low-range measurements ⌬T is smaller than 1 K up to z ⫽ 3 km for tres ⫽ 1 min and zres ⫽ 72 m 共Fig. 7兲. This shows that observations of the atmospheric boundary layer structure with scanning or airborne rotational Raman lidar are already feasible with the product of laser power 共30 W兲 and the receiving telescope area 共⬃0.48 m2兲 of the RASC lidar. Furthermore, if instead of 532 nm, for example, the third harmonic radiation of Nd:YAG at 355 nm was employed as the primary wavelength, a further increase of the rotational Raman signal intensity by a factor of approximately 共3兾2兲4 ⫽ ⬃5 Fig. 8. Consecutive temperature profiles measured with the rotational Raman technique 共left兲 and their statistical uncertainty ⌬T 共right兲. The time and height resolution of the raw data is 1 min and 72 m, respectively; for this plot, the photon-counting data were used and smoothed with a sliding average window of 7 min and 360 m. The average of the same data is shown in Fig. 6. would be gained compared with the system described here provided that the efficiency of the receiver is the same.21 A good compromise between resolution and accuracy for measurements throughout the troposphere with the new RASC lidar would be an integration time of 7 min and a gliding average of 360 m. With this resolution the new system provides rotational Raman temperature data with a 1- statistical uncertainty ⬍1 K up to an altitude of 16 km 共Fig. 8兲, which is also the approximate height of the summer tropopause above the lidar site. With the upgrades we have described, the rotational Raman temperature measurements also became feasible inside clouds as can be seen in Fig. 9. Here a cloud with a mean backscatter ratio of 46.9 ⫾ 0.1 at 7.9-km height above sea level was present for 30 min above the lidar 共height resolution of the lidar data is 360 m, altitude of the lidar is 385 m above sea level兲. Rotational Raman temperature data and the measurement of a local radiosonde show differences of 共⫺1.4 ⫾ 0.3兲 K at 7.9-km height. In the previous stage of the RASC lidar, a cloud with a backscatter ratio of 26 yielded deviations of ⫺5 K.15 Whether the deviations between the lidar and the radiosonde are due to the temporal and spatial differences of the sampled air masses, multiple-scattering effects, or leakage of the elastic signal in the rotational Raman channels remains to be clarified by more measurements. If there are deviations that result from elastic-signal leakage, either the AOIs of the rotational Raman channel filters can be increased yielding smaller CWLs and thus higher blocking at 0 共Ref. 14兲 or the rotational Raman signals can be corrected for the elastically backscattered fraction.15 Figure 9 also shows the other measured parame- Fig. 9. Measurements in the presence of a high-altitude cloud layer 共25 September 2002, 21.00 –21.30 JST, i.e., 90,000 laser shots兲: 共a兲 temperature with the rotational Raman technique, 共b兲 statistical uncertainty of the temperature measurement, 共c兲 backscatter ratio, 共d兲 particle backscatter coefficient par, 共c兲 particle extinction coefficient ␣par, 共f 兲 water vapor mixing ratio. Measurement data of a radiosonde started at the lidar site 共reaching altitudes of 6.5 and 18.5 km at 21.00 and 21.30 JST, respectively兲, the molecular backscatter coefficient mol and the molecular extinction coefficient ␣mol are shown for comparison 共enlarged by a factor of 10兲. 10 May 2004 兾 Vol. 43, No. 14 兾 APPLIED OPTICS 2937 Table 3. Main Properties of the Receiving Channels of the RASC Lidar Property CWL 共nm兲 FWHM 共nm兲 Polychromator transmission 共entrance hole to PMTa兲 Total blocking at 532.25 nm PMTa efficiency for detected signal Elastic, Low Altitude H2O Raman Elastic, High Altitude Rotational Raman 1 Rotational Raman 2 ⬇ 10⫺3 660.65 1.2 0.41 532.34 0.8 0.63 531.14 0.65 0.52 528.76 1.10 0.61 0.13 ⬇ 109 0.13 0.13 ⬇ 107 0.13 ⬇ 107 0.13 a PMT, photomultiplier tube. ters of the RASC lidar. At 7.9-km height the particle backscatter coefficient is 共0.03216 ⫾ 0.00006兲 km⫺1 sr⫺1, the particle extinction coefficient is 共0.431 ⫾ 0.007兲 km⫺1, the lidar ratio is 13.4 ⫾ 0.3, and the water vapor mixing ratio is 共0.83 ⫾ 0.03 g kg⫺1兲. 4. Summary We have presented the new combined Raman lidar of RASC and have illustrated the performance of the system with measurement examples. We have shown that a combined Raman lidar that emits at one laser wavelength and has five detection channels allows for simultaneous measurements of the atmospheric temperature profile from the bottom of the free troposphere to the top of the mesosphere 共from ⬃1.6 to ⬃80 km above the system兲, the particle extinction coefficient; the particle backscatter coefficient, and the water vapor mixing ratio, as well as combined parameters such as relative humidity and the extinction-to-backscatter ratio. With the RASC lidar, comparisons between the temperature data of the rotational Raman technique and the integration technique are possible on an hourly basis in the stratosphere, an altitude range for which only a few other instruments provide temperature data. Also, inside a cloud with a backscatter ratio of ⬃47, the rotational Raman lidar temperature data and the data of a local radiosonde show only small deviations. Without clouds, the 1- statistical uncertainty of the rotational Raman temperature measurements is below 1 K at nighttime, e.g., up to ⬃7-km altitude for 5-min integration time and a height resolution of 72 m. For measurements in the stratosphere, e.g., an integration time of 1 h results in 1 K uncertainty for a 1080 m average at 23-km altitude, whereas for 41-km altitude and 2952-m smoothing 1 h of integration time yields 5 K uncertainty if background contamination of the rotational Raman signals is negligible. In conclusion, resolution, range, and reliability of the rotational Raman technique could be improved simultaneously. The performance of the low-altitude temperature measurements also illustrates the potential to employ the rotational Raman technique with scanning or with airborne lidar systems. A. Behrendt is grateful to the Japanese Society for the Promotion of Science for the award of a fellowship 共00765兲 and a research grant 共12440127兲 that made 2938 APPLIED OPTICS 兾 Vol. 43, No. 14 兾 10 May 2004 this research possible. This study was partially supported by Monbusho grant in aid 14340140. References 1. A. Hauchecorne and M. L. Chanin, “Density and temperature profiles obtained with lidar between 30 and 70 km,” Geophys. Res. Lett. 7, 565–568 共1981兲. 2. P. Keckhut, A. Hauchecorne, and M. L. Chanin, “A critical review of the database acquired for the long-term surveillance of the middle atmosphere by the French Rayleigh lidars,” J. Atmos. Oceanic Technol. 10, 850 – 867 共1993兲. 3. T. Leblanc, I. S. McDermid, A. Hauchecorne, and P. Keckhut, “Evaluation and optimization of lidar temperature analysis algorithms using simulated data,” J. Geophys. Res. 103, D6, 6177– 6187 共1998兲. 4. R. G. Strauch, V. E. Derr, and R. E. Cupp, “Atmospheric temperature measurements using Raman backscatter,” Appl. Opt. 10, 2665–2669 共1971兲. 5. W. P. G. Moskowitz, G. Davidson, D. Sipler, C. R. Philbrick, and P. Dao, “Raman augmentation for Rayleigh lidar,” in Proceedings of the 14th International Laser Radar Conference. 共Istitute di Ricerca sulle Onde Elettromagnetiche, Comitato Nayionale per le Scienge, Florence, Italy, 1988兲. 6. P. Keckhut, M. L. Chanin, and A. Hauchecorne, “Stratospheric temperature measurement using Raman lidar,” Appl. Opt. 29, 5182–5185 共1990兲. 7. J. Cooney, “Measurement of atmospheric temperature profiles by Raman backscatter,” J. Appl. Meteorol. 11, 108 –112 共1972兲. 8. J. Cooney and M. Pina, “Laser radar measurements of atmospheric temperature profiles by use of Raman rotational backscatter,” Appl. Opt. 15, 602– 603 共1976兲. 9. R. Gill, K. Geller, J. Farina, and J. Cooney, “Measurement of atmospheric temperature profiles using Raman lidar,” J. Appl. Meteorol. 18, 225–227 共1979兲. 10. Y. F. Arshinov, S. M. Bobrovnikov, V. E. Zuev, and V. M. Mitev, “Atmospheric temperature measurements using a pure rotational Raman lidar,” Appl. Opt. 22, 2984 –2990 共1983兲. 11. D. Nedeljkovic, A. Hauchecorne, and M. L. Chanin, “Rotational Raman lidar to measure the atmospheric temperature from the ground to 30 km,” IEEE Trans. Geosci. Remote Sens. 31, 90 –101 共1993兲. 12. G. Vaughan, D. P. Wareing, S. J. Pepler, L. Thomas, and V. Mitev, “Atmospheric temperature measurements made by rotational Raman scattering,” Appl. Opt. 32, 2758 –2764 共1993兲. 13. C. R. Philbrick “Raman lidar measurements of atmospheric properties,” in Atmospheric Propagation and Remote Sensing III, W. A. Flood and W. B. Miller, eds., Proc. SPIE 2222, 922–931 共1994兲. 14. A. Behrendt and J. Reichardt, “Atmospheric temperature profiling in the presence of clouds with a pure rotational Raman lidar by use of an interference-filter-based polychromator,” Appl. Opt. 39, 1372–1378 共2000兲. 15. A. Behrendt, T. Nakamura, M. Onishi, R. Baumgart, and T. 16. 17. 18. 19. 20. Tsuda, “Combined Raman lidar for the measurement of atmospheric temperature, water vapor, particle extinction coefficient, and particle backscatter coefficient,” Appl. Opt. 41, 7657–7666 共2002兲. A. Hauchecorne, M. L. Chanin, P. Keckhut, and D. Nedeljkovic, “LIDAR monitoring of the temperature in the middle and lower atmosphere,” Appl. Phys. B 55, 29 –34 共1992兲. U. von Zahn, G. von Cossart, J. Fiedler, K. H. Fricke, G. Nelke, G. Baumgarten, D. Rees, A. Hauchecome, and K. Adolfsen, “The ALOMAR Rayeligh兾Mie兾Raman lidar: objectives, configuration, and performance,” Ann. Geophys. 18, 815– 833 共2000兲. S. Fukao, T. Sato, T. Tsuda, S. Kato, K. Wakasugi, and T. Makihira, “The MU radar with an active phased array system. 1. Antenna and power amplifiers,” Radio Sci. 20, 1155–1168 共1985兲. S. Fukao, T. Tsuda, T. Kato, S. Sato, K. Wakasugi, and T. Makihira, “The MU radar with an active phased array system. 2. In-house equipment,” Radio Sci. 20, 1169 –1176 共1985兲. A. Behrendt and C. Weitkamp, “Optimizing the spectral parameters of a lidar receiver for rotational Raman temperature measurements,” in Advances in Laser Remote Sensing: Selected Papers Presented at the 20th International Laser Radar 21. 22. 23. 24. 25. 26. 27. Conference, A. Dabas, C. Loth, and J. Pelon, eds. 共Edition de l’Ecole Polytechnique, Palaiseau, France, 2001兲, pp. 113–116. A. Behrendt and T. Nakamura, “Calculation of the calibration constant of polarization lidar and its dependency on atmospheric temperature,” Opt. Express, 10, 805– 817 共2002兲, http:兾兾www.opticsexpress.org. S. H. Melfi, J. D. Lawrence, and M. P. McCormick, “Observation of Raman scattering by water vapor in the atmosphere,” Appl. Phys. Lett. 15, 295–297 共1969兲. J. Cooney, “Remote measurement of atmospheric water vapor profiles using the Raman component of laser backscatter,” J. Appl. Meteorol. 9, 182–184 共1970兲. V. Sherlock, A. Hauchecorne, and J. Lenoble, “Methodology for the independent calibration of Raman backscatter watervapor lidar systems,” Appl. Opt. 38, 5816 –5837 共1999兲. A. Ansmann, U. Wandinger, M. Riebesell, C. Weitkamp, and W. Michaelis, “Independent measurement of extinction and backscatter profiles in cirrus clouds using a combined Raman elastic-backscatter lidar,” Appl. Opt. 31, 7113–7131 共1992兲. D. R. Evans, The Atomic Nucleus 共McGraw-Hill, New York, 1955兲, p. 786. D. Rees, J. J. Barnett, and K. Labitzke, eds., CIRA 1986, Part II: Middle Atmosphere Models, Adv. Space Res. 共COSPAR兲 10共12兲 共1990兲. 10 May 2004 兾 Vol. 43, No. 14 兾 APPLIED OPTICS 2939