Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Three-phase electric power wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Buck converter wikipedia , lookup
Electromagnetic compatibility wikipedia , lookup
Power engineering wikipedia , lookup
History of electric power transmission wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power electronics wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Alternating current wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Opto-isolator wikipedia , lookup
Mains electricity wikipedia , lookup
Real Time Digital Simulation
RTDS
®
Power Systems Simulation
in
Real Time
1
2
RTDS Technologies Inc.
Company:
• Based in Winnipeg,
Canada
• Established in 1994
- 40
°
C
RTDS Technologies Inc.
History:
• Manitoba HVDC Research Centre
(1980s)
• Funding from Manitoba Hydro
• World’s 1st real time digital simulator
• 1st commercial installation in 1993
• Created a independent company RTDS Technologies in 1994
3
RTDS Technologies Inc.
RTDS Technologies:
•
•
•
•
over 100 installations
over 400 units
23 countries
clients include leading …
– electrical power utilities
– electrical equipment
manufacturers
– research and learning
institutions
4
RTDS Technologies Inc.
RTDS Simulator Users:
Electrical power utilities
% of Clients per Sector
30.48%
32.38%
% manufacturers
% research
% utility
37.14%
Electrical equipment
manufacturers
% Racks per Sector
Research and learning
institutions
33%
40%
manufacturer
research
utility
27%
5
RTDS Technologies Inc.
Real Time Digital Simulation
•
Electromagnetic transient solution (EMTP type
simulation)
• Based on the Dommel algorithm
• Trapezoidal rule of integration
• New solution produced each timestep
•
•
•
Continuous hard real-time response must be
achieved and sustained if physical control and
protection equipment is to be included in the
simulation study
Dedicated high speed processing and signal
communication required to achieve real-time
The RTDS Simulator
• A combination of specially designed parallel
processing hardware and detailed, efficient
solution algorithms
6
Time scales of power system phenomena
Operator actions
Electromagnetic transient modeling and simulation
LFC
Prime mover control
Protection
Generator control
HVDC, FACTS, etc.
Frequency
variations
Daily load variation
Tie-line regulation
Long term dynamics
Long-duration variations
Transient stability
Short-duration variations
Subsynchronous resonance
Oscillatory transients
Voltage fluctuations
Switching
Impulsive transients
Imbalance, harmonics, inter-harmonics, notching, noise
Lightning
10-7
10-5
Timescale (seconds)
10-3
10-1
1 cycle
101
1 sec
1 min
103
1 hr
105
1 day
Page 7
RTDS Technologies Inc.
Simulation Techniques:
Loadflow & Short Circuit
50/60 Hz only
~0 Hz
Transient Stability
simulation cannot
capture
subsynchronous ~50/60 Hz
phenomena.
Region often neglected by non-real time
electromagnetic transient simulations
(short duration simulations)
Special Models and
Smaller Timesteps
?
Electromagnetic Transients - EMTP/EMTDC/ATP
0 Hz to 2-3 kHz (dt = 50 us)
Real Time Electromagnetic Transients - RTDS
0 Hz to 2-3 kHz (dt = 50 us)
Frequency
Continuous real time simulations
cover the entire frequency range
8
Transients and Steady State
RRL
BRK
BRK
0.1 [H]
0.1 [H]
1.0 [uF]
1.0 [uF]
• Transient solution
– Harmonics
– Non-linear effects
– Frequency
dependent effects
Capbank : Graphs
Vcap
300
200
kV
100
0
-100
-200
-300
RLIa
RLIb
RLIc
2.00
1.50
1.00
kA
0.50
0.00
• Steady state solution
-0.50
-1.00
-1.50
-2.00
0.100
0.150
0.200
0.250
0.300
0.350
0.400
0.450
0.500
...
...
...
– RMS Value
Transients and Steady State
RRL
BRK
BRK
0.1 [H]
0.1 [H]
1.0 [uF]
1.0 [uF]
• Transient
– High frequency
– Damped (short
duration)
Capbank : Graphs
Vcap
300
200
kV
100
0
-100
-200
-300
RLIa
RLIb
RLIc
2.00
1.50
1.00
kA
0.50
0.00
-0.50
-1.00
-1.50
-2.00
0.190
0.200
0.210
0.220
0.230
0.240
0.250
0.260
...
...
...
Transients and Steady State
Transient stability problem
S/H
in out
hold
S2M
Vref0
Vref
Exciter (ST3A)
VT
IT 3
If
Ef0
Ef
Ef0
3
Ef0
Ef If
A
V
S
Te
P = 143.8
Q = 76.1
V = 1.003
•
Fault / clearance
•
Slow Transients (electro-mechanical)
1 unit 80 MVA
OOS Investigation
A
V
#1
#2
1.070
Tm
W
W2
P1
P2
1.060
w Tm
1.050
Tm0
TM01
W2
1.040
1.030
1.020
1.010
1.000
D
-
+
D
F
W2
-
G
1 + sT
+
G
1 + sT
0.980
0.970
F
300
TLine_01
S/H
in out
hold
TM01
0.990
BRK
1.0
*
13.333
250
TLine_02
200
150
S/H
in out
hold
L2N
100
50
S2M
0
Vref0
Vref
-50
BRK
Exciter (ST3A)
VT
Ef0
IT 3
Ef
If
Timed
Fault
Logic
ABC->G
-100
-150
Ia
Neuclear plant : Con...
Ef
P1
Ef0
Q1
1.50
E132
E132
3
Ef0
25.4618
66.1229
Ef If
A
V
1.00
P = 25.46
Q = 66.12
V = 1.004
S
Te
1 unit = 150 MVA
0.50
A
V
Ea
#1
#2
0.00
Tm
w Tm
W
#1
Tm0
TM0
-0.50
#2
P+jQ
TIME
TIME
1.0
D - +
*
13.333
F
W
TM0
D - +
F
S/H
in out
hold
L2N
G
1 + sT
G
1 + sT
-1.00
-1.50
S2M
L2N
x
4.00
4.50
5.00
5.50
6.00
6.50
7.00
7.50
8.00
8.50
9.00
...
...
...
Electromagnetic transients
• Electrical transient occurs when there is a rapid exchange or flow of
energy from one element to another
– Interaction of energy stored in electric fields of
capacitances and magnetic fields of inductances in
electrical power systems
– Initiated by a change to the network topology
(connections)
• Switching Events
– Opening and closing
• Faults
– Inception and clearance
• Lightning
• Others
Electromagnetic transients
#1
T
#2
RRL
#1
#2
TLine1
BRK1
BRK
Ea
Eb
0.001 [H]
3
Open
Main : Graphs
Main : Graphs
Ea
Eb
200
200
100
100
0
0
y
300
y
300
-100
-100
-200
-200
-300
0.170
-300
0.190
0.210
0.230
0.250
0.270
...
0.170
0.190
0.210
0.230
0.250
0.270
...
...
...
...
...
10.0
Basic R-L-C networks
BRK
1
0.005
3
Oscillatory
transients:
RL
1/[2(pi).SQRT(LC)] =1.299 kHz
•
Both L and C involved
•
Damping is due to
resistance
Ic
4.0
3.0
2.0
1.0
0.0
-1.0
•
•
-2.0
-3.0
-4.0
Ec
300
200
100
0
-100
-200
-300
0.1950
0.1975
0.2000
0.2025
0.2050
0.2075
0.2100
0.2125
0.2150
...
...
...
System losses
Loads
Transient vs. Steady State
Load Flow / Transient Stability
• Each solution based on
phasor calculations
R=0
I
V
R
L
Electro-Magnetic
Transients
•
Direct time domain
solution of Differential
Equations
Time Step
• Period of natural frequency is about 1.5 ms
i2
L1
i1
e
R12
v1
R1
R1 100,000
L1 1.0H
R12 0.005
v2
C2
C2 0.05F
Time Step
• Time step of 1.0 ms
2.00
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0
0.01
0.02
Tim e (s)
0.03
0.04
0.05
Time Step
• Time step of 5 micro-seconds
2.00
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0
0.007
0.014
0.021
0.028
Time (s)
0.035
0.042
0.049
Time Step
• Time step of 70 micro-seconds
2.00
1.80
1.60
1.40
1.20
1.00
0.80
0.60
0.40
0.20
0.00
0
0.007
0.014
0.021
0.028
Time (s)
0.035
0.042
0.049
Non Real Time vs. Real Time
Simulation:
Non Real Time:
• Simulation of the system’s response over 1 second may require several
seconds or even minutes of computer time
•
Wide range of available non real-time programs (PSCAD, EMTP, etc.)
•
Solution speed is not hard real-time, hence interpolation can be used in large
closely connected networks with numerous switches
Real Time:
• Simulation of the system’s response over 1 second must be completed in
exactly 1 second.
•
Hard real-time provides equidistant updates from each timestep
20
实时仿真
Real Time Simulation
•
实时:仿真系统中完成一个物理现象的时间与电力系统中完成该现象的
时间完全一样;
•
时间域中的电磁暂态分析;
•
实时仿真应在所仿真的整个系统,而不是在部分的仿真系统进行;
•
实时仿真应能连续地长时间进行;
•
实时仿真装置应能与实际的电力系统元件(例如与控制保护系统)相连
接来完成闭环试验或是能在电力系统中运行;
•
Real Time:The time to complete a physical phenomena should be exactly the
same as it happened in a real power system;
•
It is in time domain, electromagnetic transient analysis;
•
The real time simulation is in full simulated system, not in part of the
simulated system;
•
The real time simulation can operate continuously;
•
The real time simulation can connect to the real power system equipments
(e.g. relay or control system) for a close loop test or can operate in the
21
power system;
动模与数模仿真
Analog and Digital Real Time Simulations
•
两种实时仿真:
– 动模与数模
•
三个时间里程碑:
– 1880年代,1970年代,1989年
•
•
•
•
•
•
•
•
动模在世界上已有百年的历史,在国内至少有50年历史;
实时数字仿真只有19年历史;
目前实时数字仿真的安装地点约为动模的一倍;仿真规模在数十倍以上;
Two Kinds of Real Time Simulation:
• Analog and Digital
Three Milestone Years:
• 1880’
1970’
1989
Analog Real Time Simulation Has 100 year’s History worldwide and more than 50
Year’s History in China
Real Time Digital Simulation Has only 19 year’s History
Digital/Analog: The Location Number: 2, Simulated Scale: Tens Times
22
国外实时数字仿真的里程碑(供讨论)
Milestone of Real Time Simulation (for discussion)
•
美国国家专利2323588, Waldo E. Enns 交流网络仿真装置,申请1940.11.6.批准
1943.7.6;
•
IEEE论文Hermann W. Dommel 教授,1969.4.4.
– 单相和多相网络中电磁暂态的数字仿真
•
世界上第一台实时数字仿真装置诞生: 1989年,Manitoba HVDC研究中心
(RTDS技术公司); Dennis Woodford, Rick Kuffel, Rudi Wiercks, Trevor Maguire,
James Giesbrecht
•
US Patent 2323588, Waldo E. Enns, Applied 1940.11.6,Approval 1943.7.6
– Apparatus for A.C. Network Analysis
•
IEEE Paper April 4, 1969, Hermann W. Dommel
– Digital Computer Simulation of Electromagnetic Transient in Single-and
Multiphase Networks
•
Manitoba HVDC Research Center (RTDS Tchnologies Inc), 1989, Dennis Woodford,
Rick Kuffel, Rudi Wiercks, Trevor Maguire, James Giesbrecht
– The Birth Day of First Power System Real Time Digital Simulator Worldwide
23
经验与教训(一)
What We Learned from the History Review (1)
• 电力工业的发展是实时仿真的主要推动力;
• 科技的进步是实时仿真的基础(电工理论基础,电力系统理论和技术以
及计算机技术);
• 正确的技术路线和市场化;
• 坚持不懈的研究与开发;
• The Real Time Simulation Is Driven by The Development of Electric Power
Industry;
• Science & Technology’s Progresses are the Base of the Real Time Simulation
(Theories & Technologies of Electric and Computer);
• Right Technical Plan/Path and Marketing;
• Continue R&D;
24
经验与教训(二)
What We Learned from the History Review (2)
• 如同任何其它历史(经济,技术,政治等等)实时仿真的历史也有历史
的创造者,推动者和见证者
– -今天每一个人都可以为自己参与了这个实时仿真的技术发展史而自豪
• 回顾历史可以让我们知道自己从何而来,现在何处,以及将要去往何处。
– -实时仿真技术从发展至今尚处成长期,它值得我们为其努力。
• As Other Histories (Economy, Technical etc), Real Time Simulation
Technology Has Its History Creators, Promoters and Witnesses.
– Every Body in This Room Can Proud For His Involving In This History
• Review History Let Us Know Where We Are From, Where We Are and
Where We To Go:
– Real Time Simulation Technologies Are Still Growing. It Is Worth For Us to
Continue Work For It.
25
对未来应用的建议
Suggestions For The Applications in Near Future
• 继续为交直流大电力系统服务仍是一段时期内实时仿真的主要方向;
• 重视实时仿真在再生能源和负荷管理的应用;
• Continue Work for the AC/DC Power Systems
• Put Attention to Renewable Energy and Demand Management
26
27
RTDS
Simulation
Hardware
Simulation Hardware
RTDS Hardware:
• Custom parallel processing
computer
• Hardware is modular, allowing
users to increase computing
capability as required
• Main interface with the
hardware is through userfriendly software
• Ample, convenient input and
output allowing connection of
physical devices
28
Simulation Hardware
A Rack:
A unit of hardware is called a ‘Rack’ and typically includes:
• 1~6 RISC Processor Cards (GPC)
• 1 Inter-Rack Communication Card (IRC)
• 1 Workstation InterFace Card (WIF)
29
Simulation Hardware
Parallel Processing – Sharing the burden of calculation:
> t
30
Simulation Hardware
Small Scale Simulations:
• Reduced # of processors
• Transportable to site
Large Scale RTDS Simulations:
• Large scale studies
• Complex simulation case
• One large or several smaller
simultaneous simulations
31
Simulation Hardware
Modular Hardware:
•
•
•
•
Easy expansion
Maximum availability
Easy maintenance
Full Compatibility
Processing power
GPC
32
Simulation Hardware
Customer Driven Development:
Giga Processor Card - GPC:
• Introduced January 2005
• Additional Power utilizing two IBM 750GX
Power PC’s each running at 1 GHz
• Multiple timestep operation supported
3PC
RPC
GPC
Processor
ADSP 21062
IBM PPC750CXe
IBM PPC750GX
Precision
40-bit
64-bit
64-bit
Processors per card
3
2
2
MFLOPS per processor
80
600
1000
MFLOPS per card
240
1200
2000
( MFLOPS = millions of floating-point operations per second )
33
Simulation Hardware
RISC Processor Card (GPC):
• GPC Network Solution
– 1 GPC processor handles 54 nodes
in a single lumped circuit, as well as
12 embedded valve groups
– presently dimensioned for 56 singlephase switches (i.e. breakers and/or
faults)
No. of cards required to perform
solution of 54 node network
TPC
3PC
GPC
27
6
0.5
34
35
36
Simulation Hardware
Workstation InterFace Card - WIF:
•
Each rack contains a single WIF with
its own unique Ethernet Address
•
Connects to workstation via standard
Ethernet LAN
•
Provides timestep clock
•
Provides communications to load,
start and stop simulation case
•
Enables user interaction with
simulation
•
Provides data exchange
coordination and data record
capability
37
Simulation Hardware
Workstation InterFace Card - WIF:
• 50 MHz MPC860T/DT processor
• 10/100 Base TX Ethernet interface
• 1 million point plot memory
• Bus logic to control local rack simulation
• Global bus for Multi-rack simulation
• RS-232C Diagnostic/Configuration Port
• LED display on the faceplate to show configuration
information
38
Simulation Hardware
Inter-Rack Communication Card - IRC:
• Connection via RJ-45 jack
• Connection paths which mimic the
power system
• No need to change
connections
• High speed communication
between racks
• Direct connection to six other racks
39
Simulation Hardware
Flexible and Expandable I/O for the GPC:
•GTAI (12 channel, isolated 16-bit analogue input card)
•GTAO (12 channel, isolated 16-bit analogue output card)
•GTDI (64 channel, isolated digital input card)
•GTDO (64 channel, isolated digital output card)
•GTFPI (interface to digital and high voltage
interface panels)
•GTNET (Ethernet Interface System)
The GT family of I/O cards can be daisy chain
connected to a single GPC fiber port (fewer GPC
cards needed to accommodate I/O connection).
40
Simulation Hardware
High Precision Analogue Output Card - GTAO:
• Twelve (12) synchronized 16-bit
output signals per card
• Output range +/- 10 volts peak
(0.3 mV resolution)
• Fully compatible for 12 channel update of
small timestep (~ 2μs) simulation signals
• Connects to GPC via fiber optic connection –
daisy chain connection allowed to other GTIO
cards
• Rail mounted with access from rear
of cubicle
• Signal selection and scaling in Draft
41
Simulation Hardware
High Precision Analogue Input Card -GTAI:
•
12 channel input card with 16 bit A-to-D
converters
•
Provides optical isolation of input signals
from external devices to the RTDS
•
Interfaces to GPC via fiber optic connection
•
+/- 10 V true differential analog input
•
Connects to GPC via fiber optic connection –
daisy chain connection allowed to other GTIO
cards
•
Rail mounted with access from rear of cubicle
•
Signal selection and scaling in Draft
42
Simulation Hardware
GPC Digital Input - GTDI:
• Required for digital input to small
timestep simulations
• 64 digital input signals per card
• Connects to GPC via fiber optic
connection – daisy chain connection
allowed to other GTIO cards
• Rail mounted with access from rear of
cubicle
• Signal selection in Draft
43
Simulation Hardware
GPC Digital Output - GTDO:
• Required for digital output to small
timestep simulations
• 64 digital output signals per card
• Connects to GPC via fiber optic
connection – daisy chain connection
allowed to other GTIO cards
• Rail mounted with access from rear of
cubicle
• Signal selection in Draft
44
Simulation Hardware
GPC Front and High Voltage Panel Interface - GTFPI:
• Interface to 16 digital input and
16 digital output low voltage channels
• Interface to 16 dry contacts
• Connects to GPC via fiber optic
connection – daisy chain connection
allowed to other GTIO cards
• Rail mounted with access from rear of cubicle
• Signal selection in Draft
45
开关量输出回路
装置开关输出回路接线图
Simulation Hardware
GPC Network Communication - GTNET:
• GTNET – GSE
IEC 61850 binary messaging
• GTNET – SV
IEC 61850-9-2 sampled values
• GTNET – Playback
very large data playback
• GTNET – DNP
DNP SCADA interface
47
Simulation Hardware
Digital Interface Panel:
• Interconnect signals between the RTDS external equipment
• 16 digital input and 16 digital output via 4mm banana plug adapters
mounted on front of the cubicle
• Signals from the GPC connect to the digital interface panel via the
GTFPI card
48
Simulation Hardware
High Voltage Interface Panel:
• 16 solid state contacts rated for up to 250 Vdc
• Used to send status signals from the RTDS Simulator to external
equipment at station level voltage (max. 250 Vdc)
49
Simulation Hardware
Amplifiers:
• External amplifiers are used to provide secondary level voltages
and currents
• Amplifiers are connected in the test loop between the RTDS
Simulator and the equipment under test
• Various amplifiers solutions have been used (Omicron,
Analogue Associates/Techron/Crown, Doble, etc.)
50
RTDS Technologies Inc.
RTDS
Simulation
Software
51
Simulation Software
RTDS Software:
Graphical User Interface
• RSCAD
Power and Control System
Software
• Component Model Libraries &
Compiler
52
Simulation Software
RSCAD Graphical User Interface:
FILEMAN
TLINE
RUNTIME
DRAFT
CABLE
MULTIPLOT
53
Simulation Software
RSCAD Graphical User Interface
Software:
• JAVA Based
• Runs on PC under Windows and on
Sun Workstation under Unix
• Single line diagram drawing format
• Hierarchy structure for circuit layout
• Integrated Load Flow
• Software can be installed on any
number of customer computers
• PSS/E conversion function
54
Simulation Software
Circuit Construction in RSCAD / DRAFT:
• Circuit assembly
• Data entry
3 phase drawing models
single line drawing mode
55
Simulation Software
Component Editing:
56
Simulation Software
Running the Simulation in RSCAD / RUNTIME:
• True real time performance provides ability to operate the
simulated power system interactively
• Simulator control
• Monitoring
• Data acquisition
• Manual mode
• Automatic mode
57
Simulation Software
Automated Batch Mode Testing:
• Script file
– High level programming language with
C like structure
– adaptive via if, for, and while statements
– user-defined subroutines
– customize reporting of result analysis
– automated plot printing
• Efficient means of running numerous cases
58
Simulation Software
Comprehensive library of component models available:
Power System
Component Model Library
Control System
Component Model Library
59
Machine Models
• The simplest model is that of a constant
speed ( frequency) machine consisting of an
ideal voltage source behind an appropriate
impedance. For an electromagnetic transient
study this would most likely be the machine
subtransient reactance.
E``
X``
This type of machine model would be appropriate in a study
where the transmission line being protected was represented
by lumped impedances and the time scale of interest was
several cycles. The relay bandwidth would be restricted to
50/60Hz and dc offset components. e.g.
Machine Trans.
E``
Line
Infinite BB
R
jX``
jx
jX
Relay
R
For longer time periods involving possible power
swings then the transient reactance would replace the
subtransient reactance and the machine inertia would
have to be represented by at least a single equivalent
mass. The moment of inertia, J, is for both the
turbine generator and exciter combined.
E`
Tm
X`
Inertia, J
Te
Swing Example
Here is a study involving a full dqo machine model with single
mass inertia and a single pole open and reclose feature at the relay
location R. There are two 100km distributed parameter lines
with a single phase fault half way along one of the lines.
Multi-mass machine models
• Single mass inertia models are probably OK
for hydro turbine sets.
• Steam turbines on the other hand have
multiple stages (HP, IP, LP) plus the
generator and exciter and may be much
larger than the hydro sets.
• Shafts have been damaged by mechanical
resonances excited by sub-synchronous
frequencies on the electrical network.
AVR’s, governors & PSS’s
• In studies where the inertia of the set is
relevant then we need to also include other
devices which produce effects in the time
window of interest.
• Governors are in general very slow except
in cases of “fast valving” on a steam set.
• Automatic voltage regulators and Power
Sytem Stabilisers will certainly be in play
during power swing conditions.
Conclusions
• Choose a model which suits the time scale of
interest.
• Where possible, compare any simulation results
with recordings to check for model validity.
• Models for internal faults are not generally
available and are actively being researched at the
present time.
Transformer Models
• Can be modeled in RTDS in three
fundamental ways
– The Ideal transformer model
– The Linear transformer model
– The built-in saturable transformer model
Ideal Transformer Model
• Ideal Transformer
– Ignores leakage flux
• Assumes flux is confined in the core
– Neglects Magnetizing Currents
• Assumes no core reluctance
Simple Transformer
Ac
i1
i2
+
V1
-
N1
+
N2
-
V2
Ideal Transformer Equations
d
V1 N 1
dt
V1 N 1
V2 N 2
d
V2 N 2
dt
I1 N 2
I2 N1
Linear Transformer Model
• In this case the magnetizing branch is
included in the model as an inductive branch.
Saturable Transformer Model
• Uses a star-circuit representation
• User could include saturation data
Transformer Model
Rp
Lp
Rs
Lm
n:1
Ideal
Transformer
Ls
Transformer V-I Curve Characteristic
Non-Linear region
V-I curve knee point
Voltage
Saturation voltage
Operating point
for voltage transformers
Linear region
Operating point
for current transformers
More in Section 10
Current
Non-linear Element Represented as
Piece-Wise Linear -i Function
( t )
(t - t)
slope
kn
iL
iL(t- t) iL(t)
kniLt iLt t t t t
Saturable Transformer Model
• The model requires as a minimum the
following data
– The voltage rating of each winding
– The leakage impedance of each winding
– The transformer connectivity information
Transmission Line Models
• RTDS users must know
– What kind of models are available
– Applicability of the various models for steady
state or transient studies
– Advantages and disadvantages of each model
EMTP Line Models
for Steady State Studies
• Line models for steady state studies
– Exact-pi model
– Nominal-pi model
Exact-Pi Model
• Exact-pi model
–
–
–
–
It is a lumped-parameter model
The model includes hyperbolic corrections
Frequency independent
Best model for steady state studies
1/Yseries
Yshunt /2
Yshunt /2
Exact-Pi Models
• It is a multi-phase line model and it takes into
account
– Skin effect and
– Circuits in the same right-of-way
• Not good for transient studies
Nominal-Pi Model
• Derived from the exact-pi model
– Ignores hyperbolic corrections
• Takes into account
– Skin effect and
Nominal-Pi Model
•
•
•
•
Multi-phase line model
Frequency Independent
No time step limitations
Not good for transient Studies
– Could be used if multiple Nominal-pi sections
are cascaded together
Nominal-Pi Model
• Model Limitations
– Cannot be Used for “Electrically Long Lines”
– Limited to lines with length < 150 Km at 60 Hz
– Limited to lines with length < 5 Km at 2 kHz
RTDS Line Models
for Transient Studies
• Line models for transient studies
– Nominal-pi model
– Frequency independent distributed parameter
line model
– Frequency dependent distributed parameter line
model
RTDS Line Models
for Transient Studies
• Nominal-pi
–
–
–
–
Not recommended for transient studies
Produces reflections at the cascading points
Computationally expensive
Sections must be kept very short { 5-10 km for
frequencies up to about 2 kHz}
RTDS Line Models
for Transient Studies
• Constant parameter distributed line model
– Bergeron model
– Model assumes that R’, L’, & C’ are constant
– L’ & C’ are distributed and the losses R’*l are
lumped in three places
– Shunt losses are ignored
RTDS Line Models
for Transient Studies
• Frequency dependent transmission line model
– Represents accurately the distributed nature of all line
parameters
– Frequency Dependent
– Transformation matrix is real and constant
– Most accurate for use in transient studies
RTDS Line Models
for Transient Studies
• The DP and FD models
– Use traveling wave solutions and are valid over a
wider frequency range
– Require transformations between phase and modal
domain
– Keep track of modal waves traveling at different
speeds
– When the modal propagation time ( or “travel time” )
of a line is less than the chosen simulation time−step
Δt, the line cannot be represented using these general
travelling wave models.
Conclusions
• Use pi-exact model for steady state studies
• Use fd-line models for lines of main interest in
your study
• Use cp-line models for lines of secondary
interest
Section 10
Relay Input Sources
is
ip
np
ns
CT load
(burden)
ip
Rp
Lp
Ideal
CT
Rs
Magnetizing
Branch
Ls
is
Burden
ip’
Rp
Lp
Es
Rs
Ls
is
im
imr
Rm
imx
Lm
Rl
ip’
Es
is
im
Rb
Current
source
Lm
CT Saturation for Symmetric Fault Currents
1000
600/5 A, C100 CT
with 1.5 total load resistance
100
7
15
CT ratio
error [%]
23
35
48
100
Voltage [V]
CT Secondary Current [A]
Ideal CT
10
10
Exciting Current [A]
10
0.1
1
10
100
CT Primary Current [A] (referred to the secondary)
100
1000
Lm is nonlinear inductor,
specified in piecewise linear form
-I data points are not readily available
ATP provides a routine SATURATION to
Vrms-Irms characteristics
into -I set
convert
9.2
Digital Models of
Coupling Capacitor Voltage Transformers
CCVT
A CCVT Circuit Connection
HV Bus Bar
C1
C2
PLC
Ld
LC
SDT
LP
FSC
ZB
A 138 kV CCVT Design
HV
C
1
138kV
L
d1
C
2
L
d1
SW1
R
d1
Cps
Rd1
G2
LC
RC
Lp
Ca
Rs
x1
G3
Cp
G
1
Ls
Rp
R
Cp
T
r
x
2
C
F
C
s
R
F
R
a
x3
y1
5kV/115V/66.4V
y2
LF
Rh
y3
Zb
Voltage Transformer
Digital Models
Rp
Lp
Rm Lm
Rs
Cp
n:1
Ideal
Transformer
Ls
Simulation Software
Component Builder:
103
RTDS Technologies Inc.
Applications
104
Applications
Closed-loop testing of protection systems:
105
Applications
Protection systems test methods:
• Synthetic testing
– Typical of test set used for routine testing
– No true power system signals used
– “Synthetic” waveforms are often unrealistic and in
some cases misrepresent how a relay will function
in service
106
Applications
Protection systems test methods:
• Playback testing
– Uses recorded or simulated power system signals
– Waveforms only valid until the relay trips
– Only one relay can be tested
107
Applications
Protection systems test methods:
• Closed loop testing
– Requires a real time simulator to provide realistic
power system signals
– Closed loop response allows complete interaction
between the relay and the simulated power system
– Multiple devices (relays and/or controllers) can be
tested as if connected to an actual power system
108
Applications
Closed-loop testing of protection systems:
Standard electrical connection
Digital I/O
Digital I/O
Digital to Analogue
Converters
125 Vdc
Power
Amps
Relay #1
125 Vdc
V
I
I
V
Power
Amps
Relay #2
109
Applications
Closed-loop testing of protection systems:
Interconnection via IEC 61850 GOOSE and Sampled Values
GTNET - SV
PROCESS
BUS
GTNET - SV
GTNET - GSE
STATION
BUS
Relay #1
Relay #2
110
111
Applications
Closed-loop testing of protection systems:
• Proven power system representation
R
RTDS
Real-Time Digital Simulator
• Advanced instrument transformer
models
Voltage and Current
Signals (low level)
DIGITAL INPUT / OUTPUT CHANNELS
1
2
3
4
5
6
7
8
....
....
9 10 11 12 13 14 15 16
• Script files for automated testing and
customized reporting
Amplified Voltages and
Currents (Sec. Levels)
DIGITAL INPUT / OUTPUT CHANNELS
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16
• Hardware interface
• Interaction studies providing a true
test for multiple relays and other
devices
• Suitable for low level testing of single
relays and multiple relays
• Flexible amplifier solutions
....
....
Trip and Reclose Signals
RTDS
Simulator
Voltage and
Current
Amplifiers
Interfacing to Protective
Protective
Relay(s)
Relays
Applications
Closed-loop testing of protection systems:
• Manufacturers
•
•
•
•
•
•
•
ABB Automation – Sweden
AREVA T&D – England
Basler Electric – USA
GE Multilin – Canada
Siemens AG – Germany
SEL – USA
TMT&D - Japan
•
•
•
•
•
Dong Fang - China
SiFang - China
Guodian Nanjing Automation - China
LGIS – South Korea
NxtPhase T&D - Canada
•
•
•
•
•
Guangxi EPRI - China
East China EPRI - China
Fujian EPRI – China
Sichuan EPRI – China
North China EPRI - China
• Utilities
•
•
•
•
•
•
REE – Spain
PG&E –USA
KEPCO – Korea
FURNAS – Brazil
CCGroup – China
SEC – Saudi Arabia
• Universities / Research & Test Institutes
•
•
•
•
China EPRI – China
Kinectrics – Canada
University of Bath – England
Wuhan University – China
•
•
•
•
CPRI – India
NTU – Singapore
University of Western Ontario – Canada
Xuchang Relay Institute - China
112
Applications
Closed-loop testing of control systems:
113
114
Applications
Testing of Excitation Controllers:
Static Exciter Test Circuit
Per unit conv ersion
8.2 V = 1 p.u.
RTDS Simulator
590 MVA
22 kV
50 km
22 kV : 230 kV
Main
Generator
Main
Grid
22 kV : 560 V
Controlled
Rectif ier
RTDS Analogue
Output
RTDS Digital
Input
DECS
300
Omicron
I
AMPS
25 V / V
5A/V
V
Low Voltage
< 24 Vdc.
AUX. POWER
Static Exciter
Low Voltage
+/- 10 Vpk.
115
Applications
Closed-loop testing of control systems:
• True real time required
• Large amount of data exchange
– 100’s of digital and analogue I/O
channels needed
• Improved firing for power electronics
Digital and Analogue
Signals
From RTDS to Controls
-commutating bus voltages
-dc current & voltage
-winding currents
-breaker status
Digital and Analogue
Signals
From Controls to RTDS
• Real time network solution
– more breakers
• Switched filter component
– more breakers with fewer nodes
-firing pulses
-block/bypass signals
-control variable monitoring
Interfacing to HVDC Controls
Applications
Commercial Control System Studies:
• HVDC (High Voltage Direct Current)
• SVC (Static Var Compensator)
• TCSC (Thyristor Switched
Series Cap.)
• Generator (Exciter,
Governor, PSS)
• STATCOM (3-level, PWM ~1200 Hz)
116
Applications
Closed-loop testing of control systems:
• Manufacturers
•
•
•
•
•
ABB Power Systems – Sweden
AREVA T&D – England
Basler Electric – USA
Siemens AG – Germany
Nokian Capacitors – Finnland
•
•
•
•
•
Fuji - Japan
Hitachi - Japan
Kinkei - Japan
Medensia – Japan
XJ Corporation
• Utilities
•
•
•
KEPCO – Korea
FURNAS – Brazil
Manitoba Hydro – Canada
• Fujian EPRI – China
• South Central Power China - China
• TNB - Malaysia
• Universities / Research & Test Institutes
•
•
CPRI – India
BDCC – China
• Kinectrics - Canada
• Xian High Voltage Apparatus Research Institute - China
117
Applications
General Power System Studies & Education:
• efficiency of real time
• frequency response
from 0-3kHz with one tool
• detailed control - power
system interaction
investigation
• Ongoing R & D to combine two
types of equivalence techniques
118
Applications
General Power System Studies & Education :
• Utilities
•
•
•
•
KEPCO – Korea
Kansai EPCo – Japan
Tohoku EPCo – Japan
BC Hydro – Canada
•
•
•
•
Chugoku EPCo – Japan
Takaoka EPCo – Japan
Manitoba Hydro – Canada
LADWP - USA
• Universities / Research & Test Institutes
•
•
•
•
•
•
CPRI – India
Clemson University – USA
J Power – Japan
University of Manitoba – Canada
University of Wyoming – USA
University of Cassino – Italy
•
•
•
•
•
•
ChangWon University – South Korea
Florida State University (CAPS) – USA
TU Delft / TU Eindhoven – The Netherlands
University of Western Ontario – Canada
University of Missouri-Rolla – USA
University of Durban – South Africa
119
RTDS Technologies Inc.
Validation
120
Validation
Validation:
• In-house
• Independent validation by
customers
• Commercial studies
• Industry benchmark cases
Electromagnetic Transient
Electromechanical Transient
Transient Stability
Load Flow / Steady State
121
Validation
Comparisons between RTDS and various references:
• EMTDC, EMTP, and Netomac
Non real time electromagnetic
transient simulation
• PSS/E, Y-Method, Netomac, and BPA
Transient stability
• PSS/E, Netomac, and BPA
Load flow
• CIGRE and IEEE
Benchmark cases
• Actual power system measurements
122
123
Validation
Commercial Studies:
Siemens
Grid Master Power Controller
ESKOM, South Africa
Braking
Filters Resistors
Bus Split
AC
DC
Cahora Bassa
Mozambique
H V D C C u rre n t ( k A )
Loads
220 kV
Songo
PAC
533 kV DC
330 kV AC
f P
GMPC
+
EC
1 .5
1 .5
0
0
1 .5
1 .5
0
0
R TD S
Bindura
PDC
Zimbabwe
PLC Signal
Transmission
GPS
1500 km
Interconnected
Grids
400 kV AC
Matimba
South Africa
Apollo
Signal Processing
for Control and
Protection
F ie ld
T es t
Model validation
Fault recordings
Near the fault bus
Analog Graph
MV1 EA
A dvanced Graph Frame
DM2 IA
Ias4
DM2 IB
Ics4
DM2 IC
Ibs4
4.0k
Vas5
600.000k
3.0k
400.000k
2.0k
1.0k
0.000
line #2
bus voltage
200.000k
-200.000k
0.0
-400.000k
-1.0k
-600.000k
-2.0k
-800.000k
MV1 EB
Vcs5
600.000k
Voltages
1.5k
1.0k
400.000k
0.5k
200.000k
0.0
0.000
line #2
bus voltage
Currents
-3.0k
-200.000k
-0.5k
-1.0k
-400.000k
-1.5k
-600.000k
-2.0k
Vbs5
1.5k
400.000k
1.0k
200.000k
0.5k
0.000
0.0
line #2
bus voltage
MV1 EC
600.000k
-200.000k
-0.5k
-400.000k
-1.0k
-600.000k
x
0.150
-1.5k
0.175
0.200
0.225
0.250
0.275
0.300
0.325
0.350
...
...
...
-2.0k
x
0.150
0.175
0.200
0.225
0.250
0.275
0.300
0.325
0.350
...
...
...
RTDS Technologies Inc.
Recent
Developments
125
Recent Developments
Continued development in both hardware and software
Aimed at meeting changing needs of power system
engineers and of the power system itself
Requirements:
more accurate power
system modelling
Resources:
more powerful processors
Led to
Further developments
in RTDS real time
simulation
126
Recent Developments
Recently developed models for GPC card:
Phase Domain Transmission Lines
UMEC Transformer
Voltage Source Converters
127
Recent Developments
128
Simulation:
Non Real Time:
•
Solution process is not hard real-time, hence
interpolation can be used even in large closely
connected networks with numerous switches
Real Time:
•
Hard real-time required, hence interpolation cannot
be applied in large closely connected networks with
many switches
•
VSC Bridge; Adequate valve firing resolution
provided by small time-steps
•
Main Network; simulation is more efficient with
larger time-steps
•
Conflicting requirements
•
Multiple timestep approach chosen
Challenge of VSC modelling
The main network --Requires a normal time step
of approximately 50 μs
The VSC model --Requires a firing resolution of
a few microseconds
129
Recent Developments
VSC Sub-Network
•
Efficient EMT simulation programs often utilize the
concept of sub-networks
STATCOM
RTDS
Simulator
V
•
Individual sub-networks can be solved in parallel
•
Taking this approach we map VSC bridges into
individual sub-networks
•
The VSC sub-network interfaces with the main circuit
•
The interface is similar to well known “hybrid”
analogue/digital real-time simulation methods
Voltage
Amplifier
D/A
I
V
Current
Measurement
A/D
Main Network
(50 us)
Analog VSC Model
(continuous solution)
V
I
- +
Current
Measurement
•
VSC interface is fully digital and eliminates difficulties
with D/A and A/D conversions as well as amplifiers
used in the hybrid simulator
•
Small time-step solution in the VSC sub-network is
interfaced to large time-step solution of the main
network
Main Network
(50 us)
STATCOM
RTDS
Simulator
RTDS
Simulator
Discrete Time-Step
VSC Model
(1.4 to 2.0 us)
Recent Developments
130
Example Simulation Test Case
Small time-step execution time minimized by linking pre-created machine language modules
Doubly fed induction machine with saturation
Six-pulse two-level bridge (two units)
Three-phase high pass filter bank
Three-phase RL branch
Capacitor branch
Three-phase interface transformer
Network solution equations
= 0.4 sec
= 0.22 sec (per unit)
= 0.09 sec
= 0.05 sec
= 0.025 sec
= 0.11 sec
= 0.2 sec
Total small time-step
execution time
Small time-step used
in example case
~ 1.32 sec
~1.67 sec
Recent Developments
131
Example Simulation Test Case
Validation of real-time results against PSCAD non real-time simulation with 50 sec time-step
RTDS
PSCAD
Recent Developments
More Recent Work
Real Time Simulation of 3-level STATCOM with 36 valves
132
RTDS Technologies Inc.
Conclusion
133
Conclusion
Impact of Real Time Digital Simulation Techniques:
Real time digital simulation:
• represents an important advancement in the understanding of power system
operation and performance
• allows more organizations to establish affordable and manageable in-house
simulation facilities
• combines the accuracy of digital models with the real time response of
traditional analogue simulators
• provides a mechanism to rigorously study and test the performance of new
and existing protection and control devices prior to installation in the actual
power system
• provides detailed knowledge of power system performance before, during,
and after an event
• increases confidence and reliability in the design, implementation and
operation of the electrical network and its complex components
134
RTDS Technologies Inc.
135
Additional Information:
• Our website
www.rtds.com
• Technical publications
– Multiple volumes of published papers available dating back to 1991
• Technical documentation and tutorials
– Including on-line reference
RTDS Technologies welcomes any questions or comments.
Please do not hesitate before, during and after installation to contact us.
Generator Controls
Generic controls:
• Controllers based on PSS/E models
Stabilizers
IEE2STPSS
IEEESTPSS
PSS2A
Governor / Turbine
GASTGOV
HYGOVGOV
IEESGOGOV
IEEEG1GOV
IEEEG2GOV
IEEEG3GOV
TGOV1GOV
Exciters
EXAC1AVR
EXAC1AAVR
EXAC2AVR
EXAC3AVR
EXAC4AVR
EXDC2AVR
EXST1AVR
EXST1AAVR
EXST2(A)AVR
EXST3AVR
EXPIC1AVR
136
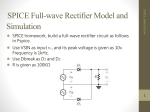
Generator Controls
Detailed exciter simulation:
• Static exciter with detailed rectifier circuit
137
Generator Controls
Detailed exciter simulation:
• Automatic voltage regulator
138
Generator Controls
Detailed exciter simulation:
• Protection
Under Excitation
Limiter
Stator Current
Limiter
Volts per Hertz
Limiter
Over Excitation
Limiter
139