Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Giant magnetoresistance wikipedia , lookup
Negative resistance wikipedia , lookup
Lego Mindstorms wikipedia , lookup
Superconductivity wikipedia , lookup
Power MOSFET wikipedia , lookup
Thermal runaway wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Nanogenerator wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
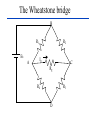
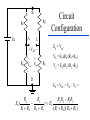
BASIC MECHANICAL SENSORS AND SENSOR PRINCIPLES Definitions • Transducer: a device that converts one form of energy into another. • Sensor: a device that converts a physical parameter to an electrical output. • Actuator: a device that converts an electrical signal to a physical output. Sensors : definition and principles Sensors : taxonomies • Measurand – physical sensor – chemical sensor – biological sensor(cf : biosensor) • Invasiveness – invasive(contact) sensor – noninvasive(noncontact) sensor • Usage type – multiple-use(continuous monitoring) sensor – disposable sensor • Power requirement – passive sensor – active sensor Potentiometers Helical Translational 𝑅𝑖 𝑥𝑖 𝑣0 = 𝑣𝑠 = 𝑣𝑠 𝑅 𝑙 Single turn The Wheatstone bridge B R1 Eb A R2 Ig C Rg R4 R3 D B R2 R1 A Eb C E0 = VAC + VAC R4 Circuit Configuration + VA - + VC D VA = EbxR4/(R1+R4) R3 VC = EbxR3/(R2+R3) E0 = VAC = VA – VC = R4 R3 R2 R4 R1R3 Eb ( ) Eb R1 R4 R2 R3 ( R1 R4 )( R2 R3 ) Null-mode of Operation B R2 = 600 R1 = 1000 Eb= 10 V A Ig 0 - C + At balance: R4 = Rx R3 D R2R4 = R1R3 or R1/R4 = R2/R3 and the output voltage is zero B Example 1 Assume that the bridge shown is used to determine the resistance of an unknown resistance Rx. The variable resistance is the resistance box that allows selection of several resistors in series to obtain the total resistance and it is set until null position in the meter observed. Calculate the unknown resistance if the variable resistance setting indicates 625.4. R2= 600 R1= 1000 Eb= 10 V Ig A 0 - C + R4= Rx R3 D The bridge will be balanced if R1/R4 = R2/R3 . Hence, R4 = Rx = R1/(R2/R3) = 1000x625.4/600 = 1042.3 . 9 Deflection-mode of Operation All resistors can very around their nominal values as R1 + R1, R2 + R2, R3 + R3 and R4 + R4. Sensitivity of the output voltage to either one of the resistances can be found using the sensitivity analysis as follows E0 R3 ( R1 R4 )( R2 R3 ) ( R2 R3 )(( R2 R4 R1 R3 ) S R1 Eb R1 ( R1 R4 ) 2 ( R2 R3 ) 2 R4 Eb ( R1 R4 ) 2 S R3 S R2 E0 R2 Eb R3 ( R2 R3 ) 2 E0 R3 Eb R2 ( R2 R3 ) 2 S R4 E0 R1 Eb R4 ( R1 R4 ) 2 The equivalent circuit B RT h Ig ET h = E0 Rg A + Eg - R1 R4 R2 D R3 RT h RTh = R1//R4 + R2//R3 ETh = E0 = VAC (open circuit) Ig = E0/(RTh + Rg) Eg = E0Rg/(RTh + Rg) In case of open-circuit (Rg) Eg = E0 C Stress and strain T L D A metal bar Tension: A bar of metal is subjected to a force (T) that will elongate its dimension along the long axis that is called the axial direction. Compression: the force acts in opposite direction and shortens the length Stress: the force per unit area a = T/A (N/m2) L+dL L dL T Strain A L T Bar with tension Strain: The fractional change in length a = dL/L (m/m) Breaking point Stress (a) Elastic Limit Strain Elastic Region Plastic Region ( a) The stress-strain relationship Hooke’s law Stress is linearly related to strain for elastic materials a = a /Ey = (T/A)/Ey Ey : modulus of elasticity ( Young’s modulus) Transverse strain The tension that produces a strain in the axial direction causes another strain along the transverse axis (perpendicular to the axial axis) as t = dD/D This is related to the axial strain through a coefficient known as the Poisson’s ratio as dD/D = - dL/L The negative sign indicates that the action is in reverse direction, that is, as the length increases, the diameter decreases and vice versa. For most metals is around 0.3 in the elastic region and 0.5 in the plastic region Electrical Resistance of Gage Wire R R R dR d dL dA L A T L D R=L/A L L dR d dL 2 dA A A A dR d dL dA R L A A = r2 = (/4)D2 and dA/A = 2 dD/D yields dD/D = - dL/L dR d dL (1 2 ) R L Piezoresistive effect Dimensional effect Principles of strain measurement K = (dR/R)/(dL/L) = (dR/R)/a Gage factor - K For wire type strain gages the dimensional effect will be dominant yielding K 2 For heavily doped semiconductor type gages the piezoreziztive effect is dominant yielding K that ranges between 50 and 200 dR can be replaced by the incremental change R in this linear region yielding R/R = Ka Bonded StrainGages Solid (fixed) platform Beam Strain Gage T A bonded gage Fixing the gage Examples of bonded gages Resistance-wire type Foil type K 2.0 R0 = 120 or 350 . 600 and 700 gages are also available Helical-wire type Semiconductor strain-gage units Unbonded, uniformly doped Diffused p-type gage Solid (fixed) platform Fixing the gage Beam Strain Gage T 20 21 Strain gage on a specimen 22 The unbonded gage Poles Prestrained resistive wire 23 Unbonded strain-gage pressure sensor Example 2 A strain gage has a gage factor 2 and exposed to an axial strain of 300 m/m. The unstrained resistance is 350 . Find the percentage and absolute changes in the resistance. a = 300 m/m = 0.3x10-3; R/R = Ka = 0.6x10-3 yielding %age change = 0.06% and R = 350x0.6x10-3 = 0.21 . 25 Example 3 A strain gage has an unstrained resistance of 1000 and gage factor of 80. The change in the resistance is 1 when it is exposed to a strain. Find the percentage change in the resistance, the percentage change in the length and the external strain (m/m). R/R (%) = 0.1 %; L/L (%) = [R/R (%)]/K = 1.25x10-3%, and a = [L/L (%)]/100 = 1.25x10-5 = 12.5 m/m 26 Wheatstone bridge for the pressure sensor Integrated pressure sensor Integrated cantilever-beam force sensor Elastic strain-gage Mercury-in-rubber strain-gage plethysmography (volumemeasuring) using a four-lead gage applied to human calf. Venous-occlusion plethysmography Arterial-pulse plethysmography Effect of Temperature and Strain in other Directions R R0[1 (T T0 )] R0 is the resistance at T0 and is the temperature coefficient This is very much pronounced in case of semiconductor gages due to high temperature coefficient. Effects of wanted strain (sw), unwanted strain (su) and temperature (T) add up in the change in resistance as R = Rsw + Rsu + RT The effect of unwanted strain and temperature must be eliminated before the resistance change is used to indicate the strain Bridge Configurations For Strain Gage Measurements B Solid platform Strain gage R1 R2 Q Eb A Ig C Rg W Cantilever R3 R4 = Rx D The cantilever beam with a single strain-gage element A quarter bridge Analysis of quarter-bridge circuit Let R1 = R2 = R3 = R and R4 = Rx = R + R = R(1 + R/R), and let x = R/R. The open circuit voltage E0 = 0 at balance (R = 0). At slight unbalance (R 0) R2 R4 R1R3 R( R R) R 2 R E0 Eb Eb Eb ( R1 R4 )( R2 R3 ) ( R R R)( R R) 2(2 R R) Let x = R/R x 1 (1 ) 1 2 x x E0 Eb Eb x 2(2 x) 4(1 ) 2 2 2 3 x x E x x ... E0 b ( x ...) 2 4 4 2 4 Since x<<1, higher order terms can be neglected yielding Eb Eb R E0 x 4 4 R Sensitivity analysis Sensitivity analysis can also be used S R4 E0 R1 Eb 2 R4 ( R1 R4 ) E0 R4 S R4 R Eb R Eb R 2 ( R R) 4 R Effect of Temperature and Tensile Strain • R = RQ + RW + RT • The effect of unwanted strain and temperature must be eliminated. • The circuit as it is provides no compensation. • Using a second strain gage of the same type for R1 can compensate effect of temperature. • This second gage can be placed at a silent location within the sensor housing, hence kept at the same temperature as the first one. • As a result, both R1 and R4 have the same amount of changes due to temperature that cancel each other in the equation yielding perfect temperature compensation Wheatstone Bridge with Strain Gages and Temperature Compensation 36 Bridge with Two Active Elements B Strain gages Q R1 R-R Eb A R2 Ig W Cantilever The cantilever beam with two opposing strain gages C Rg R4 R+R R3 D Circuit for the half-bridge Circuit analysis Let R2 = R3 = R; R1 = R - R; R4 = R + R, the open circuit voltage E0 = 0 at balance (R = 0). At slight unbalance (R 0) B R2 R4 R1 R3 E0 Eb ( R1 R4 )( R2 R3 ) R( R R) R( R R) Eb ( R R R R)( R R) 2R Eb R Eb 4R 2 R R1 R-R Eb A R2 Ig C Rg R4 R+R R3 D Insensitivity of half-bridge Wanted strain Unwanted strain Temperature R4 R1 Effects of wanted and unwanted strains and temperature on measuring gages Bridge with Four Active Elements (Full Bridge) Q R2 R4 R1 R3 W The cantilever beam with four strain gages (full bridge) The force, when applied in the direction shown, causes tension on gages at the top surface (R + RQ) and compression on gages at the bottom surface (R - RQ). The tensile force W causes (R + RW) on all gages. The temperature also produces (R + RT) on all gages. B R2 R+R R1 R-R Eb A Ig C Rg R4 R+R R3 R-R D R2 R4 R1R3 E0 Eb ( R1 R4 )( R2 R3 ) Eb •The strain gages that are working together are placed into opposite (nonneighboring) arms of the bridge. •The strain gage resistors are manufactured for a perfect match to have the open circuit voltage E0 = 0 at balance (R = 0). •At slight unbalance (R 0) with R1 = R3 = R - R; R2 = R4 = R + R ( R R)( R R) ( R R)( R R) R Eb ( R R R R)( R R R R) R Inductive sensors L = n2G, where n= number of turns of coil G = geometric form factor = effective permeability Self-inductance Differential transformer Mutual inductance LVDT transducer (a) electric diagram and (b) cross-section view LVDT +Q Capacitive sensors Q C 0 r A x Area = A x i v 1 dv/dt (a) i + C C (b) Capacitive displacement transducer (a)single capacitance and (b)differential capacitance sensitivity K C A 0 r 2 x x dC C or dx x dC dx C x V0 ( j ) X I ( j ) (E x0 ) j Capacitive sensor for measuring dynamic displacement changes j 1 where RC R 0 r A x0 q kf k is piezoelectric constant C/N kf kfx v C 0 r A q Kx dq dx is K iC iR dt dt K is proportionality constant C/m 1 v0 vC ( ) iC dt C dv dx v0 is i R C ( 0 ) K dt xt R V0 ( j ) K S j X ( j ) j 1 Piezoelectric sensors KS=K/C, V/m; = RC, s Response to step displacement High-frequency response High-frequency circuit model for piezoelectric sensor. RS is the sensor leakage resistance and CS the capacitance. Lm, Cm and Rm represent the mechanical system. Piezoelectric sensor frequency response. Quantum Tunneling Composites (a) Structure (b) Effect of pressure Structure and effect of pressure for QTC 51 Effect of Pressure on a QTC Pill 52 QTC as a Pressure Sensor 53