Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Flip-flop (electronics) wikipedia , lookup
Resilient control systems wikipedia , lookup
Immunity-aware programming wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power inverter wikipedia , lookup
Electrical substation wikipedia , lookup
PID controller wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Current source wikipedia , lookup
Distributed control system wikipedia , lookup
Stray voltage wikipedia , lookup
Amtrak's 25 Hz traction power system wikipedia , lookup
Voltage optimisation wikipedia , lookup
Voltage regulator wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Alternating current wikipedia , lookup
Two-port network wikipedia , lookup
Control theory wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Control system wikipedia , lookup
Mains electricity wikipedia , lookup
Distribution management system wikipedia , lookup
Schmitt trigger wikipedia , lookup
Power electronics wikipedia , lookup
Integrating ADC wikipedia , lookup
Opto-isolator wikipedia , lookup
Network analysis (electrical circuits) wikipedia , lookup
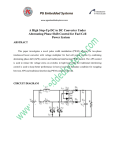
Proceedings of the 15th IEEE International Symposium on Intelligent Control (ISIC 2000) Rio, Patras, GREECE 17-19 July, 2000 AN APPLICATION OF A NEURAL PREDICTIVE CONTROLLER IN BOOST CONVERTER INPUT CURRENT CONTROL IVAN PETROVIƆ, MIROSLAV BARIƆ, ANTE MAGZAN‡, NEDJELJKO PERIƆ †University of Zagreb, Faculty of Electrical Engineering and Computing, Department of Automatic Control and Computer Engineering in Automation, Unska 3, Zagreb, CROATIA, [email protected], [email protected], [email protected] ‡ Polytechnics College of Zagreb, College of Electrical Engineering, Konavoska 2, Zagreb, CROATIA, [email protected] Abstract. An application of a non-linear predictive controller in the cascade control structure of an boost converter is investigated. The neuro-predictive controller is realized as a non-linear optimizer, using Levenberg-Marquardt unconstrained optimization procedure. For the prediction of future process response two MLP neural networks are used. One network is used for modeling the converter dynamics and the other one for an on-line estimation of the converter’s input voltage. This structure ensures good performance in all operating regions and inherent compensation of ripples in converter’s input current, caused by variations of the input voltage. Advantages of the proposed control structure are demonstrated through the experimental comparison to a linear GPC with manually adjusted feed forward compensator. Key Words. boost converter, input current ripples compensation, MLP neural networks, predictive control. 1.INTRODUCTION Converters used for supplying consumers with changeable voltage and frequency represent a load for the supply network (ac or dc) with current harmonics, which produce undesired electromagnetic disturbances and additional parasitic effects. Electromagnetic disturbances are particularly undesired in a supply network that is in conductive connection or near devices sensible to disturbances, such as telecommunication and/or signaling safety devices. The typical supply network with high demands on the permitted level of generated disturbances is the railway electric supply network. This is the reason why the International Railways Union regulations (UIC) require that high level requirements should be imposed on converters by means of which the allowed disturbance levels in this supply network are determined [1]. The European railway supply network is specific due to two types (ac and dc) and four levels of supply voltage and has specific additional requirements on converters. One of the important requirements when converter operates on a dc network (1500 V dc; 3000 V dc) is that the input impedance has to be higher than the impedance permitted by UIC regulations in the frequency range from 50 Hz to 100 kHz. The other requirement relating to the case when the converter operates on an ac network (25 kV ac, 50 Hz; 15 kV ac, 16 2/3 Hz) is the power factor greater than 0.95 in the input voltage range between 80 % and 120 % of the rated value. Boost converter is commonly used converter structure in these applications. It serves as an active filter at the input of the four-system converter [2, 3]. To meet above stated highdemanding requirements special attention should be paid to the converter control system. The conventional solution is to use a PI controller. PI controller doesn’t give satisfactory performances in all operating regions, due to the non-linear characteristic of the boost converter. Better results could be achieved if the Generalized Predictive Controller (GPC) is applied, because of its robustness to process parameter variations [5]. Neither PI nor GPC can provide satisfactory reduction of the converter input current ripples (causing electromagnetic disturbances) unless and additional feed forward compensator is applied [4,5]. The design of this compensator is not an easy task and should be done carefully. It requires quite a lot of manual adjustments, because any amplitude and/or phase shift between the compensation signal and the actual current ripples causes additional ripples. With the purpose to increase the performances of the input current control loop and to avoid the difficulties of controller and compensator adjustments, we have been investigated the usage of the neural networks in the design of the input current predictive controller. The paper is organized as follows. Section 2 gives more detailed description of boost converter control structure. Implementation of the NPC in the control of converter’s input current is described in Section 3. Experimental results are given is Section 4, where the developed controller is compared to a linear GPC. 2. CONTROL SYSTEM STRUCTURE Generally accepted structure of the control system is one of the cascade type, with converter input current control loop as the inner loop and converter output voltage loop as the outer, superimposed control loop (Fig. 1) [4]. The control of input current is realized by means of an input current controller Rii, which provides input voltage to the high frequency pulse width modulator (PWM) that controls the states of the power electronic switch V1 (Isolated Gate Bipolar Transistor, IGBT). Since it is necessary to stabilize the output voltage of the boost converter at a constant value, while varying load or input voltage, the output voltage controller Ruo is superimposed to the input current controller Rii, providing the reference value for the input current controller. In the functional block diagram of boost converter control (Fig. 1.) the dc-ac switch marks the control structure change when the converter works on a dc network or an ac network. The measured instantaneous value of the input voltage uim serves for the compensation of input voltage ripple influence on input current (switch on dc) when boost converter operates on a dc network. Moreover, it serves for generation of input current reference value (switch on ac) when boost converter operates on an ac network. In the presented control structure the measured filtered input voltage performs function of input current feed forward control when the converter operated on both a dc and an ac supply network. More detail description is given in [5]. Li ui V1 C0 ii uO -- --PWM up Rii uim dc ac ui + comp. + Input current controller iim - +i ir x Ruo Output voltage controller iimax + uom Filter uor Filter CONTROL COMPUTER Fig. 1. Functional block diagram of boost converter control. ( Ruo - output voltage controller; uor output voltage reference value; uom - output voltage measured value; Rii - input current controller; iimax input current maximum value; iir - input current reference value; iim - input current measured value; uim - input voltage measured value; up – input voltage to the PWM block). In order to control the converter-input impedance, when the converter operates on a dc supply network or the input power factor when converter operates on an ac supply network, it is necessary to realize a fast input current control loop. In research of boost converter input current control algorithms conventional and modern algorithms have been analyzed [4]. When the converter operates on a dc network the boost converter input voltage contains a high alternating component. The frequency of this alternating component is proportional to the frequency of an ac voltage from that is dc voltage obtained using a power electronic rectifier. Variations of the input voltage cause the high ripples in input current that should be eliminated or reduced to the smallest amount possible. As mentioned in the introduction, conventional control structures (PI) and more advanced ones (GPC) require additional feed forward compensator in order to successfully reduce ripples of the input current. This compensator usually requires a lot of manual adjustment that must be carried out every time when the frequency or the amplitude of the input voltage is changed. To avoid this and to achieve good controller performance in all operating regions an advanced control strategy based on neuro-predictive controller is investigated. 3. DESIGN OF THE NEURO-PREDICTIVE CONTROLLER The structure of the proposed neuro-predictive controller is given in Figure 2. NN1 uim(k) Input voltage In each sample k a sequence of future control signals up is obtained by the minimization of the criterion function: û im iˆi ( k N 1 ),, iˆi ( k N 2 ) N2 NN2 ( k ) Q(i ) yr ( k i ) ii ( k i ) 2 i N1 Nc Input current reference iir Optimization procedure up'(k) upmax up(k) upmin Boost converter p ( k i 1) u p ( k i 2) (2) i 1 Fig. 2. Neuro-predictive controller for input current control The developed controller consists of two multi-layer perceptron (MLP) neural networks and of the nonlinear optimizer. Neural network NN1 (Fig. 2) works as an online estimator of the converter’s input voltage and it is used for the prediction of its future values needed by the neural network NN2. As an adaptation algorithm recursive back-propagation with momentum is used. Neural network NN2 is used for modeling and prediction of the non-linear dynamics of the boost converter. Input signals to the process are input voltage to the PWM block up (control signal) and measured value of the input voltage uim, while the output signal is measured value of the input current iim (Fig. 2). The process is modeled by the following nonlinear discrete-time difference equation: iim ( k 1) f [iim ( k ),, iim ( k n1 1); u p ( k ),, u p ( k n2 1); , R(i ) u iim(k) , 2 (1) uim ( k ),, uim ( k n3 1)] where: k - is discrete time step; f - nonlinear map; n1, n2, n3 – number of past values of the corresponding variables. The output of the NN2 is used in the calculation of the control signal. By introducing measured and predicted values of the converter’s input voltage in the prediction of the input current, future input current ripples caused by the input voltage variations can also be anticipated. In this way the compensation of the disturbances is included in the control action, i.e. the compensator and the input current controller are joined. Both neural networks (NN1 and NN2) are initially trained off-line as NARX models [9]. NARX model predicts the future value of the input current one step ahead and is used during the initial training of networks. When operating, networks are used in the so-called NOE configuration [9] that enables multiple step ahead predictions. NN1 and NN2 are realized as two-layered MLPs with tansig activation function in the hidden layer. An efficient Newton-type algorithm with implicit regularization is employed to initially adjust network weights [7]. N1 and N2 denote the first and the second prediction horizon, and Nc the control horizon, Q and R are sequences of the weighting factors, ii is a sequence of model outputs for the current control sequence up, yr denotes the desired, referent response – the, so called, reference trajectory, defined as: yr ( k i ) iir (1 ) yr ( k i 1) , (3) where [0,1]. By minimizing (2) an optimal control sequence up=[up(k),...,up(k+N2-N1+1)] is obtained, from which the first element is used as a process input. At the next time step, ii , yr, and up are shifted by one step and the complete procedure is repeated. This strategy is the well-known “receding horizon” control strategy [9], [10]. The first term in (2) is a measure of the distance between the predicted process output y and the reference trajectory yr. A non-linear model, represented by a neural network, is used for predicting outputs of the process. If the model is accurate, minimization of (2) makes the process track the reference trajectory. The second term in (2) penalizes excessive changes of the controller output. At the same time, minimizing this part of the criterion function slows the response of the closed-loop system down and increases the tracking error. A trade-off between these two objectives must be found by properly choosing the weighting factors Q and R. The core of the non-linear predictive controller is the optimization algorithm used for the minimization of the criterion function (2). In this paper LevenbergMarquardt unconstrained optimization algorithm is used to obtain the controller output. Since the boost converter control signal has its minimum and maximum value that should not be exceeded, a modification of the predictive controller structure is made (see Fig. 2). The process is considered to have a limiter in the form of a continuous differentiable function at its input, which transforms the unlimited controller output u'p to the process input up within the specified limits, up[upmin, upmax]. We used the sigmoid function: , (4) up F 1 expG Hu up max up min F G H u up min g u'p p max u 2 p max p min IJIJ u KK p min where g is the coefficient that determines the slope of the limiter. The same limiter is attached to the model input, as shown in Fig. 2. No constraints on the variable u p exist and its optimal value can be obtained by using an unconstrained optimization algorithm, giving at the same time optimal value of the actual control variable up within the specified limits. The detailed description of the algorithm is given in [9]. 4. EXPERIMENTAL RESULTS Experimental investigations of the performances of the neuro-predictive controller were done on a laboratory model of the boost converter (power 2.5 kW) with IGBT switch (Fig. 3). The control system has been implemented using MATLAB/SIMULINK® program package and its Real-Time Workshop. The experiments were conducted separately for dc and for ac supply networks. varied manually in random fashion via autotransformer. 2N values of up and iim had been collected during the experiment. Then the neural network NN2 (Fig. 2) was trained on the first half of data, while the second half of data were used for the regularization and validation purposes [8]. The MLP network with one hidden layer with 10 neurons (tansig activation functions) was used. Input vector to the neural network NN2 was [iim(k), iim(k-1), uim(k), uim(k), up(k)]. Network NN1 was initially trained to approximate full wave rectified sinusoidal input 10 pt voltage. A two-layered MLP network with 5 tansig neurons in the input layer is used. During the operation of the controller, the network continues to adapt itself using simple recursive back-propagation algorithm in order to catch possible amplitude and/or frequency changes of the input voltage signal. A comparison to the linear Generalized Predictive Controller is made. The results obtained from the laboratory model of the boost converter are given in Figures 4-6. Fig. 4. The response to set point changes of the GPC without feed forward compensator Fig. 3. Laboratory model of the boost converter. a) Boost converter supplied from the dc network The analysis of input current control loop, when the converter operates on a dc network has been carried out on a boost converter physical model with Li=84 mH input inductor inductance and C0=3.75 mF output condenser capacitance. The boost converter is supplied by variable voltage ui obtained from autotransformer connected to single-phase network of 220 V, 50 Hz. With regard to full wave rectified network voltage, the boost converter input voltage contains a high alternating component with a frequency of 100 Hz. The neuro-predictive controller is designed on the basis of identification experiments. In the identification experiment the process has been excited by the Band Limited White Noise (BLWN) signal up while the input voltage ui has been Fig. 5. The response to set point changes of the GPC with feed forward compensator The same neural controller was used as in the first experiment when boost converter had been supplied from the dc network. Fig. 7. and Fig. 8. show input current step responses obtained on the laboratory model of boost converter. It can be concluded that the NPC provides good tracking performance of the current loop, which implies high input power factor of the converter. 20 Reference and measured value [A] 18 16 14 12 10 8 6 4 2 0 5. CONCLUSION 0 1 2 3 4 5 time [s] Fig. 6. The response to set poin change of the boost converter controlled by NPC It can be seen that neuro-predictive controller successfully compensates input current ripples. The results obtained by the NPC are better than these obtained by the GPC with feed forward compensator. The feed forward compensator has been adjusted manually for the specific operating range of the converter and its performance decreases outside this region due to its linearity. b) Boost converter supplied from the ac network In order to provide high power factor, it is necessary to ensure higher active power, i.e. it is necessary to ensure phase angle between input voltage and input current as close to zero as possible for all voltage and current harmonics starting from the fundamental one. The use of neuro-predictive controllers for the control of the input current of boost converter has been investigated. The investigation of the control system has been carried out for the cases when the converter is supplied from a dc network and from an ac network. The obtained results are very satisfactory in both cases. Besides, it is much easier to adjust the neuropredictive controller than the PI controller or GPC controller. 6. REFERENCES [1] [2] 3 Reference and measured value [A] 2.5 [3] 2 1.5 1 0.5 0 0.98 0.985 0.99 0.995 1 time [s] 1.005 1.01 1.015 1.02 [4] Fig. 7. Response to positive step in the AC operating mode Reference and measured value [A] 3 [5] 2.5 2 1.5 1 [6] 0.5 0 1.485 1.49 1.495 1.5 time [s] 1.505 1.51 1.515 Fig. 8. Response to positive step in the AC operating mode [7] UIC-Kodex, 550 VE (1995). Elektrische Energieversorgungseinrichtungen für Wagen der Reisezugwagenbauart, 9. Ausgabe vom 01.01.1995, Bureau Central de UIC, Paris, 1995. Lai, J-S., Hurst, D., Key, T. (1991). SwitchMode Power Supply Power Factor Improvement via Harmonic Elimination Methods, Proceedings of PESC, pp. 415-422, 1991. Magzan, A., Rajković B., Perić, N. (1998). Research into possibilities to increase input impedance of voltage and frequency converter fed from DC network, Proceedings of 10th International Conference on Electrical Drives and Power Electronics, pp. 86-91, Dubrovnik, Croatia. Magzan, A. (1999). Algorithms and Structures of Power Transistor Converters Control Fed from Single Phase Network, Ph.D. thesis, Faculty of Electrical Engineering and Computing, Department of Control and Computing Engineering in Automation, Zagreb (in Croatian). Magzan, A., Perić, N., Petrović, I. (1999). Generalized Predictive Controller Applied in Boost Converter Input Current Control, CDRom proceedings of the 8th European Conference on Power Electronics and Applications - EPE’99, Paper # 537, Lausanne, Switzerland. Kung, S. Y. (1993). Digital Neural Networks. PTR Prentice Hall, Englewood Cliffs, New Jersey. Petrović, I., Baotić, M., Perić, N. (1998). An Efficient Newton-type learning Algorithm for MLP Neural Networks, Proceedings od the International ICSC/IFAC Symposium on [8] [9] [10] Neural Computation – NC’98, pp. 551-557, Vienna, Austria. Petrović, I., Baotić, M., Perić, N. Regularization and validation of neural network models of nonlinear systems, Elektrotechnik & Informationtechnik, 1/2000, pp. 24-31, Springer-Verlag, Vienna, Austria. I. Petrović et. al. (1999) A Neuro-Predicitve Controller for Industrial Processes, Computational Intelligence for Modelling, Control and Automation, IOS Press, 1999. D.G. Sbarbaro Hofer, Connectionist Feedforward Networks for Control of Nonlinear Systems, Ph.D. thesis, The Faculty of Engineering of Glasgow University, 1992.