Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Power factor wikipedia , lookup
Electric power system wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Ground (electricity) wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Electrification wikipedia , lookup
Power inverter wikipedia , lookup
Electrical ballast wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Current source wikipedia , lookup
Induction motor wikipedia , lookup
Power electronics wikipedia , lookup
Stepper motor wikipedia , lookup
Electric machine wikipedia , lookup
Stray voltage wikipedia , lookup
Earthing system wikipedia , lookup
Electrical substation wikipedia , lookup
Voltage regulator wikipedia , lookup
Single-wire earth return wikipedia , lookup
Power engineering wikipedia , lookup
Surge protector wikipedia , lookup
Opto-isolator wikipedia , lookup
Magnetic core wikipedia , lookup
Buck converter wikipedia , lookup
Voltage optimisation wikipedia , lookup
History of electric power transmission wikipedia , lookup
Three-phase electric power wikipedia , lookup
Mains electricity wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resonant inductive coupling wikipedia , lookup
EE6401
ELECTRICAL MACHINES I
Prepared by:R Shalini/AP-EEE,(M.E.T Engg College)
UNIT I
MAGNETIC CIRCUITS
Magnetic Circuits
ò H.dl
Ampere’s law
=
C
ò B.da = 0
òJ.da
H : magnetic field intensity vector, J : current density.
S
Þ magnetic flux density is conserved
B : magnetic flux density vector.
S
B = mH
m = mrm0 : magnetic permeability of medium.
m0 : permeability of free space m0=4p ´10-7
mr : relative permeability
Simple magnetic circuit.
d = Ni
H. dl
ò
C
=
òS
F
J
: magnetomotive force (mmf, ampere-turns).
Magnetic flux crossing surface S:
f = òB.da
(Weber, Wb)
S
f c @ Bc Ac
f
c
:flux in core,
Bc : flux density in the core
Ac : cross-sectional area of the core.
H.dl
@
Hclc
ò
C
Þ f
F
Â
Þ
Bc
m
 = lc
mAc
lc = Ni = F
Þ
: reluctance
f
mAc
lc = F
Fig. 1.2 Magnetic circuit with air gap.
Flux is the same in the magnetic core and the
f
Bc =
Þ
Bg =
f
flux density in the air-gap.
Ag
ò
mmf
flux density in the magnetic core.
Ac
Þ
C
F = f ( Âc + Â g )
Þ
Bg
Bc
H.dl = Hclc + Hg g = Ni = F
Þ f=
F=
m0 A
F
æ
m
lc +
m0
ö
g=fç
÷
è
+ç
÷
m Ac ø
g
Âc : reluctance of core, Âg : reluctance of air-gap.
Analogy between electric and magnetic circuits.
(a) Electric circuit, (b) magnetic circuit.
Example 1.1 The magnetic circuit shown in Fig.1.2 has dimensions Ac = Ag = 9 cm2, g = 0.050
cm, lc = 30 cm, and N = 500 tums. Assume the value mr = 70,000 for core material. (a) Find the
reluctances Âc and Âg . For the condition that the magnetic circuit is operating with Bc = 1.0 T,
find (b) the flux f and (c) the current i.
Solution:
(a)
Âc =
Âg=
(b)
(c)
f
i=
lc
mrm0 Ac
g
m0 Ac
=
=
0.3
70000´ 4p ´10-7 ´9 ´10-4
= 3.79 ´103 A.turns/Wb
5´10-4
5
4p ´ 10-7 ´ 9 ´ 10-4 = 4.42 ´10 A.turns/Wb
= Bc Ac = 1.0(9´10-4) = 9´10-4 Wb
F
N =
9´10-4(4.46´105)
(Âc + Âg)
N
=
500
= 0.8 A
i -gap fringing fields.
Ar
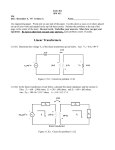
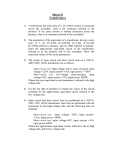
Example 1.2 The magnetic structure of a synchronous machine is shown schematically in Fig.
1 5. Assuming that rotor and stator iron have infinite permeability ( m ®¥), find the air-gap flux
f and flux density Bg. For this example I = 10 A, N = 1000 turns, g = 1 cm, and Ag = 2000 cm2.
Solution: total air-gap length = 2g. Reluctance of iron core is negligible ((m ®¥).
Rg =
2g
m0 Ag
f
Bg =
Þ f=
F
Rg
=
Nim0 Ag
1000´10´ 4p
0.2
2g
Ag
0.2
´
= 0.13 Wb
2 ´ 0.01
0.13
=
´10-7
= 0.65 T
Simple synchronous machine.
FLUX LINKAGE, INDUCTANCE AND ENERGY
d
Faraday’s law.
ò E. ds = - dt òB. da
C
S
dl
df
e = dt = N
dt
e : induced voltage,
l = Nf : flux linkage (Wb-turns).
Linear magnetic circuit: flux linkage is proportional to current.
Inductance:
L=l
i
l = Nf =
NF
N 2i
Rtot
Rtot
Þ
L=
N
2
Rtot
If the reluctance of the core is negligible compared to that of the air-gap
2
N2
L=
=
g ö
æ
N m0 Ag
g
ç
÷
ç m0 Ag ÷
ø
è
(Henry, Weber-turn /A)
Example 1.3
The magnetic circuit of Fig. 1.6a consists of an N-turn winding on a magnetic core of infinite
permeability with two parallel air gaps of lengths g1 and g2 and areas A1 and A2, respectively.
iFn
d
(a) The inductance of the winding and
(b)The flux density Bl in gap 1 when the winding is carrying a current i. Neglect fringing effects
at the air gap.
Solution:
(a)
Req =
L=
R1R2
R1 + R2
N2(R1 + R2 )
R1 =
æ
= m0 N ç
f=
1
Ni m0 A1Ni
=
R1
g1
R2 =
1
g2
m0A2
A1 A2 ö
÷
+
èg 1 g 2 ø
R1R2
(b)
g1
m0A
f1
Þ
B1 =
m0Ni
=
A1
g1
(a) Magnetic circuit and
(b) equivalent circuit for Example 1.3.
Magnetic circuit with two windings.
F = N1i1 + N2i2
The total mmf:
Neglect the reluctance of the core, and assume Ac = Ag, the resultant core flux produced by the
total mmf is
f=
F
Rg
N1i1 + N2i2
m0 Ac
=
=g( N1i1 + N2i2 )
g
m0 Ac
Flux linkage of coil 1,
l
Þ
l =L
1
æ m0 Ac ö
1
= N1f = N12 ç
è g
÷ i1
ø
Aö
+ æ m0 cç
è g ø
÷i2
2
i + L12i2
11 1
L11i1 :flux linkage of coil 1 due to its own current. L11 = N12 ç
æ m0 Ac ö
è
L12i2 :flux linkage of coil 1 due to current i2. L12 = N1N
and 2
g
æ m0 Ac ö
2
ç
÷
g
è
: self-inductance of coil 1
÷
ø
: mutual-inductance between coils 1
ø
Similarly, flux linkage of coil 2,
l
Þ
l
2
æ m0 Ac ö
2
= N 2f = N1N
2
Ac ö
÷ i12æ
ç
è g
ø
m02
è
ç
g ø
÷ i2
= L21i1 + L22i2
L21 = L12 = N1N
2
æ m0 Ac ö
ç
è g
÷
: mutual-inductance,
ø
dl
dt
=
Ac ö
L22 2=æ m0 ç
è g ø
d
di
dL
(Li) = L
+i
d
dt
dt
t
÷
: self-inductance of coil 1
In electromechanical energy conversion devices, inductances are often time-varying.
Power and Energy
Power delivered to the winding:
p = ei = i
dl
dt
(Watts, W= Joules/ second)
Change in magnetic stored energy DW in the magnetic circuit in the time interval tl to t2
t2
l2
t1
l1
DW = p dt = i dlò ò
Single- winding system of constant inductance, the change in magnetic stored energy as the flux
level is changed from l1 to l2
l
l2
2
DW = òi dl
=
=ò
l1
l
dl
2L
l1 L
Example 1.6
1
(l2 - l 2 )1
Þ
W (l ) =
l
2
or W (i) = 1Li2
2L
2
: total stored magnetic energy.
For the magnetic circuit of Example 1.1 (Fig. 1.2), find (a) the inductance L, (b) the magnetic
stored energy W for Bc = 1.0 T, and (c) the induced voltage e for a 60-Hz time-varying core flux
of the form Bc = 1.0 sin(ωt) T where ω = 2πf = 2π(60) = 377 rad/sec.
L=
(a)
l
i
=
Nf
i
f=
F
Âc + Âg
(b) From Example 1.1, Bc = 1.0 T
(c)
dl
df
= N dB = NAc
c
dt
= 170cos(377t) V
e=
F = Ni
Þ
Þ
L=
i = 0.8 A
2
5002
N
=
= 0.56 H
Âc + Âg 4.46´105
Þ
W = 1Li2 =
2
1
(0.56)(0.82 ) = 0.18 J
2
= 500´ 9 ´10-4 ´ (377 ´1.0cos(377t) )
PROPER TIES OF MAGNETIC MATERIALS
· Magnetic materials are used to constrain and direct magnetic fields in well-defined paths.
· In a transformer they are used to maximize the coupling between the windings, and to
lowerthe excitation current required for transformer operation.
· In electric machinery, they are used to shape the magnetic fields to obtain desired
electrical and mechanical characteristics.
Ferromagnetic materials are composed of iron and alloys of iron with cobalt, tungsten, nickel,
aluminum, and other metals, are the most common magnetic materials.
Relationship between B and H for a ferromagnetic material is nonlinear and multivalued: B-H
curve or hysteresis loop.
B-H loops for M-5 grain-oriented electrical steel 0.012 in thick. Only the top halves of the
loops are shown here.
Dc magnetization curve for M-5 grain-oriented electrical steel 0.012 in thick.
AC EXCITATION
Sinusoidal core flux:
j (t) = f
max
sinwt = AcBmax sinwt
Voltage induced in the N-turn winding,
e(t) = w Nfmax coswt = Emax coswt
Emax = wNf max = 2p fNAcBmax
Rms value of a periodic function of time,
T
Frm s =
1
2
Tò
f (t)dt
0
Erms =
Emax
2
= wNf max = 2p fNAcBmax
Exciting current: current required to produce magnetic flux in the core; nonsinusoidal because
of the nonlinear magnetic properties of the core.
Sources of power loss in the core:
1-) Eddy currents: currents induced by the time-varying flux in the core due to nonzero
conductivity of the material. These currents cause ohmic I2R loss.
To reduce the effects of eddy currents, magnetic structures are built of thin sheets of
laminations of the magnetic material. These laminations are aligned in the direction of the field
lines, and are insulated from each other by an oxide layer.
2-) Hysteresis loop: The time-varying excitation causes the magnetic material to undergo a cyclic
variation described by a hysteresis loop.
Energy input W to the magnetic core of Fig. 1.1 as the material undergoes a single cycle
W=
òi
dl
æ Hclcö( A
NdBc ) =
j
ò ç N ÷ cø
Alc : volume of the core. c
dBc : area of the ac hysteresis loop.
H
ò
c
Hysteresis power loss = W´ f
ò
Aclc
c
H
dBc
Excitation phenomena. (a) Voltage, flux, and exciting current; (b) corresponding
hysteresis loop.
Exciting rms voltamperes per kilogram at 60 Hz for M-5 grain-oriented electrical t
el 0.012 in thick.
se
Hysteresis loop; hysteresis loss is proportional to the loop area (shaded).
Core loss at 60 Hz in watts per kilogram for M-5 grain-oriented electrical steel 0.012 in thick.
Laminated steel core with winding for Example 1.8.
Example 1.8 The magnetic core in Fig. 1.15 is made from laminations of M-5 grain-oriented
electrical steel. The winding is excited with a 60-Hz voltage to produce a flux density in the steel
of B = 1.5 sin ωt T, where ω = 2π60 = 377 rad/sec. The steel occupies 0.94 of the core
crosssectional area. The mass-density of the steel is 7.65 g/cm3. Find (a) the applied voltage, (b)
the peak current, (c) the rms exciting current, and (d) the core loss.
a.
Voltage induced
e=N
dj
= NAc
dBc
æ
dt
dt
= 274cos(377t) V
b
1 m2 ö
= 200´ 4 in2 ´0.94´ç
è39.4 in2
÷
´1.5´ 377cos(377t)
ø
Hm ax = 36 A-turns/m
Bmax = 1.5 T
Þ
lc = 0.71 m.
Þ
peak current I =
Bmax = 1.5 T
Þ
Þ
Pa = 1.5 VA/kg
3
Vc = 105.5 in .
Hmaxlc
36´ 0.71
Wc = 13. 2 kg.
Total rms volt-amperes:
Pa = 1.5 VA/kg ´ 13.2 kg = 20 VA
Ij ,rms =
20
Pa =
= 0.10 A
275
/ 2
Erms
11
. A magnetic circuit with a single air gap is shown in Fig. 1.24. The core dimensions are:
Cross-sectional area Ac = 1.8 × 10-3 m2
Mean core length lc = 0.6 m
Gap length g = 2.3 x 10-3 m
N = 83 turns
Assume that the core is of infinite permeability (m ®¥) and neglect the effects of fringing fields
at the air gap and leakage flux . (a) Calculate the reluctance of the core Rc and that of the gap Rg .
For a current of i = 1.5 A, calculate (b) the total flux f , (c) the flux linkages λ of the coil, and (d)
the coil inductance L.
Solution:
(a)
Rc = 0 since m ® ¥
(b)
f=
(c)
l = Nf = 1.016´10-2 W b
(d)
L=
Ni
Rc + Rg
l
i =
Rg =
g
m0Ac
=
2.3 ´ 10-3
= 1.017 ´106 A/Wb
4p ´ 10-7 ´ 1.8 ´ 10-3
83 ´ 1.5
= 1.017 ´106 = 1.224 ´ 10-4 W b
1.016 ´ 10-2
1.5
= 6.773 mH
1 3 Consider the magnetic circuit of Fig. 1.24 with the dimensions of Problem 1.1. Assuming
infinite core permeability, calculate (a) the number of turns required to achieve an inductance of
12 mH and (b) the inductor current which will result in a core flux density of 1.0 T.
Solution:
(a) L =
N2
Rg
= 12 ´10-3 mH
Þ
12 ´ 10-3 ´1.017 ´ 106 = 110.47
N=
Þ
N =110 turns
(b)
Þ f = Bg Ac = 1.8 ´ 10-3
Nf 110 ´1.8 ´10-3
=
= 16.5 A
L
12 ´ 10-3
Bc = Bg = 1.0 T
i=
l
L
=
Wb
113 The inductor of Fig. 1.27 has the following dimensions:
Ac = 1.0 cm2
lc = 15 cm
g = 0.8 mm
N = 480 turns
Neglecting leakage and fringing and assuming mr = 1000 , calculate the inductance.
Solution:
L=
l
l = Nf = NBc Ac
i
mmf equation: Hclc + Hglg = Ni
Bc = Bg
Þ
Bc =
m0Ni
g + (lc / mr )
Þ
Bc
Bg
mrm0
lc +
m0
2
Þ
L=
g = Ni
m0N Ac = 4p ´ 10-7 ´ 4802 ´10-4 = 30.477 mH
g + ( lc / mr [0.08 +(15 /1000)]´ 10-2
)
1 14 The inductor of Problem 1.13 is to be operated from a 60-Hz voltage source. (a) Assuming
negligible coil resistance, calculate the rms inductor voltage corresponding to a peak core flux
density
of
1.5
T.
(b)
Under
this
operating
con
energy.
Solution:
(a)
dl
dBc
v(t) = dt = NAc dt Bc = Bmax sinwt Þ v(t) = wNAcBmax coswt
1
1
ÞVrms = w NAcBmxa = (2p ´ 60) ´ 480 ´ 10-4 ´1.5 = 19.2 V
2
2
(b)
I rs
m =
11
Vrms
w L = 1.67 A
1 2k
1
Wpeak = LIpa = ´ 30.477 ´ 10-3 ´ ( 2 ´ 1.67)2 = 85.0 mJ
2
2
6 A square voltage wave having a fundamental frequency of 60 Hz and equal positive and
negative half cycles of amplitude E is applied to a 1000-turn winding surrounding a closed
iron core of 1.25 x 10-3m2 cross section. Neglect both the winding resistance and any effects
ofleakage flux.
(a) Sketch the voltage, the winding flux linkage, and the core flux as a function of time.
(b) Find the maximum permissible value of E if the maximum flux density is not to
exceed 1.15 T.
(a)
e
E
λmax
voltage
T
λ
Φ
t
λmax
E
(b)
lmxa - (-lmxa ) = 4 f lmxa = 4 fNfmxa = 4fNAcBmxa
e(t) = dl Þ l òe(t).dt Þ E =
T/2
dt
-3
Þ E = 4 ´ 60 ´1000 ´1.25´10 ´1.15 =345 V
1.24 The reciprocating generator of Fig. 1.34 has a movable plunger (position x) which is
supported so that it can slide in and out of the magnetic yoke while maintaining a constant air
gap of length g on each side adjacent to the yoke. Both the yoke and the plunger can be
considered to be of infinite permeability. The motion of the plunger is constrained such that its
position is limitedto 0 £ x £ w .
There are two windings on this magnetic circuit. The first has N1 turns and carries a constant
dc current I0. The second, which has N2 turns, is open-circuited and can be connected to a load.
(a) Neglecting any fringing effects, find the mutual inductance between windings 1
and 2 as a function of the plunger position x.
(b) The plunger is driven by an external source so that its motion is given by
x(t) =
where
generated as a result of
e
w(1 + e sin wt)
2
< 1. Find an expression for the sinusoidal voltage which is
this m otion.
(a)
L21 = N1N
ç
Ac(x) = D(w - x)
2g
÷
(b)
æ m0 Ac( x) ö
2
v2 = dl2
dt
dx
dt
l 2 = L21i1 Þ
1
= we wcosw t
2
Þ
dL2
v2 = I0
v2 = -I
0
1
dt
= I0
dL21 dx
= -I
dx dt
æ m0 N1N2 Dwe w ö
÷ o wt
4g
è
ø
ç
æ m0 N1N2D ö dx
0
ç
è
2g
÷.
ø dt
UNIT II
TRANSFORMER
A transformer is a static machine which transfers ac electrical power from one
circuit to another without any electrical link between. It essentially consists of two
windings- the primary and secondary, wound on a common laminated magnetic core. The
winding connected to the ac source is called primary winding and the one connected to
load is called secondary winding. The alternating voltage V1 is applied to the primary.
Depending on the no. of turns of primary(N1) and secondary (N2), the alternating emf,
E2 is induced in the secondary.
Working Principle
When a sinusoidally varying voltage V1 is applied to the primary, an alternating flux Φ is
set up in the core. This flux links both the windings and induces emfs E1 and E2 in them
according to Faraday’s laws of electromagnetic induction.
According to Lenz’s law, induced emf acts in opposite direstion to the appl ied
voltage V1.
d
Ie. E1
=
N1
E2
=
-N2
Therefore
f
dt
f
d
E2
N2
=
E1 N1
dt
= K where K is known as voltage transformation ratio.
If N2>N1 then E2>E1, it will be a ste
If N1>N2 then E1>E2, it will be a step down transformer.
Ideal Transformer
An ideal transformer is one that has
1. no winding resistance
2. no leakage flux
3. no iron loss.
EMF Equation of a Transformer
Consider an alternating voltage V1 of frequency f applied to primary of the transformer.
This develops a primary current which sets up an alternating flux Φ
The instantaneous emf induced in the primary is
e1= -N1
df
df
= -N1 m
dt
sinw t
= -ω N1 Φm Cosωt
=-2 П f N1 Φm Cosωt
= 2 П f N1 Φm sin(ωt-90)
It is clear from the above equation that maximum value of induced emf in the primary is
Em1=2 П f N1 Φm
the rms value E1=Em1/ 2
= 4.44 f N1 Φm
E2=4.44 f N2 Φm
Transformer Construction
The main elements of a transformer are two windings and a core. The two coils are
insulated from each other as well as from the core. The core is constructed from laminations of
sheet steel or silicon steel assembled to provide a continuous magnetic path. Silicon steel offers
low hysteresis loss and the laminations minimizes eddy current loss. The laminations are
insulated from each other by a light coating of varnish. According to the core construction and
the manner in which the primary and secondary are placed around it, transformers are classified
as
1. core type
2. Shell type
LOSSES IN TRANSFORMER
The losses in transformer are
1. iron losses or core losses
2. Copper losses
Iron losses
Since iron core is subjected to alternating flux, there occurs eddy current and hysteresis loss in it.
These two losses together known as iron losses and core losses. Both hysteresis and eddy current
losses depends on maximum flux density Bm
Iron loss
= Hysteresis loss + Eddy current loss
Copper Losses
`
The primary and secondary of the transformer have winding resistances of R1 and R2
respectively.
Total copper loss
=
I12 R1 + I22 R2
Where I1 and I2 are primary and secondary currents.
Total losses in a transformer =
Pi
+ Pc
EFFICIENCY OF A T RANSFORMER
Transformer Efficiency
=output power
Input power
Iron loss of a transformer
= Pi
Full load copper loss
= Pc
Total full load loss
= Pi + Pc
Full load efficiency
= Full load VA *P.f
Full load VA * P.f + Pi+Pc
For any fraction x of the full load
efficiency
=
x Full load VA * P.f
x*Full load VA * P.f + Pi+x2 Pc
Power Transformer
Power Transformers are used in generating stations or sub stations for transforming
voltage at each end of transmission line. They are put in operation during load hours and thrown f
during
light load hours. These transformers are designed to have maximum efficiency at or near
of
full load. Normally the power transformers are rated in MVA.
Distribution Transformer
Distribution Transformers are used for stepping down the voltage to a standard voltage
and kept near or at the consumer’s premises.They are continuously in circuit whether they are
carrying any load or not. He core losses would occur for all tha time where copper losses occur
only when they are loaded. So they are designed to reduce the core losses compared to copper
losses. They must be designed for good all day efficiency and not for efficiency at full load.
Instrument Transformer
Instrument transformers are used to extend the range of instruments for the measuring
purposes. They are of two types
1. Current transformers for measuring large ac currents
2. Potential transformers for measuring high ac voltages
Fig.2.1 Schematic views of (a) core-type and (b) shell-type transformers.
Figure 2.2 Cutaway view of self-protected distribution transformer typical of sizes 2 to 25 kVA,
7200:240/120 V. Only one high-voltage insulator and lightning arrester is needed because one
side of the 7200-V line and one side of the primary are grounded. (General Electric Company.)
No-Load Conditions
Exciting current
winding
ij
establishes an alternating flux in the core. Voltage induced in the primary
e1 =
dl1
dt
= N1
d
j
dt
KVL eqn. for the primary winding :
v1 = R1ij + e1
R1: primary resistance
(primary leakage flux neglected)
Resistance drop is very small Þ induced voltage e1 is very nearly equal to the applied voltage.
Hence, it is almost sinusoidal. Therefore, the flux is also sinusoidal .
j = jmax sinwt Þ e1 = N1
dj
= wN1jmax coswt
dt
E1 @V1
Þ j
Rms value: E1 =
1
2
2p fN1j
max
= 2p fN1j
max
V1
max
=
2p
The core flux is fixed by the applied voltage. The required exciting current is determined by the
magnetic properties of the core.
Figure 2.4 Transformer with open secondary.
ˆ
I
: core-loss component of exciting current; supplies the power
due to hysteresis and eddy current losses.
c
Pc = E1Ij cosqc
ˆ
I
: magnetizing component;
m
Figure 2.5 No-load phasor diagram.
The Ideal Transformer
Figure 2.6 Ideal transformer and load.
v1 = e1 = N1
dj
dt
Core flux links the secondary and induces the voltage e2 :
Þ
v2 = e2 = N 2
dj
dt
v1 = N1
N2
v2
When a current in the secondary winding flows, the total mmf should be zero since the
reluctance of the core is very large.
Þ
N1i1 - N2i2 = 0
Instantaneous power:
Þ
i1 N2
=
i2 N1
v1i1 = v2i2
Figure 2.7 Three circuits which are identical at terminals ab when the transformer is ideal.
Example 2.2
The equivalent circuit of Fig. 2.8a shows an ideal transformer with an impedance R2 + j X2 = 1 +
j4 Ω connected in series with the secondary. The tums ratio N1/N2 = 5:1. (a) Draw an equivalent
circuit with the series impedance referred to the primary side. (b) For a primary voltage of 120 V
rms and a short connected across the terminals A-B, calculate the primary current and the current
fo
l wing in the short.
Figure 2.8 Equivalent circuits for Example 2.2. (a) Impedance in series with the secondary.
(b) Impedance referred to the primary.
Figure 2.9 Schematic view of mutual and leakage fluxes in a transformer.
ˆ
¢
I2 is the component of the primary current which exactly counteracts the mmf of the secondary
ˆ
ˆ
current I2 . The net mmf is produced by the exciting current
Ij (n
i the primary winding).
Therefore the net mmf is
ˆ
ˆ
N1Î j = N1I1 - N2I 2
ˆ
ˆ
Þ
= N1(Î j + I2 ¢) - N2I 2
N2 ˆ
ˆ
I 2¢ =
I2
N1
Þ
ˆ
ˆ
N1I 2¢ = N2I 2
T
he equivalent sinusoidal current Iˆ that represents the exciting current can be resolved into aj
core-loss component Ic in phase with the emf Ê 1 , and a magnetizing component Im lagging Ê1
by 90°.
Rc : core-loss resistance
Lm : magnetizing inductance
Þ
magnetizing reactance: Xm = 2p f Lm
Ê1
core loss due tothe resultant mutual flux =
2
Rc
excitation branch
Exciting impedance Zj =Rc / / jXm
Ê1
N1
=
Ê2 N2
Figure 2.10 Steps in the development of the transformer equivalent circuit.
2
Xl¢2 =
æ
R¢ = ç
Nö
æ
ç
è N2 ø
N1 ö
2
÷
è N2 ø
V2¢=
X l2
R2
N1V2
N2
Example 2.3
A 50-kVA 2400:240-V 60-Hz distribution transformer has a leakage impedance of 0.72 + j0.92
Ω in the high-voltage winding and 0.0070 + j0.0090 Ω in the low-voltage winding. At rated
voltage and frequency, the impedance Zj of the shunt branch (equal to the impedance of Rc and
jXm in parallel) accounting for the exciting current is 6.32 + j43.7 Ω when viewed from the
lowvoltage side. Draw the equivalent circuit referred to (a) the high-voltage side and (b) the
lowvoltage side, and label the impedances numerically.
Approximate equivalent circuits
Equivalent series impedance = Re q + j Xeq
Example 2.4
Consider the equivalent-T circuit of Fig. 2.11a of the 50-kVA 2400:240 V distribution
transformer of Example 2.3 in which the impedances are referred to the high-voltage side. (a)
Draw the cantilever equivalent circuit with the shunt branch at the high-voltage terminal.
Calculate and labelReq and Xeq. (b) With the low-voltage terminal open-circuit and 2400 V
applied to the high-voltage terminal, calculate the voltage at the low-voltage terminal as
predicted by each equivalent circuit.
Req = 0.72 + 0.70 = 1.42 Ω
Xeq = 0.92 + 0.90 = 1.82 Ω
Vcd =Vab = 2400 V
The equivalent T-circuit
632 + j4370 ö
2400ç
÷
ç Z j + Z l1 ÷
è632.72 + j4370.92 ø
ø
è
= 2399.4 + j0.315 V
æ
Vc¢d ¢ = 2400 ç
Zj
ö
æ
÷=
Example 2.5
The 50-kVA 2400:240-V transformer whose parameters are given in Example 2.3 is used to step
dow n the voltage at the load end of a feeder whose impedance is 0.30 + j 1.60 Ω. The voltage Vs at
the sending end of the feeder is 2400 V. Find the voltage at the secondary terminals of the
transformer when the load connected to its secondary draws rated current from the transformer
and the power factor of the load is 0.80 lagging. Neglect the voltage drops in the transformer and
feeder caused by the exciting current.
Zeq = 1.42 + j 1.82 Ω
Ztot = 1.72 + j 3.42 Ω = R + j X
Î=
V
q = cos-1(0.8) = 36.87
50000
2400 = 20.83 A
Þ
ˆ2¢+ (R + jX )Iˆ = ˆs = 2400Ðd
Þ
V¢= 2328.3 V
Þ
lagging (i.e. current lags voltage)
Î = 20.83Ð -36.87 A = 16.66 - j12.5 A
Þ
(V ¢+71.41)2 +35.482 = 24002
æ N2 ö
V= ç
÷V ¢ =
V N1 ø
232.83
Short-Circuit Test
Zj (R2 + jXl 2 )
Zsc = R1 + jXl1 + Zj + R2 + jXl 2
Þ
Zc
s
Zj
R1 + jXl1 + R2 + jXl 2 = Req + j
R2 + jXl 2
e
V ¢= V2ˆ¢
Vsc, Isc and Psc measured
Zeq = Zsc =
Vsc
Isc
, Req =
Þ
Psc
Xeq =
,
2
Isc
q2
Zeq
- Re
Open-Circuit Test
Figure 2.16 Equivalent circuit with open-circuited secondary. (a) Complete equivalent circuit.
(b) Cantilever equivalent circuit with the exciting branch at the transformer primary.
Voc, Ioc and Poc measured
Zoc = Zj =
Rc ( jXm )
Rc + jXm
Þ
Rc =
Vo2
,
Zj =
Voc
Poc
1
Xm =
,
Ioc
2
(1 / Zj ) -(1 / Rc )2
Example 2.6
With the instruments located on the high-voltage side and the low-voltage side short-circuited,
the short-circuit test readings for the 50-kVA 2400:240-V transformer of Example 2.3 are 48 V, 2
. A, and 617 W. An open-circuit test with the low-voltage side energized gives instrument
readings on that side of 240 V, 5.41 A, and 186 W. Determine the efficiency and the voltage
regulation at full load, 0.80 power factor lagging.
From the short-circuit test,
Zeq,H =
48
= 2.31 W
2
, Re q,H =
617
2
2
= 1.42 W
,
Xeq,H =
2.312 -1.422 = 1.82 W
50000
At fullload (transformer supplying 50 kVA to the load at 240 V),
Power factor = 0.8
Þ
Pl
od
a
IH =
= 20.8 A
2400
= Potu = 50 000 × 0.8 = 40 000 W
2
Resistive power loss on winding resistances: PR = Req,H IH = 1.42´ 20.82 = 617 W
From open-circuit test, Pcore = 186 W
Total losses,
Ploss = PR + Pcore = 803 W
Total power supplied from high-voltage wind
Efficiency =
Pout
Pin
40000
=
40803
Pin = Pout + P
´100 % =98 %
Voltage Regulation:
ˆ
ˆ
At full load, V2¢ = 2400Ð0 V, I H = 20.8Ð -cos-1 0.8 = 20.8Ð -36.87 A = 16.64 - j12.48 A
Vˆ1 = Vˆ ¢+ (
e
+ jXeq)IˆH = 2400 + (1.42 + j1.82)(16.64 - j12.48)
= 2446 + j13 V
2446 - 2400
Regulation =
2400
´ 100% = 1.92%
TRANSFO RMERS IN THREE-PHASE CIRCUITS
Figure 2.19 Common three-phase transformer connections; the transformer windings are
indicated by the heavy lines. ( N1 / N2 = a )
Example 2.8
Three single-phase, 50-kVA 2400:240-V transformers, each identical with that of Example 2.6,
raeconnected Y-D in a three-phase 150-kVA bank to step down the voltage at the load end of a
feeder whose impedance is 0.15 + j 1.00 Ω/phase. The voltage at the sending end of the feeder is
4160 V line-to-line. On their secondary sides, the transformers supply a balanced three-phase
load through a feeder whose impedance is 0.0005 + j0.0020 D/phase. Find the line-to-line
voltage at the load when the load draws rated current from the transformers at a power factor of
0.80 lagging.
Threephase
load
LV feeder
HV feeder
Single-phase equivalent circuit:
0.15+ j 1.0 Ω
1.42 + j 1.82 Ω
0.15+ j 0.6 Ω
+
VH
Load
_
The voltage at the sending end of the feeder is
Vs =
4160
3
= 2400 V line-to-neutral
The low-voltage feeder impedance referred to the high voltage side,
æ 4160ö
Zlv,H = ç
÷
è 240 ø
2
´ (0.0005+ j0.0020) = 0.15+ j0.60 W
Combined series impedance of the high- and low-voltage feeders referred to the high-voltage
side,
Z feeder,H = 0.30 + j1.6 W/phase-Y
The equivalent single-phase series impedance of the transformer is equal to the single-phase
series impedance of each single-phase transformer as referred to its high-voltage side
Zeq,H = 1.42 + j1.82 W/phase-Y
Therefore, the single-phase equivalent circuit for this system is identical to that in Example 2.5.
Vload = 2329 V line-to-neutral referred to the HV side.
240
Referred to the LV side: Vlao d = 2329
´æç
3
÷
4160 ø
è
\
Line-to-line Vo
= 3 ´134 = 233 V
l ad
The per-unit system
Actual quantity
Quantity in per-unit =
Base value of quantity
P
base,
Qbase ,VAbase = VbaseIbase
(P,Q,VA)up
on base 2
Rbase , X base, Zbase =
Vbase
Ibs
ae
éVAbae s1 ù
ê
ú
ëVAbae s2 û
= (P,Q,VA)pu on base 1 ´
æ
(R, X , Z )up on base 2 = (R, X , Z )pu on base 1 ´ ç
Vbase 1
ö æVAbase 2
ö
֍
÷
è Vbase 2 ø èVAbase 1 ø
Example 2.12
The equivalent circuit for a 100-MVA, 7.97-kV:79.7-kV transformer is shown in Fig. 2.22a. The
equivalent-circuit parameters are:
XL = 0.040 W, XH = 3.75 W, Xm = 114
W,
RL = 0.76 mW, RH = 0.085 W
Note that the magnetizing inductance has been referred to the low-voltage side of the equivalent
circuit. Convert the equivalent circuit parameters to per unit using the transformer rating as base.
Base quantities:
LV side:
100 MVA, Vbase=7.97 kV
2
Ra
b se
ae
s=
VAb
Vbase
= Xbase =
HV side:
VAa
= 0.635 W
Þ
XL =
b se
0.040
7.6´10-4
114
= 0.063 p.u., RL =
= 0.0012 p.u., Xm =
= 180 p.u.
0.635
0.635
0.635
ae
VAb s = 100 MVA, Vbase=79.7 kV
Rbase = Xbase =
Va
b2se
= 63.5 W
VAab se
Þ
XH =
3.75
63.5
= 0.0591 p.u., RH =
0.085
= 0.0013 p.u.
63.5
Example 2.13
The exciting current measured on the low-voltage side of a 50-kVA, 2400:240-V transformer is
5.41 A. Its equivalent impedance referred to the high-voltage side is 1.42 + j 1.82 Ω. Using the
transformer rating as the base, express in per unit on the low- and high-voltage sides (a) the
exciting current and (b) the equivalent impedance.
Base values:
Vbase,H = 2400 V, Vbase,L = 240 V, Ibase,H = 20.8 A, Ibase,L = 208 A
2400
Þ
Zbase,H =
20.8
= 115.2 W, Zbase,
L
=
240
= 1.152 W
208
5.41
(a)
Per-unit value of exciting current referred to the LV side:
Per-unit value of exciting current referred to the HV side:
1 42 + j1.82
(b)
Ij ,L = 208 = 0.026 p.u.
0.541
Ij ,H =
= 0.026 p.u.
2
= 0.0123+ j0.0158 p.u.
Zeq,H =
115.2
The equivalent impedance referred to the LV side,
æ
1ö
Zeq,L = ç10 ÷
´ (1.42 + j1.82) = 0.0142 + j0.0182
W
è ø
Per-unit value
Zeq,L = 00142 + j0.0182 = 0.0123+ j0.0158 p.u.
1 152
3.7 Approximate Equivalent Circuits
The voltage drops I1R1and I1X1(Fig.3.11e) are normally small and
then the shunt branch (composed of
E1 @ V1. If this is true
Rc1and Xm ) can be moved to the supply terminal, as
shown in Fig.3.12a. This approximate equivalent circuit simplifies computation of currents,
because both the exciting branch impeda connected across the supply voltage. Besides, the
winding resistances and leakage reactances can be lumped together. This equivalent circuit
(Fig.3.12a) is frequently used to determine the performance characteristics of a practical
transformer.
In a transformer, the exciting current
Io
is a small percentage of the rated current of the
transformer (less than 5%). A further approximation of the equivalent circuit can be made by
removing the excitation branch, as shown in Fig.3.12b. The equivalent circuit referred to side 2 is
also shown in Fig.3.12c.
Fig.3.12 Approximate equivalent circuits.
3.8 Transformer Rating
The
kVA
rating
and
voltage
ratings
of
example, a typical transformer may carry the following information on the nameplate: 10 kVA,
1100/ 110 volts. What are he meanings of these ratings? The voltage ratings indicate that the
transformer has two windings, one rated for 1100 volts and the other for 110 volts. These
voltages are proportional to their respective numbers of turns, and therefore the voltage ratio also
represents the turns ratio ( a = 1100/ 110 = 10). The 10 kVA rating means that each winding is
designed for 10 kVA. Therefore the current rating for the high-voltage winding is 10,000/ 1100 =
9.09 A and for the lower-voltage winding is 10,000/110 = 90.9 A. It may be noted that when the
rated current of 90.9 A flows through the lowvoltage winding, the rated current of 9.09 A will
flow through the highvoltage winding. In an actual case, however, the winding that is connected
to the supply (called the primary winding) will carry an additional component of current
(excitation current), which is very small compared to the rated current of the winding.
3.9 Determination Of Equivalent Circuit Parameters
The equivalent circuit model (Fig.3.12(a)) for the actual transformer can be used to predict the
behavior of the transformer. The parameters
R1, Xl1, Rc1, Xm1, R2, X l2
and a = N1 / N2
must be known so that the equivalent circuit model can be used.
If the complete design data of a transformer are available, these parameters can be calculated
from the dimensions and properties of the materials used. For example, the winding resistances
(R1, R2 ) can be calculated from the resistivity of copper wires, the total length, and the
cross-sectional area of the winding. The magnetizing inductances
Lm can be calculated from the
number of turns of the winding and the reluctance of the magnetic path. The calculation of the
leakage inductance
(L l ) will involve accounting for partial flux linkages and is therefore
complicated. However, formulas are available from which a reliable determination of these
quantities can be made.
These parameters can be directly and more easily determined by performing tests that involve
little power consumption. Two tests, a no-load test (or open-circuit test) and a short-circuit test,
will provide information for determining the parameters of the equivalent circuit of a transformer.
3.9.1 N o-Load Test (Or Open-Circuit Test)
This test is performed by applying a voltage to either the high-voltage side or low-voltage
side, whicheveris convenient. Thus, if a 1100/ 110 volt transformer were to be tested, the voltage
would be applied to the low-voltage winding, because a power supply of 110 volts is more
readily available than a supply of 1100 volts.
A wiring diagram for open circuit test of a transformer is shown in Fig.3.13 a. Note that the
secondary winding is kept open. Therefore, from the transformer equivalent circuit of Fig.3.12a
the equivalent circuit under open-circuit conditions is as shown in Fig.3.12b. The primary current is
the exciting current and the losses measured by the wattmeter are essentially the core losses.
The equivalent circuit of Fig.3.13b shows that the parameters c Rand
Xm1 can be determined from
1
the voltmeter, ammeter, and wattmeter readings.
Note that the core losses will be the same whether 110 volts are applied to the low-voltage
winding having the smaller number of turns or 1100 volts are applied to the high-voltage winding
having the larger number of turns. The core loss depends on the maximum value of flux in the
core.
(a)
(b)
Fig.3.13 No-load (or open-circuit) test. (a) Wiring diagram for open-circuit test. (b)
Equivalent circuit under open circuit
3.9.2 Short-Circuit Test.
This test is performed by short-circuiting one winding and applying rated current to the other
winding, as shown in Fig.3.14a. In the equivalent circuit of Fig.3.12a for the transformer, the
impedance of the excitation branch (shunt branch composed of Rc1 and X
m1
) is much larger than
that of the series branch (composed of
the
high
impedance
Req1 and Req1 ). If the secondary terminals are shorted,
of
the
shunt
branch
c
secondary short-circuited can thus be represented by the circuit shown in Fig.3.14 b. Note that
2
since Zeq1 = Re21 + Xeq1
is small, only a small supply voltage is required to pass rated current
through the windings. It is convenient to perform this test by applying a voltage to the
high-voltage winding.
As can be seen from Fig.3.14b, the parameters Req1 and Xeq1 can be determined from the
readings of voltmeter, ammeter, and wattmeter. In a well designed transformer, R1 = a2 R2 = R2 ¢
and Xl1 = a2 Xl2 = Xl¢ .
Note that because the voltage applied under the short-circuit condition is small, the core losses
are neglected and the w attmeter reading can be taken entirely to represent the copper losses in the
windings, represented by I12Req1.
Fig.3.14 Short-circuit test. (a) Wiring diagram for short-circuit test. (b). Equivalent circuit at
short-circuit condition.
The following example illustrates the co o f a transformer
Example 3.4 Tests are performed on a 1 f , 10 kVA, 2200/220 V, 60 Hz transformer and the
following results are obtained.
(a) Derive the parameters for the approximate equivalent circuits referred to the low-voltage
side and the high-voltage side.
(b) Express the excitation current as a percentage of the rated current.
(c ) Determine the power factor for the no-load and short-circuit tests.
Solution:
Note that for the no-load test the supply voltage (full-rated voltage of 220V) is applied to the
low-voltage winding, and for the short-circuit test the supply voltage is applied to the
high-voltage winding with the low-voltage Equivale winding shorted. The ratings of the
windings are as follows:
V1(ra e ) = 2200 V
V2(r ttdd ) = 220 V
10000
I1( aae ) =
= 4.55 A
2200
10000
rted
I2(rated ) =
= 45.5 A
220
The equivalent circuit and the phasor diagram for the open-circuit test are shown in Fig.3.15a.
Pow er,
o
Pc
=
V22
Rc2
2202
Then Rc2 =
= 484 W
100
Ic2 =
220
484
Im2 =
Xm2 =
= 0.45 A
(I2 - I22 )= (2.52 - 0.452 )= 2.46A
V2
22
= 89.4 W
=
Im2
2.46
The corresponding parameters for the high-voltage side are obtained as follows:
Turns ratio a
=
2200
= 10
220
Rc1 = a2Rc2 = 102 *484 = 48 400 W
Xm1 = a2Xm2 =102 *89.4 = 8940 W
The equivalent circuit with the low-voltage winding shorted is shown in Fig.3.15b.
Po wer Psc
= I1 2
Then, Req1
e1
215
=
4552 =
Zeq1 =
Vsc1
Isc1
Then, Xeq1
10.4 W
15 0
=
=
4.55
Z
2
= 32.97 W
2
Fig.3.15
The corresponding parameters for the low-voltage side are as follows:
Req2 =
Xeq2 =
Req1
10.4
=
= 0.104 W
a2
102
Xeq1
31.3
=
= 0.313 W
2
a2
10
The approximate equivalent circuits referred to the low-voltage side and the high-voltage
side are shown in Fig.3.15c. Note that the impedance of the shunt branch is much larger than that
of the series branch.
(b) From the no-load test the excitation current, with rated voltage applied to the low-voltage
winding, is:
Io = 2.5A
This is
25 *100% = 5.5% of the rated current of the winding
45.5
Power
c power factor at no load =
volt ampere
100
=
= 0.182
220*2
215
Power factor at short circuit condition =
150 * 4.55
= 0.315
Example 3.5 Obtain the equivalent circuit of a 200/400-V, 50 Hz, 1 phase transformer
from the following test a :-O C. test : 200 V, 0.7 A, 70W-on LV side
S C. test : 15 V, 10 A, 85 W-on HV side
Calculate the secondary voltage when delivering 5 kW at 0.8 power factor lagging, the primary
voltage being 200 V.
Solution:
From O.C. Test
Po = Vo Io * cosj
\ cosj o =
Then
j
o
Po
70
=
Vo Io 200*0.7
-1
o
o = cos 0.5 = 60
Then Ic1
= Io cosj
o
= 0.5
= 0.7*0.5 = 0.35A
Im1 = Io sin j o = 0.7*0.866 = 0.606A
Vo1 200 = 571.4 W
Then Rc1 =
=
Ic1 0.35
And Xm1
200
= 330 W
= Vo1 =
06
Im1 06
As shown in Fig.3.16, these values refer to primary i.e. low-voltage side
From Short Circuit test:
It may be noted that in this test instruments have been placed in the secondary i.e. highvoltage
winding and the low-voltage winding i.e. primary has been short-circuited.
Now ,
Zeq2 =
V2sc 15
=
=1.5W
I2sc 10
2
æ1 ö
2
Zeq1 = a * Zeq2 = ç ÷ *1.5 = 0.375W
è 2ø
Also, Psc
= I2sc Req2
85
Then, e 2
Then, Req1
Then, e 1
=
100
= 0.85W
æ1 ö
2
= a2 * Req2 = ç ÷ *0.85 = 0.21 W
è 2ø
=
Ze21 - Re21 = 0.3752 - 0.212 = 0.31 W
Fig.3.16
real power
Output K VA =
Power factor
Output current I2
Now,
from
Then, V2
5
08
= 6.3 kVA
5000
=
0.8* 400
aproximate
the
V2 Ð0o = V1¢Ðd
=
o
- I2 Ð j
o
o
Ð 0 = 400Ðd
V2Ð 0o = 400Ðd
o
o
= 15.6A
equivalent
circuit
refeared
* Zeq 2
- 15.6Ð- 36.87o *(0.85 + j1.2)
- 15.6Ð -36.87o *1.5Ð 54.7o
to
secondery
:
o
V2Ð0 = 400Ðd
o
- 23.4Ð18.17o
From the above equation we have two unknown variables
V2 and
do
it need two
equations to get both of them. The above equation is a complex one so we can get two equations
out of it. If we equate the real parts together and the equate the imaginary parts:
So from the Imaginary parts:
V2 sin (0) = 40 0 sin do - 23.4*sin 18.1 7o )
( )
( )- 7.41
0 = 400*sin d
Then, d
o
o
(
o
= 7.4o
So from the Real parts:
V2 cos (0) = 400 * cos(7.41o - 23.4* cos 18.1 7o )
)
Then, V2
(
= 374.5 V
Example 3.6 A 50 Hz, 1
- f transformer has a turns ratio of 6. The resistances are 0.9 W,
0.03 W and reactances are 5W
and 0.13 W
for high-voltage and low-voltage, windings
respectively. Find (a) the voltage to be applied to the HV side to obtain full-load current of 200 A
in the LV winding on short-circuit (b) the power factor on short-circuit.
Solution:
The turns ratiois a
=
N1
=6
N2
Req1 = R1 + a2 R2 = 0.9 + 62 * 0.03 = 1.98 W
Xeq1 = X1 + a2 X2 = 5 + 62 *0.13 = 9.68 W
Zeq1 = Re21 + Xeq21 = 1.982 + 9.682 = 9.88 W
I1 =
I2
200
= 33.3
=
3A
a
6
(a) s = I 1 * e 1 = 9.88*33.33 = 329.3V
Zq
Vc
(b)
cos j =
Req1
Zeq1
=
1.98
9.88
= 0.2
Example 3.7 A 1 phase, 10 kVA, ,500/250-V, 50 Hz transformer has the following constants:
Resistance: Primary 0.2 W ; .Secondary 0.5W
Reactance: Primary 0.4W ; Secondary 0.1 W
Resistance of equivalent exciting circuit referred to primary,
Rc1 =
1500W
Reactance of equivalent exciting circuit referred to primary, Xm1
= 750
W.
What would be the readings of the instruments when the transformer is connected for the
open-circuit and-short-circuit tests?
Solution:
O C. Test:
V 1 500 2
=
= A
X m 750 3
Im 1 =
Ic 1 =
V1
Rc1
=
500 1
= A
1500 3
2
Io =
æ1 ö
2
æ 2ö
ç ÷ + ç ÷ = 0.745 A
è3ø è3 ø
1
= 167W
No load prim ary input V 1 * Ic1 = 500 *
3
Instruments used in primary circuit are: voltmeter, ammeter and wattmeter, their readings
being 500 V, 0745 A and 167 W respectively.
S C. Test
Suppose S.C. test is performed by short-circuiting the LV, winding i.e. the secondary so that
all instruments are in primary.
Req1 = R1 + R2¢= R1 + a2 R2 = 0.2 + 4 * 0.5 = 2.2 W
Xeq1 = X1 + X2¢= X1 + a2 X2 = 0.4 + 4*0.1 = 0.8W
Then, Zeq1
=
Re21 + Xe21 = 2.22 + 0.82 = 2.341 W
Full-load primary current
Rated kVA
I1 =
10000
=
= 20 A
Rated Pr imaryvoltage
500
Then Vsc = I 1 * e 1 = 20*2.431 = 46.8V
Power absorbed =
I12* Req1 = 202 * 2.2 = 880W
Primary instruments will read: 468 V, 20 A, 880 W.
3.10 E fficiency
Equipment is desired to operate at a high efficiency. Fortunately, losses in transformers are
small. Because the transformer is a static device, there are no rotational losses such as windage
and friction losses in a rotating machine. In a well-designed transformer the efficiency can be as
high as 99%. The efficiency is defined as follows:
h=
output power (Potu)* 10
0 =
Input Power( Pin )
Pout
Pout + Losses
*100
(3.14)
The losses in the transformer are the core loss (Pc) and copper loss (Pcu ). Therefore,
h=
Pout
Pout
=
Pout + Losses Pout + Pc + Pcu
(3.15)
The copper loss can be determined if the winding currents and their resistances are known:
2
2
Pcu = I1 R1 + I2 R2
)
= I12Req1 = I22Req2
The copper loss is a function of the load current.
The core loss depends on the peak flux density in the core, which in turn depends on the
voltage applied to the transformer. Since a transformer remains connected to an essentially
constant voltage, the core loss is almost constant and can be obtained from the no -load test of a
transformer. Therefore, if the parameters of the equivalent circuit of a transformer are known, the
efficiency of the transformer under any operating condition m ay be determined. Now,
Pout = V2 I2 cosj
2
Therefore,
h=
h=
V2I2 cosj 2
V2I2 cosj 2 + Pc + I22Req2
V2¢* I¢*cosj
V¢* I¢*cosj
2
* 100
2
*100
(3.17)
(3.18)
+ Pc + I¢2Req1
3.11 Maximum E fficiency
For constant values of the terminal voltage V 2 and load power factor angle
j
2, the maximum
efficiency occurs when:
dh
dI2
=0
(3.19)
If this condition is applied to Eqn. (3.17) the condition for maximum efficiency is:
Pc = I 2Req 2
(3.20)
That is, core loss = copper loss. For full load condition,
Pcu,FL = I22FL Req2
(3.21)
Let x
=
I2
I2,FL
= per unit loading
(3.22)
From Eqns. (3.20), (3.21) and (3.22).
Pc = x2 Pcu, FL
Then, x
=
æ
ç ö Pc
ç
è
÷
÷
(
3)
(
4)
ø
For constant values of the terminal voltage
V2 and load current I 2 , the maximum efficiency
occurs when:
dh
dj
=0
(3.25)
2
Fig.3.17 Efficiency of a transformer.
If this condition is applied to Eq.(3.17), the condition for maximum efficiency is
j 2 = 0 Then, cosj 2 = 1
that is,load power factor = 1
Therefore, maximum efficiency in a transformer occurs when the load power factor is unity
(i.e., resistive load) and load current is such that copper loss equals core loss. The variation of
efficiency with load current and load power factor is shown in Fig.3.17.
Example 3.8 For the transformer in Example 3.4, determine
(a) Efficiency at 75% rated output and 0.6 PF.
(b) Power output at maximum efficiency and the value of maximum efficiency. At what percent
of full load does this m aximum efficiency occur?
Solution:
Pout = V2 I2 cosj 2.
(a)
= 0.75*10000 *0.6 = 4500W Pc
= 100W ,
Pcu = I12Req1
=(0.75 * 4.55)2 *10.4 =121W
h=
4500
*100 = 95.32%
4500 +100 +121
(b) At maximum efficiency
Pcore = Pcu and PF = cosj
2
Now , c re
= 100W = I22Req2 =
Then, I2
æ
=1
c
1/ 2
=ç
100 ö
= 31 A
÷
è0.104ø
Pout h max = V2I2 cos
j
2
= 220 * 31*1 = 6820W
Pout h max
hmax =
Pout h max + Pc + Pcu
=
6820
682
=97.15%
output kVA=6.82 and Rated kVA=10
Then, h mx
a occurs at 68.2% full load.
Anther Method
From Example 3.4 c ,FL
Pu
Then X
æ
=
Pc
= 215W
æ
100ö
ç ö ÷= ç
÷ = 0.68
ç Pu ÷
è c ,FL ø
è215 ø
Example 3.9 Obtain the equivalent circuit of a
8kVA 200/400 V, 50 Hz, 1 phase
transformer from the following test a :- O.C. test : 200 V, 0.8 A, 80W, S.C. test : 20 V,
20 A, 100 W
Calculate the secondary voltage when delivering 6 kW at 0.7 power factor lagging, the primary
voltage being 200 V.
From O.C. Test
Po = Vo I o * cosj
Po
\ cosj o
Then
j
o
80
=
Vo Io 200 *0.8
-1
o = cos 0.5 = 60o
Then Ic1
= Io cosj
o
= 0.5
= 0.8*0.5 = 0.4A
Im1 = Io sin j o = 0.8*0.866 = 0.69282A
Then, Rc1
200
= Vo1 =
= 500 W
Ic1 0.4
And X m1 =
Vo1
200
= 288.675W
=
9282
06
Ic1
From Short Circuit test:
It may be noted that in this test instruments have been placed in the secondary i.e. high
voltage winding and the low voltage winding i.e . primary has been short-circuited.
Now,
Zeq2 =
Also, s
V2sc 20
=
= 1W
I2sc 20
= I2sc Req2
Then, Req2
Then, X eq 2
=
=
100
202
= 0.25W
Z2q2 - Re22 =
Output current I2
12 - 0.252 = 0.968246 W
6000
=
= 21.4286 A
07 * 400
Now, from the aproximate equivalent circuit refeared to secondery :
o
o
V2 Ð0o = 400Ðd
o
V2 Ð0o = V1¢Ðd - I2 Ðj
Then,
o
V2Ð0 = 400Ðd
o
*Zeq2
- 21.4286 Ð - 45.573o *(0.25 + j0.968246)
- 21.43 Ð29.9495o
o
From the above equation we have two unknown variables
V2 and d
it need
two
equations to get both of them. The above equation is a complex one so we can get two equations
out of it. If we equate the real parts together and the equate the imaginary parts:
So from the Imaginary parts:
o
( )- 21.43*sin (29.9495
V2 sin (0) = 400 sin d
o
)
o
( )-10.6986
0 = 400*sin d
Then, d
o
= 1.533o
So from the Real parts:
V2 cos (0) = 400 *cos(1.533o
Then, V2 =
)- 21.43* cos(29.9495
o
)
381.288 V
Example:3.10 A 6kVA, 250/500 V, transformer gave the following test results
short-circuite 20 V ; 12 A, 100 W and Open-circuit test : 250 V, 1 A, 80 W
I. Determine the transformer equivalent circuit.
II. calculate applied voltage, voltage regulation and efficiency when the output is 10 A at 500
volt and 0.8 power factor lagging.
III. Maximum efficiency, at what percent of full load does this maximum efficiency occur? (At
0.8 power factor lagging).
IV. At what percent of full load does the effeciency is 95% at 0.8 power factor lagging.
Solution:
(I) From O.C. Test
Po = Vo Io * cosj
\ cosj o =
o
Po
VoIo
80
= 0.32
=
250 *1.0
j o = cos- 0.32 = 71.3371o
Then Ic = Io cosj o =1.0*0.32 = 0.32A
Im = Io sin j o =1.0*0.7953 = 0.7953 A
1
Then
1
1
Then Rc1
250
= Vo1 =
= 781.25 W
Ic1
0.32
250
= 314.35W
= Vo1 =
0.7953
Im1
And Xm1
As shown in Fig.3.16, these values refer to primary i.e. low-voltage side
From Short Circuit test:
The rated current of the secondary side is:
I2 =
6000
=12 A
500
It is clear that in this test instruments have been placed in the secondary i.e. highvoltage
winding and the low-voltage winding i.e. primary has been short-circuited.
Now,
Zeq2 =
V2sc 20
=
=1.667W
I2sc 12
2
Zeq1 = a 2 * Zeq2 = æç1ö ÷ *1.667 = 0.4167W
è2ø
Also, Psc
= I2c Req2
Then, Req2
Then, Req1
Then,
e1
100
=
122
= 0.694 W
æ 1ö
2
= a2 * Req2 = ç ÷ *0.694 = 0.174 W
è2ø
= Z e2 1 - R e 2 1 =
0.41672 - 0.1742 = 0.3786 W
As shown in the following figure, these values refer to primary i.e. low-voltage side
j0 3786 0.174
V2 ¢
I
781.25
0
V1
314.35
The parameters of series branch can be obtained directly by modifying the short circuit test data
to be referred tothe primary side as following:
SC test 20 V ; 12 A, 100 W (refered to secondery)
SC test 20*a=10V ; 12/a=24A, 100 W (refered to Primary)
Zq
e1
So,
=
V1sc 10
=
= 0.4167W
I1sc 24
= I12c Req1
Also, s
Then, Req1
Then,
e1
=
100
=
242
Zq
e21
= 0.174 W
- Re21 = 0.41672 - 0.1742 = 0.3786 W
It is clear the second method gives the same results easly.
=10*500*0.8 = 4 kVA
(II) Output K VA
Now, from the aproximate equivalent circuit refeared to secondery :
o
V 1 Ðd = V2¢Ð0o + I2¢ Ðj
o
*Zeq1
o
Then,
V1 Ðd = 250Ð 0o + 20 Ð- 36.87o *(0.174 + j0.3786)
VR =
= 257.358Ð0.89o
V1 -V2¢
=
257.358 - 250
Pout = 10*500*0.8 = 4kW ,
*100 = 2.943%
V2
¢
250
Pi = Poc = 80W , and ,
Pcu = 102 * Req 2 = 100*0.694 = 69.4W or
Pcu =
*çç
2
2
I2 ö
Psc
÷
I2SC ø
æ
÷
*
=1ç00 ÷æ10
è12 ø
= 69.4 W
ö
è
h=
ot
Pu
Pout + Pi + Pcu
=
4000
*100 = 96.4%
4000 + 80 + 69.4
(III) maximum effeciency ocures when
Pc =
c
= 80W
the
The percent of the full load at which maximum efficiency occurs is :
Pc
X= ç ö
æ
80
÷
÷ =
ç c ,FL
è Pu ø
= 0.8945%
100
Then, the maximum efficiency is :
h=
6000 * 0.8945 * 0.8
*100 = 96.41%
6000 * 0.8945 * 0.8 + 80 + 80
(IV)
h=
Pout
= 0.95
+ Pi + Pcu
6000*0.8* x
= 0.95
=
2
6000*0.8* x + 80 +100* x
ot
Pu
Then,
95 x2 - 240 x + 76 = 0
Then,
Or
x = 2.155
(Unacceptable)
x = 0.3712
Then to get 95% efficiency at 0.8 power factor the transformer must work at 37.12% of full
load.
3.12 All-Day (Or Energy) Efficiency, had
The transformer in a power plant usually operates near its full capacity and is taken out of
circuit when it is not required. Such transformers are called power transformers, and they are
usually designed for maximum efficiency occurring near the rated output. A transformer
connected to the utility that supplies power to your house and the locality is called a distribution
transformer. Such transformers are connected to the power system for 24 hours a day and operate
well below the rated power output for most of the time. It is therefore desirable to design a
distribution transformer for maximum efficiency occurring at the average output power.
A figure of merit that will be more appropriate to represent the efficiency performance of a
distribution transformer is the "all-day" or "energy" efficiency of the transformer. This is defined
as follows:
had =
had =
energy output over 24 hours
*100
energy input over 24 hours
(3 26)
energy output over 24 hours
energy output over 24 hours + Losses over 24 hours
If the load cycle of the transformer is known, the all day effeciency can be deteremined.
Example 3.11 A 50 kVA, 2400/240 V transformer has a core loss P, = 200 W at rated voltage
and a copper loss Pcu = 500 W at full load. It has the following load cycle.
%Load
0.0%
Power F actor
Hours
6
50%
75%
100%
110%
1
0.8Lag
0.9Lag
1
6
6
3
3
Determine the all-day efficiency of the transformer.
Solution
Energy output 24 hours is
0.5*50*6+0.75*50*0.8*6+1*50*0.9*3+1.1*50*1*3=630
kWh
Energy losses over 24 hours:
Core loss =0.2*24=4.8 kWh
Copper losses = 05 2 *0.5*6 + 0.752 *0.5*6 +12 *0.5*3+1.12 *0.5*3
=5.76 kWh
Total energy loss=4.8+5.76=10.56 kWh
Then, h
AD
630
=
63
0 +10.56
*100 = 98.35%
3.13 Regulation of a Transformer
(1) When a transformer is loaded with a constant primary voltage, then the secondary terminal
voltage drops because of its internal resistance and leakage reactance.
Let. V2o
=Secondary terminal voltage at no-load
= E2 = E 1 / a = V 1 / a
Because at no-load the impedance drop is negligible.
V2 = Secondary terminal
voltage on full-load.
The change in secondary terminal voltage from no-load to full-lead is
= V2o - V2 . This
change divided by 2 is known as regulation down. if this change is divided by
load secondary terminal voltage, then it is called regulation up.
%reg = Vno- load - Vload *100
Vload
%reg =
%reg =
- (V2 )
(V 2 )
no-load
load
(V2 ) load
V1¢-(V2 )
(V2 )
(3.27)
load
load
*100 =
(3.28)
*100
V 1 - ( V 2 ¢)
(V2¢)
load
load
*100
(3.29)
V2
i.e. full-
As the transformer is loaded, the secondary terminal voltage falls (for a lagging power factor).
Hence,
to
keep
the
output
voltage
constant,
prim ary voltage required to maintain rated output voltage from no-load to full-load at a given
power factor expressed as percentage of rated primary voltage gives the regulation of the
tr ansformer.
Vector diagram for the voltage drop in the transformer for different load power factor is
show n in Fig.3.18. It is clear that the only way to get V1 less than V2¢ is when the power factor is
leading which means the load has capacitive reactance (i.e. the drop on
Zeq1
will be negative,
which means the regulation m ay be negative).
V1
j
V2
I2¢ Xeq1
I¢ Zeq1
¢
I¢ Req1
I 2¢
(a)
V1
I2¢ X eq1
I¢ Ze 1
q
I2 ¢
V2
V1
I¢
2
I¢ Req1
¢
I2X
I¢ Ze 1
(b)
eq1
q
j
I¢ Req1
V2 ¢
(c)
Fig.3.18 Vector diagram for transformer for different power factor (a) lagging PF (b) Unity
PF (c) Leading PF.
Example 3.12 A 250/500 V, transformer g Short-circuit test : with lowvoltage winding shorted.
short-circuited
20 V ; 12 A, 100 W
Open-circuit test : 250 V, 1 A, 80 W on low-voltage side.
Determine the circuit constants, insert these on the equivalent circuit diagram and calculate
applied voltage, voltage regulation and efficiency when the output is 5 A at 500 volt and 0.8
power factor lagging.
Solution
Open circuit test
cosj o = Poc
Voc Io c
Ic1 = Io cosj
o
80
= 0.32
250*1
= 1*0.32 = 0.32A
2
Im1 = Io2 - Ic =
12 - 0.322 = 0.95A
V1oc 250
= 781.3 W
Rc1 = I =
c
0.32
Xm1 =
V1oc
250
=
= 263.8 W
Im
0.95
Short circuit test
As the primary is short-circuited, all values refer to secondary winding. So we can obtain e 2
and
Rq X eq2 and then refer them to primary to get Req1 and Xeq1
as explained before in
Example 3.5 or we can modify the short circuit data to the primary and then we can calculate
Req1 and Xeq1 directly. Here will use the two method to compare the results.
First method
Req2
Psc
=
100
2
2 sc
I
Vsc
Zeq2 =
I2sc
Then, Xeq2
As
=
= 0.694 W
122
20
= 12 =1.667 W
Z2q2 - Re22 = 1.6672 - 0.6942 = 1.518 W
=
Rc and Xm
refer to primary, hence we will transfer these values
(Rqe2 , Xeq2 , and Zeq2 ) to primary with the help of transformation ratio.
Then
Req1 = a2 * Req2 = 0.52 * 0.694 = 0.174 W
Xeq1 = a2 * Xeq2 = 0.52 *1.518 = 0.38W
Zeq1 = a2 * Zeq2 = 0.52 *1.667 = 0.417W
Second method
Short-circuited results refeard to secondery are 20 V, 12 A, 100 W Then, Short-circuited results
refeard to primary are 10 V, 24 A, 100 W
Then e 1
Zeq1 =
100
= Psc =
= 0.174 W
2
I1 sc 242
V1sc
10
=
= 0.417 W
I1sc 24
e1 =
Ze21 - Re21 = 04172 - 0.1742 = 0.38 W
Then,
Applied voltage
o
V 1 d = V2 ¢
Then, V1
o
o
0
o
+ I¢ j
d = 250 0
o
V1 d = 250 0o +10
o
* Zq
e1
+10
- cos-1 0 8*(0.174 + j0.38)
-36.24o *0.418 65.4o
o
V1 d
= 250 0o + 4.18
29.16o
o
V1 d = 250 0o + 3.65 + j2.04 = 253.65 + j2.04
= 253.7 04 7o V
Voltage regulation
(V1 )- (V2¢)
load
(V2¢) load
%reg =
(V2¢)
*100
= 250 00
load
253.7 - 250
%reg =
250
*100 =1.48%
f eciency
Ef
h=
h=
V¢* I ¢*cos
j
rn
V¢* I ¢*cosj + Pcu + Pi o *100
25 0*10*0.8
*100 = 95.356%
2
250*10*0.8 +10 *0.174 +80
Example 3.13 A 1f , 10 kVA, 2400/240 V, 60 Hz distribution transformer has the following
characteristics: Core loss at full voltage =100 W and Copper loss at half load =60 W (a)
Determine the efficiency of the transformer when it delivers full load at 0.8 power factor lagging.
(b) Determine the rating at which the transformer efficiency is a maximum. Determine the
efficiency if the load power factor is 0.9. (c) The transformer has the following load cycle:
No load for 6 hours, 70% full load for 10 hours at 0.8 PF and 90% full load for 8 hours at 0.9
PF
Solution:
Pout = 10*0.8 = 8 kW
(a)
Pcore = 100 W , Pcu, FL == 60 * 22 = 240W
8000
h=
*100 = 95.92%
8000 +100 + 240
(b) x
100
=
hmax =
240
= 0.6455``\
10 *10 3 * 0.6455* 0.9
= 96.67%
4
10 * 0.6455* 0.9)+100 +100
(
Output energy in 24 hours is:
E24hrs = 0 +10*0.7*0.8*10 +10*0.9*0.9*8 =120.8kWh
Energy losses in the core in 24 hours is
Ecore =100* 24*10-3 = 2.4kWh
Energy losses in the cupper in 24 hours is
(
Ecu = 240*0.72 *10 + 24 0*0.92 *8)*10-3 = 2.7312kWh
Then, hall day
=
12
120.8 + 2.4 + 2.7312
*100 = 95.93%
3.14 Percentage Resistance, Reactance and Impedance
These quantities are usually measured by the voltage drop at full-load current expressed as a
percentage of the normal voltage of the winding on which calculations are made.
(i) Percentage resistance at full load
I1*Req1
%R =
V1
*100 =
I12Req1
V1 I 1
*100
(3.30)
2
=
I2 Req2
V2 I 2
*100 = %Cu Loss at full load
Percentage reactance at full load:
%X =
%Z =
I2 Xeq2
I 1 * Xeq1
*100 =
*100
V1
V2
I1Zeq1
V1
(3.31)
I2Zeq2
*100 =
%Z = %R2 + % X
V2
*100
(
2)
(3.33)
3.15 Autotransformer
This is a special connection of the transformer from which a variable AC voltage can be
obtained at the secondary. A common winding as shown in Fig.3.19 is mounted on core and the
secondary is taken from a tap on the winding. In contrast to the two-winding transformer
discussed earlier, the primary and secondary of an autotransformer are physically connected .
However, the basic principle of operation is the same as that of the two-winding transformer.
Fig.3.19 Step down autotransformer.
Since all the turns link the same flux in the transformer core,
V1 N1
=
=a
V2 N2
(
4)
If the secondary tapping is replaced by a slider, the output voltage can be varied over the
range0 < V2 < V1.
The ampere-turns provided by the upper half (i.e., by turns between points a and b) are:
æ1
(N1 - N2 )* I1 = ç
è
- 1öN
÷
aø
I1
(
1
5)
The ampere-turns provided by the lower half (i.e., by turns between points b and c) are:
N 2( I 2 - I 1) =
N1
(I2 - I1 )
a
(3.36)
from amper turn balance, from equations (3.35) and (3.36)
ç
æ1 -
è
1 öN I
÷ 1
aø
(3.37)
I1
Then,
1
=
(3.38)
=
N1
a
(I2 - I1)
I2
a
Equations (3.34) and (3.37) indicate that, viewed from the terminals of the autotransformer,
the voltages and currents are related by the sa
The advantages of an autotransformer connection are lower leakage reactances, lower losses,
lower exciting current, increased kVA rating (see Example 3.11), and variable output voltage
when a sliding contact is used for the secondary. The disadvantage is the direct connection
between the primary and secondary sides.
Example 3.14 A 1
f
, 100 kVA, 2000/200 V two-winding transformer is connected as an
autotransformer as shown in Fig.E2.6 such that more than 2000 V is obtained at the secondary.
The portion ab is the 200 V winding, and the portion be is the 2000 V winding. Compute the
kVA rating as an autotransformer.
Fig.3.20
Solution:
The current ratings of the windings are
Therefore, for full-load operation of the autotransformer, the terminal currents are:
A single-phase, 100 kVA, two-winding transformer when connected as an autotransformer
can deliver 1100 kVA. Note that this higher rating of an autotransformer results from the
conductive connection. Not all of the 1100 kVA is transformed by electromagnetic induction.
Also note that the 200 V winding must have sufficient insulation to withstand a voltage of 2200
V to ground.
Example 3.15 A single phase, 50 kVA, 2400/460 V, 50 Hz transformer has an efficiency of
0.95% when it delivers 45kW at 0.9 power factor. This transformer is connected as an
autotransformer to supply load to a 2400 V circuit from 2860 V source.
(a) Show the transformer connection.
(b) Determine the maximum kVA the autotransformer can supply to 2400 V circuit. (c)
Determine the efficiency of the autotransformer for full load at 0.9 power factor.
Solution:
(a)
460
2860
2400
(b) Is,2w
=
50*103
2460
Then, kVA)Auto
(c) h2w
=
Then, Pi
h Auto =
+
= 108.7 A
= 108.782860 = 310.87 kW
50*103 *0.9
= 0.95
3
50 *10 * 0.9 + Pi + Pcu,FL
c ,FL
= 2368.42 W
310870 * 0.9
=99.61 %
310870*0.9 + 2368.42
3.16 Three-Phase Transformers
3.16.1 Introduction
Poweris distributed throughout The world by means of 3-phase transmission lines. In order to
transmit this power efficiently and economically, the voltages must be at appropriate levels.
These levels (13.8 kV to 1000 kV) depend upon the amount of power that has to be transmitted
and the distance it has to be earned. Another aspect is the appropriate voltage levels used in
factories and homes. These are fairly uniform, ranging from 120/240 V single-phase systems to
480 V, 3-phase systems. Clearly, this requires the use of 3-phase transformers to transform the
voltages from one level to another. The transformers may be inherently 3-phase, having three
prim ary windings and three secondary windi result can be achieved by using three single-phase
transformers connected together to form a 3-phase transformer bank.
3.16.2 Basic Properties Of 3-Phase Transformer Banks
When three single-phase transformers are used to transform a 3-phase voltage, the windings
can be connected in several ways. Thus, the primaries may be connected in delta and the
secondaries in wye, or vice versa. As a result, the ratio of the 3-phase input voltage to the 3-phase
output voltage depends not only upon the turns ratio of the transformers, but also upon how they
ar e connected.
A 3-phase transformer bank can also produce a phase shift between the 3-phase input voltage
and the 3-phase output voltage. The amount of phase shift depends again upon the turns ratio of
the transformers, and on how the primaries and secondaries are interconnected. Furthermore, the
phaseshift feature enables us to change the number of phases. Thus, a 3-phase system can be
converted into a 2-phase, a 6-phase, or a 12-phase system. Indeed, if there were a practical
application for it, we could even convert a 3-phase system into a 5-phase system by an
appropriate choice of single-phase transformers and interconnections.
In making the various connections, it is important to observe transformer polarities. An error
in polarity may produce a short-circuit or unbalance the line voltages and currents.
The basic behavior of balanced 3-phase transformer banks can be understood by making the
following simplifying assumptions:
1.The exciting currents are negligible.
2.The transformer impedances, due to the resistance and leakage reactance of the windings, ar
e negligible.
3.The total apparent input power to the transformer bank is equal to the total apparent output
power.
Furthermore, when single-phase transformers are connected into a 3-phase system, they retain
l their basic single-phase properties, such as current ratio, voltage ratio, and flux in the core.
al
Given
the polarity marks
X1, X2 and H1 , H2 , the phase shift between primary and
secondary is zero.
3.16.3 Delta-Delta Connection
The three single-phase transformers P, Q, and R of Fig.3.21 transform the voltage of the
incoming transmission line A, B, C to a level appropriate for the outgoing transmission line 1, 2,
3. The incoming line is connected to the source, and the outgoing line is connected to the load.
The transformers are connected in delta-delta. Terminal H1 of each transformer is connected to
terminal
H2
the next transformer. Sof
transformers are connected together. The actual physical layout of the transformers is shown in
Fig.3.21. The corresponding schematic diagram is given in Fig.3.22. The schematic diagram is
draw n in such a way to show not only the connections, but also the phasor relationship between
the primary and secondary voltages. Thus, each secondary winding is drawn parallel to the
corresponding primary winding to which it is coupled. Furthermore, if source G produces
voltages EAB
, EBC ,
C
according to the indicated phasor diagram, the primary windings are
oriented the same way, phase by phase. For example, the primary of transformer P between lines
A and B is oriented horizontally, in the same direction as phasor A .
Fig.3.21 Delta-delta connection of three single-phase transformers. The incoming lines
(source) are A, B, C and the outgoing lines (load) are 1, 2, 3.
Fig.3.22 Schematic diagram of a delta-delta connection and associated phasor diagram.
In such a delta-delta connection, the voltages between the respective incoming and outgoing
transmission lines are in phase. If a balance currents are equal in magnitude. This produces
balanced line currents in the incoming lines A-B-C. As in any delta connection, the line
currents are 43 times greater than the respective currents IP and
IS flowing in the primary and
secondary windings (Fig.3.22). The power rating of the transformer bank is three times the rating
of a single transformer.
Note that although the transformer bank constitutes a 3-phase arrangement, each transformer,
considered alone, acts as if it were placed in a singlephase circuit. Thus, a current IP flowing
from H1 H2 in the primary winding is associated with a current IS flowing from X2
to X1 in
the secondary.
Example 3.16 Three single-phase transformers are connected in delta-delta to step down a
line voltage of 138 kV to 4160 V to su-pply power to a manufacturing plant. The plant draws 21
MW at a lagging power factor of 86 percent.
Calculate a. The apparent power drawn by the plant b. The apparent power furnished by the
HV line
c.The current in the HV lines d. The current in the LV lines e. The currents in the primary and
secondary windings of each transformerf. The load carried by each transformer
Solution:
a The appearent power drawn by the plant is:
S = P / cosj
= 21/0.86 = 24.4 MVA
b. The transformer bank itself absorbs a negligible amount of active and reactive power
because the I
2
R
losses and the reactive power associated with the mutual flux and the leakage
fluxes are small. It follows that the apparent power furnished by the HV line is also 24.4 MVA.
c.The current in each HV line is:-
I1=
S
3 *V1
24.4 *106
=
3 *13800
=102 A
d.The current in the LV lines is:-
I2 =
S
24.4*106
=
= 3386 A
3V2
3 *4160
e Referring to Fig.3.19, the current in each primary winding is: I
p
The current in each secondary winding is:
IS =
=
102
= 58.9 A
3386
=1955 A
3
f. Because the plant load is balanced, each transformer carries one-third of the total load, or
24. / = 8.13 MVA.
The individual transformer load can also be obtained by multiplying the primary voltage times
the primary current:
S = Ep I
p
=138000*58.9 = 8.13MVA
Note that we can calculate the line currents and the currents in the transformer windings even
though we do not know how the 3-phase load is connected. In effect, the plant load (shown as a
box in Fig.3.22) is composed of hundreds of individual loads, some of which are connected in
delta, others in wye. Furthermore, some are single-phase loads operating at much lower voltages
than 4160 V, powered by smaller transformers located inside the plant. The sum total of these
loads usually results in a reasonably well-balanced 3-phase load, represented by the box.
3.16.4 Delta-wye connection
When the transformers are connected in delta-wye, the three primary windings are connected
the same way as in Fig.3.21. However, the secondary windings are connected so that all the
X2
terminals are joined together, creating a common neutral N (Fig.3.23). In such a delta-wye
connection, the voltage across each primary winding is equal to the incoming line voltage.
However, the outgoing line voltage is 3 times the secondary voltage across each transformer.
The relative values of the currents in the transformer windings and transmission lines are
given in Fig.3.24. Thus, the line currents in phases A, B, and C are
3 times the currents in the
primary windings. The line currents in phases 1, 2, 3 are the same as the currents in the
secondary windings. A delta-wye connection produces a 30 phase shift between the line voltages
of the incoming and outgoing transmission lines. Thus, outgoing line voltage
ahead of incoming line voltage
1
is 30 degrees
, as can be seen from the phasor diagram. If the outgoing line
E2
feeds an isolated group of loads, the phase shift creates no problem. But, if the outgoing line has
EB
to be connected in parallel with a line coming from another source, the 30 degrees shift may
A
make such a parallel connection impossible, even if the line voltages are otherwise identical.
One of the important advantages of the wye connection is that it reduces the amount of
insulation needed inside thetransformer. The
58 percent of the line voltage.
Fig.3.23 Delta-wye connection of three single-phase transformers.
Fig.3.24 Schematic diagram of a delta-wye connection and associated phasor diagram. (The
phasor diagrams on the primary and secondary sides are not drawn to the same scale.)
Example3.17 Three single-phase step-up transformers rated at 90 MVA, 13.2 kV/80 kV are
connected in delta-wye on a 13.2 kV transmission line (Fig.3.25). If they feed a 90 MVA load,
calculatethe following:
a.The secondaryline voltage
c.The incoming and outgoing transmission line currents
b.The currents in the transformer windings
Fig.3.25.
Solution
The easiest way to solve this problem is to consider the windings of only one transformer, say,
transformer P.
a. The voltage across the primary winding is obviously 13.2 kV
The voltage across the secondary is, therefore, 80 kV.
The voltage between the outgoing lines 1, 2, and 3 is:
V2 = 80* 3 =139kV
b . The load carried by each transformer is
=90 / 3 = 30MVA
3.16.5 Wye-delta connection
S
The currents and voltages in a wye-delta connection are identical to those in the delta-wye
connection. The primary and secondary conn
neutral, and the
H2
terminals are connected together to create a
X1, X2 terminals are connected in delta. Again, there results a 30 degrees
phase shift between the voltages of the incoming and outgoing lines.
3.16.6 Wye-wye connection
When transformers are connected in wye-wye, special precautions have to be taken to prevent
severe distortion of the line-to-neutral voltages. One way to prevent the distortion is to connect
the neutral of the primary to the neutral of the source, usually by way of the ground (Fig.3.26).
Another way is to provide each transformer with a third winding, called tertiary winding. The
tertiary windings of the three transformers are connected in delta (Fig.3.27). They often provide
the substation service voltage where the transformers are installed.
Note that there is no phase shift between the incoming and outgoing transmission line
voltages of a wye-wye connected transformer.
Fig.3.26 Wye-wye connection with neutral of the primary connected to the neutral of the
source.
Fig.3.27 Wye-wye connection using a tertiary winding.
Example 3.18 Three single phase, 30 kVA, 2400/240 V, 50 Hz transformers are connected to
form 3 j , 2400/416 V transformer bank. The equivalent impedance of each transformer referred
to the high voltage side is 1.5+j2 S2. The transformer delivers 60 kW at 0.75 power factor
(leading).
(a) Draw schematic diagram showing the transformer connection.
(b) Determine the transformer wiWing current
(c) Determine the primary voltage.
(d) Determine the voltage regulation.
Solution:
(a)
(b) kVA
Is =
=
60
= 80kVA
0.75
80*103
=111.029 A
3 *416
2400
a=
= 10
240
I1ph =
111.029
=11.103A
10
I1L =11.103* 3 =19.231 A
V2¢ = 2400Ð0o V , I 2¢ =11.103Ð41.41o A
V1 = V2¢+ I¢*(Zeq1)
o
= 2400Ð0 +11.103Ð41.41o *( 1.5 + j2) = 2397.96Ð0.66 V
V 1 -V 2 ¢
VR =
*100
V2 ¢
2397.96 - 2400
*100 = -0.0875%
=
2400
Problems:
1
A 1 0, 100 kVA, 1000/ 100 V transf test 100 V, 6.0 A, 400 W short-circuit test 50 V,
100 A, 1800 W
(a) Determine the rated voltage and rated current for the HV and LV sides.
(b ) Derive an approximate equivalent circuit referred to the HV side.
(c) Determine the voltage regulation at full load, 0.6 PF leading.
(d) Draw the phasor diagram for condition (c).
2
A 1 ¢,25 kVA, 220/440 V, 60 Hz transformer gave the following test results.
Open circuit test
: 220 V, 9.5 A, 650 W Short-circuit test
: 37.5 V, 55 A, 950 W (a )
Derive the approximate equivalent circuit in per-unit values. (b) Determine the voltage
regulation at full load, 0.8 PF lagging. (c) Draw the phasor diagram for condition (b).
3
A1f
10 kVA, 2400/ 120 V, 60 Hz transformer has the following equivalent circuit
parameters:
Zeq1 = 5 + j25 W, c = 64 kW and m = 9.6 kW Standard no-load and shortR1
X1
circuit tests are performed on this transformer. Determine the following:
No-load test results: Voc
4-
, Ioc ,
o
Sh r -circuit test results:
Vsc , Isc , Psc
A single-phase, 250 kVA, 11 kV/2.2 kV, 60 Hz transformer has the following
parameters. R
H=
V 1.3 W XHV=4.5W, RLV = 0.05 W, XLV = 0.16, Rc2= 2.4 kW Xm2 = 0.8 kW
(a) Draw the approximate equivalent circuit (i.e., magnetizing branch, with Rc1 and Xm
connected to the supply terminals) referred to the HV side and show the parameter values.
(b) Determine the no load current in amperes (HV side) as well as in per unit.
(c) If the low-voltage winding terminals are shorted, determine
i
()
(ii)
(d)
The supply voltage required to pass rated current through the shorted winding.
The losses in the transformer.
The HV winding of the transformer is connected to the 11 kV supply and a load,
ZL = 15Ð - 90o Wis connected to the low voltage winding. Determine:
(i)
Load voltage. (ii) Voltage regulation.
5
A 1-f , 10 kVA, 2400/240 V, 60 Hz distribution transformer has the following
characteristics: Core loss at full voltage = 100 W Copper loss at half load = 60 W
(a)
Determine the efficiency of the transformer when it delivers full load at 0.8 power factor
lagging. (b) Determine the per unit rating at which the transformer efficiency is a maximum.
Determine this efficiency if the load power factor is 0.9. The transformer has the following load
cycle: No load for 6 hours 70% full load for PF Determine the all-day efficiency of the
transformer.
6
The transformer of Problem 5 is to be used as an autotransformer (a)
connection that will result in maximum kVA rating. (b)
high-voltage and low-voltage sides. (c)
Show
the
Determine the voltage ratings of the
Determine the kVA rating of the autotransformer.
Calculate for both high-voltage and low-voltage sides.
7
A1
f
, 10 kVA, 460/ 120 V, 60 Hz transformer has an efficiency of 96% when it
delivers 9 kW at 0.9 power factor. This transformer is connected as an
autotransformer to supply load to a 460 V circuit from a 580 V source.
(a)
Show the autotransformer connection.
(b)
Determine the maximum kVA the autotransformer can supply to the 460 V circuit.
(c)
Determine the efficiency of the autotransformer for full load at 0.9 power factor.
8
Reconnect the windings of a 1f , 3 kVA, 240/120 V, 60 Hz transformer so that it can
supply a load at 330 V from a 110 V supply. (a) Show the connection.
(b) Determine the maximum kVA the reconnectedtransformer can deliver.
9
Three 1¢, 10 kVA, 460/120 V, 60 Hz transformers are connected to form a 3f 460/208
V transformer bank. The equivalent impedance of each transformer referred to the high-voltage
side is 1.0 + j2.0 W. The transformer delivers 20 kW at 0.8 power factor (leading).
(a) Draw a schematic diagram showing the transformer connection. (b) Determine the
transformer winding current. (c) Determine the primary voltage. (d) Determine the voltage
regulation.
10
A 1f
200 kVA, 2100/210 V, 60 Hz transformer has the following characteristics. The
impedance of the high-voltage winding is 0.25 + j 1.5 W with the lowvoltage winding
short-circuited. The admittance (i.e., inverse of impedance) of the low-voltage winding is 0.025
- j O.075 mhos with the high-voltage winding open-circuited.
(a)
Taking the transformer rating as base, determine the base values of power, voltage,
current, and impedance for both the high-voltage and low-voltage sides of the transformer.
(b)
Determine the per-unit value of the equivalent resistance and leakage reactance of the
transformer. (c)
(d)
Determine the per-unit value of the excitation current at rated voltage.
Determine the per-unit value of the total power loss in the transformer at full-load output
condition.
UNIT III
ELECTROMECHAN Introduction
Electromechanical energy conversions - use a magnetic field as the medium of energy
conversion.Electromechanical energy conversion device:
Converts electrical energy into mechanical energy
or
Converts mechanical energy into electrical energy
Three categories of electrom echanical energy conversion devices:
Transducers (for measurement and control)- small motion
Transform the signals of different forms. Examples: microphones, sensors and speakers.
F
- limited mechanical motion.
Produce forces mostly for linear motion drives, Example Actuators - relays, solenoids
and electromagnets.
Continuous energy conversion equipment.
Operate in rotating mode. Examples: motors and generators.
Energy Conversion Process
The principle of conservation of energy:
Energy can neither be created nor destroyed. It can only be changed from one form to
another. Therefore total energy in a system is constant .
An electromechanical converter system has three essential parts:
① An electrical system (electric circuits such as windings)
② A magnetic system (magnetic field in the magnetic cores and air gaps)
③ A mechanical system (mechanically movable parts such as a rotor in an electrical
machine).
The energy transfer equation is as follows:
æElectrical
ö æ Mechanicaö æIncrease in
ç
÷ ç
çenergy input ÷ =çenergy
çfrom sources÷ çoutput
è
ø è
÷ ç
÷ çstored energy in ÷
÷ çmagnetic field
÷
ø è
ö
÷ æEnergy ö
+ç
÷
èlosses ø
ø
The energy balance can therefore be written as:
æ Electricalenergy ö æ
ç
p
÷ ç
t
Mechanicalenergy ö
Increasein
æ
÷
ö
÷
ç
stored field ÷
çin u fromsources÷ = çoutput + friction ÷ ç+ nr
÷ çe e gy +coreloss÷
ç
÷ çandwindageloss
è- resis tan celoss ø è
ø è
ø
For the lossless magnetic energy storage system in differential form,
dWe = dWm + dWf
dWe = i d l = differential change in electric energy input
dWm = fm dx = differential change in mechanical energy output
dWf = differential change in magnetic stored energy
Energy in Magnetic System
Consider the electromechanical system below:
Axial length (perpendicular to page) = l
The m echanical force fm is defined as acting from the relay upon the external mechanical system
and the differential mechanical energy output of the relay is
dWm = fm dx
Then, substitution dWe = id l , gives
dWf = id l - fm dx
Value of W f is uniquely specified by the values of l and x, since the magnetic energy storage
system is lossless.
Wf = òidl
dWf = differential change in magnetic stored energy
Energy and C oenergy
The l-i characteristics of an electromagnetic system depends on the air-gap length and B-H
characteristics of the magnetic material.
For a larger air-gap length the characteristic is essentially linear. The characteristic becomes non
linear as the air-gap length decreases.
l
l
l-i
Wf
Increased
i -gap
ar
length
Wf’
i
i
For a particular value of air-gap length, the field energy is represented by the red area between l
axis and l-i characteristic. The blue area between i axis and l - i characteristic is known as the
coenergy
Wf' = ò
di
- i characteristic,
The coenergy is defined as
From the figure of l
Wf’ + Wf = l i
l
Note that Wf’ > Wf if the l - i characteristic i
The quantity of coenergy has no physical significance. However, it can be used to derive
expressions for force (torque) developed in an electromagnetic system
Determination of Force from Energy
The magnetic stored energy W f is a state function, determined uniquely by the independent state
variables λ and x. This is shown explicitly by
dWf (λ, x) = id l - fm dx
For any function of two independent variables F(x1,x2),the total differential equation of F with
respect to the two state variables x1 and x2 can be written
¶F(x1, x2)
¶F(x1, x2)
dx1 +
dx2
¶
x
¶x1
2
x
x
dF(x1, x2) =
2
1
Therefore, for the total differential of Wf
¶Wf (l , x)
dWf (l , x)
¶l
dl
+
¶Wf (l ,
x)
dx
l
And we know that
dWf (l , x) = idl
- fmd x
By matching both equations, the current:
i=
¶Wf (l , x)
¶l
x
where the partial derivative is taken while holding x constant and the mechanical force:
fm = -
¶Wf (l , x)
¶x
l
Where the partial derivative is taken while holding l constant.
Determination of Force from Energy: Linear System
For a linear magnetic system for which l =L(x)i:
l
Wf (l , x) = òi
0
l
( ,
l
x)dl =ò
0
l
l
L(x)
dl
1
2 L(x)
and the force, fm can be found directly:
fm = -
¶Wf (l , x)
¶x
¶æ 1
l
l2 ö
÷
l
2
dL(x)
=
=- ç
2L(x)2
¶x ç 2 L(x) ø÷
è
l
Determination of Torque from Energy
For a system with a rotating mechanical terminal, the mechanical terminal variables become the
angular displacement θ and thetorque T. Therefore, equation for the torque:
T=-
¶Wf (l ,q )
¶q
l
where the partial derivative is taken while holding
Determination of Force from Coenergy
The coenergy Wf’ is defined as
Wf' (i, x) = il -Wf (l , x)
and the differential coenergy dWf’:
'
dW
f
(i, x) = d(il ) - dWf (l , x)
We know previously that
dWf (l , x) =idl
- fm dx
By expanding d(iλ):
d (il ) = idl + ldi
So, the differential coenergy dWf’:
dWf' (i, x) = d(il ) - dWf (l , x) =
idl + ldi - (idl
- fmdx) = ldi
+ fm d x
By expanding dWf’(i,x):
dWf ' (i, x) =
¶Wf ' (i, x)
¶Wf ' (i, x)
di +
dx
¶i
¶x i
x
and, from the previous result:
dWf' (i, x) = ldi + fmd x
l
constant.
By matching both equations, l :
l=
¶Wf ' (i, x)
¶i
x
where the partial derivative is taken while holding x constant and the mechanical force:
fm =
¶Wf ' (i, x)
¶x
i
where the partial derivative is taken while holding i constant.
For a linear magnetic system for which l =L(x)i:
i
Wf (i, x) =
=L(x)
'
i
x)di =òl(i, òL(x)idi
0
i2
2
0
and the force, fm can be found directly:
fm =
¶Wf ' (i, x)
¶x
=
i
2
¶ æ
i ö÷ = i dL(x)
çL(x)
¶x ç
÷
è
2ø
2 dx
2
i
For a system with a rotating mechanical terminal, the mechanical terminal variables become the
angular displacement θ and thetorque T. Therefore, equation for the torque:
T=
¶Wf ' (i,q )
¶q
i
where the partial derivative is taken while holding l constant.
Determination of Force Using Energy or Coenergy?
The selection of energy or coenergy as the function to find the force is purely a matter of
convenience.
They both give the same result, but one or the other may be simpler analytically, depending on
the desired result and characteristics of the system being analyzed.
Direction of Force Developed
1 By using energy function: f = m
¶Wf (l ,
l
x)
The negative sign shows that the force acts in a direction to decrease the magnetic field stored
energy at constant flux.
2 By using coenergy function: fm = +
¶Wf ' (i, x)
¶x
The positive sign emphasizes that the force acts in a direction to increase the coenergy at
constant current.
3 By using inductance function:
i2 dL(x)
2 dx
fm = +
i
The positive sign emphasizes that the force acts in a direction to increase the inductance at
constant current.
B-H Curve and Energy Density
In a magnetic circuit having a substantial air gap g, and high permeability of the iron core, nearly
all the stored energy resides in the gap. Therefore, in most of the cases we just need to consider the
energy stored in the gap. The magnetic stored energy,
l
Wf =
ò0
idl
in which i =
Hg
N
and
Hg
B
Therefore, Wf =
ò
dl = d ( Nf ) = d ( NAB) = NAdB
0
N
NAdB = Ag
B
ò
HdB
0
However, Ag is volume of the air gap. Dividing both sides of the above equation by the volume
Ag results in
wf =
Wf
B
=
Ag
HdB
ò
0
B
Where i wf = ò 0 HdB s energy per unit volume
wf is known as energy density.
The area between the B-H curve and B axis represents the
energy density in the air gap.
In the same manner,
H
w'f = ò 0 BdH is coenergy per unit volume.
The area between the B-H curve and H axis represents the
coenergy density in the air gap.
For a linear magnetic circuit, B = mH or H = B/m, energy density:
B
B2
dB =
m
2m
wf = ò HdB = ò
0
0
and coenergy density:
H
H
0
0
w'f = òBdH = òmHdH
=
mH
2
2
In this case, it is obvious that wf = wf’.
Doubly-excited Systems
Rotating Machines
Most of the energy converters, particularly the higher-power ones, produce rotational
motion.
The essential part of a rotating electromagnetic system is shown in the figure.
The fixed part is called the stator,
the moving part is called the rotor.
The rotor is mounted on a shaft and is free to rotate between the poles of the stator
Let consider general case where both stator & rotor have windings carrying current ( i s
and ir )
Assume general case, both stator and rotor have winding carrying currents (non-uniform
air gap - silent pole rotor)
The system stored field energy, W f can be evaluated by establishing the stator current i s
and rotor current ir and let system static, i.e. no mechanical output
S
otor flux linkage l is expressed in terms of inductances L (which depends on
position rotor angle q, L(q)
Stored field energy
Torque
In linear system, coenergy = energy W’f = W f
First two terms represents reluctance tsalient stator and rotor, or in either stator or rotor is
salient)
The third term represents alignment torque; variation of mutual inductance.
Reluctance Torque - It is caused by the tendency of the induced pole to align with
excited pole such that the minimum reluctance is produced. At least one or both of the
winding must be excited.
Alignment Torque - It is caused by a tendency of the excited rotor to align with excited
stator so as to maximize the mutual inductance. Both winding must be excited.
Forces and Torques
Lorentz force law
F = q(E + v ´ B)
F: N, q: Coulombs, E : V/m, B : T or Wb/m 2
large numbers of charged particles are in motion,
Fv = r (E + v ´ B)
Current density, J = r v
Fv: force density (force per unit volume), N/m 3
r : charge density (C/m3)
A/m2
Right-hand rule for determining the direction magnetic-field component of the Lorentz force F = q(v × B).
Example 3.1
A nonmagnetic rotor containing a single-turn coil is placed in a uniform magnetic field of magnitude B0, as
shown in Fig. 3.2. The coil sides are at radius R and the wire carries current I as indicated. Find the θdirected torque as a function of rotor position α when I = 10 A, B0 = 0.02 T and R = 0.05 m. Assume that
the rotor is of length l = 0.3 m.
Force per unit length of the wire, F = I × B
For wire 1 carrying current I into the paper,
F1q = -I B0 lsina
For wire 2 carrying current I out of the paper,
F2q = -I B0 lsina
Torque, T = F1q R + F2q R = -2I B0 l R sina = -2(10)(0.02)(0.05)(0.3)sin a = -0.006sina N.m
magnetic-field electromechanical-energy-conversion device
simple force-producing device
The energy method,
Pin(electrical) = Pstored (magnetic field) +Pout (mechanical)
ei =
dWfld
´dt
dt
+
Þ
d
dt
( f x)
e=
fd
l
dWlf d = i dl
lossless system
dl
dt
- f dxfld
Energy Balance
æ energy
input ö
çf rm
o electric÷
ç
ç
è
æ
ç
=
÷ ç
÷ ç
sources
ø è
mechanical ö
÷
energy
output
æ
increase in energyö
æ
energy ö
÷ çconverted ÷
ç
+
÷ ç
÷ ç
ø è
stored in
+
÷ ç
÷ ç
÷
÷
magnetic field ø è into heat ø
Conversion of energy into heat: ohmic heating due to current flow in windings + mechanical friction
Lossless magnetic energy storage system:
dWelce = dWmehc
fd
+ dW l dWelec : differential electric energy input
dWmehc : differential mechanical energy output
dW fdl : differential change in stored energy
Singly Excited Systems
An electromagnetic relay
dWelec = ei dt
dl
dt
e =
Þ
dWelec = i d
l
dWmech = f dx l
Þ
d
Wlf d = i d
l
-
f dx
fld
fd
Lossless magnetic energy storage system: conservative system: value of W l is uniquely specified by the
values of λ and x (λ, x are called the state variables)
Þ
fd
Wfdl is uniquely specified by λ and x
Two different integration paths for
fd
Wl
fd
ò dW l + ò dW l
=
path 2a
Wl
On 2a: dl = 0, and f
path 2b
fd
fld
fd
= 0 since l = 0
On 2b: dx = 0
For a linear system (λ proportional to i): l = L(x)i
Þ
dWl
fd
ü
=0ý Þ
Wfld
þ
l0
(l 0, x0 ) = òi(l, x0)dl
0
l
i(l¢,
W lfd (l , x) = ò
l
x) d l
l¢
=
0
¢
0
l
1
òd l ¢
L(x)
2
2 L(x)
Example 3.2
The relay shown in Fig.3.6a is made from infinitely-permeable magnetic material with a movable
plunger, also of infinitely-permeable material. The height of the plunger is much greater than the air-gap
length(h >> g). Calculate the magnetic stored energy W l as a function of plunger position (0 < x < d) for N
= 1000 turns, g = 2.0 mm, d = 0.15 m, l = 0.1 m, and i = 10 A.
fd
1
W l = L( x)i2
2
m0N 2A a
L(x) =
Agap : gap cross-sectional area
2g
gp
fd
Agap = l(d - x) = ld
Wl =
æ1
ç
è
2
-xö
Þ
÷
dø
L(x) =
m0N ld (1- x / d )
2g
1 (10002)(4p ´10-7)(0.1)(0.15)
´ 10 ç
2
2(0.002)
è
xö
÷=
dø
ç
è
236 1-
xö
÷ J
d ø
fd
Relay with movable plunger
Magnetic Force and Torque from Energy
Wfld is a state function determined uniquely by the values of the independent state variables λ and x.
dW l = i dl
-f
dxfld
For any function of two independentfdvariables F(x1, x2),
dF(x1, x2) =
¶F
¶F
dx1 +
dx2
¶x
¶x2
Þ
dWlf d =
i=
d
dl +
¶l
1
Þ
¶Wlf
¶Wfdl (l, x)
f
¶l
=-
l
¶Wlf
d
dx
¶x
¶Wfdl (l, x)
¶x
fd
For linear magnetic systems for which λ = L(x)i,
f
Example 3.3
fld
=-
¶ æ1
ç
l
2
ö
÷=
¶x è 2 L(x) ø
l
dL(x)
2
2
2[L(x)]
dx
l = L(x)i
Þ
f
fld
1 dL(x)
= i2
2
dx
Table 3.1 contains data from an experiment in which the inductance of a solenoid was measured as a
function of position x, where x = 0 corresponds to
Table 3.1
x (cm)
0
0.2
0.4
0.6
0.8
1.0
L(mH)
2.8
2.26
1.78
1.52
1.34
1.26
1.2
1.20
1.4
1.16
1.6
1.13
1.8
1.11
2.0
1.10
Plot the solenoid force as a function of position for a current of 0.75 A over the range 0.2 < x < 1.8 cm.
Using the MATLAB function polyfit, a fourth-order polynomial fit of the inductance as a function of x is
obtained:
L( x) = a(1)x4 + a(2) x3 + a(3)x2 + a(4) x + a(5)
Þ
f
fd
l
1 dL(x) 1
= i2
= i é4a(1)x3 + 3a(2)x2 + 2a(3)x + a(4)û ù
2
dx
2
2
MATLAB script:
clc
clear
% Here is the data: x in cm, L in mH
xdata = [0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0];
Ldata = [2.8 2.26 1.78 1.52 1.34 1.26 1.20 1.16 1.13 1.11 1.10];
%Convert to SI units
x = xdata*1.e-2 ;
L = Ldata*1.e-3;
len = length(x) ;
xmax = x(len) ;
% Use polyfit to perform a 4'th order fit of L to x. Store
% the polynomial coefficients in vector a. The fit will be
% of the form:
%
% Lfit : a(1)*x^4 + a(2)*x^3 + a(3)*x^2 + a(4)*x + a(5) ;
%
a = polyfit(x,L,4) ;
% Let's check the fit
for n = 1:101
xfit(n) = xmax*(n-1)/100;
Lfit(n) = a(1)*xfit(n)^4 + a(2)*xfit(n)^3 + a(3)*xfit(n)^2 ...
+ a(4)*xfit(n) + a(5);
end
% Plot the data and then the fit to compare (convert xfit to cm and Lfit to mH)
figure(1)
plot (xdata, Ldata, ' * ' )
hold
plot (xfit*100, Lfit*1000)
xlabel('x [cm] ')
ylabel('L [mH] ')
% Now plot the force. The force will be given by
%
% (1/2)i^2 dL/dx =(1/2) i^2 ( 4*a(1)*x^3 + 3*a(2)*x^2 + 2*a(3)*x + a(4))
%
%Set current to 0.75 A
I = 0.75;
for n = 1:101
xfit(n) = 0.002 + 0.016*(n-1)/100;
F(n) =4*a(1)*xfit(n)^3+3*a(2)*xfit(n)^2+2*a(3)*xfit(n)+a(4);
F(n) = (I^2/2)*F(n);
end
figure(2)
plot (xfit*100,F)
xlabel('x [cm] ')
ylabel('Force [N]')
System with rotating mechanical terminal: x ® q : angular displacement, f
dWlf d (l ,q ) = i dl-Tfld dq
Linear magnetic systems: l = L(q )i
Þ
Tlf d = -
¶ æ1
l
2
W lfd =
l
1
ö
ç
÷=
¶q è 2 L(q ) ø
Þ
1
2
[L(q ]
® Tlfd torque
¶Wfdl (l,q )
¶q
l
2
2 L(q
dL(q
2
Tfld = -
fld
)
l = L(q )i
Þ
1
dL(q
Tfld = i2 )
2
Example 3.4
The magnetic circuit of Fig. 3.9 consists of a single-coil stator and an oval rotor. Because the air-gap is
nonuniform, the coil inductance varies with rotor angular position, measured between the magnetic axis
of the stator coil and the major axis of the rotor, as
L(q ) = L0 + L 2 cos(2q )
L0 = 10.6 mH L2 = 2.7 mH
Find the torque as a function of θ for a coil current of 2 A.
Solution:
2
1 dL(q )
Tfdl = i2
2
dq
1
= i2 (-2L2sin(2q ) )= -4 ´ 2.7 ´10-3 sin(2q ) = -1.08´10-2 sin(2q ) N.m
Magnetic Force and Torque from Coenergy
l
W fd¢ -Wfdl(i, ) = il
The coenergy W ¢ is defined as:
l
fld
l
dWf¢l d(i,l ) = d(il ) - dWfld (i,l )
d(il ) = idl + ldi
dW lfd = i dl - f dx
fld
Þ
dWfd¢l = idl + ldi - (i dl
- f dx) = ldi + f dx
fld
fld
¶ f
¶Wf ¢ld
dWf¢d (i, x) = d¢Wl di +
dx
¶x
¶i
¶Wf¢l (i, x)
fd
l=
fl = ¶
¶i
The coenergy can be found fromthe integral of λ di
i
òl(i¢, x)di
W ¢fdl (i, x) =
0
For linear magnetic systems, l = L( x)i
W ¢fdl (i, x) = 1L(x)i2
2
Þ
f
fl
d
=
¶Wfld (i, x) 1 dL( x)
= i2
¶x
2
dx
For a rotating electromechanical system,
i
W ¢fd(i,q ) =
òl(i¢,q )di
0
¢
¢
Magnetically linear system,
Tf dl =
¶Wfdl (i,q )
¶q
W ¢fdl (i,q ) = L(q )i2
1
Tfl d =
¶Wfld (i,q ) 1 dL(q
= i2
¶q
2 )
Example 3.5
For the relay of Example 3.2, find the force on the plunger as a function of x when the coil is driven by a
controller which produces a current as a function of x of the form
i(x) = I æç x ÷
èdø
ö
A
0
From Example 3.2,
L(x) =
m0N2ld (1- x / d )
2g
1 dL( x)
1 æ m0N 2l ö
f fdl = i2
2
=- i ç
dx
2 è 2g ø
The coenergy for this system is
I2m0N2l æx ö
÷=
2
1
1
Wfld (i, x) = L( x)i2 = i2
2
2
m0N2ld(1- x / d )
2g
-
4g
=
2
ç ÷
èd ø
m0N2ld(1- x / d ) æxö
ç ÷
èd ø
4g
The force cannot be found by taking the partial derivative of this expression for W
respect to x, because in the expression for
differentiating with respect to x.
fd
¢
l
(i, x) with
f fdl the current must be kept constant while
For a magnetically-linear system, the energy and coenergy are numerically equal: 1l2 / L = 1 Li2 . For a
2
2
nonlinear system in which x and i or B and H equal.
Hag = 2 g
(a)
fd
2
l = Nf = NBag Aag = NAgam0Hag = m0NAag
m0N
Þ
L=
Ni m0N Aag
=
i
2g
2
a
g
A
2g
1 öq.h
Aag = çr1 + g ÷
2 ø
è
æ
Þ
m0N
L(q ) =
2g
2
1 öh.
çr1 + g ÷ q
æ
2 ø
è
1 dL(q ) m0N2i2 æ
1 öh
=
çr 1 + g ÷
Tlf d = i2
2
dq
4g è
2 ø
(b)
Þ
Bmax = 1.65 T
Þ
Hm ax =
Bmax = Ni
2g
m0
2 ´ 3´ 10-3 ´1.65
Ni = 2g Bmax =
= 7878.2 A-turns
4p ´ 10-7
m0
Maximum torque,
2
T lfd = m0N i2 æçr1 + 1g öh 4p ´10-7 ´ (7878.2)2 (0.025 + 0.0015)0.018 = 3.1 N-m
÷ =
4g è
4 ´ 0.003
2 ø
Multiply-Excited Magnetic Field Systems
Differential energy
dWlf d (l 1,l 2,q ) = i1 dl1 + i2 dl 2 - Tfld dq
Þ
Tfld = -
¶Wf (l1,l2,q )
dl
¶q
Current and torque in terms of energy
¶Wf (l 1,l2,q )
i1 =
dl
¶l
1
i2 =
¶Wfd (l 1,l2,q )
¶Wfld(l1,l 2,q )
¶l
Tlf d = 2
l
¶q
Tofind the energy by integrating the differential energy:
fd
Wl (
l ,l
10
l 20
20
,q0) =
i2(l1 = 0,l2,q = q0).dl2 +
l 10
ò
ò
0
0
i1(l1,l2 = l20,q = q0).dl1
Magnetically linear system:
l
l
1
= L11i1 + L12i2
2
= L21i1 + L22i2
L12 = L21
Solving for i1 and i2 in terms of l1, l2
æi1 ö æ L
çi ÷ =ç
11
L12 ö
çl
÷
L22 ø è
è 2 ø è L21
1
(L22l 1 - L12l 2 )
D
i1 =
lö
æ
÷
Þ
i2 = 1 (-L2 1l 1 + L11l 2 )
D
2
D = L11L22 L12L21
where
l 20
fd
.dl1
l 10
l10,l20,q0) = ò
L11(q0) l2.dl2 + ò L22(q0)l1 - L12(q0)l20
D(q0 )
D(q0 )
0
0 l
l202 +
10
2 = L11(q0)
L22(q0)
L12(q0) l01l20
2D(q0)
2D(q0)
D(q0 )
Wl (
The coenergy is defined as,
¢
fd
Wl
Þ
fd
Wl
(i1,i2,q ) = l1i1,+ l2i2d(l 1i1) + d (l 2i2) ¢
( i dl
1
= l1di1 + l2di2 + Tfdl dq
¶Wfd (i1,i2,q )
fd
d
W
l
¢
l
(i1,i2,q ) =
¢
¶i1
¶Wfdl (i1,i2,q )
+ i2 d
¶Wfld(i1,i2,q )
¢
¶i2
di1 +
¶Wfdl (i1,i2 ,q )
l
¶i1
l 2 - Tfld dq
¶Wfld(i1,i2,q )
¢
¶q
dq
¶Wfdl (i1,i2 ,q )
di2 +
¢
¢
l
)
1
¢
¶ i2
¶q
The coenergy can be found by integrating the differential,i
0
fd
i20
W
¢
l
(i10,i20,q0) =
ò0
l2(i
1
1 = 0,i2,q = q0).di2 +
ò0
l1(i1,i
2
= i20,q = q0).di1
For a linear system,
W ¢ (i1,i2,q ) =
l
Torque,
1
2
(q )i12+
1
1
2
L22(q ) L12(q )i1i2
2
Tl =
¶Wfl
1 d (q ) 1 dL22(q )
dL12(q )
2
1
2
d (i1,i2,q )
+ i2
+ i1i2 dq
= i1
¶q
2
dq
2
dq
Example 3.7
In the system shown in Fig. 3.15, the inductances in henrys are given as 1 = (3 + cos 2θ) × 10-3;
1 =0.3cosθ; 2 = 30 + 10cos2θ. Find and plot the torque Tfld(θ) for current il =0.8 A and i2 = 0.01 A.
Tfdl
1 dL11(q
1 dL22(q )2
dL12(q )
+ i2
+ i1i2
)2
= i1
2
dq
2
dq
dq
1
1 2
= i12(-2 ´10-3 sin 2q ) + i2 (-20sin 2q ) + i1i2(-0.3sin q )
2
2
= -(1.64sin 2q + 2.4 sinq ) ´10-3 N-m
Dynamic Equations
Model of a singly-excited electromechanical system.
KVL eqn. for the electrical system,
v0 = Ri +
dl
dt
dL(x) dL(x) dx
l = L(x)i
Þ
v0 = Ri + L(x)
d
dL(x)
i + i dt
d
t
=
dtÞ
v0 = Ri + L(x)
dx dt
di
dt
fd
fd
dL
+
(x
i )
dx
d
x
L1
L1
d
t
L1
L2
L2
di
L(x) :
self-inductance volta
dL(x) dx
dx
i
: speed voltage ( : mechanical speed)
dx dt
dt
Forces in the mechanical system in terms of mechanical position (and its derivatives):
Spring:
- x0)
fK = -K(x
Da mper :
fD = -B
Acceleration of mass :
dx
fM = -M
dt
d 2x
K: spring constant
B: damping constant
M: mass of moving part
dt2
Force equilibrium (f0: external mechanical excitation force):
f
fld
= f0 - ( fK + fD + fM )
2
Þ
f0(t) = -M d x - B d - K(x - x0)+ f
x
dt2
dt
l
(x,i)
fd
Note: If x > x0 and increasing (with positive second derivative: M accelerating), then the forces fK , fD ,
and fM all oppose f d.
fl
The differential equations for the overall system:
d
dL(x) dx
+i
i
dx dt
d
2
t
f0(t) = -M d x - B dx - K(x - x0) + f
dt
dt2
v0(t) = Ri + L(x)
fl
d
(x,i)
Given the inputs (excitations) v0(t) and f0(t) these equations can be solved to find x(t) and i(t).
Example 3.10
Figure 3.24 shows in cross section a cylindrical solenoid magnet in which the cylindrical plunger of mass
M moves vertically in brass guide rings of thickness g and mean diameter d. The permeability of brass is
the same as that of free space and is μ0 = 4π × 10-7 H/m in SI units. The plunger is supported by a spring
whose spring constantis K. Its unstretched length is l0. A mechanical load force ft is applied to the plunger
from the mechanical system connected to it, as shown in Fig. 3.24. Assume that frictional force is linearly
proportional to the velocity and that the coefficient of friction is B. The coil has N turns and resistance R.
t terminal voltage is vt and its current is i. The effects of magnetic leakage and reluctance of the steel are
Is
negligible.
Derive the dynamic equations of motion of the electromechanical system, i.e., the differential equations
expressing the dependent variables i and x in terms of vt, ft, and the given constants and dimensions.
The reluctance of the upper and lower gaps,
R1 =
g
m0p xd
R2 =
g
m0p ad
Total reluctance,
g
g
+
R = R1 + R2 = m0p
=
g
æ1
1ö
ç + a ÷ø
èx
m0p ad m0p
Inductance,
N 2 m p adN2æ x
ö
0
L( x) =
æ
x
=
ç
÷ = L¢ç
÷
R
g
öèa + x ø
èa + x ø
The magnetic force acting upward on the plunger in the positive x direction is
f fd x)
l =
¶Wfld¢
(i,
¶x
1 dL( x) 1
aL¢
= i2
= i2
dx
(a
+ x)2
2
2
The induced emf in the coil is
e=
d
di
dL
di dL dx
(Li) = L + i
= L +i
d
dt
dt
dt dx dt
t
æ
=L¢ç
x
÷
è a + x ødt
The dynamical equations of the system:
d 2x
dx
öd
+L
i
ai
dx
(a + x) dt
2
1
ai2
f (t) = -M
- B - K(x - l0) + L ¢
dt2
dt
2 (a + x)2
ai dx
æ
x
di
v(t) = Ri + L¢ç
÷
+öL
(a + x)2 dt
è a + x ø dt