Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
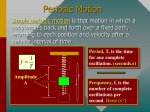
CHAPTER 1 SIMPLE HARMONIC MOTION Reference: George C. Kings, Vibrations and waves, A John Wiley and Sons, Ltd., Publication, 2009. In this chapter we will give basic description of Simple Harmonic Motion (SHM). The importance of SHM is that to a good approximation many real oscillating systems behave like simple harmonic oscillators. We obtain equations for the ways in which the displacement, velocity and acceleration of a simple harmonic oscillator vary with time and the ways in which the kinetic and potential energies of the oscillator vary. To do this we discuss two particularly important examples of SHM: a mass oscillating at the end of a spring and a swinging pendulum. We then extend our discussion to electrical circuits and show that the equations that describe the movement of charge in an oscillating electrical circuit. Outline of the Chapter: 1 SIMPLE HARMONIC MOTION 1.1 Physical Characteristics of Simple Harmonic Oscillators 1.2 A Mass on a Spring 1.2.3 Displacement, velocity and acceleration in simple harmonic motion 1.2.4 General solutions for simple harmonic motion and the phase angle 1.2.5 The energy of a simple harmonic oscillator 1.3 The Pendulum 1.3.1 The simple pendulum 1.3.2 The energy of a simple pendulum 1.3.3 The physical pendulum 1.4 Oscillations in Electrical Circuits: Similarities in Physics 1.4.1 The LC circuit 1.4.2 Similarities in physics PROBLEMS 1.1 Fundamental Concepts in Oscillatory Motion There are many examples of vibrating/oscillating systems in everyday life from large scale structural vibrations in bridges and sky-scrapers and also earthquakes through musical instruments, clock pendula to the nano-world, e.g., vibrating molecules.There are also many other lecture courses that you will take that dependon a thorough understanding of the physics of oscillating systems, e.g.Quantum Mechanics (the Schroedinger Equation of Quantum Mechanics is fundamentally a wave equation) and Electromagnetism. The aim of this course is to acquire a deep understanding of, and beable to describe conceptually (as well as quantify) vibrations and waves Some examples of systems of vibrations and waves: 1.2. The Simple Harmonic Oscillator (SHO) One example is that of a mass on a horizontal spring. 1 We assume a weightless spring and frictionless surface, e.g. the object (mass „m‟) moves on an air track. In physics we usually start with an idealized system, and add the complications later, i.e. friction, gravity and weight of real springs. What would friction do? The force produced by the spring acts to push or pull the mass back to its equilibrium position at !! The restoring force, , on the mass is given by the equation: which is commonly known as Hooke’s Law where x is the displacement from equilibrium and is the spring constant, [ i.e. the restoring force/unit displacement]. The negative sign shows that restoring force acts in the a direction opposite to the displacement ‘x’ !! Displacement (x) is measured from the equilibrium point Amplitude (A) is the maximum displacement A cycle is a full to-and-fro motion; this figure shows half a cycle Period (T) is the time required to complete one cycle Frequency () is the number of cycles completed per second (Hz). =1/T The system must also obey Newton‟s second law of motion which states that the force is equal to mass m times acceleration a, i.e. F = ma. We thus obtain theequation of motion of the mass Remember This is the basic equation of simple harmonic motion (SHM) and is the basis for its description and understanding.The motion is oscillatory and best described by sinusoidal functions like „Sine‟ and „Cosine‟. Figure 1.2 Variation of displacement x with time t for a mass undergoing SHM. Then we can write the force equation: is a constant and it is the angular frequency of the oscillation. can also be defined as return force per unit displacement per unit mass. Note that all simple harmonic oscillators have an equation of this form. It is a linear second-order differential equation. Note that ω2 is equal to the restoring force per unit displacement per unit mass. Another example mass on a vertical spring : 2 If the spring is hung vertically, the only change is in the equilibrium position, which is at the point where the spring force equals the gravitational force. Its length is extended by , by Hooke‟s law ( ), the change in restoring force is . At the equilibrium position, the force on mass is When the mass is displaced downwards by an amount x, the resultant force is given by Which is of course just the equation of motion for SHM !! Figure 1.3 An oscillating mass on a vertical spring. (a) The mass at its equilibrium position. (b) The mass displaced by a distance x from its equilibrium position. 1.3 Solutions for displacement, velocity and acceleration We want expressions for displacement , velocity and acceleration , all as functions of time. Observing periodic motion of mass on spring, we look for a solution for that is also periodic. Periodic functions that are familiar to us are and . Also we can use the solution techniques for the ordinary differential equations. Consequently one can obtain the following general solution for displacement: The trigonometric solution can also be written in the form: One can easily show the equivalences of the solutions by using the trigonometric identities: Comparison of the equations gives that: In the solution is amplitude and is phase angle. The constants can be determined from the initial conditions. At this point, in order to define the SHM we introduce two physical quantities. One of them period and another is frequency . The quantities can be defined as: Frequency is the number of occurrences of a repeating event per unit time. It is also referred to as temporal frequency. The period is the duration of one cycle in a repeating event, so the period is the reciprocal of the frequency. Mathematically we can write the relations: Note that the frequency f is determined by the properties of the oscillator, k and m, and does not depend at all on the amplitude, „A‟ of the oscillation. Figure shows graph of sine and cosine functions. 3 2.4 Analysis of the solution Through this course, in general, we will use the solution of the form: Figure shows graph of the solution and effect of the phase angle on the displacement. As we mentioned before the constant can be determined from initial conditions. We can also determine velocity, acceleration, momentum, energy and other physical quantities using the definitions: 2.5 Energy considerations in SHM Consideration of the energy in a system (kinetic plus potential) is a powerful tool in Vibrations and Waves. For one thing we are dealing with scalar rather than vector quantities. Kinetic energy: . The potential energy „U‟ stored in the spring is equal to the work done in extending or compressing the spring, i.e., force distance. When a spring is extended the force exerted by the spring is: – , thus the potential energy . The total mechanical energy will be conserved, as we are assuming the system is frictionless. 4 Total energy, (K + U) must be constant, let‟s call it „E‟. When mass is at max displacement, as shown in figure 1.6c, i.e. x = A K = 0 since mass is at rest and U = kA2 Total energy, E = K + U = kA2 and so mv2 + kx2 = kA2 which is true for any time t. So for a periodic system oscillating at angular frequency „‟: x = A cos t and v = -Asint U(t) = kx2 = kA2cos2t and K(t) = mv2 = m2A2sin2t E = K + U = kA2cos2t + kA2sin2t = kA2 The variation of the potential and kinetic energies with time is shown in figure. 2.6 Simple Pendulum A simple pendulum consists of a mass at the end of a lightweight cord as shown in figure. We assume that the cord does not stretch, and that its mass is negligible. In order to be in SHM, the restoring force must be proportional to the negative of the displacement. In order to be in SHM, the restoring force must be proportional to the negative of the displacement. Here we have: which is proportional to and not to θ itself. However, if the angle is small, Therefore, for small angles, we have: then we can write This is the equation of SHM with and . where , and we can immediately write down an expression for the angular displacement θ of the pendulum: where is the angular amplitude of oscillation. 2.7 Physical Pendulum In a physical pendulum the mass is not concentrated at one point as in simple pendulum, e.g a uniform rod of length l as shown in figure. 5 It consists of a uniform rod of length l that pivots about a horizontal axis at its upper end. This is a rotating system where the pendulum rotates about its point of suspension. For a rotating system Newton‟s Law becomes where I is the moment of inertia of the body about its axis of rotation and τ is the applied torque. The moment of inertia of a uniform rod of length l about an end is equal to and its centre of mass is located at its mid point. The resultant torque τ on the rod is Then we obtain Using small angle approximation, we get This is SHM with and . 2.8 The LC (resonant) circuit The simplest example of an oscillating electrical circuit consists of an inductor L and capacitor C connected together in series with a switch as shown in Figure 1.10.The capacitor is initially charged to some voltage and then the switch is closed. No resistance included in this circuit - simple & undamped…. Kirchoff‟s law: “the sum of the voltages around any loop of the circuit is zero.” Therefore we can write Once again we have an equation of SHM with . We can also consider the energy of this electrical oscillator. The energy stored in a capacitor charged to voltage is equal to This is electrostatic energy. The energy stored in an inductor is equal to and this is magnetic energy. Thus the total energy in the circuit is given by For these electrical oscillations the charge flows between the plates of the capacitor and through the inductor, so that there is a continuous exchange between electrostatic and magnetic energy. 1.4.2 Similarities in physics We note the similarities between the equations for the mechanical and electrical cases. Equation of motions are: 6 Energy equations are Thus all we have learned about mechanical oscillators can be carried over to electrical oscillators. Moreover we can see a direct correspondence between the two sets of physical quantities involved: • q takes the place of x; • L takes the place of m; • 1/C takes the place of k. For example, the inductance L is the electrical analogue of mechanical inertia m. These analogies enable us to build an electrical circuit that exactly mimics the operation of a mechanical system. This is useful because in the development of a mechanical system it is much easier to change, for example, the value of a capacitor in the analogue circuit than to manufacture a new mechanical component. 7