Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
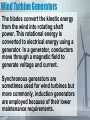
ECE 7800: Renewable Energy Systems Topic 10: Wind Power Fundamentals Spring 2010 © Pritpal Singh, 2010 Types of Wind Turbines Two types: Horizontal and Vertical Axis types There are two types of horizontal axis wind turbines – upwind and downwind machines. Types of Wind Turbines (cont’d) The vertical axis wind turbine has three distinct advantages over horizontal axis wind turbines: 1) No yaw control required to keep them facing in the direction of the wind. 2) Heavy machinery in the nacelle (the housing around the generator, gearbox, etc.) is located on the ground and not on top of the tower – thus, the tower requires less structural support. 3) The blades are always in tension => blades can be relatively lightweight and therefore inexpensive. Types of Wind Turbines (cont’d) On the other hand, the vertical axis wind turbines have several disadvantages over horizontal axis ones: 1) Blades are close to ground where wind speed is lower => limits output power that can be generated. 2) The wind near the ground is also more turbulent, increasing stress on the blades. 3) Control at low and high wind speeds not as good as for horizontal axis wind turbines. Most wind turbines are horizontal axis. Types of Wind Turbines (cont’d) A downwind turbine has the advantage of the wind itself controlling the yaw (leftright motion) of the blade. However, the wind shadowing of the tower can cause excessive blade stress (when the blade swings behind the tower) which can lead to blade failure. Furthermore, it also increases blade noise and reduces output power. Upwind turbines, on the other hand, require complex yaw control systems to keep the blades facing into the wind. However, they behave more smoothly and produce more power. Most wind turbines are of the upwind type. Types of Wind Turbines (cont’d) Another issue with wind turbines is the number of blades that should be used. Water pumping windmills have many blades because this increases the torque available to start the pump. However, for electricity generation, fewer blades are preferred since this allows the turbine to operate at higher rotational speed. With fewer blades, turbulence caused by one blade to the next blade is also reduced. Higher rotational speed allows the wind turbine to smaller in size. Types of Wind Turbines (cont’d) Most modern European wind turbines have three blades whereas American wind turbines have two. Three-blade turbines operate more smoothly with respect to tower interference and wind speed variation. However, the third blade does add considerably to the cost and weight of the turbine. Construction of a three-blade turbine is also generally more difficult than a two-blade turbine. Power in the Wind The power in the wind Pw is related to wind speed by: 1 3 Pw Av 2 where ρ = density of air, A = cross-sectional area through which the wind passes, and v = wind speed In SI units, Pw is in Watts, ρ is in kgm-3, A is in m2 and v is in m/s (1m/s = 2.237mph) Power in the Wind (cont’d) Note: Pw increases as cube of wind speed. Thus energy in 1 hr. of 20 mph wind is same as 8 hrs. of 10 mph wind or 2½ days of 5 mph wind! Power in the Wind (cont’d) Also, the wind power is proportional to the swept area of the turbine blades. For a horizontal axis wind turbine, A=(π/4)D2, so wind power is proportional to the square of the blade diameter. The cost of a turbine increases in proportion to the blade diameter but the power output increases by the square of the blade diameter. Thus, larger systems are more cost-effective. Power in the Wind (cont’d) For a vertical axis wind turbine, the effective area of the blades is approximately given by A≈⅔D.H as shown in the figure below: Power in the Wind (cont’d) Example 6.1 Temperature Correction for Air Density The density of air decreases with increase in air temperature. The density of air at absolute temp., T is given by: ρ= P x mol. wt. x 10-3 RT where R = ideal gas constant (8.2056 x 10-5 m3.atm.K-1.mol-1) and P = absolute pressure (atm.) Temperature Correction for Air Density (cont’d) Example 6.2 Altitude Correction for Air Density Air density also depends on atmospheric pressure and therefore changes with altitude. Atmospheric pressure changes with altitude in that more pressure is exerted from the air above on a lower section of air (see figure below). Altitude Correction for Air Density (cont’d) Thus, the pressure at height z is given by: P(z) = P(z+dz) + gρAdz A where g = 9.806m/s2 is the acceleration due to gravity Thus, dP = - ρg dz Since ρ itself is a function of P, we can write: 3 gmol.wt.x10 dP dz RT .P Altitude Correction for Air Density (cont’d) There is another complication – air temperature varies with altitude (at a rate of 6.5ºC/km.) Neglecting this effect, we can put in the values of the variables into the previous equation and at a temperature of 15ºC, we get: dP = -1.185 x 10-4.P dz Thus, P=P0e-1.185x10-4H where P0 is the reference pressure (1 atm.) and H is the height in meters. Altitude Correction for Air Density (cont’d) Example 6.3 Altitude Correction for Air Density (cont’d) Temperature and altitude corrections for air density can be made using correction factors as follows: ρ = 1.225KTKA where the correction factors for temperature KT and altitude KA are given in the table: Impact of Tower Height One way to get more power output from a wind system is to increase the height to which the blades are exposed. This is because friction close to the ground reduces wind speed. One expression used to characterize the impact of the roughness of the Earth’s surface to wind speed is: v H v0 H 0 where v is the windspeed at height H, v0 is the windspeed at height H0 and α is the friction coefficient. Impact of Tower Height (cont’d) The friction coefficient, α, depends on the terrain over which the wind is blowing. For open terrain, a value of 1/7 is used. Friction coefficients for various terrains are given in the table below: Impact of Tower Height (cont’d) The below figures shows the impact of tower height on windspeed and power for different values of α. Impact of Tower Height (cont’d) Example 6.6 This example illustrates an important point – a blade at the top of its rotation can experience much higher wind speeds than at the bottom of its rotation. This results in significant stressing of the blades and can result in blade fatigue and failure. Maximum Rotor Efficiency The analysis we will consider to determine the maximum efficiency of a wind turbine was first developed by Betz in Germany in 1919. Wind approaching a turbine is slowed down as a portion of its kinetic energy is extracted (see figure below): Maximum Rotor Efficiency (cont’d) The wind leaving the turbine is slower and of lower pressure than the incident wind and therefore its volume expands. The envelope of the air mass passing through the turbine is called a “stream tube”. The wind velocity cannot drop to zero as it passes through the turbine otherwise there would be no further wind to come through the rotor. Also, the wind velocity after the turbine must be less than before otherwise no kinetic energy would be extracted. Maximum Rotor Efficiency (cont’d) Therefore there must be a maximum power that can be extracted from the wind (just like the maximum power point for a solar module). Let the upwind velocity be v, the velocity at the blades, vb, and the downwind velocity be vd. The mass flow rate through the stream tube, m, is constant. The power extracted by the blades Pb is given by: 1 2 2 Pb m (v vd ) 2 Maximum Rotor Efficiency (cont’d) The mass flow rate, m, is given by: m Avb Assuming vb = (v+vd)/2, we get: 1 v vd 2 2 Pb A ( v vd ) 2 2 Defining λ as v/vd , we get: 1 v v 2 2 2 Pb A ( v v ) 2 2 1 3 1 2 Av . (1 )(1 ) 2 2 Power in the wind Fraction extracted Maximum Rotor Efficiency (cont’d) Thus the rotor efficiency, Cp , is given by: 1 C p (1 )(1 2 ) 2 In order to find the max. efficiency, we need to determine dCp/dλ and set it to zero. The result is λ=⅓, i.e. the max. efficiency of the rotor occurs when the downstream velocity is slowed to ⅓ of its upwind velocity. This gives a max. rotor efficiency Cp of 59.3%. This is known as the Betz efficiency or Betz’s law. Maximum Rotor Efficiency (cont’d) For a given wind speed, the rotor efficiency depends on the speed of rotation of the blades. Too slow means low efficiency – to much air passing by without being converted to electrical energy. Too fast also means low efficiency because turbulence created by one blade affects the next blade. Rotor efficiency is therefore a function of tip-speed ratio which is defined as the ratio of rotor tip speed to wind speed. Maximum Rotor Efficiency (cont’d) A plot of typical efficiency vs. tip-speed ratio is shown in the below graph: Maximum Rotor Efficiency (cont’d) Example 6.7 Wind Turbine Generators The blades convert the kinetic energy from the wind into rotating shaft power. This rotational energy is converted to electrical energy using a generator. In a generator, conductors move through a magnetic field to generate voltage and current. Synchronous generators are sometimes used for wind turbines but more commonly, induction generators are employed because of their lower maintenance requirements. Synchronous Generators The magnetic field in very small synchronous generators may be created by a permanent magnet. However, more commonly, the magnetic field in a synchronous generator is created by dc current applied to the rotor using slip rings and brushes. An exciter is used to rectify the ac input voltage. Induction Generators Most wind turbines use induction generators rather than synchronous machines. Since they do not rotate at a fixed speed, these are referred to as asynchronous generators. The magnetic field in an induction machine is created in the stator winding by rotating the magnetic flux through windings in the stator. This induces a current and net motion in the conductors of the rotor. No slip rings or brushes are needed and so induction generators are cheaper to run and maintain compared to synchronous generators. Induction Generators (cont’d) The rotating magnetic flux in the stator of an induction generator is shown in the diagram below: Induction Generators (cont’d) A squirrel cage rotor consists of conductor bars shorted together to create a “treadmill”. The conductors are embedded in an iron core of steel laminations to minimize eddy current losses. As the magnetic field moves around, the current induced in the conductors causes the rotor to turn. Induction Generators (cont’d) When excitation current is provided to the stator and the shaft is connected to the wind turbine and gearbox, the induction machine will start motoring up to its synchronous speed. Once the wind speed is high enough that the generator exceeds synchronous speed, the induction machine becomes a generator delivering power to its stator windings. However, what happens if no power grid is available to excite the current in the stator? Induction Generators (cont’d) A self-excited generator can be created by exciting a resonance between the inductance of the stator field windings and external capacitors. A remnant magnetic field in the rotor provides the initial stimulus to excite the resonance. Speed Control for Maximum Power To ensure high efficiency, the tip-speed ratio should be ~ 4-6, i.e. blade speed should be 4-6 x wind speed. Thus turbine blades should change their speed as wind speed changes. The power delivered at different wind speeds and blade speeds is shown below: Speed Control for Maximum Power (cont’d) For grid-connected wind turbines, a fixed output frequency is required. Therefore, we would like to have a variable rotor speed but a fixed generator speed. There are several ways to effectively change speeds, including: • Change number of poles on the generator; • Multiple gearboxes; • Varying the slip of induction generators using external resistors. Speed Control for Maximum Power (cont’d) Another approach is to indirectly connect to the grid by using power electronics to transform variable speed generated power to clean, fixed frequency ac output as shown below: