Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Path integral formulation wikipedia , lookup
Dynamic substructuring wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Routhian mechanics wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Centripetal force wikipedia , lookup
Wave packet wikipedia , lookup
Seismometer wikipedia , lookup
Equations of motion wikipedia , lookup
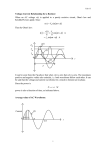
Mid-Term Exam in MAE351 Mechanical Vibrations Mechanical Engr. Dept. 1. KAIST April 22, 2015 Damping of a single-DOF under-damped system can be estimated by measuring consecutive peaks of free vibration in an experiment. 1) Explain how the logarithmic decrement is defined. (10) 2) Derive a relation between the logarithmic decrement and the damping ratio of a system with viscous damping. (10) 2. Consider a base excitation problem with the configuration shown in Fig. 1, where the base motion is transmitted through a dashpot. 1) Derive an expression for the amplitude of force transmitted to the support as a function of the excitation frequency. (5) 2) Derive an expression for magnitude of the base of negligible mass force transmissibility, which is defined as the ratio F(t) of the force onto the support to the force required to excite the base. (5) 3) Fig. 1 For m = 100 kg, c = 50 N·s/m, Y = 0.03 m and ω = 3 rad/s, determine the stiffness k that b makes the force transmissibility equal to 0.5 and the amplitude of the force F(t) required on the base of negligible mass to enable this excitation. (10) 3. Fig. 2 is a schematic diagram for vibration transducers, whose basic principle is to transduce an electric signal in proportion to the relative displacement z x y . The equation is given by mz cz kz my and the relative displacement response z(t) to a harmonic displacement excitation y t Y cos t is given by z t Z cos t with 1 Fig. 2 Z Y 2 1) 1 1 2 (1 2 ) 2 2 n n 2 n 2 . Draw a figure of magnitude of the frequency response function for a seismometer which is used to measure vibration displacement. Make a note on the figure for a useful frequency range and explain about the reasoning for your choice. (10) 2) Draw a figure of magnitude of the frequency response function for an accelerometer which is used to measure vibration acceleration. Make a note on the figure for a useful frequency range and explain about the reasoning for your choice. Further, explain about the relationship between sensitivity and useful frequency range for the accelerometers. (10) 4. Response of a under-damped single-DOF system to an arbitrary input F(t) can be obtained using ent sin d t is the unit impulse response convolution integral x(t ) F ( )h(t )d , where h(t ) md 0 t function. It can be also obtained using Laplace transforms in Table 1. 1) Choose your own method, i.e., either convolution integral or Laplace transform & Table 1 to show that response of the system subject to a step function of magnitude of F0 at time t = 0 can be obtained as follows: x t F0 1 ent cos d t , tan -1 . 1 2 k 1 1 2 and draw an approximate graph. (10) 2) Using the equation given in 1) for the step response, determine the first peak time tp:1 at which the response will take its maximum value. (5) 3) Using the equation in 1), derive the n-th peak time tp:n. at which magnitude of the n-th peak becomes Defining the settling time ts as the time tp:n F0 ln approximately for 1 , show that ts k n small values of and . For an example, ts 60 n for ==. (5) F ( s) e st f (t )dt f(t) 0 1 1 1 s 2 2 1 sa e at 3 a s a2 sin at s s a2 cos at a ebt sin at 2 4 2 5 s b 2 a2 sb 6 s b 2 ebt cos at a2 Table 1 5. Four explanations on a single-DOF system are given and a statement for question follows after each explanation. Answer whether the statement for question is right or wrong. the statement must be also provided. positive points. 1) Reasoning for your answer to If your answer together with the reasoning is right, you will get If it is wrong, however, you may get negative points. For a mass-damper-spring system whose motion is governed by: d 2x dx m 2 c kx(t ) 0 dt dt dynamic behavior is said to be critically damped when (a) c 1 and over-damped when (b) 2 mk 1 . The homogeneous solution in case of (a) is given by x(t ) a1e t a2te t and the one in case n of (b) is given by x(t ) ent (a1e 2 1nt a2e 2 1nt ) , where n n k . It can be seen that both m responses decrease exponentially as time t goes to infinite. Statement for question: By expressing responses subject to an initial condition: x(0) x0 , x(0) 0 , it can be shown that the response in case of (a) becomes zero in a finite time while the response in case of (b) does not become zero in a finite time. (5) 2) For a simple pendulum, the equation of motion is given by a nonlinear differential equation as follows: Fig. 3 3 d 2 g sin (t ) 0 dt 2 l Two solutions for the above equation are shown in Fig. 3, where one is a solution of the nonlinear differential equation and the other is a solution of the linearized differential equation. Statement for question: The solution of the linearized differential equation is the dashed curve. (5) 3) A pendulum consisting of a rigid body as shown in Fig. 4 is r called compound pendulum, for which center of percussion C is O y G defined as a distance qo such that a simple pendulum (a massless rod pivoted at O with the same point mass as the rigid body at its tip qo C point) of length qo has the same period. Statement for question: When the compound pendulum is a uniform rod of length l, the center of percussion is given by q0 l . (5) 2 4) Response of a under-damped system subject to an initial condition x(t ) x0 2 ( Fig. 4 v0 n x0 d x0 , v0 is given by x0d c ) 2 ent sin d t tan 1 . , where n k / m and 2 mk v0 n x0 x0 , v0 and obtained as Statement for question: The response of the system subject to both an initial condition an impulse x(t ) of magnitude Fˆ mv0 1 2 ent sin d t tan 1 1 2 x0 at . (5) 4 time t 0 can be