Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
EMBEDDED
SYSTEM BASED
DISASTER
MANAGEMENT
PROJECT REPORT
ON
EMBEDDED SYSTEM BASED DISASTER
MANAGEMENT
BY
Name
1) Punit Thakkar
2) Darshini Desai
3) Mitesh Dave
Roll No.
69
71
72
Seat No.
DEPARTMENT OF
ELECTRONICS AND TELECOMMUNICATION ENGINEERING
Shri Vile Parle Kalvani Mandal’s
Dwarkadas J. Sanghvi College of Engineering
Plot no. U-15, JVPD Scheme, Bhaktivedanta Swami Marg,
Vile Parle (W), Mumbai – 400 056
2
Shri Vile Parle Kelvani Mandal’s
Dwarkadas J Sanghvi College of Engineering
Plot. No. U – 15, JVPD Scheme, Bhaktivedanta Swami Marg,
Vile Parle (W), Mumbai – 400 056
Department of Electronics and Telecommunication Engineering
This is to certify that the Project report entitled
“EMBEDDED SYSTEM BASED DISASTER MANAGEMENT”
Submitted by:
1. Punit Thakkar
2. Darshini Desai
3. Mitesh Dave
Students of Electronics and Telecommunication Engineering have
successfully completed their Project required for the fulfillment of B. E. Degree as per the
norms prescribed by the University of Mumbai during the first half of the year 2007. The
project report has been assessed and found to be satisfactory.
_______________
Under EGURU, Ekalavya
Programme, KReSIT,
IIT Bombay.
Group ID : EGURU10202
Internal Guide
(http://ekalavya.it.iitb.ac.in)
External Guide
_______________
Head of Department
_______________
Principal
_______________
______________
Internal Examiner
External Examiner
3
Preface
N o w a da y’ s Em b e d de d s yst em h a s c a p t ur ed
t h e fi e ld o f i n du st r y a s w e l l a s do m e st i c o r p r a c t i c a l li fe
o f h um a n b ei n g s . G la n c i n g a t r ec en t de v e lo p m en t i n t h e
f i el d o r el ec t r o n i c s a n d c o m p ut er s, we c a n j us t s a y t h a t
t h ey h a v e c a p t u r e d p r a c t i c a l ly e v e r y m o d e o f h um a n ’ s
l i fe a n d h a v e g i v en a n ew w a y t o i t . Ta k i n g i n t o
c o n si der a t i o n , t h e n e ed t o s a v e li v i n g b ei n g s h a s
i n sp i r e d u s t o d ev e lo p a D i sa s t e r M a n a g em en t S y st em
t h a t r em o t e l y c o n t r o l s w i d e r a n g e o f a p p li a n c e, i n a n d
a r o u n d t h e a f fe c t ed a r ea , wi t h t h e h elp o f a Em b e dd ed
S y st em .
F i n a l l y we f ee l v er y m u c h sa t i s fi ed i n
p r e sen t i n g t h i s p r o j ec t , wh i c h wo u ld b e o f g r ea t u s e t o
o ur so c i et y.
4
Acknowledgment
W e t a k e g r e a t p l e a s ur e t o p r e s en t t h i s p r o j e c t r ep o r t
o n “Em b e dd ed S y st em b a s ed D i sa st er M a n a g em en t ”.
W e h a v e t a k e n g r e a t c a r e t h a t t h e i n fo r m a t i o n
p r o v i de d b y u s i s i n c o r r ec t , b ut ev en t h en w e w e lc o m e
a n y s ug g es t i o n s o r c o r r e c t i o n s.
Wh en w e l o o k up t h i s t a sk i t wa s r ea l ly di ff i c u lt t o
w o r k o ut b ut t h e v a r i a b l e g ui da n c e g i v e n b y o ur
p r o j e c t g u i d e Pr o f. Mr . S a n j a y . B. D e sh m uk h h a s m a de
t h i s p r o j e c t s uc c e s sf u l.
W e a r e v e r y g r a t e fu l t o o u r H. O . D Pr o f. Mr . Ki s h o r e S .
K i n a g e, wh o s e c o n st a n t en c o ur a g em en t , p r ec i o u s
g ui da n c e a n d fu l l - f le dg e d c o - o p e r a t i o n h a s l ed t o t h e
s u c c e ss o f t h i s p r o j e c t .
W e wo ul d li k e t o ex p r e s s o u r t h a n k s t o eG URU
p r o g r a m m e ( Pr o j e c t ek a l a v ya T ea m a t I I T BO M B AY )
f o r a l l t h e si g n i f i c a n t c o - o p er a t i o n a n d fr i en d ly
t r ea t m en t g i v en t o u s d ur i n g p r ep a r a t i o n fo r t h e
project.
O u r sp ec i a l t h a n k s fo r la b o r a t o r y a s si st a n c e t o Mr .
A s h o k T a n n a a n d C o m p a n y ( Ta n n a El ec t r o n i c s )
f o r t h ei r c o - o p er a t i o n fo r v a r i o u s i n st r um en t s a n d
s o m e h e lp f u l t i p s.
5
Table of Contents
Sr.No
Title
Page No.
1.
INTRODUCTION
7
2.
BLOCK DIAGRAM
10
3.
CIRCUIT DIAGRAM & CIRCUIT
WORKING
14
4.
SOFTWARE DEVELOPMENT
25
5.
FEATURES
49
6.
APPLICATIONS
50
7.
MERITS & DEMERITS
52
8.
FUTURE EXPANSION
54
9.
TESTING & MEASUREMENTS
55
10.
BIBLIOGRAPHY
57
11.
IC SPECIFICATIONS(DATA SH EETS)
59
6
INTRODUCTION
7
Intro duction :
Year after years devastating disasters ravage the land mass
and leave behind countless victims. Pre -disaster planning can
have a significant impact on minimizing the effect of tragedy
and
sufferings,
coordinated
and
may
result
(non-panicked)
in
response
a
more
in
efficient
saving
lives
and
and
properties. With seismic studies revealing sizable portions of
the Indian Sub-continent prone to earthquake(s), it is desirable
for India to be equipped with disa ster management equipment
at all times. The country is also prone to other calamities like
cyclones, droughts, floods, fires etc. In a report by UN Office
for
the
Coordination
of
Humanitarian
Affairs
(OCHA)
on
Gujarat earthquake, it is mentioned that in su ch situations for
saving of lives and rehabilitation to be taken on a war footing,
it is imperative to develop disaster management equipments on
priority
such
communication
as
detecting
equipment
cutting
etc.
which
concrete
can
be
slabs,
mobile
deployed
fo r
clearing debris.
8
General Working of System
Here
the
system
continuously
obeys
the
commands given by the PC and moves the vehicle in desired
direction. The control to mov e the vehicle can be given using a
program written in C / C++. This takes place wirelessly using a
transmitting
and
a
receiving
antenna.
The
transmitting
antenna is interfaced to PC using embedded hardware.
The embedded system placed on the vehicle
is
interfaced
to
PC
via
RS232
serial
port.
It
uses
microcontroller to handle the command issued by the operator
to find out the temp of the living element. Here a temperature
sensor mounted on the motor is used for this purpose.
After it
senses the desired temperature , p rogram can move the vehicle
in desired direction.
Graphically
element
is
temperature
shown
on
and
hence
the
the
the
monitor
vehicle
direction
screen
can
be
of
the
along
moved
living
with
to
the
that
position.
Here a camera may be mounted and hence
controlled to provide visual display of the surrounding which
may be included as an additional application.
9
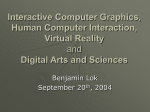
Block Diagram :
Figure A :
10
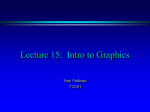
Figure B:
PC
11
General Descri ptio n:
RF Chipset:
This chipset has the capability of communicating over radio
frequencies ( TX / RX vehicle).
Micro controller based circuit:
This
module
communicating
triggering
will
perform
with
RF
various
various
chipset,
outputs
like
functions
processing
hooter
or
the
such
as
inputs
and
transmitting
RF
signal.
Power supply:
This module will provide power supply to all the modules as
mentioned :
RF chipset
:
9v .
Microcontroller
:
5v, 150mA.
It will draw the necessary supply from the connected battery,
which can fulfill the power requirement for 24 hours.
DESCRIPTION OF BLOCK DIAGRA M:
The Unit Consists Of Following Blocks:
Power Supply:
It provides regulated power supply to micro controller,ADC,
reset circuits, and the sensors.
Analog To Digital Converte r:
12
It accepts
temperature inputs and inputs from sensors and
generates the digital code.
Micro controller:
It accepts digital code from ADC i. e temperature value and
transmits it to the host.
Signal conditioner:
Analog signals are amplified to get 0 to 5 volts swing and to
make it compatible with ADC.
Relay driver or stepper motor driver is used to move stepper
motor.
At
receiving
end
a
computer
is
used
to
give
the
desired
commands.
SYSTEM OPERATING ENVIRONMENT:
The project is 89c51 micro controller based and implemented
using assembly language at the transmitter side. At t he receiver
side a PC is interfaced to detect various faults in different mini
pillars. The operating platform is windows and the language
used is C/C++ (Graphics).
1) C LANGUAGE:
a. Graphics is easier to implement with aid of c language.
b. Data input is possible from the COM ports.
c. File handling is easy.
2) ASM code optimization
a. Micro controller executes only machine language.
b. Machine code takes less space as compared to language.
c. Easy to debug.
d. Close to hardware hence fault finding is e asy.
13
CIRCUIT DIAGRAM AND CIRCUIT
WORKING
14
CIRCUIT DIAGRAM
15
Ci rcu it Working :
Temperature Sensor :
The LM35 series are precision integrated circuit temperature
sensors, whose output voltage is linear ly proportional to
Celsius temperature. The LM35 thus has an advantage over
linear temperature sensors calibrated in degree Kelvin as the
user is not required to subtract a large constant voltage from
its output to obtain convenient centigrade scaling.The LM35’s
low output impedance, linear output, and precise inherent
calibration make interfacing to read out all control circuitry
especially easy. The LM35 is rated to operate over -55 to +150
degree C temperature range.
The LM35 is mounted on the motor and used to sense the
temperature of the alive bodies. The embedded system placed on
the vehicle is interfaced to PC via RS232 serial port. It uses
microcontroller to handle the command issued by the operator.
The vehicle is moved to the desired location via the PC command
and the motor is used to rotate the temperature sensor in steps
of 1.8 degrees. Since dead bodies do not produce heat, the LM35
senses the temperature of the alive bodies and conveys the
information to the PC where graphically the precise lo cation of
the living body is shown on the monitor screen along with the
temperature and hence the vehicle can be moved to the desired
position to retrieve the located alive bodies.
Analog to Digital Convertor:
IC 809 is an 8-channel analog to digital con vertor.It is
designed to give fast,accurate and repeatable conversions over
16
a wide range of temperatures.it accepts temperature inputs and
inputs from sensors and generates corresponding digital code.
The temperature sensor LM35, used to detect the temper ature of
alive bodies, is connected to ADC 0809 and inputs the
temperature reading to the analog to digital convertor. The
output of ADC 0809 is connected to the microcontroller
89C51.Thus, the ADC 0809 will take the temperature inputs
from the LM35 and convert analog data to digital form and
provide digital output to the microcontroller.
RS232C :
RS232C is a telecommunication standard for binary serial
communication between devices. It supplies the roadmap for the
way devices speak to each other using s erial ports. The devices
are commonly referred to as DTE (data terminal equipment)
and DCE (data communication equipment); for example, a
computer and modem, respectively.
It sets acceptable voltage and signal levels, along with common
pin designations or configurations, for wiring serial connector
ports. It also specifies protocol for the control information
passed between devices which include events such as indicating
the beginning or end of a data stream. Without standards like
this, manufacturers woul d have no roadmap to build compatible
product lines for technology.
The RS232C serial port is used to interface PC to the embedded
system placed on the vehicle which uses the microcontroller
89C51 to handle the command issued by the operator. The TXD
and RXD pins of Port 3 of 89C51 are connected to the serial
port. The future scope of the system says that the serial port
17
can be replaced with Wireless or Bluetooth Technology to
eliminate the use of hardwired connections.
RS232 Pinout
The RS232 specification only defines the pin -out for a 25 pin D
connector; how ever, the 9 pin is used more often (defined by
EIA-574). The serial port found on Personal Computers uses a
9-pin connector. Normally the RS232 serial port is used for
external modems, and in older systems for the mouse and
printer interfaces. Most computer systems have only one serial
port. The RS232 pinout is provided below.
DB-9 Connector Pin Out
Pin # Signal Name Signal Description
CD
Carrier Detect
1
2
RXD
Receive Data
3
TXD
Transmit Data
4
DTR
Data Terminal Ready
5
GND
Signal Ground / Common
6
DSR
Data Set Ready
7
RTS
Request To Send
8
CTS
Clear To Send
9
RI
Ring Indicator
RS232 Serial Port Signal Description
TXD: Transmit Data; The data sent from the Data Terminal and
received by the
Data Set.
RXD: Receive Data; The data sent from the Data Set and
received by the Data
18
Terminal.
DTR: Data Terminal Ready; Used by the Data Terminal to
signal to the Data Set
that it is ready for operation, active high.
DSR: Data Set Ready; Used by the Data Set to signal to the
Data Terminal that
it is ready for operation and ready to receive data, active high.
RTS: Request To Send; Used by the Data Terminal to signal the
Data Set that it
may begin sending data. The Data Set will not send out data
with out this signal, active high.
CTS: Clear To Send; Used by the Data Set to signal the Data
Terminal that it may
begin sending data. The Data Terminal will not send out data
with out this signal, active high.
CD: Carrier Detect; Used by the Data Set to indicate to the Data
Terminal that
the Data set has detected a carrier (of another device).
RI: Ring Indicator; Used by the Data Set to indicate to the Data
Terminal that a
ringing condition has been detected.
GND: Ground; The common return for all signals on the
interface.
When using Software Flow Control(XON, XOFF); you only need
3 lines, TX (data),
19
RX (data), and GND. XON being equal to ready, XOFF equal to
not ready.
Parallel Port :
LPT (Parallel) port
Pins layout
Connector : female DB25
20
D Description Name Pin
- I/O Strobe
STROBE 1
I/O Data Bit 0 D0
2
I/O Data Bit 1 D1
3
I/O Data Bit 2 D2
4
I/O Data Bit 3 D3
5
I/O Data Bit 4 D4
6
I/O Data Bit 5 D5
7
I/O Data Bit 6 D6
8
I/O Data Bit 7 D7
9
- I Acknoledge ACK
10
I
Busy
BUSY 11
I
Paper End PE
12
I
Select Out SLCT
13
Pin
Name
Description D
14 AUTO FEED Auto-Feed
-O
15 ERROR
Error
-I
16 INIT
Init (Reset)
-O
17 SLCT IN
Select In
-O
18 GND
Ground
/
19 GND
Ground
/
20 GND
Ground
/
21 GND
Ground
/
22 GND
Ground
/
23 GND
Ground
/
24 GND
Ground
/
25 GND
Ground
/
S GND
Chasis Ground /
Signals
STROBE (Strobe) active low output
Notify the printer that data available on D0 o D7 are valid.
D0 - D7 (Data Bus) outputs Data byte send to the printer,
output only in "compatible" mode and bi -directionnal in newer
modes.
ACK (Acknoledge) active low input
Notify the computer that the printer is ready to receive the next
data.
BUSY (Busy) active low input
Printer buffer full or printer busy, the computer must wait for
this signal to get high again to continue sending data.
21
PE (Paper End) active high input
Printer out of paper.
SLCT (Select Out) active high input
Printer ready (On-line).
AUTO-FEED (Auto-Feed) active high output
Printer Line feed.
ERROR (Error) active low input
Error detected by the printer.
INIT (Reset) active low output
Initialize the printer (reset).
SLCT IN (Select In) active low output
Send a on-line request to the printer.
Programming
Standard Resources :
LPT1 I/O 0378-037A/037F IRQ 7 DMA 3
LPT2 I/O 0278-027A/027F IRQ 5 DMA 3
IRQ 7 /
LPT3 I/O 03BC-03BE
LPT ports can use only I/O (3 adresses) in standard mode ; both
I/O (3 adresses) and an IRQ, dunno what's that mode ; or I/O
(8 adresses), IRQ and DMA in ECP mode.
22
I/O Resources :
Bits positions
Description
7
6 5
4
3
2
1
0
Base+0 D7
D6 D5 D4 D3
D2 D1
D0
<- Data output
Base+1 BUSY ACK PE SLCT ERROR /
/
Time-out <- Status register
SLCT
AUTO
<- Control
Base+2 /
/
/ IRQ*
INIT
STROBE
IN
FEED
register
IRQ enable the IRQ for ACK, 1=enabled, 0=disabled.
Address
Note: dunno yet what are the 5 other addresses used on
ECP for.
"Base" is the first I/O Address used by the parallel port,
0378 for LPT1 for exemple.
"?" are signals, but I have to check witch ones.
"/" are undefined bits, they must be ignored.
Voltage Regulator :
The +5 volts supply is useful for both analog and digital
circuits.DTL,TTL and CMOS IC’s will all operate nicely from a
+5 volts supply.The +5 volts power supply is b ased on the
commercial 7805 voltage regulator IC.This IC contains all the
circuitry needed to accept any input voltage from 8 to 18 volts
and produce a steady +5 volt output,accurate to within 5%(0.25
V).It also contains current limiting circuitry and ther mal
overload protection,so that the IC wont be damaged in case of
excessive load current;it will reduce its output voltage instead.
The two 100 micro Farad capacitors serves as a ‘reservoir’
which maintains a reasonable input voltage to the 7805
throughout the entire cycle of the ac line voltage.it helps to
keep the the power supply output voltage constant when load
conditiond change.
23
Microcontroller 89C51 :
The AT89c51 is a low power, high performance CMOS 8bit
microcomputer
erasable
with
read
4K
only
bytes
of
memory
Flash
pro grammable
(PEROM).
The
and
device
is
manufactured using ATMEL's high -density nonvolatile memory
technology and is compatible with industry standard MCS -51
instruction
program
set
and
memory
pinout.
to
be
The
on -chip
reprogrammed
Flash
allows
in-system
or
the
by
a
conventional nonvolatile memory programmer. By combining a
versatile 8-bit cpu with Flash on a
monolithic
chip;
microcomputer
the
which
ATMEL
provides
AT89C51
a
highly
is
a
flexible
powerful
and
cost
effective solution to many embedded control applications.
The AT89CS1 provides the following standard features:
4Kbytes of flash
128 bytes of RAM
32 10 lines
32 10 lines
2-16 bit timer/counter
a 5vector 21evel interrupt architecture
a full duplex serial port
chip oscillator and clock circuit
In addition the AT89C51 is designed
operation
with static logic for
down to zero frequency and supports two software
selectable power saving modes. The ideal mode stops the cpu
while
allowing
the
RAM,
timer/counters,.
serial
port
and
interrupt systems to continue functioning. The power down
mode saves the RAM content but freezes the oscillator disabling
all other chip functions until the next hardware resets.
24
SOFTWARE
DEVELOPMENT
25
Assembly language
programming:
mov 141,#253
clr p1.0
mov 139,#253
lcall delay
mov a,135
clr P1.1
anl
lcall delay
a,#127
mov 135,a
clr p1.2
mov 152,#80
setb P1.3
mov 137,#32
lcall delay
mov 136,#64
clr
mov 128,#0
mov a,p2
mov 144,#0
lcall sendbyte
mov 160,#0
sjmp back
p1.3
BACK: lcall getchar
;move steppermotor
setb p0.0
delay: mov r4,#0ffh
b3:
djnz r4,b3
ret
lcall delay
setb P0.1
getchar:
lcall delay
nop
clr P0.1
b5:
lcall delay
mov a,sbuf
; cho
clr ri
jnb ri ,b5
ret
26
sendbyte:
nop
b5:
jnb ti ,b5
mov sbuf,a
clr ti
ret
8051 Tutorial: Addressing Modes
An "addressing mode" refers to how you are addressing a given
memory location. In summary, the addressing modes are as
follows, with an example of each:
Immediate Addressing MOV A,#20h
Direct Addressing
MOV A,30h
Indirect Addressing
MOV A,@R0
External Direct
MOVX A,@DPTR
Code Indirect
MOVC A,@A+DPTR
Each of these addressing modes provides important flexibility.
Immediate Addressing
Immediate addressing is so -named because the value to be
stored in memory immediately follows the operation code in
memory. That is to say, the instruction itself dictates what
value will be stored in memory.
For example, the instruction:
MOV A,#20h
27
This instruction uses Immediate Addressing because the
Accumulator will be loaded with the value that immediately
follows; in this case 20 (hexidecimal).
Immediate addressing is very fast since the value to be loaded
is included in the instruction. However, since the value to be
loaded is fixed at compile -time it is not very flexible.
Direct Addressing
Direct addressing is so -named because the value to be stored in
memory is obtained by directly retrieving it from another
memory location. For example:
MOV A,30h
This instruction will read the data out of Internal R AM address
30 (hexidecimal) and store it in the Accumulator.
Direct addressing is generally fast since, although the value to
be loaded isnt included in the instruction, it is quickly
accessable since it is stored in the 8051s Internal RAM. It is
also much more flexible than Immediate Addressing since the
value to be loaded is whatever is found at the given address -which may be variable.
Also, it is important to note that when using direct addressing
any instruction which refers to an address between 00h a nd 7Fh
is referring to Internal Memory. Any instruction which refers to
an address between 80h and FFh is referring to the SFR control
registers that control the 8051 microcontroller itself.
The obvious question that may arise is, "If direct addressing an
address from 80h through FFh refers to SFRs, how can I access
the upper 128 bytes of Internal RAM that are available on the
28
8052?" The answer is: You cant access them using direct
addressing. As stated, if you directly refer to an address of 80h
through FFh you will be referring to an SFR. However, you may
access the 8052s upper 128 bytes of RAM by using the next
addressing mode, "indirect addressing."
Indirect Addressing
Indirect addressing is a very powerful addressing mode which
in many cases provides an exceptional level of flexibility.
Indirect addressing is also the only way to access the extra 128
bytes of Internal RAM found on an 8052.
Indirect addressing appears as follows:
MOV A,@R0
This instruction causes the 8051 to analyze the value of the R0
register. The 8051 will then load the accumulator with the value
from Internal RAM which is found at the address indicated by
R0.
For example, lets say R0 holds the value 40h and Internal RAM
address 40h holds the value 67h. When the above instruction is
executed the 8051 will check the value of R0. Since R0 holds 40h
the 8051 will get the value out of Internal RAM address 40h
(which holds 67h) and store it in the Accumulator. Thus, the
Accumulator ends up holding 67h.
Indirect addressing always refers to I nternal RAM; it never
refers to an SFR. Thus, in a prior example we mentioned that
SFR 99h can be used to write a value to the serial port. Thus
one may think that the following would be a valid solution to
write the value 1 to the serial port:
29
MOV R0,#99h ;
Load the address of the serial port
MOV @R0,#01h ;
Send 01 to the serial port -- WRONG!!
This is not valid. Since indirect addressing always refers to
Internal RAM these two instructions would write the value 01h
to Internal RAM address 99h on an 8052. On an 8051 these two
instructions would produce an undefined result since the 8051
only has 128 bytes of Internal RAM.
External Direct
External Memory is accessed using a suite of instructions which
use what I call "External Direct" addressing. I call it this
because it appears to be direct addressing, but it is used to
access external memory rather than internal memory.
There are only two commands that use External Direct
addressing mode:
MOVX A,@DPTR
MOVX @DPTR,A
As you can see, both commands utilize DPTR. In these
instructions, DPTR must first be loaded with the address of
external memory that you wish to read or write. Once DPTR
holds the correct external memory address, the first command
will move the contents of that external memory address into th e
Accumulator. The second command will do the opposite: it will
allow you to write the value of the Accumulator to the external
memory address pointed to by DPTR.
External Indirect
External memory can also be accessed using a form of indirect
addressing which I call External Indirect addressing. This form
30
of addressing is usually only used in relatively small projects
that have a very small amount of external RAM. An example of
this addressing mode is:
MOVX @R0,A
Once again, the value of R0 is first read and the value of the
Accumulator is written to that address in External RAM. Since
the value of @R0 can only be 00h through FFh the project would
effectively be limited to 256 bytes of External RAM. There are
relatively simple hardware/software tricks tha t can be
implemented to access more than 256 bytes of memory using
External Indirect addressing; however, it is usually easier to
use External Direct addressing if your project has more than
256 bytes of External RAM.
31
C Program :
#include <stdlib.h>
#include <conio.h>
#include <time.h>
#include <stdio.h>
#include <dos.h>
#include <bios.h>
#define COM1 0
#define COM_INIT 0
#define COM_SEND 1
#define COM_RECEIVE 2
#define COM_STATUS 3
#include <graphics.h>
int gdriver = DETECT, gmode, errorcode;
int status,c;
int midx, midy;
int stangle , endangle ;
int radius = 180;
int b,w,i,*ptr,maxx,x,maxy,*ptr1,j,x1,cnt,y1,x2,y2;
32
/* initialize graphics and local variables */
char m,n;
int main(void)
{
/* request auto detection */
initgraph(&gdriver, &gmode, "c: \\tc\\bgi ");
/* read result of initialization */
errorcode = graphresult();
/* an error occurred */
if (errorcode != grOk)
{
printf("Graphics
error:
grapherrormsg(errorcode));
%s\n",
printf("Press any key to halt:");
getch();
exit(1);
/* terminate with an error code */
}
setcolor(10);
settextstyle(4 , HORIZ_DIR, 0);
outtextxy(100,10," D.M. ") ;
setcolor(11);
clearviewport();
outtextxy(100,60," Project By") ;
outtextxy(100,90," Mr. Punit Thakkar") ;
outtextxy(100,120,"Mr. Mitesh Dave") ;
33
outtextxy(100,90," Ms. Darshini Desai") ;
getch();
clearviewport();
midx = getmaxx() / 2;
midy = getmaxy() / 2;
setcolor(14);
/*
data1 = 0xe3; */
bioscom(COM_INIT,0xe3,COM1);
outportb(0x3fc,0x3);
line(0,midy,2*midx,midy);
line(midx,0,midx,2*midy);
setcolor(10);
settextstyle(4 , HORIZ_DIR, 3);
outtextxy(0,0," D.M. ") ;
settextstyle(0 , HORIZ_DIR, 0);
setcolor(11);
outtextxy(0,60," Start Position Angle -") ;
outtextxy(0,90," End
Position Angle -") ;
outtextxy(0,120," Te mp-") ;
outtextxy(0,150,"Press m to s/w menu");
for(stangle=0,endangle=0;endangle<361;endangle=
endangle+1.8) //9
34
{
/* draw arc */
arc(midx, midy, stangle, endangle, radius);
setcolor(12);
setfillstyle(EMPTY_FILL,9);/* getma xcolor()); */
pieslice(midx, midy, stangle, endangle, radius);
itoa(stangle,ptr,10);
outtextxy(180,60,ptr);
itoa(endangle,ptr1,10);
outtextxy(180,90,ptr1);
getch();
// transmit trigger pulse
*/
do
{
status=inportb(0x3fd);
status=status&0x20;
}
while(!status);
c=0x54;
outportb(0x3f8,c);
/* receive temp value */
do
{
status=inportb(0x3fd);
status=status&0x1;
}
while(!status);
c=inportb(0x3f8);
35
/* /c=45;
*/
itoa(c,ptr,10);
outtextxy(90,120,ptr);
delay(1000);
b= getbkcolor();
w= getcolor();
setcolor(b);
outtextxy(90,120,ptr);
setcolor(w);
m= getch();
if(m!='m') goto bb1;
irobo:
settextstyle(1 , HORIZ_DIR, 3);
outtextxy(0,240,"Menu: ") ;
settextstyle(0 , HORIZ_DIR, 0);
setcolor(11);
outtextxy(0,330," 4: Left") ;
outtextxy(0,340," 6: Right") ;
outtextxy(0,350," 8: Forward") ;
outtextxy(0,360," 2: Backward") ;
outtextxy(0,370," b: Back") ;
outtextxy(0,380," q: quit") ;
outtextxy(0,390," 9: F - R") ;
outtextxy(0,400," 3: B - R") ;
outtextxy(0,410," 1: B - L") ;
36
outtextxy(0,420," 7: F - L") ;
bb2:
m=getch();
if(m=='b')
goto bb1;
if(m=='q')
exit(0);
if(m=='2')
{
outportb(0x378,0x1);
delay(1000);
outportb(0x378,0x0);
}
if(m=='1')
{
outportb(0x378,0x9);
delay(1000);
outportb(0x378,0x0);
}
if(m=='3')
{
outportb(0x378,0x3);
delay(1000);
outportb(0x378,0x0);
}
37
if(m=='7')
{
outportb(0x378,0xc);
delay(1000);
outportb(0x378,0x0);
}
if(m=='9')
{
outportb(0x378,0x6);
delay(1000);
outportb(0x378,0x0);
}
if(m=='8')
{
outportb(0x378,0x4);
delay(1000);
outportb(0x378,0x0);
}
if(m=='4')
{
outportb(0x378,0x8);
delay(1000);
outportb(0x378,0x0);
}
38
if(m=='6')
{
outportb(0x378,0x2);
delay(1000);
outportb(0x378,0x0);
}
delay(1000);
goto bb2;
bb1:
j=getcolor();
i=getbkcolor();
setcolor(i);
itoa(endangle,ptr1,10);
outtextxy(180,90,ptr1);
setcolor(j);
j=getcolor();
i=getbkcolor();
setcolor(i);
itoa(c,ptr1,10);
outtextxy(90,120,ptr1);
setcolor(j);
getch();
}
}
39
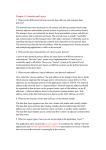
FLOWCHART ON TRANSMITTER SIDE :
START
INITIALIZE
TIMER
INITIALIZE
COM PORT
INITIALIZE
STACK
CONFIGURE
PORTS
READ ONE
CHANNEL
(TEMP)
GOTO TO
NEXT
Y
IS DATA
=
SET VAL
GET
TEMP
VALUE
POSITION
N
TRANSMIT DATA ON
RS232
REPEAT
PROCESS
40
FLOWCHART ON RECEIVER SIDE:
START
INITIALIZE GRAPHIC
CONTROLLER
DISPLAY THE
CHANNELS
INITIALIZE COM
PORTS
READ DATA FROM
RECEIVER
STORE
INTO
ARRAY
DISPLAY POSITION
STATUS
STORE
INFORMATION
41
G RA P H I C M O D E O F C LA N GU A G E
For
representing
the
data
in
graphical
form
through
C
language, we use the ' graphic.h' header fiIe of c library. To use
the
'graphic.h'
file,
we
use
the
command
as
"#
include<graphics.h>".In the graph ics mode to initialize the
modes, we can use the function "initgraph ( )".Also to check the
mode is available or not in the graphics, we can use the
function "detectgraph ( )".The mode is established by "initgraph
( )"function can be terminated by the func tion "closegraph( )".
Many functions are available in 'graphics.h' file of C such as
circle ( ), rectangle ( ), getmaxx ( ), getmaxy ( ), etc to use the
graphics mode efficiently.
C FUNCTIONS
I) #define (directive) -- Defines a macro
# d e f i n e < i d l > [ « i d 2 > , . . . )] < t o k e n - s t r i n g >
The
#define
directive
defines
a
macro.
Macros
provide
a
mechanism for token replacement with or without a set of formal,
function-line parameters.
All subsequent instances of the identifier <idl> in the source text
will be replaced by the text defined by <token -string>.
static (keyword)--Preserves variable value
static <data-definition>; OR static <function -definition>;
A function or data element is only known within the scope of the
current compile.
42
If you use the register keyw ord with a variable that is local to a
function, it allows the last value of the variable to be preserved
between successive calls to that function.
2) initgraph-- Initializes the graphics system.
Syntax:
void far initgraph (int far *graphdriver, intfar *graphmode, char far
*pathtodriyer);
Prototype in:
graphics.h
Initgraph initializes the graphics system by loading a graphics driver
from the disk ( or validating a registered driver) and putting the
system into graphics mode.
*graphdriver - is an integer that specifics the graphics driver to be
used. you can give it a value using a constant of the graphics_drivers
enumeration type
*graphmode- the (integer value) that specifies the initial graphics
mode
(unless
*graphdriver=DETECT)
if
graphdriver
=DETEC T,
initgraph sets *graphmode to the
highest resolution available for detected driver.
3) cIearviewport -- Clears the current viewport.
Syntax:
void far clearviewport(void);
Prototype in:
graphics.h
43
4) setcolor -- Sets the current drawing color.
Syntax:
void farsetcolor (int color);
Prototype in:
graphics.h
5) settextstyle--Sets the current text characteristics.
Syntax:
void far settextstyle (int font, int direction, int charsize);
Prototype in:
graphics.h
q) outtextxy--Displays a string at the specified location (graphics
mode).
Syntax:
void far outtextxy (int x, int y, char far *textstring);
Prototype in:
graphics.h
7) geteh and getche--Gets character from console, with echoing to
screen(getche), or without echoing to screen (getch).
Syntax:
int getch(void);
int getche(void);
8) bioscom
RS-232 communications I/O.
Syntax:
int bioscom(int cmd, char abyte, int port);
Prototype in:
bios.h
44
FOLLOWING ARE SOME OF THE ARGUMENTS USED:
abyte- combination of bits that specifies COM port settings (ign ored
id cmd= 2 or 3)
cmd- Specifies the I/O operation to perform
port- Identifies the I/O operation to perform
9) inportb --Reads a byte from hardware port.
Syntax:
unsigned char inportb(int portid);
Prototype in:
dos.h
p o r t i d - i n p o r t p o r t t h a t i n p o r t s &i n p o r t b r e a d s f r o m
10) outportb -- Outputs a byte to a hardware port.
Syntax:
void outportb (int portid, unsigned char value);
Prototype in:
dos.h
portid- outport port that outports & outportb reads from
11) closegraph - Shuts down the graphics system.
Syntax:
void far closegraph (void);
Prototype in:
graphics.h
12) cprintf- Writes formatted output to the tcxt window on the screen.
Syntax :
i n t c p r i n t f ( c o n s t c h a r * f o r m a t [ , a r g u m e n t , … …] ) ;
prototype in : conio.h
45
FUNCTIONS USED IN C PROGRAM:
1. "initgraph": It is placed under library GRAPHICS.h. It is used to
initialize the graphics system by loading the graphics driver from the
disk (or validating a registered driver), the putting the system into
graphics mode. It also resets all graphics settings. De claration:
initgraph (graphics driver)
2. "closegraph": It shuts down the graphics mode and restore the
scree"n in to the mode it was before" initgraph". The "closegraph"
deallocates
all
the
memory
allocated
by
the
graph
system.
Declaration: closegraph()
3. "setviewport": it sets the curr-ent view port of the current
graphics
output.
The
viewport
corners
all
absolute
screen
co -
ordinates by (left/top) and (right, bottom). In addition to a clip
parameter is also provided to determine whether the drawings ar e
clipped at the current viewpoint boundcrries. If clip is non -zero, all
drawings will
be clipped to the current
viewport. Declaration:
setviewport (left, top) and (right, bottom).
4. "clearviewport": it clears the current view port. It erases the
viewport and moves the current position (CP)to home(O,O) relative to
the cu rrent viewport()
5. "arc", "circle": thi,s function facilitates the drawing of circle arc
and circle in the current drawing colour. The arc function requires
the parameters such as cent er poent of the are, x,y; co -ordinates of
the position of the arc, start angle of the arc(stangle) and end
46
angle (endangle) of the arc. A function is specified in terms of three
paramaters namely X- co-ordinates Y - co-ordinates that speCifies its
position and the radius of circle. Declaration: circle(x,y,radius)
6. "delay": it suspects the execution for an interval specified in
milliseconds.
With a
call
to "delay"
,
the
current
program is
suspended from the execution for the time specified by the argument
in milliseconds. It is not necessary to make a calibration call to a
delay
before
using
it.
The
delay
is
accurate
0.1
millisecond.
Declaration: delay(time in milliseconds)
7. "line": it allows us to draw a line between two points. Such a
function has x, y co-ordinates of the two points as its parameters .an
extension of line function is :Iineto" function that enables us to draw
a line from the current position to the x, y, co -ordinates
specified. Declaration: Ii ne(xl, yl, x2,y2), lineto(x, y).
8. "'rectangle": it enables us to draw rectangle in current line style,
thickness and drawing colour. Such a function has four parameters as
its argument namely left, top, right, bottom. The (left, top) co ordinates from the upper left corner of rectangle while the (right,
bottom) co-ordinates form the lower corner of the rectangle.
Declaration: rectangle(left, top, right, bottom).
9. "outtext": it will output characters that are enclosed within
thequotation marks. Declaration: outtext(" text”).
10."getbkcolor
&
setbkcolor"
:
"getcolor"
returns
the
current
background color while "setbkcolor" sets the current background
color or by giving the number associated with the color. decleration:
setbkcolor(BLUE).
47
11."inport", "inportb", "outport", "outportb": "inport" reads a
word from a hardware port. "outport" outputs a word to the hardware
port. "outportb" outputs a byte to the har,dware port. The "inport"
and "outportb" have a ."portid" as their argument where "portid" is
the destination from where "inport", "inportb" wi ll read. Similarly
"outport", "outportb" write a word or a byte to the specified port.
"outport" writes the lower byte of te value to the lower byte of the
value to the lower portion of portid while it writ~s the higher byte of
value to the higher portion of the portid.
12. "setcolor" & "getcolor" : "setcolor" sets the current drawing
color while "getcolor" returns the current drawing color. To select a
drawing color one can 'pass either the color number or the equivalent
color
name.Declaration:
setcolor(
color
name)
color
name)
getcolor(color name).
13." settextstyle" :. it sets the characteristics of the current text
such as text font, direction in which the text is to be displayed i.e.
horizontal or vertical and the size of the characters. Such a functi on
has three parameters namely font, direction, character size as its
argument. A call to "settextstyle" affects all the text output by
"outtext" and "outtexty". The font name and their settings are defined
in GRAPHICS.h library.
Declaration:
settextstyle(font,direction,size).
48
Features
The unit developed by us has various features:
1) Compactness:
The unit is much more compact as the PCB is reduced to
almost one fourth of the original PCB. Thus it occupies less
desktop area.
2) Versatileness:
The switching unit developed by us is very versatile as you
can access any kind of load through it . You can even connect
desired no. of loads to it.
3) Flexibility:
Since it uses a micro -controller it offers lot of flexi bility to
the programmer for the programming purpose, as well as for
the user since it is user friendly.
4) Longer period of service:
Since the components used in the circuit are not
susceptible to rough handling, it offers a longer period of
service.
5) Less experience:
The PCB uses circuits that are very cheap. They are easily
accessible as their voltage & power requirement is less. These
circuits are easy to troubleshoot, and so their voltage and so
their maintenance cost is also low. So it is affordable by a
common man also.
6) Easy availability :
The components is used in the circuit are easily
available in the market. The components are also replaceable
since IC pads are used.
49
APPLICATIONS
50
A p p l i c at i on s :
The “ Embedded System Based Disaster M anagement” has a
wide range of applications . The main objective of this unit is to
detect the live human body via a
sensor that detects the
temperature of the living being. Here a has bein g used. The key
aspect beyond using a wireless vehicle is that one access the
damaged site from a remote area. It is applicable in the
following areas:
1.Disaster Management :
In the current project it is used to
detect living beings by detecting th e temperature of the living
being ( around 37o C ). It is mainly used when natural disasters
like earthquake strikes.
2.Space applications :
It can be used for space exploration
to determine various properties of heavenly bodies , as in, the
MARS ROVER.
51
MERITS & DEMERITS
52
Merits:
1. It uses very less components and power consumption is
low its cost is very less.
2. Feedback is received in form system this helps in carrying
out rescue operation quickly.
3. Instant switching is done without any delay.
4. It has no distance limitation if wireless data transmission
is used.
Demerits :
1. The unit cannot be accessed when the vehicle is dead.
2. T h e p r o j e c t u s e s s e r i a l p o r t f o r t r a n s m i s s i o n o f d a t a w h i c h
is a wired link hence there is distance limitation .
53
Future Expansion:
Although our circuit is very sophisticated, complete and
precise but still to provide more flexibility to the user some
provision should be included in our unit which includes:
Wireless Link for transmission and reception:
Wireless link can used for transmission and reception of data
which can indeed be multiplexed and transmitted while
controlling the vehicle wirelessly, thus elimi nating the use of
serial transmission and hence the system can become distance
independent.
Additional Application :
The system may also include a camera along with the sensor
module which can be controlled to provide visual display. This
may be included as an additional application.
54
TESTING
AND
MEASURING
55
T e st i n g an d T r oub l e - s h o ot i n g
Before checking whether the circuit is working or not we tested
it part by part. First of all we tested the components
individually using digital meter, LCR -Q meter and IC tester.
After testing the components we tested :
Relay circuit:
The relays were checked by giving each an external 12V DC
supply . Further its outputs i.e. NO & NC conditions were
checked using a multi-meter.
Trouble-shooting :
Trouble-shooting began at very first stage after designing
the PCB, which contained many open and short paths, which
were checked with the help of a multi -meter and were then
rectified as required.
After soldering, the soldering was not found up to the
mark and we found number of short paths, which were then
corrected one by one.
As expected the circuit did not function in the intended
manner, which actually began the real trouble -shooting. It was
found that some components were damaged due to over heating
and improper soldering.
56
Bibliography
57
SR.NO
AUTHOR
TITLE
OF EDITION
PUBLISHER
BOOK
1.
2.
Bossard
PCB Layout & 3rd
Tata Mc Graw
Designing
Hill
Let us C
4th
Bpb
Kenneth
8051
3rd
Tata Mc Graw
Ayala
Architecture
Yashwant
Kanetkar
3.
4.
Stephen
Kochan
G. Programming
Hill
2nd
in C
CBS
Publishers
&
Distributors
Along with the above reference books the following sites were also referred:
Rs232c - website www.maxsion.com
Batteries - website www.exide.com
89c51_MicrocontroJler - website www.atmel.com
Some forums:
www.edaboard.com
www.electronics-lab.com/forum/index.html
my.integritynet.com.au/purdic/
58
59
60