Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
The Annals of Statistics
2006, Vol. 34, No. 4, 1581–1619
DOI: 10.1214/009053606000000515
© Institute of Mathematical Statistics, 2006
DISCUSSION PAPER
EQUI-ENERGY SAMPLER WITH APPLICATIONS IN STATISTICAL
INFERENCE AND STATISTICAL MECHANICS1,2,3
B Y S. C. KOU , Q ING Z HOU AND W ING H UNG W ONG
Harvard University, Harvard University and Stanford University
We introduce a new sampling algorithm, the equi-energy sampler, for
efficient statistical sampling and estimation. Complementary to the widely
used temperature-domain methods, the equi-energy sampler, utilizing the
temperature–energy duality, targets the energy directly. The focus on the
energy function not only facilitates efficient sampling, but also provides a
powerful means for statistical estimation, for example, the calculation of the
density of states and microcanonical averages in statistical mechanics. The
equi-energy sampler is applied to a variety of problems, including exponential
regression in statistics, motif sampling in computational biology and protein
folding in biophysics.
1. Introduction. Since the arrival of modern computers during World War II,
the Monte Carlo method has greatly expanded the scientific horizon to study complicated systems ranging from the early development in computational physics to
modern biology. At the heart of the Monte Carlo method lies the difficult problem
of sampling and estimation: Given a target distribution, usually multidimensional
and multimodal, how do we draw samples from it and estimate the statistical quantities of interest? In this article, we attempt to introduce a new sampling algorithm,
the equi-energy sampler, to address the problem. Since the Monte Carlo method
began from calculations in statistical physics and mechanics, to introduce the equienergy sampler, we begin from statistical mechanics.
The starting point of a statistical mechanical computation is the energy function
or Hamiltonian h(x). According to Boltzmann and Gibbs, the distribution of a
system in thermal equilibrium at temperature T is described by the Boltzmann
distribution,
1
pT (x) =
exp −h(x)/T ,
(1)
Z(T )
Received June 2004; revised March 2005.
1 Supported in part by NSF, NIH and Harvard University Clarke–Cooke Fund.
2 Discussed in 10.1214/009053606000000470, 10.1214/009053606000000489,
10.1214/009053606000000498 and 10.1214/009053606000000506; rejoinder at
10.1214/009053606000000524.
3 S. C. Kou and Qing Zhou contributed equally to this work.
AMS 2000 subject classifications. Primary 65C05; secondary 65C40, 82B80, 62F15.
Key words and phrases. Sampling, estimation, temperature, energy, density of states, microcanonical distribution, motif sampling, protein folding.
1581
1582
S. C. KOU, Q. ZHOU AND W. H. WONG
where Z(T ) = x exp(−h(x)/T ) is referred to as the partition function. For any
state function g(x), its expectation µg (T ) with respect to the Boltzmann distribution is called its Boltzmann average, also known as the thermal average in the
physics literature,
(2)
µg (T ) =
g(x) exp −h(x)/T /Z(T ).
x
To study the system, in many cases we are interested in using Monte Carlo simulation to obtain estimates of Boltzmann averages as functions of temperature for
various state functions. In addition to Boltzmann averages, estimating the partition function Z(T ), which represents the dependency of the normalization factor
in (1) as a function of temperature, is also of significant interest, as it is well known
that many important thermodynamic quantities, such as free energy, specific heat,
internal energy and so on, can be computed directly from the partition function
(see Section 4). The fundamental algorithm for computing Boltzmann averages is
due to Metropolis et al. [29], who proposed the use of a reversible Markov chain
constructed in such a way so as to guarantee that its stationary distribution is the
Boltzmann distribution (1). Later, this algorithm was generalized by Hastings [11]
to allow the use of an asymmetric transition kernel. Given a current state x, this
Metropolis–Hastings algorithm generates a new state by either reusing the current state x or moving to a new state y drawn from a proposal kernel K(x → y).
The proposal state y is accepted with probability min(1, MR) where MR is the
Metropolis–Hastings ratio pT (y)K(y → x)/pT (x)K(x → y). The algorithm in
this way generates a Markov
chain Xi , i = 1, . . . , n. Under ergodic conditions [39],
the time average n−1 ni=1 g(Xi ) provides a consistent estimate of the Boltzmann
average (2).
The Metropolis algorithm, however, can perform poorly if the energy function
has many local minima separated by high barriers that cannot be crossed by the
proposal moves. In this situation the chain will be trapped in local energy wells and
will fail to sample the Boltzmann distribution correctly. To overcome this problem
one can design specific moves that have a higher chance to cut across the energy
barrier (e.g., the conditional sampling moves in Gibbs sampling) or to add auxiliary
variables so that the energy wells become connected by the added dimension (e.g.,
the group Ising updating of Swendsen and Wang [37], or the data-augmentation
technique of Tanner and Wong [38]). However, these remedies are problemspecific and may or may not work for any given problem. A breakthrough occurred
with the development of the parallel tempering algorithm by Geyer [8] (also called
exchanged Monte Carlo; Hukushima and Nemoto [13]). The idea is to perform
parallel Metropolis sampling at different temperatures. Occasionally one proposes
to exchange the states of two neighboring chains (i.e., chains with adjacent temperature levels). The acceptance probability for the exchange is designed to ensure
that the joint states of all the parallel chains evolve according to the Metropolis–
Hastings rule with the product distribution (i.e., the product of the Boltzmann distributions at the different temperatures) as the target distribution. Geyer’s initial
EQUI-ENERGY SAMPLER
1583
objective was to use the (hopefully) faster mixing of the high-temperature chains
to drive the mixing of the whole system, thereby to achieve faster mixing at the
low-temperature chain as well. It is clear that parallel tempering can provide estimates of Boltzmann averages at the temperatures used in the simulation. Marinari
and Parisi [27] developed simulated tempering that uses just a single chain but augments the state by a temperature variable that is dynamically moved up or down
the temperature ladder. These authors further developed the theory of using the
samples in the multiple temperatures to construct estimates of the partition function, and to investigate phase transition. In the meantime, Geyer [9] also proposed
a maximum likelihood approach to estimate the ratios of normalization constants
and hence obtain information on the partition function at the selected temperatures.
In contrast to the statistical mechanical computations, the starting point in statistical inference is usually one given distribution, for example, the distribution on
a high-dimensional parameter space. If we take the energy to be the negative logdensity function in this case, we are then interested in obtaining the Boltzmann
average only at T = 1. The Metropolis and related algorithms have been developed and applied to solve many statistical computation problems, and have greatly
enhanced our ability to analyze problems ranging from image analysis to missing
value problems to biological sequence analysis to single-molecule chemistry [6,
7, 17, 20, 22, 38]. However, as Geyer, Marinari, Parisi and others have pointed
out, even if the immediate interest is at T = 1, simulation at temperatures other
than T = 1 is often necessary in order to achieve efficient sampling. Furthermore,
computing the normalization constants (i.e., partition function) is also important
in statistical tasks such as the determination of likelihood ratios and Bayes factors
[9, 10, 28].
It is thus seen that historically dynamic Monte Carlo methods were developed
to simulate from the Boltzmann distribution at fixed temperatures. These methods aim to provide direct estimates of parameters such as Boltzmann averages and
partition functions, which are functions of temperature. We hence refer to these
methods as temperature-domain methods. The purpose of this article is to develop
an alternative sampling and estimation approach based on energy-domain considerations. We will construct algorithms for the direct estimation of parameters such
as microcanonical averages and density of states (see Section 2) that are functions
of energy. We will see in Section 2 that there is a duality between temperaturedomain functions and energy-domain functions, so that once we have obtained
estimates of the density of states and microcanonical averages (both are energydomain functions), we can easily transfer to the temperature domain to obtain the
partition function and the Boltzmann averages. In Section 3 we introduce the equienergy sampler (EE sampler), which, targeting energy directly, is a new Monte
Carlo algorithm for the efficient sampling from multiple energy intervals. In Sections 4 and 5 we explain how to use these samples to obtain estimates of density of
states and microcanonical averages, and how to extend the energy-domain method
1584
S. C. KOU, Q. ZHOU AND W. H. WONG
to estimate statistical quantities in general. In Section 6 we illustrate the wide applicability of this method by applying the equi-energy sampler and the estimation
methods to a variety of problems, including an exponential regression problem, the
analysis of regulatory DNA motifs and the study of a simplified model for protein
folding. Section 7 concludes the article with discussion and further remarks.
2. Energy–temperature duality. The Boltzmann law (1) implies that the
conditional distribution of the system given its energy h(x) = u is the uniform
distribution on the equi-energy surface {x : h(x) = u}. In statistical mechanics, this
conditional distribution is referred to as the microcanonical distribution given energy u. Accordingly, the conditional expectation of a state function g(x) given an
energy level u is called its microcanonical average:
(3)
νg (u) = E g(X)|h(X) = u .
Note that (3) is independent of the temperature T used in the Boltzmann
distribution for X. Suppose that the infinitesimal volume of the energy slice
{x : h(x) ∈ (u, u + du)} is approximately equal to (u) du. This function (u)
is then called the density of states function. If the state space is discrete, then we
replace the volume by counts, in which case (u) is simply the number of states
with the energy equal to u. Without loss of generality, we assume that the minimum energy of the system umin = 0. The following result follows easily from these
definitions.
L EMMA 1. Let β = 1/T denote the inverse temperature so that the Boltzmann
averages and partition function are indexed by β as well as by T ; then
µg (β −1 )Z(β −1 ) =
∞
0
νg (u)(u)e−βu du.
In particular, the partition function Z(β −1 ) and the density of states (u) form a
Laplace transform pair.
This lemma suggests that the Boltzmann averages and the partition function can
be obtained through Monte Carlo algorithms designed to compute the density of
states and microcanonical averages. We hence refer to such algorithms as energydomain algorithms.
The earliest energy-domain Monte Carlo algorithm is the multicanonical algorithm due to Berg and Neuhaus [2], which aims to sample from a distribution flat
in the energy domain through an iterative estimation updating scheme. Later, the
idea of iteratively updating the target distribution was generalized to histogram
methods (see [18, 40] for a review). The main purpose of these algorithms is to
obtain the density of states and related functions such as the specific heat. They do
not directly address the estimation of Boltzmann averages.
EQUI-ENERGY SAMPLER
1585
In this article we present a different method that combines the use of multiple energy ranges, multiple temperatures and step sizes, to produce an efficient
sampling scheme capable of providing direct estimates of all microcanonical averages as well as the density of states. We do not use iterative estimation of density
of states as in the multicanonical approach; instead, the key of our algorithm is
a new type of move called the equi-energy jump that aims to move directly between states with similar energy (see the next section). The relationship between
the multicanonical algorithm and the equi-energy sampler will be discussed further
in Section 7.
3. The equi-energy sampler.
3.1. The algorithm. In Monte Carlo statistical inference one crucial task is to
obtain samples from a given distribution, often known up to a normalizing constant. Let π(x) denote the target distribution and let h(x) be the associated energy
function. Then π(x) ∝ exp(−h(x)). For simple problems, the famous Metropolis–
Hastings (MH) algorithm, which employs a local Markov chain move, could work.
However, if π(x) is multimodal and the modes are far away from each other, which
is often the case for practical multidimensional distributions, algorithms relying on
local moves such as the MH algorithm or the Gibbs sampler can be easily trapped
in a local mode indefinitely, resulting in inefficient and even unreliable samples.
The EE sampler aims to overcome this difficulty by working on the energy
function directly. First, a sequence of energy levels is introduced:
(4)
H0 < H1 < H2 < · · · < HK < HK+1 = ∞,
such that H0 is below the minimum energy, H0 ≤ infx h(x). Associated with the
energy levels is a sequence of temperatures
1 = T0 < T1 < · · · < TK .
The EE sampler considers K + 1 distributions, each indexed by a temperature and
an energy truncation. The energy function of the ith distribution πi (0 ≤ i ≤ K)
is hi (x) = T1i (h(x) ∨ Hi ), that is, πi (x) ∝ exp(−hi (x)). For each i, a sampling
chain targeting πi is constructed. Clearly π0 is the initial distribution of interest.
The EE sampler employs the other K chains to overcome local trapping, because
for large i the energy truncation and the high temperature on hi (x) flatten the distribution πi (x), making it easier to move between local modes. The quick mixing
of chains with large i is utilized by the EE sampler, through a step termed the equienergy jump, to help sampling from πi with small i, where the landscape is more
rugged.
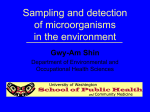
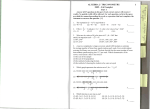
The equi-energy jump, illustrated in Figure 1, aims to directly move between
states with similar energy levels. Intuitively, if it can be implemented properly in
a sampling algorithm, it will effectively eliminate the problem of local trap. The
1586
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 1. Illustration of the equi-energy jump, where the sampler can jump freely between the states
with similar energy levels.
fact that the ith energy function hi (x) is monotone in h(x) implies that, above
the truncation values, the equi-energy sets Si (H ) = {x : hi (x) = H } are mutually
consistent across i. Thus once we have constructed an empirical version of the
equi-energy sets at high-order πi (i.e., πi with large i), these high-order empirical
sets will remain valid at low-order πi . Therefore, after the empirical equi-energy
sets are first constructed at high order πi , the local trapping at low-order πi can
be largely evaded by performing an equi-energy jump that allows the current state
to jump to another state drawn from the already constructed high-order empirical
equi-energy set that has energy level close to the current state. This is the basic idea
behind the EE sampler. We will refer to the empirical equi-energy sets as energy
rings hereafter.
To construct the energy
rings, the state space X is partitioned according to the
energy levels, X = K
D
j =0 j , where Dj = {x : h(x) ∈ [Hj , Hj +1 )}, 0 ≤ j ≤ K,
are the energy sets, determined by the energy sequence (4). For any x ∈ X, let
I (x) denote the partition index such that I (x) = j , if x ∈ Dj , that is, if h(x) ∈
[Hj , Hj +1 ).
The EE sampler begins from an MH chain X (K) targeting the highest-order distribution πK . After an initial burn-in period, the EE sampler starts constructing the
(K)
Kth-order energy rings D̂j by grouping the samples according to their energy
levels; that is, D̂j(K) consists of all the samples Xn(K) such that I (Xn(K) ) = j . After
the chain X (K) has been running for N steps, the EE sampler starts the second
highest-order chain X (K−1) targeting πK−1 , while it keeps on running X (K) and
(K)
updating D̂j (0 ≤ j ≤ K). The chain X (K−1) is updated through two operations: the local move and the equi-energy jump. At each update a coin is flipped;
with probability 1 − pee the current state Xn(K−1) undergoes an MH local move
(K−1)
(K−1)
goes through an
to give the next state Xn+1 , and with probability pee , Xn
equi-energy jump. In the equi-energy jump, a state y is chosen uniformly from the
1587
EQUI-ENERGY SAMPLER
(K)
highest-order energy ring D̂j
(K−1)
indexed by j = I (Xn
) that corresponds to the
(K−1)
(K−1)
energy level of Xn
[note that y and Xn
have similar energy level, since
(K−1)
I (y) = I (Xn
) by construction]; the chosen y is accepted to be the next state
(K−1)
(K−1)
(K−1)
)
K (Xn
Xn+1 with probability min(1, πK−1 (y)π
); if y is not accepted, Xn+1
(K−1)
πK−1 (Xn
)πK (y)
keeps the old value Xn(K−1) . After a burn-in period on X (K−1) , the EE sampler
starts the construction of the second highest-order [i.e., (K − 1)st order] energy
rings D̂j(K−1) in much the same way as the construction of D̂j(K) , that is, collecting the samples according to their energy levels. Once the chain X (K−1) has been
running for N steps, the EE sampler starts X (K−2) targeting πK−2 while it keeps
on running X (K−1) and X (K) . Like X (K−1) , the chain X (K−2) is updated by the
local MH move and the equi-energy jump with probabilities 1 − pee and pee , respectively. In the equi-energy jump, a state y uniformly chosen from D̂ (K−1)
(K−2) ,
where
(K−2)
Xn
is the current state, is accepted to be the next state
(K−2)
probability min(1,
πK−2 (y)πK−1 (Xn
)
).
(K−2)
πK−2 (Xn
)πK−1 (y)
I (Xn
(K−2)
Xn+1
)
with
The EE sampler thus successively moves
down the energy and temperature ladder until the distribution π0 is reached. Each
chain X (i) , 0 ≤ i < K, is updated by the equi-energy jump and the local MH move;
the equi-energy move proposes a state y uniformly chosen from the energy ring
D̂
(i+1)
(i)
I (Xn )
(i)
i+1 (Xn )
and accepts the proposal with probability min(1, πi (y)π
). At each
(i)
πi (Xn )πi+1 (y)
X (i) ,
(i)
D̂j
chain
the energy rings
are constructed after a burn-in period, and will
(i−1)
be used for chain X
in the equi-energy jump. The basic sampling scheme can
be summarized as follows.
The algorithm of the EE sampler
(i)
Assign
an initial value and set D̂j = ∅ for all i and j
For n = 1, 2, . . .
For i = K downto 0
if n > (K − i)(B + N) do
(* B is the burn-in period, and N is the
period to construct initial energy rings *)
(i+1)
if i = K or if D̂ (i) = ∅ do
(i)
X0
I (Xn−1 )
(i)
with
perform an MH step on Xn−1
target distribution πi to obtain Xn(i)
else
with probability 1 − pee , perform an MH step
(i)
(i)
on Xn−1 targeting πi to obtain Xn
(i+1)
with probability pee , uniformly pick a state y from D̂ (i)
I (Xn−1 )
and let
1588
S. C. KOU, Q. ZHOU AND W. H. WONG
Xn(i) ← y with prob min(1,
(i)
(i)
πi (y)πi+1 (Xn−1 )
(i)
πi (Xn−1 )πi+1 (y)
);
(i)
Xn ← Xn−1 with the remaining prob.
endif
if n > (K − i)(B + N) + B do
(i)
(i)
(i)
D̂ (i) ← D̂ (i) + {Xn }
I (Xn )
I (Xn )
(* add the sample to the energy rings after the burn-in period *)
endif
endif
endfor
endfor
The idea of moving along the equi-energy surface bears a resemblance to the
auxiliary variable approach, where to sample from a target distribution π(x), one
can iteratively first sample an auxiliary variable U ∼ Unif[0, π(X)], and then
sample X ∼ Unif{x : π(x) ≥ U }. This approach has been used by Edwards and
Sokal [5] to explain the Swendsen–Wang [37] clustering algorithm for Ising model
simulation, and by Besag and Green [3] and Higdon [12] on spatial Bayesian computation and image analysis. Roberts and Rosenthal [32], Mira, Moller and Roberts
[30] and Neal [31] provide further discussion under the name of slice sampling.
Under our setting, this auxiliary variable (slice sampler) approach amounts to sampling from the lower-energy sets. In comparison, the EE sampler’s focus on the
equi-energy set is motivated directly from the concept of microcanonical distribution in statistical mechanics. More importantly, the equi-energy jump step in the
EE sampler offers a practical means to carry out the idea of moving along the energy sets (or moving horizontally along the density contours), and thus provides an
effective way to study not only systems in statistical mechanics, but also general
statistical inference problems (see Sections 4, 5 and 6).
3.2. The steady-state distribution. With help from the equi-energy jump to
address the local trapping, the EE sampler aims to efficiently draw samples from
the given distribution π (which is identical to π0 ). A natural question is then: In
the long run, will the EE samples follow the correct distribution?
The following theorem shows that the steady-state distribution of chain X (i) is
indeed πi ; in particular, the steady-state distribution of X (0) is π0 = π .
T HEOREM 2. Suppose (i) the highest-order chain X(K) is irreducible and ape(i)
of X (i) connects
riodic, (ii) for i = 0, 1, . . . , K − 1, the MH transition kernel TMH
adjacent energy sets in the sense that for any j there exist sets A1 ⊂ Dj , A2 ⊂ Dj ,
B1 ⊂ Dj −1 and B2 ⊂ Dj +1 with positive measure such that the transition probabilities
(i)
TMH (A1 , B1 ) > 0,
(i)
TMH (A2 , B2 ) > 0
1589
EQUI-ENERGY SAMPLER
(i)
and (iii) the energy set probabilities pj = Pπi (X ∈ Dj ) > 0 for all i and j . Then
X (i) is ergodic with πi as its steady-state distribution.
P ROOF. We use backward induction to prove the theorem.
For i = K, X (K) simply follows the standard MH scheme. The desired conclusion thus follows from the fact that X (K) is aperiodic and irreducible.
Now assume the conclusion holds for the (i + 1)st order chain, that is, assume
X (i+1) is ergodic with steady-state distribution πi+1 . We want to show that the
conclusion also holds for X (i) . According to the construction of the EE sampler, if
(i)
(i)
at the nth step Xn = x, then at the next step with probability 1 − pee Xn+1 will
(i)
(i)
be drawn from the transition kernel TMH
(x, ·), and with probability pee Xn+1
will
(i+1)
be equal to a y from D̂I (x) with probability
(i)
P Xn+1 = y =
1
|D̂I(i+1)
(x) |
min 1,
πi (y)πi+1 (x)
,
πi (x)πi+1 (y)
(i+1)
y ∈ D̂I (x) .
Therefore for any measurable set A, the conditional probability
(i)
P Xn+1
∈ A|Xn(i) = x, X (i+1)
(i)
= (1 − pee )TMH
(x, A)
+ pee
|D̂I(i+1)
(x) |
+ pee 1 −
1
I (y ∈ A) min 1,
(i+1)
y∈D̂I (x)
1
(i+1)
|D̂I (x) |
πi (y)πi+1 (x)
πi (x)πi+1 (y)
πi (y)πi+1 (x)
min 1,
πi (x)πi+1 (y)
(i+1)
I (x ∈ A).
y∈D̂I (x)
Using the induction assumption of the ergodicity of X (i+1) and also the fact that
the lower-order chain X (i) does not affect the higher-order chain X (i+1) , we have,
as n → ∞,
(i)
P Xn+1
∈ A|Xn(i) = x
=
=
(5)
(i)
P Xn+1 ∈ A|Xn(i) = x, X (i+1) dP X (i+1) |Xn(i) = x
(i)
P Xn+1
∈ A|Xn(i) = x, X (i+1) dP X (i+1)
(i)
→ (1 − pee )TMH (x, A)
1
πi (y)πi+1 (x)
+ pee (i+1)
πi+1 (y) min 1,
dy
πi (x)πi+1 (y)
pI (x) y∈A∩DI (x)
+ pee 1 −
1
pI(i+1)
(x)
πi (y)πi+1 (x)
πi+1 (y) min 1,
dy I (x ∈ A).
πi (x)πi+1 (y)
y∈DI (x)
1590
S. C. KOU, Q. ZHOU AND W. H. WONG
Similarly, as n → ∞, the difference
(i)
(i)
(i)
∈ A|Xn(i) = x, Xn−1
, . . . , X1(i) − P Xn+1
∈ A|Xn(i) = x → 0.
P Xn+1
Now let us define a new transition kernel S (i) (x, ·), which undergoes the tran(i)
sition TMH
(x, ·) with probability 1 − pee , and with probability pee undergoes an
1
πi+1 (y)I (y ∈ DI (x) ), that
MH transition with the proposal density q(x, y) = (i+1)
pI (x)
is, πi+1 (y) confined to the energy set DI (x) . We then note that the right-hand side
of (5) corresponds exactly to the transition kernel S (i) (x, ·). Therefore, under the
induction assumption, X (i) is asymptotically equivalent to a Markovian sequence
governed by S (i) (x, ·).
(i)
Since the kernel TMH
(x, ·) connects adjacent energy sets and the proposal
q(x, y) connects points in the same equi-energy set, it follows from Chapman–
Kolmogorov and 0 < pee < 1 that S (i) (x, ·) is irreducible. S (i) (x, ·) is also aperiodic because the proposal q(x, y) has positive probability to leave the configuration x staying the same.
Since S (i) (x, ·) keeps πi as the steady-state distribution, it finally follows
from the standard Markov chain convergence theorem and the asymptotic equivalence (5) that X (i) is ergodic with πi as its steady-state distribution. The proof is
thus terminated. (i)
R EMARK 3. The assumption (ii) is weaker than assuming that TMH is irreducible for i = 0, 1, . . . , K − 1, because we can see that essentially the function of
the MH local move is to bridge adjacent energy sets, while the equi-energy jump
allows jumps within an equi-energy set.
3.3. Practical implementation. There are some flexibilities in the practical implementation of the EE sampler. We provide some suggestions based on our own
experience.
1. The choice of the temperature and energy ladder.
Given the lowest and second highest energy levels H0 and HK , we found
that setting the other energy levels by a geometric progression, or equivalently
setting log(Hi+1 − Hi ) to be evenly spaced, often works quite well. The temperature could be chosen such that (Hi+1 − Hi )/Ti ≈ c, and we found that
c ∈ [1, 5] often works well.
2. The choice of K, the number of temperature and energy levels.
The choice of K depends on the complexity of the problem. More chains and
energy levels are usually needed if the target distribution is high-dimensional
and multimodal. In our experience K could be roughly proportional to the dimensionality of the target distribution.
3. The equi-energy jump probability pee .
In our experience taking pee ∈ [5%, 30%] often works quite well. See Section 3.4 for more discussion.
1591
EQUI-ENERGY SAMPLER
4. Self-adaptation of the MH-proposal step size.
As the order i increases, the distribution πi becomes more and more flat.
Intuitively, to efficiently explore a flat distribution, one should use a large step
size in the MH proposal, whereas for a rough distribution, the step size has to be
small. Therefore, in the EE sampler each chain X (i) should have its own step
size in the local MH exploration. In practice, however, it is often difficult to
choose the right step sizes in the very beginning. One can hence let the sampler
tune by itself the step sizes. For each chain, the sampler can from time to time
monitor the acceptance rate in the MH local move, and increase (decrease) the
step size by a fixed factor, if the acceptance rate is too high (low). Note that in
this self-adaptation the energy-ring structure remains unchanged.
5. Adjusting the energy and temperature ladder.
In many problems, finding a close lower bound H0 for the energy function
h(x) is not very difficult. But in some cases, especially when h(x) is difficult
to optimize, one might find during the sampling that the energy value at some
state is actually smaller than the pre-assumed lower bound H0 . If this happens,
we need to adjust the energy ladder and the temperatures, because otherwise
the energy sets Dj would not have the proper sizes to cover the state space,
which could affect the sampling efficiency. The adjustment can be done by
dynamically monitoring the sampler. Suppose after the ith chain X (i) is started,
but before the (i − 1)st chain gets started, we find that the lowest energy value
Hmin reached so far is smaller than H0 . Then we first reset H0 = Hmin − β,
where the constant β > 0, say β = 2. Next given Hi and the new H0 we reset
the in-between energy levels by a geometric progression, and if necessary add
in more energy levels between H0 and Hi (thus adding more chains) so that
the sequence Hj +1 − Hj is still monotone increasing in j . The temperatures
between T0 = 1 and Ti are reset by (Hj +1 − Hj )/Tj ≈ c. With the energy
ladder adjusted, the samples are regrouped to new energy rings. Note that since
the chains X (K) , X (K−1) , . . . , X(i) have already started, we do not change the
values of HK , . . . , Hi and TK , . . . , Ti , so that the target distributions πK , . . . , πi
are not altered.
3.4. A multimodal illustration. As an illustration, we consider sampling from
a two-dimensional normal mixture model taken from [23],
(6)
20
wi
1
exp − 2 (x − µi ) (x − µi ) ,
f (x) =
2
2σi
i=1 2πσi
where σ1 = · · · = σ20 = 0.1, w1 = · · · = w20 = 0.05, and the 20 mean vectors
(µ1 , µ2 , . . . , µ20 ) =
2.18 8.67 4.24 8.41 3.93 3.25 1.70
,
,
,
,
,
,
,
5.76 9.59 8.48 1.68 8.82 3.47 0.50
4.59 6.91 6.87 5.41 2.70 4.98 1.14
,
,
,
,
,
,
,
5.60 5.81 5.40 2.65 7.88 3.70 2.39
1592
S. C. KOU, Q. ZHOU AND W. H. WONG
8.33 4.93 1.83 2.26 5.54 1.69
.
,
,
,
,
,
9.50 1.50 0.09 0.31 6.86 8.11
Since most local modes are more than 15 standard deviations away from the nearest ones [see Figure 2(a)], this mixture distribution poses a serious challenge for
sampling algorithms, and thus serves as a good test. We applied the EE sampler to
this problem. Since the minimum value of the energy function h(x) = − log(f (x))
5
) = 0.228, we took H0 = 0.2. K was set to 4, so only five
is around − log( 2π
chains were employed. The energy levels H1 , . . . , H4 were set by a geometric progression in the interval [0, 200]. The settings for energy levels and temperature
ladders are tabulated in Table 1. The equi-energy jump probability pee was taken
to be 0.1. The initial states of the chains X (i) were drawn uniformly from [0, 1]2 , a
region far from the centers µ1 , µ2 , . . . , µ20 , so as to make the sampling challeng(i)
ing. The MH proposal is taken to be bivariate Gaussian: Xn+1
∼ N2 (Xn(i) , τi2 I2 ),
where the √
initial MH proposal step size τi for the ith order chain X (i) was taken
to be 0.25 Ti . The step size was finely tuned later in the algorithm such that the
acceptance ratio was in the range (0.22, 0.32). After a burn-in period, each chain
was run for 50,000 iterations. Figure 2 shows the samples generated in each chain:
With the help of the higher-order chains, where the distributions are more flat, all
the modes of the target distribution were successfully visited by X (0) . The number
of samples in each energy ring is reported in Table 1. One can see that for loworder chains the samples are mostly concentrated in the low-energy rings, while
for high-order chains more samples are distributed in the high-energy rings.
As a comparison, we also applied parallel tempering (PT) [8] to this problem.
The PT procedure also adopts a temperature ladder; it uses a swap between neighboring temperature chains to help the low-temperature chain move. We ran the PT
to sample from (6) with the same parameter and initialization setting. The step
size of PT was tuned to make the acceptance ratio of the MH move between 0.22
and 0.32. The exchange (swap) probability of PT was taken to be 0.1 to make it
comparable with pee = 0.1 in the EE sampler, and in each PT exchange operation, K = 4 swaps were proposed to exchange samples in neighboring chains. The
TABLE 1
Sample size of each energy ring
Energy rings
Chain
< 2.0
[2.0, 6.3)
[6.3, 20.0)
[20.0, 63.2)
≥ 63.2
X (0) , T0 = 1
X (1) , T1 = 2.8
X (2) , T2 = 7.7
X (3) , T3 = 21.6
X (4) , T4 = 60.0
41631
21118
7686
3055
1300
8229
23035
16285
6470
2956
140
5797
22095
17841
8638
0
50
3914
20597
20992
0
0
20
2037
16114
EQUI-ENERGY SAMPLER
1593
F IG . 2. Samples generated from each chain of the EE sampler. The chains are sorted in ascending
order of temperature and energy truncation.
1594
S. C. KOU, Q. ZHOU AND W. H. WONG
overall acceptance rates for the MH move in the EE sampler and parallel tempering were 0.27 and 0.29, respectively. In the EE sampler, the acceptance rate for the
equi-energy jump was 0.82, while the acceptance rate for the exchange operation
in PT was 0.59. Figure 3(a) shows the path of the last 2000 samples in X (0) for
the EE sampler, which visited all the 20 components frequently; in comparison PT
only visited 14 components in the same number of samples [Figure 3(b)]. As a further test, we ran the EE sampler and the PT 20 times independently, and sought to
estimate the mean vector (EX1 , EX2 ) and the second moment (EX12 , EX22 ) using
the samples generated from the target chain X (0) . The results are shown in Table 2
(the upper half ). It is clear that the EE sampler provided more accurate estimates
with smaller mean squared errors.
To compare the mixing speed for the two sampling algorithms, we counted in
each of the 20 runs how many times the samples visited each mode in the last 2000
iterations. We then calculated the absolute frequency error for each mode, erri =
|fˆi − 0.05|, where fˆi is the sample frequency of the ith mode (i = 1, . . . , 20) being
visited. For each mode i, we calculated the median and the maximum of erri over
the 20 runs. Table 3 reports, for each mode, the ratio R1 of the median frequency
error of PT over that of EE, and the ratio R2 of the maximum frequency error of PT
over the corresponding value of EE. A two- to fourfold improvement by EE was
observed. We also noted that EE did not miss a single mode in all runs, whereas
PT missed some modes in each run. Table 3 also shows, out of the 20 runs, how
many times each mode was missed by PT; for example, mode 1 was missed twice
by PT over the 20 runs. The better global exploration ability of the EE sampler is
thus evident. To further compare the two algorithms by their convergence speed,
we tuned the temperature ladder for PT to achieve the best performance of PT;
for example, we tuned the highest temperature T4 of PT in the range [5, 100]. We
observe that the best performance of PT such that it is not trapped by some local
modes in 50,000 samples and that it achieves minimal sample autocorrelation is
the setting associated with T4 = 10. The sample autocorrelations of the target chain
X(0) from the EE sampler and the optimal PT are shown in Figures 3(c) and (d),
respectively; evidently the autocorrelation of the EE sampler decays much faster
even compared with a well-tuned PT.
We also use this example to study the choice of pee . We took pee = 0.1, 0.2, 0.3
and 0.4, and ran the EE sampler 20 times independently for each value of pee . From
the average mean squared errors for estimating (EX1 , EX2 ) and (EX12 , EX22 ) we
find that the EE sampler behaves well when pee is between 0.1 and 0.3. When pee
is increased to 0.4, the performance of the EE sampler worsens. In addition, we
also noticed that the performance of the EE sampler is not sensitive to the value of
pee , as long as it is in the range [0.05, 0.3].
Next, we changed the weight and variance for each component in (6) such that
wi ∝ 1/di and σi2 = di /20, where di = µi − (5, 5) . The distributions closer to
1595
EQUI-ENERGY SAMPLER
F IG . 3. Mixture normal distribution with equal weights and variances. The sample path of the last
2000 iterations for (a) EE sampler and (b) parallel tempering. Autocorrelation plots for the samples
from (c) EE sampler and (d) optimal parallel tempering.
TABLE 2
Comparison of the EE sampler and PT for estimating the mixture normal distributions
EX1
EX2
EX21
EX22
True value
EE
PT
MSE(PT)/MSE(EE)
4.478
4.5019 (0.107)
4.4185 (0.170)
2.7
4.905
4.9439 (0.139)
4.8790 (0.283)
3.8
25.605
25.9241 (1.098)
24.9856 (1.713)
2.6
33.920
34.4763 (1.373)
33.5966 (2.867)
3.8
True value
EE
PT
MSE(PT)/MSE(EE)
4.688
4.699 (0.072)
4.709 (0.116)
2.6
5.030
5.037 (0.086)
5.001 (0.134)
2.5
25.558
25.693 (0.739)
25.813 (1.122)
2.4
31.378
31.433 (0.839)
31.105 (1.186)
2.1
The numbers in parentheses are the standard deviations from 20 independent runs. The upper and
bottom halves correspond to equal and unequal weights and variances, respectively.
1596
S. C. KOU, Q. ZHOU AND W. H. WONG
TABLE 3
Comparison of mixing speed of the EE sampler and PT for the mixture normal distribution
R1
R2
PT mis
R1
R2
PT mis
µ1
µ2
µ3
µ4
µ5
µ6
µ7
µ8
µ9
µ10
2.8
1.6
2
2.9
4.5
3
3.2
2.5
1
3.6
4.9
5
2.7
2.5
4
4.1
2.1
0
1.7
2.2
2
2.1
2.3
2
2.7
2.3
3
3.3
2.5
1
µ11
µ12
µ13
µ14
µ15
µ16
µ17
µ18
µ19
µ20
1.3
3.8
1
2.5
1.2
3
2.0
1.9
1
4.4
2.1
1
2.2
3.2
1
2.5
3.0
3
2.0
3.1
4
1.9
3.0
6
2.6
3.9
1
1.4
2.0
3
R1 is the ratio of median frequency error of PT over that of EE; R2 is the ratio of maximum frequency
error of PT over that of EE. PT mis reports the number of runs for which PT missed the individual
modes. The EE sampler did not miss any of the 20 modes. All the statistics are calculated from the
last 2000 samples in 20 independent runs.
(5, 5) have larger weights and lower energy. We used this example to test our strategy of dynamically updating the energy and temperature ladders (Section 3.3). We
set the initial energy lower bound H0 = 3, which is higher than the energy at any of
the 20 modes (in practice, we could try to get a better initial value of H0 by some
local optimization). The highest energy level and temperature were set at 100 and
20, respectively. We started with five chains and dynamically added more chains
if necessary. The strategy for automatically updating the proposal step size was
applied as well. After drawing the samples we also calculated the first two sample
moments from the target chain X (0) as simple estimates for the theoretical moments. The mean and standard deviation of the estimates based on 20 independent
EE runs, each consisting of 10,000 iterations, are shown in Table 2 (the bottom
half ). The sample path for the last 1000 iterations and the autocorrelation plots are
shown in Figure 4.
For comparison, PT was applied to this unequal weight case as well. PT used the
same total number of chains as the EE sampler. The MH step size of PT was tuned
to achieve the same acceptance rate. The temperature ladder of PT was also tuned
so that the exchange operator in PT had the same acceptance rate as the equienergy jump in EE, similarly to what we did in the previous comparison. With
these well-tuned parameters, we ran PT for the same number of iterations and
calculated the first two sample moments as we did for the EE samples. The results
are reported in Table 2. It is seen that the EE sampler with the self-adaptation
strategies provided more precise estimates (both smaller bias and smaller variance)
in all the cases. Similar improvements in mixing speed and autocorrelation decay
were also observed (Figure 4).
EQUI-ENERGY SAMPLER
1597
F IG . 4. Mixture normal distribution with unequal weights and variances. Autocorrelation plots
for the samples from (a) EE sampler and (b) parallel tempering. The sample path for the last 1000
iterations for (c) EE sampler and (d) parallel tempering.
4. Calculating the density of states and the Boltzmann averages. The previous section illustrated the benefit of constructing the energy rings: It allows more
efficient sampling through the equi-energy jump. By enabling one to look at the
states within a given energy range, the energy rings also provide a direct means to
study the microscopic structure of the state space on an energy-by-energy basis,
that is, the microcanonical distribution. The EE sampler and the energy rings are
thus well suited to study problems in statistical mechanics.
Starting from the Boltzmann distribution (1) one wants to study various aspects
of the system. The density of states (u), whose logarithm is referred to as the
microcanonical entropy, plays an important role in the study, because in addition
to the temperature–energy duality depicted in Section 2, many thermodynamic
quantities can be directly calculated from the density of states, for example, the
partition function Z(T ), the internal energy U (T ), the specific heat C(T ) and the
1598
S. C. KOU, Q. ZHOU AND W. H. WONG
free energy F (T ) can be calculated via
Z(T ) =
(u)e−u/T du,
u (u)e−u/T du
,
U (T ) = (u)e−u/T du
∂U (T )
1
C(T ) =
= 2
∂T
T
2
u (u)e−u/T du
u(u)e−u/T du 2
,
−
−u/T
−u/T
(u)e
du
(u)e
du
F (T ) = −T log(Z(T )).
Since the construction of the energy rings is an integral part of the EE sampler, it
leads to a simple way to estimate the density of states. Suppose we have a discrete
system to study, and after performing the EE sampling on the distributions
1
πi (x) ∝ exp(−hi (x)),
hi (x) =
h(x) ∨ Hi ,
0 ≤ i ≤ K,
Ti
(i)
(i)
we obtain the energy rings D̂j (0 ≤ i, j ≤ K), each D̂j corresponding to an a
priori energy range [Hj , Hj +1 ). To calculate the density of states for the discrete
system we can further divide the energy rings into subsets such that each subset
corresponds to one energy level. Let miu denote the total number of samples in the
ith chain X (i) that have energy u. Clearly u∈[Hj ,Hj +1 ) miu = |D̂j(i) |. Under the
distribution πi
(u)e−(u∨Hi )/Ti
Pπi h(X) = u = .
−(v∨Hi )/Ti
v (v)e
Since the density of states (u) is common for each πi , we can
combine the
(i)
sample
chains X , 0 ≤ i ≤ K, to estimate (u). Denote mi• = u miu , m•u =
−(u∨Hi )/Ti for notational ease. Pretending we have independent
i miu and aiu = e
multinomial observations,
(u)aiu
(. . . , miu , . . .) ∼ multinomial mi• ; . . . , ,... ,
v (v)aiv
(8)
i = 0, 1, . . . , K,
(7)
the MLE of (u) is then
(9)
ˆ = arg max
u
m•u log((u)) −
i
mi• log
(v)aiv
.
v
Since (u) is specified up to a scale change [see (7)], to estimate the relative
value we can without loss of generality set (u0 ) = 1 for some u0 . The first-order
condition of (9) gives
mi• aiu
m•u
(10)
=0
for all u,
−
ˆ
ˆ
(u)
v (v)aiv
i
EQUI-ENERGY SAMPLER
1599
ˆ
which can be used to compute (u)
through a simple iteration,
m a
i• iu
ˆ
(u)
= m•u
(11)
.
ˆ
(v)a
iv
v
i
A careful reader might question the independent multinomial assumption (9).
But it is only used to motivate (10), which itself can be viewed as a moment equation and is valid irrespective of the multinomial assumption.
With the density of states estimated,
suppose one wants to investigate how the
xg(x) exp(−h(x)/T )
Boltzmann average E(g(X); T ) =
varies as a function of temx exp(−h(x)/T )
perature T (e.g., phase transition). Then we can write (see Lemma 1)
E g(X); T =
−u/T ν (u)
g
.
(u)e−u/T
u (u)e
u
To estimate the microcanonical average νg (u) = E(g(X)|h(X) = u), we can simply calculate the sample average over the energy slice {x : h(x) = u} for each chain
X(0) , . . . , X(K) and combine them using weights proportional to the energy slice
sample size miu for i = 0, 1, . . . , K.
So far we have focused on discrete systems. In continuous systems to estimate
(u) and νg (u) = E(g(X)|h(X) = u) we can simply discretize the energy space
with an acceptable resolution and follow the preceding approach to use the EE
sampler and the energy rings.
To illustrate our method to calculate the density of states and the Boltzmann
averages, let us consider a multidimensional normal distribution f (x; T ) =
1
1 n 2
i xi .
Z(T ) exp[−h(x)/T ] with temperature T and the energy function h(x) = 2
This corresponds to a system of n uncoupled harmonic oscillators. Since the analytical result is known in this case, we can check our numerical calculation with
the exact values. Suppose we are interested in estimating E(X12 ; T ) and the ratio of
normalizing constants Z(T )/Z(1) for T in [1, 5]. The theoretical density of states
(from the χ 2 result in this case) is (u) ∝ un/2−1 and the microcanonical average
νg (u) = E(X12 |h(X) = u) = 2u/n. Our goal is to estimate (u) and νg (u) and
then combine them to estimate both E(X12 ; T ) and Z(T )/Z(1) as functions of the
temperature T .
We took n = 4 and applied the EE sampler with five chains to sample from the
four-dimensional distribution. The energy levels H0 , H1 , . . . , H4 were assigned by
a geometric progression along the interval [0, 50]. The temperatures were accordingly set between 1 and 20. The equi-energy jump probability pee was taken to
be 0.05. Each chain was run for 150,000 iterations (the first 50,000 iterations were
the burn-in period); the sampling was repeated ten times to calculate the standard
error of our estimates. Since the underlying distribution is continuous, to estimate
(u) and νg (u) each energy ring was further evenly divided into 20 small interˆ
vals. The estimates (u)
and ν̂g (u) were calculated from the recursion (11) and
the combined energy slice sample average, respectively. Figure 5(a) and (b) shows
1600
S. C. KOU, Q. ZHOU AND W. H. WONG
ˆ
ˆ
and ν̂g (u), we
(u)
and ν̂g (u) compared with their theoretical values. Using (u)
2
estimated E(X1 ; T ) and Z(T )/Z(1) by
E(X12 ; T ) ≈
−u/T u
ˆ
u ν̂g (u)(u)e
,
−u/T u
ˆ
u (u)e
−u/T u
ˆ
Z(T )
(u)e
≈ u
.
−u
ˆ
Z(1)
u (u)e u
Letting T vary in [1, 5] results in the estimated curves in Figure 5(c) and (d).
One can see from the figure that our estimations are very precise compared to the
theoretical values. In addition, our method has the advantage that we are able to
F IG . 5. The density of states calculation for the four-dimensional normal distribution. (a) Estiˆ
mated density of states (u);
(b) estimated micro-canonical average ν̂(u); (c) estimated E(X12 ; T )
and (d) estimated Z(T )/Z(1) for T varying from 1 to 5. The error bars represent plus or minus twice
the standard deviation from ten independent runs.
EQUI-ENERGY SAMPLER
1601
construct estimates for a wide temperature range using one simulation that involves
only five temperatures.
We further tested our method on a four-dimensional normal mixture distribution
with the energy function
(12)
h(x) = − log[exp(−x − µ1 2 ) + 0.25 exp(−x − µ2 2 )],
where µ1 = (3, 0, 0, 0) and µ2 = (−3, 0, 0, 0) . For the Boltzmann distribution
1
Z(T ) exp(−h(x)/T ), we are interested in estimating the probability P (X1 > 0; T )
and studying how it varies as T changes. It is easy to see if T = 1 this probability
will be 0.8 = 1/1.25, the mixture proportion, and it decreases as T becomes larger.
We applied the EE sampler to this problem with the same parameter setting as
in the preceding 4D normal example. Using the energy rings, we calculated the
ˆ
estimates (u)
and ν̂g (u) and then combined them to estimate P (X1 > 0; T ).
Figure 6 plots the estimates. It is interesting to note from the figure that the density
of states for the mixture model has a change point at energy u = 1.4. This is due
to the fact that the energy at the mode µ2 is about 1.4(≈ − log 0.25), and hence
for u < 1.4 all the samples are from the first mode µ1 , and for u > 1.4 the samples
come from both modes, whence a change point appears. A similar phenomenon
occurs in the plot for νg (u) = P (X1 > 0|h(X) = u). The combined estimate of
P (X1 > 0; T ) in Figure 6 was checked and agreed very well with the exact values
from numerical integration.
5. Statistical estimation with the EE sampler. In statistical inference, usually after obtaining the Monte Carlo samples the next goal is to estimate some
statistical quantities. Unlike statistical mechanical considerations, in statistical inference problems often one is only interested in one target distribution (i.e., only
one temperature). Suppose the expected value Eπ0 g(X) under the target distribution π0 = π is of interest. A simple estimate is the sample mean under the chain
X (0) (T = 1). This, however, does not use the samples optimally in that it essentially throws away all the other sampling chains X (1) , . . . , X(K) . With the help of
the energy rings, in fact all the chains can be combined together to provide a more
efficient estimate. One way is to use the energy-temperature duality as discussed
above. Here we present an alternative, more direct method: We directly work with
the (finite number of ) expectations within each energy set. For a continuous problem, this allows us to avoid dealing with infinitesimal energy intervals, which are
needed in the calculation of microcanonical averages.
The starting point is the identity
(13)
Eπ0 g(X) =
K
pj Eπ0 {g(X)|X ∈ Dj },
j =0
where pj = Pπ0 (X ∈ Dj ), which suggests that we can first estimate pj and Gj =
Eπ0 {g(X)|X ∈ Dj }, and then conjoin them. A naive estimate of Gj is the sample
1602
S. C. KOU, Q. ZHOU AND W. H. WONG
ˆ
F IG . 6. Four-dimensional normal mixture distribution. (a) Estimated density of states (u);
(b)
ˆ
estimated microcanonical average ν̂(u); (c) detailed plot for (u)
around the change point; (d)
detailed plot for ν̂(u) around the change point; (e) estimated P (X1 > 0; T ) for T in [1, 5]. For
comparison, the theoretical (u) from the 4D normal example is also shown in (a) and (c). The
error bars represent plus or minus twice the standard deviation from ten independent runs.
1603
EQUI-ENERGY SAMPLER
(0)
average of g(x) within the energy ring D̂j . But a better way is to use the energy
(i)
rings D̂j for i = 0, 1, . . . , K together, because for each i the importance-weighted
Ĝ(i)
j
(i)
X∈D̂j
=
g(X)w(i) (X)
(i)
X∈D̂j
w(i) (X)
,
where w(i) (x) = exp{hi (x) − h(x)}, is a consistent estimate of Gj . We can thus
put proper weights on them to combine them.
Since it is quite often that a number of different estimands g are of interest,
a conceptually simple and effective method is to weight Ĝ(i)
j , i = 0, 1, . . . , K,
proportionally to their effective sample sizes [15],
ESS(i)
j
=
|D̂j(i) |
1 + Varπi {w(i) (X)|X ∈ Dj }/(Eπi {w(i) (X)|X ∈ Dj })2
,
which measures the effectiveness of a given importance-sampling scheme, and
(i)
does not involve the specific estimand. ESSj can be easily estimated by using the
(i)
sample mean and variance of w(i) (X) for X in the energy ring D̂j .
To estimate the energy-ring probability pj = Pπ0 (X ∈ Dj ), one can use the
(0)
sample size proportion
|D̂j |
K
(0)
k=0 |D̂k |
cause for any i,
p̂j(i)
(i)
X∈D̂j
=
X∈D̂ (i)
. But again it is better to use all the chains, be-
w(i) (X)
w(i) (X)
,
where D̂ (i) =
D̂j(i)
j
is a consistent estimate of pj . To combine them properly, we can weight them
inversely proportional to their variances. A simple delta method calculation (dis(i)
regarding the dependence) gives the asymptotic variance of p̂j ,
Vj(i) =
1 Eπi [(I (X ∈ Dj ) − pj )w(i) (X)]2
,
ni
[Eπi w(i) (X)]2
(i)
where ni is the total number of samples under the ith chain X (i) . Vj
estimated by
(i)
V̂j
=
X∈D̂ (i) [(I (X
∈ Dj ) − p̃j )w(i) (X)]2
( X∈D̂ (i) w(i) (X))2
(i)
X∈D̂j
(i)
2
2
X∈D̂ (i) [w (X)]
+
p̃
,
j w(i) (X))2
( X∈D̂ (i) w(i) (X))2
[w(i) (X)]2
= (1 − 2p̃j ) ( X∈D̂ (i)
can be
1604
S. C. KOU, Q. ZHOU AND W. H. WONG
(i)
where p̃j is a consistent estimate of pj . Since V̂j requires an a priori p̃j , a simple
iterative procedure can be applied to obtain a good estimate of pj , starting from
(0)
the naive p̂j . In practice to ensure the numerical stability of the variance estimate
(i)
(i)
V̂j it is recommended that p̂j be included in the combined estimate only if
(i)
the sample size |D̂j | is reasonably large, say more than 50. When we get our
estimates for pj , we need to normalize them before plugging in (13) to calculate
our combined estimates.
Since our energy-ring estimate of Eπ0 g(X) employs all the sampling chains,
one expects it to increase the estimation efficiency by a large margin compared
with the naive method.
The two-dimensional normal mixture model (continued). To illustrate our estimation strategy, consider again the 2D mixture model (6) in Section 3.4 with equal
weights and variances σ1 = · · · = σ20 = 0.1, w1 = · · · = w20 = 0.05.
Suppose we want to estimate the functions EX12 , EX22 , Ee−10X1 and Ee−10X2
and the tail probabilities
p1 = P X1 > 8.41, X2 < 1.68 and (X1 − 8.41)2 + (X2 − 1.68)2 > 4σ ,
p2 = P (X12 + X22 > 175).
After obtaining the EE samples (as described in Section 3.4), we calculated our
energy-ring estimates. For comparison, we also calculated the naive estimates
based on the target chain X (0) only. The calculation was repeated for the 20 independent runs of the EE sampler under the same parameter settings. Table 4 reports
the result. Evidently, the energy-ring estimates with both smaller bias and smaller
variance are much more precise than the naive estimates. The mean squared error
has been reduced by at least 28% in all cases. The improvement over the naive
TABLE 4
Comparison of the energy-ring estimates with the naive estimates that use X (0) only
EX21
EX22
Ee−10X1
Ee−10X2
p1
p2
True value
25.605
33.920
9.3e-7
0.0378
4.2e-6
6.7e-5
Energy ring
estimates
25.8968
(0.9153)
34.2902
(1.1579)
8.8e-7
(1.2e-7)
0.0379
(0.0044)
4.5e-6
(1.5e-6)
6.4e-5
(2.0e-5)
Naive
estimates
25.9241
(1.0982)
34.4763
(1.3733)
8.7e-7
(1.5e-7)
0.0380
(0.0052)
1.0e-5
(2.5e-5)
7.3e-5
(6.2e-5)
71%
67%
57%
72%
0.34%
11%
MSER
The numbers in parentheses are the standard deviations from 20 independent runs. MSER is defined
as MSE1 /MSE2 , where MSE1 and MSE2 are the mean squared errors of the energy-ring estimates
and the naive estimates, respectively.
1605
EQUI-ENERGY SAMPLER
method is particularly dramatic in the tail probability estimation, where the MSEs
experienced a more than ninefold reduction.
6. Applications of the EE sampler. We will apply the EE sampler and the
estimation strategy to a variety of problems in this section to illustrate its effectiveness. The first example is a mixture regression problem. The second example
involves motif discovery in computational biology. In the third one we study the
thermodynamic property of a protein folding model.
6.1. Mixture exponential regression. Suppose we observe data pairs (Y, X) =
{(y1 , x1 ), . . . , (yn , xn )} from the mixture model
(14)
yi ∼
Exp[θ1 (xi )],
Exp[θ2 (xi )],
with probability α,
with probability 1 − α,
where θj (xi ) = exp[β Tj xi ] (j = 1, 2), Exp(θ ) denotes an exponential distribution
with mean θ and β 1 , β 2 and xi (i = 1, 2, . . . , n) are p-dimensional vectors. Given
the covariates xi and the response variable yi , one wants to infer the regression coefficients β 1 and β 2 and the mixture probability α. The likelihood of the observed
data is
(15)
P (Y, X|α, β 1 , β 2 )
∝
n i=1
yi
1−α
yi
α
exp −
exp −
+
θ1 (xi )
θ1 (xi )
θ2 (xi )
θ2 (xi )
.
If we put a Beta(1, 1) prior on α, and a multivariate normal N(0, σ 2 I) on β j
(j = 1, 2), the energy function, defined as the negative log-posterior density, is
(16)
h(α, β 1 , β 2 ) = − log P (α, β 1 , β 2 |Y, X)
p
= − log P (Y, X|α, β 1 , β 2 ) +
2 1 β 2 + C,
2σ 2 k=1 j =1 kj
where C is a constant. Since h(α, β 1 , β 2 ) = h(1−α, β 2 , β 1 ) (i.e., nonidentifiable),
the posterior distribution has multiple modes in the (2p + 1)-dimensional parameter space. This example thus serves as a good model to test the performance of the
EE sampler in high-dimensional multimodal problems.
We simulated 200 data pairs with the following parameter setting: α = 0.3,
β 1 = (1, 2) , β 2 = (4, 5) and xi = (1, ui ) , with the ui ’s independently drawn
from Unif(0, 2). We took σ 2 = 100 in the prior normal distributions for the regression coefficients. After a local minimization of the energy function (16) from
several randomly chosen states in the parameter space, the minimum energy Hmin
is found to be around Hmin ≈ −1740.8 (this value is not crucial in the EE sampler,
since it can adaptively adjust the energy and temperature ladder; see Section 3.3).
1606
S. C. KOU, Q. ZHOU AND W. H. WONG
We then applied the EE sampler with eight chains to sample from the posterior distribution. The energy ladder was set between Hmin and Hmin + 100 in a geometric
progression, and the temperatures were between 1 and 30. The equi-energy jump
probability pee was taken to be 0.1. Each chain was run for 15,000 iterations with
the first 5000 iterations serving as a burn-in period. The overall acceptance rates for
the MH move and the equi-energy jump were 0.27 and 0.80, respectively. Figure
7(a) to (c) shows the sample marginal posterior distributions of α, β 1 and β 2 from
the target chain X (0) . It is clear that the EE sampler visited the two modes, equally
frequently in spite of the long distance between the two modes, and the samples
around each mode were centered at the true parameters. Furthermore, since the
posterior distribution for this problem has two symmetric modes in the parameter
space due to the nonidentifiability, by visiting the two modes equally frequently
the EE sampler demonstrates its capability of global exploration (as opposed to
being trapped by a local mode).
For comparison, we also applied PT with eight chains to this problem under
the same parameter setting, where the acceptance rates for the MH move and the
exchange operator were 0.23 and 0.53, respectively. To compare their ability to
escape local traps, we calculated the frequency with which the samples stayed at
one particular mode in the lowest temperature chain (T0 = 1). This frequency was
0.55 for the EE samplers and 0.89 for PT, indicating that the EE sampler visited the
two modes symmetrically, while PT tended to be trapped at one mode for a long
time. We further tuned the temperature ladder for PT with the highest temperature
varying from 10 to 50. For each value of the highest temperature, the temperature
ladder was set to decrease with a geometric rate. We observed that the sample autocorrelations decrease with the decrease of the highest temperature, that is, the
denser the temperature ladder, the smaller the sample autocorrelation. However,
the tradeoff is that with lower temperature, PT tends to get trapped in one local
mode. For instance, PT was totally trapped to one particular mode if we set the
highest temperature to be 10 although with this temperature ladder PT showed autocorrelation comparable with that of EE. On the other hand, if we increased the
temperatures, PT would be able to jump between the two modes, but the autocorrelation also increased since the exchange rates became lower. But even with the
highest temperature raised to 50, 80% of the PT samples were trapped to one mode
and the posterior distributions were severely asymmetric. The autocorrelation plots
for β11 are compared in Figure 7(d) and (e), where one sees that autocorrelation
of the EE sampler decays faster than that of PT. We also plot the autocorrelation
for PT with highest temperature T7 = 10 in Figure 7(f), which corresponded to
the minimal autocorrelation reached by PT among our tuning values, but the local
trapping of PT with this parameter setting is severely pronounced.
6.2. Motif sampling in biological sequences. A central problem in biology is
to understand how gene expression is regulated in different cellular processes. One
EQUI-ENERGY SAMPLER
1607
F IG . 7. Statistical inference for the mixture exponential regression model. Marginal posterior distribution for (a) α; (b) β11 ; and (c) β12 (the marginal distributions for β 2 are similar to those for β 1
and thus are not plotted here). Autocorrelation plot for the samples from (d) EE sampler; (e) PT with
T7 = 30; and (f ) PT with T7 = 10.
important means for gene regulation is through the interaction between transcription factors (TF’s) and their binding sites (viz., the sites that the TF recognizes and
binds to in the regulatory regions of the gene). The common pattern of the recognition sites of a TF is called a binding motif, whose identification is the first step for
understanding gene regulation. It is very time-consuming to determine these binding sites experimentally, and thus computational methods have been developed in
the past two decades for discovering novel motif patterns and TF binding sites.
Some early methods based on site consensus used a progressive alignment procedure [36] to find motifs. A formal statistical model for the position-specific
weight matrix (PWM)-based method was described in [21] and a complete
Bayesian method was given in [25]. Based on a missing data formulation, the EM
algorithm [1, 21] and the Gibbs sampler [20] were employed for motif discovery.
The model has been generalized to discover modules of several clustered motifs
simultaneously via data augmentation with dynamic programming [41]. See [14]
for a recent review.
From a sampling point of view motif discovery poses a great challenge, because
it is essentially a combinatorial problem, which makes the samplers very vulnerable to being trapped in numerous local modes. We apply the EE sampler to this
problem under a complete Bayesian formulation to test its capability.
6.2.1. Bayesian formulation of motif sampling. The goal of motif discovery
is to find the binding sites of a common TF (i.e., positions in the sequences
1608
S. C. KOU, Q. ZHOU AND W. H. WONG
that correspond to a common pattern). Let S denote a set of M (promoter region) sequences, each sequence being a string of four nucleotides, A, C, G or
T. The lengths of the sequences are L1 , L2 , . . . , and LM . For notational ease,
let A = {Aij , i = 1, 2, . . . , M, j = 1, 2, . . . , Li } be the indicator array such that
Aij = 1 if the j th position on the ith sequence is the starting point for a motif site
and Aij = 0 otherwise. In the motif sampling problem, a first-order Markov chain
is used to model the background sequences; its parameters θ 0 (i.e., the transition
probabilities) are estimated from the entire sequence data prior to the motif search.
We thus effectively assume that θ 0 is known a priori. Given A, we further denote
the aligned motif sites by S(A), the nonsite background sequences by S(Ac ) and
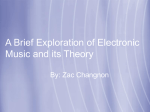
the total number of motif sites by |A|. The motif width w is treated as known.
The common pattern of the motif is modeled by a product multinomial distribution = (θ 1 , θ 2 , . . . , θ w ), where each θ i is a probability vector of length 4 for the
preferences of the nucleotides (A, C, G, T ) in the motif column i. See Figure 8 for
an illustration of the motif model.
To write down the joint distribution of the complete data and all the parameters,
it is assumed a priori that a randomly selected segment of width w has probability p0 to be a motif site (p0 is called the “site abundance” parameter). The joint
distribution function has the form
P (S, A, , p0 ) = P (S|A, )P (A|p0 )π()π(p0 )
(17)
P (S(A)|A, )
|A|
P (S|θ 0 )p0 (1 − p0 )L−|A| π()π(p0 )
P (S(A)|A, θ 0 )
w
1
c +β −1 |A|+a−1
θ i i p0
(1 − p0 )L−|A|+b−1 ,
∝
P (S(A)|A, θ 0 ) i=1 i
=
where we put a product Dirichlet prior π() with parameter (β 1 , . . . , β w ) on F IG . 8. (a) The sequences are viewed as a mixture of motif sites (the rectangles) and background
letters. (b) Motif model is represented by PWM, or equivalently, a product multinomial distribution,
where we assume that the columns within a motif are independent.
1609
EQUI-ENERGY SAMPLER
(each β i is a length-4 vector corresponding to A, C, G, T ), and a Beta(a, b) prior
π(p0 ) on p0 . In (17), ci (i = 1, 2, . . . , w) is the count vector for the ith position
of the motif sites S(A) [e.g., c1 = (c1A , c1C , c1G , c1T ) counts the total number
of A, C, G, T in the first position of the motif in all the sequences], the notation
(c +β )
(c +β )
θ i i i = j θij ij ij (j = A, C, G, T ), and L = M
i=1 Li . Since the main goal
is to find the motif binding sites given the sequence, P (A|S) is of primary interest.
The parameters ( and p0 ) can thus be integrated out resulting in the following
“collapsed” posterior distribution [14, 24]:
P (A|S) ∝
(18)
1
P (S(A)|A, θ 0 )
w
(ci + β i )
(|A| + a)(L − |A| + b) ×
,
(L + a + b)
(|A| + |β i |)
i=1
×
where (ci + β i ) =
j
(cij + βij ) (j = A, C, G, T ) and |β i | =
j
βij .
6.2.2. The equi-energy motif sampler. Our target is to sample from P (A|S).
The EE sampler starts from a set of modified distributions,
h(A) ∨ Hi
,
fi (A) ∝ exp −
Ti
i = 0, 1, . . . , K,
where h(A) = − log P (A|S) is the energy function for this problem. At the target
chain (i = 0, T0 = 1), we simply implement the Gibbs sampler, that is, sequentially
sample the indicator array A one position at a time with the rest of the positions
fixed. To update other sampling chains at i = 1, 2, . . . , K, given the current sample
ˆ by a simple frequency counting with some
A we first estimate the motif pattern extra pseudocounts, where the number of pseudocounts increases linearly with the
ˆ is stretched more toward a uniform
chain index so that at higher-order chains weight matrix. Next, we fix p̂0 = 1/L̄, where L̄ is the average sequence length.
ˆ and p̂0 , we sample each position in the sequences independently to obtain
Given a new indicator array A∗ according to the Bayes rule: Suppose the nucleotides at
positions j to j + w − 1 in sequence k are x1 x2 · · · xw . We propose A∗kj = 1 with
probability
qkj =
p̂0
w
p̂0
ˆ
n=1 nxn
w
ˆ
n=1 nxn
+ (1 − p̂0 )P (x1 · · · xw |θ0 )
,
where P (x1 · · · xw |θ0 ) denotes the probability of generating these nucleotides from
the background model. Then A∗ is accepted to be the new indicator array according
to the Metropolis–Hastings ratio
(19)
ˆ ∗)
fi (A∗ ) P (A|
·
,
r=
ˆ
fi (A) P (A∗ |)
1610
S. C. KOU, Q. ZHOU AND W. H. WONG
ˆ = k,j qkj denotes the proposal probability of generating the
where P (A∗ |)
sample A∗ given current A. In addition to the above updating, the EE motif sampler performs the equi-energy jump in each iteration with probability pee to help
the sampler move freely between different local modes.
6.2.3. Sampling motifs in “low complexity” sequences. In the genomes of
higher organisms, the presence of long stretches of simple repeats, such as
AAAA . . . or CGCGCG . . . often makes the motif discovery more difficult, because these repeated patterns are local traps for the algorithms—even the most
popular motif finding algorithms based on the Gibbs sampler, such as BioProspector [26] and AlignACE [33], are often trapped to the repeats and miss the true motif
pattern. To test whether the EE motif sampler is capable of finding the motifs surrounded by simple repeats, we constructed a set of sequences with the following
transition matrix for the background model:
(20)
1 − 3α
α
θ0 =
α
α
α
1 − 3α
α
α
α
α
1 − 3α
α
α
α
,
α
1 − 3α
where α = 0.12. The data set contained ten sequences, each of length 200 base
pairs (i.e., L1 = L2 = · · · = L10 = 200). Then we independently generated 20 motif sites from the weight matrix whose logo plot [34] is shown in Figure 9(a) and
inserted them into the sequences randomly.
The EE motif sampler was applied to this data set with w = 12. To set up the energy and temperature ladder, we randomly picked 15 segments of length w in the
sequences, treated them as motif sites, and used the corresponding energy value
as the upper bound of the energy HK . For the lower bound H0 , a rough value
was estimated by calculating the energy function (18) for typical motif strength
with a reasonable number of true sites. Note that since the EE sampler can adaptively adjust the energy and temperature ladder (see Section 3.3), the bound H0
does not need to be very precise. After some trials H0 was set to be −50. We utilized K + 1 = 5 chains. The energy ladder Hj was set by a geometric progression
between H0 and HK . The temperatures were set by (Hj +1 − Hj )/Tj = 5. The
equi-energy jump probability pee was taken to be 0.1. We ran each chain for 1000
iterations. Our algorithm predicted 18.4 true sites (out of 20) with 1.0 false site on
average over ten independent simulations—the EE sampler successfully found the
true motif pattern to a large extent. The sequence logo plot of the predicted sites
is shown in Figure 9(b), which is very close to the true pattern in Figure 9(a) that
generates the motif sites.
The performance of the EE motif sampler was compared with that of BioProspector and AlignACE, where we set the maximum number of motifs to be
detected to 3 and each algorithm was repeated ten times for the data set. The motif width was set to be w = 12. Both algorithms, however, tend to be trapped in
EQUI-ENERGY SAMPLER
1611
F IG . 9. Sequence logo plots. (a) The motif pattern that generates the simulated sites. (b) The pattern
of the predicted sites by the EE motif sampler. (c) and (d) Repetitive patterns found by BioProspector
and AlignACE.
some local modes and output repeats like those shown in Figures 9(c) and (d). One
sees from this simple example that the EE sampler, capable of escaping from the
numerous local modes, could increase the global searching ability of the sampling
algorithm.
6.2.4. Sampling mixture motif patterns. If we suspect there are multiple distinct motif patterns in the same set of sequences, one strategy is to introduce more
motif matrices, one for each motif type [25]. Alternatively, if we view the different
motif patterns as distinct local modes in the sample space, our task is then to design a motif sampler that frequently switches between different modes. This task is
almost impossible for the Gibbs sampler, since it can easily get stuck in one local
mode (one motif pattern) and have no chance to jump to other patterns in practice.
We thus test if the EE sampler can achieve this goal.
In our simulation, we generated 20 sites from each of two different motif models with logo plots in Figures 10(a) and (b) and inserted them randomly into 20
generated background sequences, each of length 100. We thus have 40 motif sites
in 20 sequences. The energy ladder in the EE sampler was set by a geometric progression in the range [0, 110] (this is obtained similarly to the previous example).
The equi-energy jump probability pee was set to 0.1. The EE motif sampler used
10 chains; each had 1000 iterations. We recorded the frequency of each position in
the sequences being the start of a motif site. Figure 10(c) shows the frequency for
the starting positions of the 40 true motif sites (i.e., the probability that each individual motif site was visited by the EE motif sampler). It can be seen that the EE
sampler visited both motif patterns with a ratio of 0.4:0.6; by contrast, the Gibbs
1612
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 10. (a) and (b) Two different motifs inserted in the sequences. (c) The marginal posterior
distribution of the 40 true sites, which reports the frequencies that these true site-starting positions
are correctly sampled during the iterations. Sites 1–20 are of one motif type; sites 21–40 are of the
other motif type. (d) ROC curve comparison between the EE sampler and the Gibbs sampler.
motif sampler can only visit one pattern in a single run. We further sorted all the
positions according to their frequencies of being a motif-site-start in descending
order. For any q between 0 and 1, one could accept any position with frequency
greater than q as a predicted motif site of the sampler. Thus by decreasing q from
1 to 0, the numbers of both true and false discovered sites increase, which gives the
so-called ROC curve (receiver operating characteristic curve) that plots the number
of false positive sites versus the number of true positive sites as q varies. Figure
10(d) shows the ROC curves for both the EE motif sampler and the Gibbs motif
sampler.
It can be seen from the figure that for the first 20 true sites, the two samplers
showed roughly the same performance. But since the Gibbs sampler missed one
mode, the false positive error rate increased dramatically when we further decreased q to include more true sites. By being able to visit both modes (motif
patterns), the EE motif sampler, on the other hand, had a very small number of
false positive sites until we included 38 true sites, which illustrates that the EE
motif sampler successfully distinguished both types of motif patterns from the
background sequences.
EQUI-ENERGY SAMPLER
1613
6.3. The HP model for protein folding. Proteins are heteropolymers of
20 types of amino acids. For example, the primary sequence of a protein, cys-ileleu-lys-glu-met-ser-ile-arg-lys, tells us that this protein is a chain of 10 amino acids
linked by strong chemical bonds (peptide bonds) in the backbone. Each different
amino acid has a distinct side group that confers different chemical properties
to it. Under a normal cellular environment, the side groups form weak chemical
bonds (mainly hydrogen bonds) with each other and with the backbone so that
the protein can fold into a complex, three-dimensional conformation. Classic experiments such as the ribonuclease refolding experiments [35] suggest that the
three-dimensional conformations of most proteins are determined by their primary
sequences. The problem of computing the 3D conformation from a primary sequence, known as the protein folding problem, has been a major challenge for
biophysicists for over 30 years. This problem is difficult for two reasons. First,
there are uncertainties on how to capture accurately all the important physical
interactions such as covalent bonds, electrostatic interactions, and interaction between the protein and its surrounding water molecules, and so on, into a single
energy function that can be used in minimization and simulation computations.
Furthermore, even if the energy function is not in question, we still do not have
efficient algorithms for computing the protein conformation from the energy function. For these reasons, biophysicists have developed simplified protein folding
models with greatly reduced complexity in both the conformational space and the
energy function. It is hoped that the reduced complexity in these simplified models will allow us to deduce insights about the statistical mechanics of the protein
folding process through extensive numerical computations.
The HP model is a simplified model that is of great current interest. In this
model, there are only two types of amino acids, namely a hydrophilic type (P-type)
that is capable of favorable interaction with water molecules, and a hydrophobic
type (H-type) that does not interact well with water. Thus, the primary sequence of
the length-10 protein in the beginning of this section is simplified to the sequence
H-H-H-P-P-H-P-H-P-P. The conformation of the protein chain is specified once
the spatial position of each of its amino acids is known. In the HP model space
is modeled as a regular lattice in two or three dimensions. Thus the conformation
of a length-k protein is a vector x = (x1 , x2 , . . . , xk ) where each xi is a lattice
point. Of course, neighbors in the backbone must also be neighbors on the lattice.
Figure 11 gives one possible conformation of the above length-10 protein in a
two-dimensional lattice model. Just like oil molecules in water, the hydrophobic
nature of the H-type amino acids will drive clusters together so as to minimize their
exposure to water. Thus we give a favorable energy [i.e., an energy of E (xi , xj ) =
−1] for each pair of H-type amino acids that are not neighbors in the backbone
but are lattice neighbors of each other in the conformation [see Figure 11(b)]. All
other neighbor pairs are neutral [i.e., having an energy contribution E (xi , xj ) = 0;
1614
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 11. One possible conformation of the length-10 proteins in a 2D lattice. H-type and P-type
amino acids are represented by black and gray squares, respectively.
see Figure 11(a)]. The energy of the conformation is given by
h(x) =
E (xi , xj ).
|i−j |>1
Since its introduction by Lau and Dill [19], the HP model has been extensively
studied and found to provide valuable insights [4]. We have applied equi-energy
sampling to study the HP model in two dimensions. Here we present some summary results to illustrate how our method can provide information that is not accessible to standard MC methods, such as the relative contribution of the entropy
to the conformational distribution, and the phase transition from disorder to order.
The detailed implementation of the algorithm, the full description and the physical
interpretations of the results are available in a separate paper [16].
Table 5 presents estimated (normalized) density of states at various energy
levels for a protein of length 20: H-P-H-P-P-H-H-P-H-P-P-H-P-H-H-P-P-H-P-H.
For this protein there are 83,770,155 possible conformations with energies ranging from 0 (completed unfolded chain) to −9 (folded conformations having the
maximum number of nine H-to-H interactions). The estimated and exact relative
frequencies of the energies in this collection of conformations are given in the
table. The estimates are based on five independent runs each consisting of one
million steps where the probability of proposing an equi-energy move is set to be
pee = 0.1. It is clear that the method yielded very accurate estimates of the density
of states at each energy level even though we have sampled only a small proportion of the population of conformations. The equi-energy move is important for the
success of the method: if we eliminate these moves, then the algorithm performs
very poorly in estimating the entropy at the low-energy end; for example, the estimated density of state at E = −9 becomes (1.545 ± 4.539) × 10−12 , which is four
orders of magnitude away from the exact value.
EQUI-ENERGY SAMPLER
1615
TABLE 5
The normalized density of states estimated from the EE sampler compared with the actual value
Energy
Estimated density
of states
Actual value
t-value
−9
−8
−7
−6
−5
−4
−3
−2
−1
0
(4.751 ± 2.087) × 10−8
(1.155 ± 0.203) × 10−6
(1.452 ± 0.185) × 10−5
(1.304 ± 0.189) × 10−4
(9.602 ± 1.332) × 10−4
(6.365 ± 0.627) × 10−3
(3.600 ± 0.228) × 10−2
(1.512 ± 0.054) × 10−1
(3.758 ± 0.044) × 10−1
(4.296 ± 0.071) × 10−1
4.774 × 10−8
1.146 × 10−6
1.425 × 10−5
1.237 × 10−4
9.200 × 10−4
6.183 × 10−3
3.514 × 10−2
1.489 × 10−1
3.779 × 10−1
4.309 × 10−1
−0.011
0.043
0.144
0.354
0.302
0.291
0.377
0.423
−0.474
−0.181
The t-value is defined as the difference between the estimate and the actual value divided by the
standard deviation.
We also use the equi-energy sampler to study phase transition from a disordered
state, where the conformational distribution is dominated by the entropy term and
the protein is likely to be in an unfolded state with high energy, to an ordered state,
where the conformation is likely to be compactly folded structures with low energy. We use the “minimum box size” (BOXSIZE) as a parameter to measure the
extent the protein has folded. BOXSIZE is defined as the size of the smallest possible rectangular region containing all the amino acid positions in the conformation.
For the 20-length protein, Figure 12 gives a plot of estimated Boltzmann averages
of BOXSIZE at ten different temperatures, which are available from a single run of
the equi-energy sampler using five energy ranges. We see that there is a rather sharp
transition from order (folded state) to disorder at the temperature range T = 0.25
to T = 1, with an inversion point around T = 0.5. In our energy scale, room temperature corresponds to T = 0.4 [16]. Thus at room temperature this length-20
protein will not always assume the minimum energy conformation; rather, it still
has a significant probability of being in high-energy, unfolded states. It is clear
from this example that the equi-energy sampler is capable of providing estimates
of many parameters that are important for the understanding of the protein folding
problem from a statistical mechanics and thermodynamics perspective.
7. Discussion. We have presented a new Monte Carlo method that is capable
of sampling from multiple energy ranges. By using energy truncation and matching temperature and step sizes to the energy range, the algorithm can explore the
energy landscape with great flexibility. Most importantly, the algorithm relies on a
new type of move—the equi-energy jumps—to reach regions of the sample space
that have energy similar to the current state but may be separated by steep energy
1616
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 12.
The Boltzmann average of BOXSIZE at different temperatures.
barriers. The equi-energy jumps provide direct access to these regions that are not
reachable with classic Metropolis moves.
We have also explained how to obtain estimates of the density of states and the
microcanonical averages from the samples generated by the equi-energy sampler.
Because of the duality between temperature-dependent parameters and energydependent parameters, the equi-energy sampler thus also provides estimates of
expectations under any fixed temperature.
Our method has connections with two of the most powerful Monte Carlo methods currently in use, namely parallel tempering and multicanonical sampling.
In our numerical examples, equi-energy sampling is seen to be more efficient
than parallel tempering and it provides estimates of quantities (e.g., entropy) not
accessible by parallel tempering. In this paper we have not provided direct numerical comparison of our method with multicanonical sampling. One potential
advantage over multicanonical sampling is that the equi-energy jumps allow us to
make use of conformations generated in the higher energy ranges to make movement across energy barriers efficiently. Thus equi-energy sampling “remembers”
energy-favorable configurations and makes use of them in later sampling steps.
By contrast, multicanonical sampling makes use of previous configurations only
in terms of the estimated density of states function. In this sense our method has
better memory than multicanonical sampling. It is our belief that equi-energy sampling holds promise for improved sampling efficiency as an all-purpose Monte
Carlo method, but definitive comparison with both parallel tempering and multicanonical sampling must await future studies.
EQUI-ENERGY SAMPLER
1617
In addition to its obvious use in statistical physics, our method will also be
useful to statistical inference. It offers an effective means to compute posterior
expectations and marginal distributions. Furthermore, the method provides direct
estimates of conditional expectations given fixed energy levels (the microcanonical averages). Important information on the nature of the likelihood or the posterior
distribution, such as multimodality, can be extracted by careful analysis of these
conditional averages. For instance, in Section 4 we see that the equi-energy sampler running on (12) reveals that there is a change point in the density of states as
well as the microcanonical averages [see Figures 6(c) and (d)], which clearly indicates the multimodality of the underlying distribution. We believe that the design
of methods for inferring the properties of the likelihood surface or the posterior
density, based on the output of the equi-energy sampler, will be a fruitful topic for
future investigations.
Acknowledgment. The authors thank Jason Oh for computational assistance
and helpful discussion. The authors are grateful to the Editor, the Associate Editor
and two referees for thoughtful and constructive comments.
REFERENCES
[1] BAILEY, T. L. and E LKAN , C. (1994). Fitting a mixture model by expectation maximization
to discover motifs in biopolymers. Proc. Second International Conference on Intelligent
Systems for Molecular Biology 2 28–36. AAAI Press, Menlo Park, CA.
[2] B ERG , B. A. and N EUHAUS , T. (1991). Multicanonical algorithms for first order phasetransitions. Phys. Lett. B 267 249–253.
[3] B ESAG , J. and G REEN , P. J. (1993). Spatial statistics and Bayesian computation. J. Roy. Statist.
Soc. Ser. B 55 25–37. MR1210422
[4] D ILL , K. A. and C HAN , H. S. (1997). From Levinthal to pathways to funnels. Nature Structural Biology 4 10–19.
[5] E DWARDS , R. G. and S OKAL , A. D. (1988). Generalization of the Fortuin–Kasteleyn–
Swendsen–Wang representation and Monte Carlo algorithm. Phys. Rev. D (3) 38
2009–2012. MR0965465
[6] G ELFAND , A. E. and S MITH , A. F. M. (1990). Sampling-based approaches to calculating
marginal densities. J. Amer. Statist. Assoc. 85 398–409. MR1141740
[7] G EMAN , S. and G EMAN , D. (1984). Stochastic relaxation, Gibbs distributions and the
Bayesian restoration of images. IEEE Trans. Pattern Analysis and Machine Intelligence
6 721–741.
[8] G EYER , C. J. (1991). Markov chain Monte Carlo maximum likelihood. In Computing Science
and Statistics: Proc. 23rd Symposium on the Interface (E. M. Keramidas, ed.) 156–163.
Interface Foundation, Fairfax Station, VA.
[9] G EYER , C. J. (1994). Estimating normalizing constants and reweighting mixtures in Markov
chain Monte Carlo. Technical Report 568, School of Statistics, Univ. Minnesota.
[10] G EYER , C. J. and T HOMPSON , E. (1995). Annealing Markov chain Monte Carlo with applications to ancestral inference. J. Amer. Statist. Assoc. 90 909–920.
[11] H ASTINGS , W. K. (1970). Monte Carlo sampling methods using Markov chains and their
applications. Biometrika 57 97–109.
[12] H IGDON , D. M. (1998). Auxiliary variable methods for Markov chain Monte Carlo with applications. J. Amer. Statist. Assoc. 93 585–595.
1618
S. C. KOU, Q. ZHOU AND W. H. WONG
[13] H UKUSHIMA , K. and N EMOTO , K. (1996). Exchange Monte Carlo and application to spin
glass simulations. J. Phys. Soc. Japan 65 1604–1608.
[14] J ENSEN , S. T., L IU , X. S., Z HOU , Q. and L IU , J. S. (2004). Computational discovery of gene
regulatory binding motifs: A Bayesian perspective. Statist. Sci. 19 188–204. MR2082154
[15] KONG , A., L IU , J. S. and W ONG , W. H. (1994). Sequential imputations and Bayesian missing
data problems. J. Amer. Statist. Assoc. 89 278–288.
[16] KOU , S. C., O H , J. and W ONG , W. H. (2006). A study of density of states and ground states
in hydrophobic-hydrophilic protein folding models by equi-energy sampling. J. Chemical
Physics 124 244903.
[17] KOU , S. C., X IE , X. S. and L IU , J. S. (2005). Bayesian analysis of single-molecule experimental data (with discussion). Appl. Statist. 54 469–506. MR2137252
[18] L ANDAU , D. P. and B INDER , K. (2000). A Guide to Monte Carlo Simulations in Statistical
Physics. Cambridge Univ. Press. MR1781083
[19] L AU , K. F. and D ILL , K. A. (1989). A lattice statistical mechanics model of the conformational
and sequence spaces of proteins. Macromolecules 22 3986–3997.
[20] L AWRENCE , C. E., A LTSCHUL , S. F., B OGUSKI , M. S., L IU , J. S., N EUWALD , A. F. and
W OOTTON , J. (1993). Detecting subtle sequence signals: A Gibbs sampling strategy for
multiple alignment. Science 262 208–214.
[21] L AWRENCE , C. E. and R EILLY, A. A. (1990). An expectation maximization (EM) algorithm
for the identification and characterization of common sites in unaligned biopolymer sequences. Proteins 7 41–51.
[22] L I , K.-H. (1988). Imputation using Markov chains. J. Statist. Comput. Simulation 30 57–79.
MR1005883
[23] L IANG , F. and W ONG , W. H. (2001). Real-parameter evolutionary Monte Carlo with applications to Bayesian mixture models. J. Amer. Statist. Assoc. 96 653–666. MR1946432
[24] L IU , J. S. (1994). The collapsed Gibbs sampler in Bayesian computations with applications to
a gene regulation problem. J. Amer. Statist. Assoc. 89 958–966. MR1294740
[25] L IU , J. S., N EUWALD , A. F. and L AWRENCE , C. E. (1995). Bayesian models for multiple local sequence alignment and Gibbs sampling strategies. J. Amer. Statist. Assoc. 90
1156–1170.
[26] L IU , X., B RUTLAG , D. L. and L IU , J. S. (2001). BioProspector: Discovering conserved DNA
motifs in upstream regulatory regions of co-expressed genes. In Pacific Symp. Biocomputing 6 127–138.
[27] M ARINARI , E. and PARISI , G. (1992). Simulated tempering: A new Monte Carlo scheme,
Europhys. Lett. 19 451–458.
[28] M ENG , X.-L. and W ONG , W. H. (1996). Simulating ratios of normalizing constants via a
simple identity: A theoretical exploration. Statist. Sinica 6 831–860. MR1422406
[29] M ETROPOLIS , N., ROSENBLUTH , A. W., ROSENBLUTH , M. N., T ELLER , A. H. and
T ELLER , E. (1953). Equations of state calculations by fast computing machines. J. Chemical Physics 21 1087–1091.
[30] M IRA , A., M OLLER , J. and ROBERTS , G. (2001). Perfect slice samplers. J. R. Stat. Soc. Ser.
B Stat. Methodol. 63 593–606. MR1858405
[31] N EAL , R. M. (2003). Slice sampling (with discussion). Ann. Statist. 31 705–767. MR1994729
[32] ROBERTS , G. and ROSENTHAL , J. S. (1999). Convergence of slice sampler Markov chains. J.
R. Stat. Soc. Ser. B Stat. Methodol. 61 643–660. MR1707866
[33] ROTH , F. P., H UGHES , J. D., E STEP, P. W. and C HURCH , G. M. (1998). Finding DNA regulatory motifs within unaligned noncoding sequences clustered by whole-genome mRNA
quantitation. Nature Biotechnology 16 939–945.
[34] S CHNEIDER , T. D. and S TEPHENS , R. M. (1990). Sequence logos: A new way to display
consensus sequences. Nucleic Acids Research 18 6097–6100.
EQUI-ENERGY SAMPLER
1619
[35] S ELA , M., W HITE , F. H. and A NFINSEN , C. B. (1957). Reductive cleavage of disulfide
bridges in ribonuclease. Science 125 691–692.
[36] S TORMO , G. D. and H ARTZELL , G. W. (1989). Identifying protein-binding sites from unaligned DNA fragments. Proc. Natl. Acad. Sci. USA 86 1183–1187.
[37] S WENDSEN , R. H. and WANG , J.-S. (1987). Nonuniversal critical dynamics in Monte Carlo
simulations. Phys. Rev. Lett. 58 86–88.
[38] TANNER , M. A. and W ONG , W. H. (1987). The calculation of posterior distributions by data
augmentation (with discussion). J. Amer. Statist. Assoc. 82 528–550. MR0898357
[39] T IERNEY, L. (1994). Markov chains for exploring posterior distributions (with discussion).
Ann. Statist. 22 1701–1762. MR1329166
[40] WANG , F. and L ANDAU , D. P. (2001). Determining the density of states for classical statistical
models: A random walk algorithm to produce a flat histogram. Phys. Rev. E 64 056101.
[41] Z HOU , Q. and W ONG , W. H. (2004). CisModule: De novo discovery of cis-regulatory modules
by hierarchical mixture modeling. Proc. Natl. Acad. Sci. USA 101 12114–12119.
S. C. KOU
Q. Z HOU
D EPARTMENT OF S TATISTICS
S CIENCE C ENTER
H ARVARD U NIVERSITY
C AMBRIDGE , M ASSACHUSETTS 02138
USA
E- MAIL : [email protected]
[email protected]
W. H. W ONG
D EPARTMENT OF S TATISTICS
S EQUOIA H ALL
S TANFORD U NIVERSITY
S TANFORD , C ALIFORNIA 94305-4065
USA
E- MAIL : [email protected]
The Annals of Statistics
2006, Vol. 34, No. 4, 1620–1628
DOI: 10.1214/009053606000000489
Main article DOI: 10.1214/009053606000000515
© Institute of Mathematical Statistics, 2006
DISCUSSION OF “EQUI-ENERGY SAMPLER” BY KOU,
ZHOU AND WONG
B Y Y VES F. ATCHADÉ AND J UN S. L IU
University of Ottawa and Harvard University
We congratulate Samuel Kou, Qing Zhou and Wing Wong (referred to
subsequently as KZW) for this beautifully written paper, which opens a new
direction in Monte Carlo computation. This discussion has two parts. First,
we describe a very closely related method, multicanonical sampling (MCS),
and report a simulation example that compares the equi-energy (EE) sampler
with MCS. Overall, we found the two algorithms to be of comparable efficiency for the simulation problem considered. In the second part, we develop
some additional convergence results for the EE sampler.
1. A multicanonical sampling algorithm. Here, we take on KZW’s discussion about the comparison of the EE sampler and MCS. We compare the EE sampler with a general state-space extension of MCS proposed by Atchadé and Liu [1].
We compare the two algorithms on the multimodal distribution discussed by KZW
in Section 3.4.
Let (X, B, λ) be the state space equipped with its σ -algebra and appropriate measure, and let π(x) ∝ e−h(x) be the density of interest. Following the notation of KZW, we let H0 < H1 < · · · < HKe < HKe +1 = ∞ be a sequence of
energy levels and let Dj = {x ∈ X : h(x) ∈ [Hj , Hj +1 )}, 0 ≤ j ≤ Ke , be the energy rings. For x ∈ X, define I (x) = j if x ∈ Dj . Let 1 = T0 < T1 < · · · < TKt
be a sequence of “temperatures.”
We use the notation k (i) (x) = e−h(x)/Ti , so that
π (i) (x) = k (i) (x)/ k (i) (x)λ(dx). Clearly, π (0) = π . We find it more convenient
to use the notation π (i) instead of πi as in KZW. Also note that we did not flatten
π (i) as KZW did.
The goal of our MCS method is to generate a Markov chain on the space X ×
{0, 1, . . . , Kt } with invariant distribution
π(x, i) ∝
Ke (i)
k (x)
j =0
Zi,j
1Dj (x)λ(dx),
where Zi,j = k (i) (x)1Dj (x)λ(dx). With a well-chosen temperature sequence
(Ti ) and energy levels (Hj ), such a Markov chain would move very easily from any
temperature level X × {i} to another. And inside each temperature level X × {i},
the algorithm would move very easily from any energy ring Dj to another. Unfortunately, the normalizing constants Zi,j are not known. They are estimated as
Received October 2005.
1620
1621
DISCUSSION
part of the algorithm using the Wang–Landau recursion that we describe below.
To give the details, we need a proposal kernel Qi (x, dy) = qi (x, dy)λ(dy) on X,
a proposal kernel (i, j ) on {0, . . . , Kt } and (γn ), a sequence of positive numbers.
We discuss the choice of these parameters later.
A LGORITHM 1.1 (Multicanonical sampling).
Initialization. Start the algorithm with some arbitrary (X0 , t0 ) ∈ X × {0, 1,
. . . , Kt }. For i = 0, . . . , Kt , j = 0, . . . , Ke we set all the weights to φ0(i) (j ) = 1.
(i)
Recursion. Given (Xn , tn ) = (x, i) and (φn (j )), flip a θ -coin.
If Tail. Sample Y ∼ Qi (x, ·). Set Xn+1 = Y with probability α (i) (x, Y ); otherwise set Xn+1 = x, where
(1.1)
(i)
k (i) (y) φn (I (x)) qi (y, x)
α (x, y) = min 1, (i)
.
k (x) φn(i) (I (y)) qi (x, y)
(i)
Set tn+1 = i.
If Head. Sample j ∼ (i, ·). Set tn+1 = j with probability βx (i, j ); otherwise
set tn+1 = i, where
(1.2)
βx (i, j ) = min 1,
k (j ) (x) φn(i) (I (x)) (j, i)
.
k (i) (x) φn(j ) (I (x)) (i, j )
Set Xn+1 = x.
Update the weights. Write (tn+1 , I (Xn+1 )) = (i0 , j0 ). Set
(i )
0
(j0 ) = φn(i0 ) (j0 )(1 + γn ),
φn+1
(1.3)
leaving the other weights unchanged.
If we choose Kt = 0 in the algorithm above we obtain the MCS of [9] (the first
MCS algorithm is due to [4]) and Ke = 0 gives the simulated tempering algorithm
of [6]. The recursion (1.3) is where the weights Zi,j are being estimated. Note that
the resulting algorithm is no longer Markovian. Under some general assumptions,
(i)
it is shown in [1] that θn (j ) :=
(i)
φn (j )
Kt Ke (i)
i=0 l=0 φn (l)
→
Dj
π (i) (x)λ(dx) as n → ∞.
The MCS can be seen as a random-scan-Gibbs sampler on the two variables
(x, i) ∈ X × {0, . . . , Kt }, so the choice θ = 1/2 for coin flipping works well.
The proposal kernels Qi can be chosen as in a standard Metropolis–Hastings
algorithm. But one should allow Qi to make larger proposal moves for larger i
(i.e., hotter distributions). The proposal kernel can be chosen as a random
1622
S. C. KOU, Q. ZHOU AND W. H. WONG
walk on {0, . . . , Kt } (with reflection on 0 and Kt ). In our simulations, we use
(0, 1) = (Kt , Kt − 1) = 1, (i, i − 1) = (i, i + 1) = 1/2 for i ∈
/ {0, Kt }.
It can be shown that the sequence (θn ) defined above follows a stochastic approximation with step size (γn ). So choosing (γn ) is the same problem as choosing a step-size sequence in a stochastic approximation algorithm. We follow the
new method proposed by Wang and Landau [9] where (γn ) is selected adaptively.
Wang and Landau’s idea is to monitor the convergence of the algorithm and adapt
the step size accordingly. We start with some initial value γ0 and (γn ) is defined by
γn = (1 + γ0 )1/(k+1) − 1 for τk < n ≤ τk+1 , where 0 = τ0 < τ1 < · · · is a sequence
of stopping times. Assuming τi finite, τi+1 is the next time k > τi where the occupation measures (obtained from time τi + 1 on) of all the energy rings in all
the temperature levels are approximately equal. Various rules can be used to check
that the occupation measures are approximately equal. Following [9], we check
that the smallest occupation measure obtained is greater than c times the mean occupation, where c is some constant (e.g., c = 0.2) that depends on the complexity
of the sampling problem.
It is an interesting question to know whether this method of choosing the stepsize sequence can be extended to more general stochastic approximation algorithms. A theoretical justification of the efficiency of the method is also an open
question.
2. Comparison of EE sampler and MCS. To use MCS to estimate integrals of interest such as Eπ0 (g(X)), one can proceed as KZW did by writing
e
Eπ0 (g(X)) = K
j =0 pj Eπ0 (g(X)|X ∈ Dj ). Samples from the high-temperature
chains can be used to estimate the integrals Eπ0 (g(X)|X ∈ Dj ) by importance
reweighting in the same way as KZW did. In the case of MCS, the probabilities
pj = Prπ0 (X ∈ Dj ) are estimated by p̂j =
(0)
φn (j )
.
(0)
l=0 φn (l)
Ke
We compared the performances of the EE sampler and the MCS described above
for the multimodal example in Section 3.4 of KZW. To make the two samplers
comparable, each chain in the EE sampler was run for N iterations. We did the
simulations for N = 104 , N = 5 × 104 and N = 10 × 104 . For the MC sampler,
we used Kt = Ke = K and the algorithm was run for (K + 1) × N total iterations. We repeated each sampler for n = 100 iterations in order to estimate the
finite sample standard deviations of the estimates they provided. Table 1 gives the
improvements (in percentage) of MCS over EE sampling. Prπ (X ∈ B) is the probability under π of the union of all the discs with centers µi (the means of the
mixture) and radius σ/2. As we can see, when estimating global functions such as
moments of the distribution, the two samplers have about the same accuracy with a
slight advantage for MCS. But the EE sampler outperformed MCS when estimating Prπ (X ∈ B). The MCS is an importance sampling algorithm with a stationary
distribution that is more widespread than π . This may account for the better performance obtained by the EE sampler on Prπ (X ∈ B). More thorough empirical
and theoretical analyses are apparently required to reach any firmer conclusions.
1623
DISCUSSION
TABLE 1
Improvement of MCS over EE as given by (σ̂EE (g) − σ̂MC (g))/σ̂MC (g) × 100
N = 104
N = 5 × 104
N = 105
E(X1 )
E(X2 )
E(X22 )
Prπ (X ∈ B)
13.77
6.99
1.92
12.53
−7.31
5.79
8.98
−10.15
4.99
−63.49
−51.22
−55.31
∗ The comparisons are based on 100 replications of the samplers for each N .
3. Ergodicity of the equi-energy sampler. In this section we take a more
technical look at the EE algorithm and derive some ergodicity results. First, we
would like to mention that in the proof of Theorem 2, it is not clear to us how
KZW derive the convergence in (5). Equation (5) implicitly uses some form of
convergence of the distribution of Xn(i+1) to π (i+1) as n → ∞ and it is not clear
(i+1)
(i+1)
= x) →
to us how that follows from the assumption that Pr(Xn+1 ∈ A|Xn
(i+1)
(x, A) as n → ∞ for all x, all A.
S
In the analysis below we fix that problem, but under a more stringent assumption. To state our result, let (X, B) be the state space of each of the equi-energy
chains. If P1 and P2 are two transition kernels
on X, the product P1 P2 is also
a transition kernel defined as P1 P2 (x, A) = P1 (x, dy)P2 (y, A). Recursively, we
define P1n as P11 = P1 and P1n = P1n−1 P1 . If f is a measurable
real-valued function on X
and µ is a measure on X, we denote Pf (x) := P (x, dy)f (y) and
µ(f ) := µ(dx)f (x). Also, for c ∈ (0, ∞) we write |f | ≤ c to mean |f (x)| ≤ c
for all x ∈ X. We define the following distance between P1 and P2 :
(3.1)
|||P1 − P2 ||| := sup sup |P1 f (x) − P2 f (x)|,
x∈X |f |≤1
where the supremum is taken over all x ∈ X and over all measurable functions
f : X → R with |f | ≤ 1. We say that the transition kernel P is uniformly geometrically ergodic if there exists ρ ∈ (0, 1) such that
(3.2)
|||P n − π||| = O(ρ n ).
It is well known that (3.2) holds if and only if there exist ε > 0, a nontrivial probability measure ν and an integer m ≥ 1 such that the so-called M(m, ε, ν) minorization condition holds, that is, P m (x, A) ≥ εν(A) for all x ∈ X and A ∈ B (see, e.g.,
(i)
[8], Proposition 2). We recall that TMH
denotes the Metropolis–Hastings kernel in
the EE sampler. The following result is true for the EE sampler.
(i)
T HEOREM 3.1. Assume that ∀ i ∈ {0, . . . , K}, TMH
satisfies a M(1, εi , π (i) )
minorization condition and that condition (iii) of Theorem 2 of the paper holds.
1624
S. C. KOU, Q. ZHOU AND W. H. WONG
Then for any bounded measurable function f , as n → ∞,
(3.3)
E f Xn(i) −→ π (i) (f )
and
n
(i) a.s.
1
f Xk −→ π (i) (f ).
n k=1
For example, if X is a compact space and e−h(x) remains bounded away from 0
and ∞, then (3.3) holds. Note that the ith chain in the EE sampler is actually
a nonhomogeneous Markov chain with transition kernels K0(i) , K1(i) , . . . , where
(i)
∈ A|Xn(i) = x]. As pointed out by KZW, for any x ∈ X
Kn(i) (x, A) := Pr[Xn+1
(i)
and A ∈ B, Kn (x, A) → S (i) (x, A) as n → ∞, where S (i) is the limit transition
kernel in the EE sampler. This setup brings to mind the following convergence
result for nonhomogeneous Markov chains (see [5], Theorem V.4.5):
T HEOREM 3.2. Let P , P0 , P1 , . . . be a sequence of transition kernels on
(X, B) such that |||Pn − P ||| → 0 and P is uniformly geometrically ergodic with
invariant distribution π . Then the Markov chain with transition kernels (Pi ) is
strongly ergodic; that is, for any initial distribution µ,
(3.4)
|||µP0 P1 · · · Pn − π||| → 0
as n → ∞.
The difficulty in applying this theorem to the EE sampler is that we do not have
(i)
(i)
|||Kn − S (i) ||| → 0 but only a setwise convergence |Kn (x, A) − S (i) (x, A)| → 0
for each x ∈ X, A ∈ B. The solution we propose is to extend Theorem 3.2 as
follows.
T HEOREM 3.3.
(X, B) such that:
Let P , P0 , P1 , . . . be a sequence of transition kernels on
(i) For any x ∈ X and A ∈ B, Pn (x, A) → P (x, A) as n → ∞.
(ii) P has invariant distribution π and Pn has invariant distribution πn . There
exists ρ ∈ (0, 1) such that |||P k − π||| = O(ρ k ) and |||Pnk − πn ||| = O(ρ k ).
(iii) |||Pn − Pn−1 ||| ≤ O(n−λ ) for some λ > 0.
Then, if (Xn ) is an X-valued Markov chain with initial distribution µ and transition kernels (Pn ), for any bounded measurable function f we have
(3.5) E[f (Xn )] −→ π(f )
and
n
1
a.s.
f (Xk ) −→ π(f )
n k=1
as n → ∞.
We believe that this result can be extended to the more general class of
V -geometrically ergodic transition kernels and then one could weaken the uniform
(i)
minorization assumption on TMH
in Theorem 3.1. But the proof will certainly be
more technical. We now proceed to the proofs of the theorems. We first prove
Theorem 3.3 and use it to prove Theorem 3.1.
1625
DISCUSSION
P ROOF OF T HEOREM 3.3. It can be easily shown from (ii) that |||πn −
1
πn−1 ||| ≤ 1−ρ
|||Pn − Pn−1 |||. Therefore, Theorems 3.1 and 3.2 of [2] apply and
assert that for any bounded measurable function f , E[f (Xn ) − πn (f )] → 0
a.s.
and n1 nk=1 [f (Xk ) − πk (f )] → 0 as n → ∞. To finish, we need to prove that
πn (f ) → π(f ) as n → ∞. To this end, we need the following technical lemma
proved in [7], Chapter 11, Proposition 18.
L EMMA 3.1. Let (fn ) be a sequence of measurable functions and let
µ, µ1 , . . . be a sequence of probability measures such that |fn | ≤ 1 and fn → f
pointwise [fn (x) →
f (x) for all x ∈ X] and µn → µ setwise [µn (A) → µ(A) for
all A ∈ B]. Then fn (x)µn (dx) → f (x)µ(dx).
Here is how to prove that πn (f ) → π(f ) as n → ∞. By (i), we have Pn f (x) →
Pf (x) for all x ∈ X. Then, by (i) and Lemma 3.1, Pn2 f (x) = Pn (Pn f )(x) →
P 2 f (x) as n → ∞. By recursion, for any x ∈ X and k ≥ 1, Pnk f (x) → P k f (x)
as n → ∞. Now, write
|πn (f ) − π(f )| ≤ |πn (f ) − Pnk f (x)| + |Pnk f (x) − P k f (x)|
+ |P k f (x) − π(f )|
(3.6)
≤ 2ρ k sup |f (x)| + |Pnk f (x) − P k f (x)|
[by (ii)].
x∈X
Since |Pnk f (x) − P k f (x)| → 0, we see that |πn (f ) − π(f )| → 0. P ROOF OF T HEOREM 3.1. Let (, F , P) be the probability triplet on which
the equi-energy process is defined and let E be its expectation operator. The result
is clearly true by assumption for i = K. Assuming that it is true for the (i + 1)st
chain, we will prove it for the ith chain.
(i)
The random process (Xn ) is a nonhomogeneous Markov chain with transition
(i)
(i)
kernel Kn (x, A) := Pr[Xn+1 ∈ A|Xn(i) = x]. For any bounded measurable func(i)
tion f , Kn operates on f as follows:
(i)
f (x) + pee E Rn(i) f (x) ,
Kn(i) f (x) = (1 − pee )TMH
where Rn(i) f (x) is a ratio of empirical sums of the (i + 1)st chain of the form
n
Rn(i) f (x) =
(3.7)
(i+1) (i)
)α (x, Xk(i+1) )f (Xk(i+1) )
k=−N 1DI (x) (Xk
n
(i+1)
)
k=−N 1DI (x) (Xk
n
+ f (x)
(i+1)
)(1 − α (i) (x, Xk(i+1) ))
k=−N 1DI (x) (Xk
n
(i+1)
)
k=−N 1DI (x) (Xk
1626
S. C. KOU, Q. ZHOU AND W. H. WONG
(i)
[take Rn f (x) = 0 and pee = 0 when
n
1
k=−N DI (x)
π (i) (y)π (i+1) (x)
(i+1)
(Xk
) = 0], where α (i) (x, y)
is the acceptance probability min[1, π (i) (x)π (i+1) (y) ]. N is how long the (i + 1)st
chain has been running before the ith chain started. Because (3.3) is assumed true
for the (i + 1)st chain and condition (iii) of Theorem 2 of the paper holds, we can
assume in the sequel that nk=−N 1DI (x) (Xk(i+1) ) ≥ 1 for all n ≥ 1. We prove the
theorem through a series of lemmas.
L EMMA 3.2.
For the EE sampler, assumption (i) of Theorem 3.3 holds true.
P ROOF. Because (3.3) is assumed true for the (i + 1)st chain, the strong
law of large numbers and Lebesgue’s dominated convergence theorem apply to
(i)
(i)
Rn f (x) and assert that for all x ∈ X and A ∈ B, Kn (x, A) → S (i) (x, A) as
(i,j )
(i)
n → ∞, where S (i) (x, A) = (1 − pee )TMH (x, A) + pee K
j =0 TEE (x, A)1Dj (x),
(i,j )
where TEE
tribution
is the transition kernel of the Metropolis–Hastings with proposal dis(i+1)
π (i+1) (y)1Dj (y)/pj
and invariant distribution
(i)
π (i) (x)1Dj (x)/pj .
L EMMA 3.3.
For the EE sampler, assumption (ii) of Theorem 3.3 holds.
(i)
(i)
P ROOF. Clearly, the minorization condition on TMH transfers to Kn . It then
(i)
(i)
follows that each Kn admits an invariant distribution πn and is uniformly geo(i)
metrically ergodic toward πn with a rate ρi = 1 − (1 − pee )εi . The limit transition
(i)
kernel S in the EE sampler as detailed above has invariant distribution π (i) and
(i)
also inherits the minorization condition on TMH
. L EMMA 3.4.
with λ = 1.
For the EE sampler, assumption (iii) of Theorem 3.3 holds true
n
α u
n n
P ROOF. Any sequence (xn ) of the form xn = k=1
can always be written
n
k=1 αn
α
n
recursively as xn = xn−1 + n α (un − xn−1 ). Using this, we easily have the
k=1 k
bound
(i)
1
K f (x) − K (i) f (x)
≤ 2E
n
n
n−1
(i+1)
)
k=−N 1DI (x) (Xk
for all x ∈ X and |f | ≤ 1. Therefore, the lemma will be proved if we can show
that
n
(3.8)
= O(1).
sup E (i+1)
n
0≤j ≤K
)
k=−N 1Dj (Xk
1627
DISCUSSION
To do so, we fix j ∈ {0, . . . , K} and take ε ∈ (0, δ), where δ = (1 − pee )εi+1 ×
π (i+1) (Dj ) > 0. We have
n
E n
(i+1)
)
k=−N 1Dj (Xk
=E n
(3.9)
n
1 n
(i+1)
)>n(δ−ε)}
k=−N 1Dj (Xk
(i+1) {
)
k=−N 1Dj (Xk
n
+E n
1 n
(i+1) {
)
k=−N 1Dj (Xk
(i+1)
)≤n(δ−ε)}
k=−N 1Dj (Xk
.
The first term on the right-hand side of (3.9) is bounded by 1/(δ − ε).
The second term is bounded by
n Pr
0
(i+1) 1Dj Xk
+
k=−N
(i+1) 1Dj Xk
− δ ≤ −nε
k=1
(3.10)
n
≤ n Pr Mn(i+1) ≥ nε ,
(i+1)
where Mn
=
n
(i+1)
(i+1)
k=1 Kk−1 (Xk−1 , Dj )
(i+1)
− 1Dj (Xk
). For the inequality
(i+1)
Kk−1 (x, Dj )
≥ δ. Now, the sein (3.10), we use the minorization condition
(i+1)
quence (Mn
) is a martingale with increments bounded by 1. By Azuma’s in(i+1)
equality ([3], Lemma 1), we have n Pr[Mn
≥ nε] ≤ n exp(−nε2 /2) → 0 as
n → ∞. Theorem 3.1 now follows from Theorem 3.3. REFERENCES
[1] ATCHADÉ , Y. F. and L IU , J. S. (2004). The Wang–Landau algorithm for Monte Carlo computation in general state spaces. Technical report.
[2] ATCHADÉ , Y. F. and ROSENTHAL , J. S. (2005). On adaptive Markov chain Monte Carlo
algorithms. Bernoulli 11 815–828. MR2172842
[3] A ZUMA , K. (1967). Weighted sums of certain dependent random variables. Tôhoku Math. J. (2)
19 357–367. MR0221571
[4] B ERG , B. A. and N EUHAUS , T. (1992). Multicanonical ensemble: A new approach to simulate
first-order phase transitions. Phys. Rev. Lett. 68 9–12.
[5] I SAACSON , D. L. and M ADSEN , R. W. (1976). Markov Chains: Theory and Applications.
Wiley, New York. MR0407991
[6] M ARINARI , E. and PARISI , G. (1992). Simulated tempering: A new Monte Carlo scheme.
Europhys. Lett. 19 451–458.
[7] ROYDEN , H. L. (1963). Real Analysis. Collier-Macmillan, London. MR0151555
[8] T IERNEY, L. (1994). Markov chains for exploring posterior distributions (with discussion).
Ann. Statist. 22 1701–1762. MR1329166
1628
S. C. KOU, Q. ZHOU AND W. H. WONG
[9] WANG , F. and L ANDAU , D. P. (2001). Efficient, multiple-range random walk algorithm to
calculate the density of states. Phys. Rev. Lett. 86 2050–2053.
D EPARTMENT OF M ATHEMATICS
AND S TATISTICS
U NIVERSITY OF OTTAWA
585 K ING E DWARD S TREET
OTTAWA , O NTARIO
C ANADA K1N 6N5
E- MAIL : [email protected]
D EPARTMENT OF S TATISTICS
S CIENCE C ENTER
H ARVARD U NIVERSITY
C AMBRIDGE , M ASSACHUSETTS 02138
USA
E- MAIL : [email protected]
The Annals of Statistics
2006, Vol. 34, No. 4, 1629–1635
DOI: 10.1214/009053606000000498
Main article DOI: 10.1214/009053606000000515
© Institute of Mathematical Statistics, 2006
DISCUSSION OF “EQUI-ENERGY SAMPLER” BY KOU,
ZHOU AND WONG
B Y M ING -H UI C HEN AND S UNGDUK K IM
University of Connecticut
1. Introduction. We first would like to congratulate the authors for their interesting paper on the development of the innovative equi-energy (EE) sampler.
The EE sampler provides a solution, which may be better than existing methods,
to a challenging MCMC sampling problem, that is, sampling from a multimodal
target distribution π(x). The EE sampler can be understood as follows. In the equienergy jump step, (i) points may move within the same mode; or (ii) points may
move between two modes; but (iii) points cannot move from one energy ring to
another energy ring. In the Metropolis–Hastings (MH) step, points move locally.
Although in the MH step, points may not be able to move freely from one mode
to another mode, the MH step does help a point to move from one energy ring to
another energy ring locally. To maintain certain balance between these two types
of operations, an EE jump probability pee must be specified. Thus, the MH move
and the equi-energy jump play distinct roles in the EE sampler. This unique feature makes the EE sampler quite attractive in sampling from a multimodal target
distribution.
2. Tuning and “black-box.” The performance of the EE sampler depends on
the number of energy and temperature levels, K, energy levels H0 < H1 < · · · <
HK < HK+1 = ∞, temperature ladders 1 = T0 < T1 < · · · < Tk , the MH proposal
distribution, the proposal distribution used in the equi-energy jump step and the
equi-energy jump probability pee . Based on our experience in testing the EE sampler, we felt that the choice of the Hk , the MH proposal and pee are most crucial
for obtaining an efficient EE sampler. In addition, the choice of these parameters is
problem-dependent. To achieve fast convergence and good mixing, the EE sampler
requires extensive tuning of K, Hk , MH proposal and pee in particular. A general
sampler is designed to be “black box” in the sense that the user need not tune
the sampler to the problem. Some attempts have been made for developing such
“black-box” samplers in the literature. Neal [4] developed variations on slice sampling that can be used to sample from any continuous distributions and that require
little or no tuning. Chen and Schmeiser [2] proposed the random-direction interiorpoint (RDIP) sampler. RDIP samples from the uniform distribution defined over
the region U = {(x, y) : 0 < y < π(x)} below the curve of the surface defined by
π(x), which is essentially the same idea used in slice sampling.
Received November 2005.
1629
1630
S. C. KOU, Q. ZHOU AND W. H. WONG
3. Boundedness. It is not clear why the target distribution π(x) must be
bounded. Is this a necessary condition required in Theorem 2? It appears that the
condition supx π(x) < ∞ is used only in the construction of energy levels Hk for
k > 0 for convenience. Would it be possible to relax such an assumption? Otherwise, the EE sampler cannot be applied to sampling from an unbounded π(x) such
as a gamma distribution with shape parameter less than 1.
If we rewrite
Dj = {x : h(x) ∈ [Hj , Hj +1 )} = x : π(x) ∈ exp(−Hj +1 ), exp(−Hj ) ,
we can see that D0 corresponds to the highest-density region. Thus, if H1 is appropriately specified, and the guideline given in Section 3.3 is applied to the choice of
the rest of the Hj ’s, the boundedness assumption on π(x) may not be necessary.
4. Efficiency. The proposed EE sampler requires K(B + N) iterations be(0)
fore it starts the lowest-order chain {Xn , n ≥ 0}. Note that here B is the number
of “burn-in” iterations and N is the number of iterations used in constructing an
empirical energy ring D̂jk . As it is difficult to determine how quickly a Markov
chain {Xn(k) } converges, a relatively large B may be needed. If the chain X (k) does
not converge, the acceptance probability given in Section 3.1 for the equi-energy
move at energy levels lower than k may be problematic. Therefore, the EE sampler
is quite inefficient as a large number of “burn-in” iterations will be wasted. This
may be particularly a problem when K is large. Interestingly, the authors never
disclosed what B and N were used in their illustrative examples. Thus, the choice
of B and N should be discussed in Section 3.3.
5. Applicability in high-dimensional problems. Based on the guideline of
the practical implementation provided in the paper, the number of energy levels
K could be roughly proportional to the dimensionality of the target distribution.
Thus, for a high-dimensional problem, K could be very large. As a result, the EE
sampler may become more inefficient as more “burn-in” iterations are required
and at the same time, it may be difficult to tune the parameters involved in the EE
sampler.
For example, consider a skewed link model for binary response data proposed
by Chen, Dey and Shao [1]. Let (y1 , y2 , . . . , yn ) denote an n × 1 vector of n independent dichotomous random variables. Let xi = (xi1 , . . . , xip ) be a p × 1 vector
of covariates. Also let (w1 , w2 , . . . , wn ) be a vector of independent latent variables. Then, the skewed link model is formulated as follows: yi = 0 if wi < 0
and 1 if wi ≥ 0, where wi = xi β + δzi + εi , zi ∼ G, εi ∼ F , zi and εi are independent, β = (β1 , . . . , βp ) is a p × 1 vector of regression coefficients, δ is the
skewness parameter, G is a known cumulative distribution function (c.d.f.) of a
skewed distribution, and F is a known c.d.f. of a symmetric distribution. To carry
out Bayesian inference for this binary regression model with a skewed link, we
1631
DISCUSSION
need to sample from the joint posterior distribution of ((wi , zi ), i = 1, . . . , n, β, δ)
given the observed data D. The dimension of the target distribution is 2n + p + 1.
When the sample size n is large, we face a high-dimensional problem. Notice that
the dimension of the target distribution can be reduced considerably if we integrate
out (wi , zi ) from the likelihood function. However, in this case, the resulting posterior distribution π(β, δ|D) contains many analytically intractable integrals, which
could make the EE sampler expensive or even infeasible to implement. The skewed
link model is only a simple illustration of a high-dimensional problem. Sampling
from the posterior distribution under nonlinear mixed-effects models with missing
covariates considered in [5] could be even more challenging.
In contrast, the popular Gibbs sampler may be more attractive and perhaps more
suitable for a high-dimensional problem because the Gibbs sampler requires only
sampling from low-dimensional conditional distributions. As MH sampling can be
embedded into a Gibbs step, would it be possible to develop an EE-within Gibbs
sampler?
6. Statistical estimation. In the paper, the authors proposed a sophisticated
but interesting Monte Carlo method to estimate the expectation Eπ0 [g(X)] under
the target distribution π0 (x) = π(x) using all chains from the EE sampler. Due to
the nature of the EE sampler, the state space X is partitioned according to the en
ergy levels, that is, X = K
j =0 Dj . Thus, this may be an ideal scenario for applying
the partition-weighted Monte Carlo method proposed by Chen and Shao [3]. Let
{Xi(0) , i = 1, 2, . . . , n} denote the sample under the chain X (0) (T = 1). Then, the
partition-weighted Monte Carlo estimator is given by
Êπ0 [g(X)] =
K
n 1
wj g Xi(0) 1 Xi(0) ∈ Dj ,
n i=1 j =0
(0)
(0)
where the indicator function 1{Xi ∈ Dj } = 1 if Xi ∈ Dj and 0 otherwise,
and wj is the weight assigned to the j th partition. The weights wj may be estimated using the combined sample, {X (k) , k = 1, 2, . . . , K}, under the πk for
k = 1, 2, . . . , K.
7. Example 1. We consider sampling from a two-dimensional normal mixture,
(7.1)
f (x) =
2
1 1
1
|i |−1/2 exp − (x − µi ) i−1 (x − µi )
2 2π
2
i=1
where
x = (x1 , x2 ) ,
µ1 = (0, 0),
µ2 = (5, 5)
,
1632
and
S. C. KOU, Q. ZHOU AND W. H. WONG
σ12 σ1 σ2 ρi
i =
σ1 σ2 ρi σ22
with σ1 = σ2 = 1.0, ρ1 = 0.99 and ρ2 = −0.99. The purpose of this example is to
examine performance of the EE sampler under a bivariate normal distribution with
value of the energy
a high correlation between X1 and X2 . Since the minimum
2
function h(x) = − log(f (x)) is around log(4πσ1 σ2 1.0 − ρi ) ≈ 0.573, we took
H0 = 0.5. K was set to 2. The energy ladder was set between Hmin and Hmin + 100
in a geometric progression, and the temperatures were between 1 and 60. The equienergy jump probability pee was taken to be 0.1. The initial states of the chain
X(i) were drawn uniformly from [0, 1]2 . The MH proposal was taken to be bivari(i)
ate Gaussian: Xn+1
∼ N2 (Xn(i) , τi2 Ti I2 ), where the MH proposal step size τi for
the ith-order chain X(i) was taken to be 0.5 such that the acceptance ratio was in
the range of (0.23, 0.29). The overall acceptance rate for the MH move in the EE
sampler was 0.26. We used 2000 iterations to burn in the EE sampler and then
generated 20,000 iterations. Figure 1 shows autocorrelations and the samples generated in each chain based on the last 10,000 iterations. We can see, from Figure 1,
that the EE sampler works remarkably well and the high correlations do not impose
any difficulty for the EE sampler at all.
8. Example 2. In this example, we consider another extreme and more challenging case, in which we assume a normal mixture distribution with different
variances. Specifically, in (7.1) we take
2
σi1
σi1 σi2 ρi
i =
2
σi1 σi2 ρi σi2
with σ11 = σ12 = 0.01, σ21 = σ22 = 1.0 and ρ1 = ρ2 = 0. Since the minimum
value of the energy function h(x) is around −6.679, we took H0 = −7.0. We
first tried the same setting for the energy and temperature ladders with K = 2,
pee = 0.1 and the MH proposal N2 (Xn(i) , τi2 Ti I2 ). The chain X (0) was trapped
around one mode and did not move from one mode to another at all. A similar
result was obtained when we set K = 4. So, it did not help to simply increase K.
(0)
One potential reason for this may be the choice of the MH proposal N2 (Xn , τ02 I2 )
at the lowest energy level. If τ0 is large, a candidate point around the mode with a
smaller variance is likely to be rejected. On the other hand, the chain with a small
τ0 may move more frequently, but the resulting samples will be highly correlated.
Intuitively, an improvement could be made by increasing K, tuning energy and
temperature ladders, choosing a better MH proposal and a more appropriate pee .
Several attempts along these lines were made to improve the EE sampler and the
results based on one of those trials are given below. In this attempt, K was set to 6,
DISCUSSION
F IG . 1.
1633
Plots of EE samples from a normal mixture distribution with equal variances.
and H1 = log(4π) + α = 2.53 + α, where α was set to 0.6. The energy ladder
was set between H1 and Hmin + 100 in a geometric progression, the temperatures were between 1 and 70, and pee = 0.5. The MH proposals were specified as
N2 (Xn(i) , τi2 Ti I2 ) for i > 0 and N2 (µ(Xn(0) ), (Xn(0) )) at the lowest energy level,
(0)
where µ(Xn ) was chosen to be the mode of the target distribution based upon the
(0)
(0)
location of the current point Xn and (Xn ) was specified in a similar fashion
as µ(Xn(0) ). We used 20,000 iterations to burn in the EE sampler and then generated 50,000 iterations. Figure 2 shows the plots of the samples generated in X (0)
based on all 50,000 iterations. The resulting chain had excellent mixing around
each mode, and the chain also did move from one mode to another mode. However, the chain did not move as freely as expected.
Due to lack of experience in using the EE sampler, we are not sure at this moment whether the EE sampler can be further improved for this example. If so, we
do not know how. We would like the authors to shed light on this.
1634
S. C. KOU, Q. ZHOU AND W. H. WONG
(0)
(0)
Normal mixture distribution with unequal variances. Samples of X (0) = (X1 , X2 )
(0)
(0)
around (a) mode (0, 0) and (b) mode (5, 5). The marginal sample paths of X1 (c) and X2 (d).
F IG . 2.
9. Discussion. The EE sampler is a potentially useful and effective tool for
sampling from a multimodal distribution. However, as shown in Example 2, the
EE sampler did experience some difficulty in sampling from a bivariate normal
distribution with different variances. For the unequal variance case, the guidelines
for practical implementation provided in the paper may not be sufficient. The statement, “the sampler can jump freely between the states with similar energy levels,”
may not be accurate as well.
As a uniform proposal was suggested for the equi-energy move, it becomes
apparent that the points around the modes corresponding to larger variances are
more likely to be selected than those corresponding to smaller variances. Initially,
we thought that an improvement might be made by assigning a larger probability to
the points from the mixand with a smaller variance. However, this would not work
as the resulting acceptance probability would become small. Thus, a more likely
selected point may be less likely to be accepted. It does appear that a uniform
proposal may be a good choice for the equi-energy move.
DISCUSSION
1635
REFERENCES
[1] C HEN , M.-H., D EY, D. K. and S HAO , Q.-M. (1999). A new skewed link model for dichotomous quantal response data. J. Amer. Statist. Assoc. 94 1172–1186. MR1731481
[2] C HEN , M.-H. and S CHMEISER , B. W. (1998). Toward black-box sampling: A randomdirection interior-point Markov chain approach. J. Comput. Graph. Statist. 7 1–22.
MR1628255
[3] C HEN , M.-H. and S HAO , Q.-M. (2002). Partition-weighted Monte Carlo estimation. Ann. Inst.
Statist. Math. 54 338–354. MR1910177
[4] N EAL , R. M. (2003). Slice sampling (with discussion). Ann. Statist. 31 705–767. MR1994729
[5] W U , L. (2004). Exact and approximate inferences for nonlinear mixed-effects models with
missing covariates. J. Amer. Statist. Assoc. 99 700–709. MR2090904
D EPARTMENT OF S TATISTICS
U NIVERSITY OF C ONNECTICUT
S TORRS , C ONNECTICUT 06269-4120
USA
E- MAIL : [email protected]
[email protected]
The Annals of Statistics
2006, Vol. 34, No. 4, 1636–1641
DOI: 10.1214/009053606000000470
Main article DOI: 10.1214/009053606000000515
© Institute of Mathematical Statistics, 2006
DISCUSSION OF “EQUI-ENERGY SAMPLER” BY KOU,
ZHOU AND WONG
B Y P ETER M INARY AND M ICHAEL L EVITT
Stanford University
Novel sampling algorithms can significantly impact open questions in
computational biology, most notably the in silico protein folding problem.
By using computational methods, protein folding aims to find the threedimensional structure of a protein chain given the sequence of its amino acid
building blocks. The complexity of the problem strongly depends on the protein representation and its energy function. The more detailed the model, the
more complex its corresponding energy function and the more challenge it
sets for sampling algorithms. Kou, Zhou and Wong have introduced a novel
sampling method, which could contribute significantly to the field of structural prediction.
1. Rough 1D energy landscape. Most of the energy functions describing offlattice protein models are assembled from various contributions, some of which
take account of the “soft” interactions between atoms (residues) far apart in sequence, while others represent the stiff connections between atoms directly linked
together with chemical bonds. As a consequence of this complex nature, the resulting energy function is unusually rough even for short protein chains.
The authors apply the equi-energy (EE) sampler to a multimodal two-dimensional model distribution, which is an excellent test for sampling algorithms. However, it lacks the characteristic features of distributions derived from complex
energy functions of off-lattice protein models. In studies conducted by Minary,
Martyna and Tuckerman [1], the roughness of such energy surfaces was represented by using a Fourier series on the interval [0, L = 10] [see Figure 1(a)],
h(x) = 2
(1)
20
c(i) sin(i2πx/L),
i=1
where the coefficients are
(c1 , c2 , . . . , c20 ) = (0.21, 1.25, 0.61, 0.25, 0.13, 0.10, 1.16, 0.18, 0.12, 0.23,
0.21, 0.19, 0.37, 0.99, 0.36, 0.02, 0.06, 0.08, 0.09, 0.04).
The performance of various sampling algorithms on the energy function, h(x), is
related to their ability to effectively locate the energy basins separated by large
Received November 2005.
1636
1637
DISCUSSION
F IG . 1. (a) The model system energy function, h(x) (dotted line), and the corresponding normalized
distribution, f (x), scaled by a constant, c = 200 (solid line). (b) Comparing distributions produced
by the EE sampler (EEMC) and parallel tempering (PT) to the target distribution (black) after 40,000
iterations in the interval [0, 8]. (c) Similar comparison in the intervals [8, 9.5] and [9.5, 10]. (d) Convergence rate f to the target distribution f (x) as a function of the number of iterations for the EE
sampler with energy disk sizes of 5,000 (solid black), 10,000 (dashed black) and 2,500 (dot-dashed
black). The same quantity is plotted for parallel tempering (gray). The distributions presented in
(b) and (c) are produced from statistics, collected up to 40,000 iterations (arrow).
energy barriers. In particular, previous studies by Minary, Martyna and Tuckerman [1] show that a superior convergence rate to the corresponding normalized
distribution,
L
1
f (x) = exp(−h(x)),
N=
(2)
exp(−h(x)) dx,
N
0
often correlates with enhanced sampling of more complex energy functions.
As a first test, the EE sampler with five Hybrid Monte Carlo chains (K = 4) was
applied to this problem. Hybrid Monte Carlo (HMC) [2] was used to propagate the
chains X (i) , as it generates more efficient moves guided by the energy surface gradient. Furthermore, it is well suited to complex high-dimensional systems because
it can produce collective moves. The initial values of the chains were obtained
from a uniform distribution on [0, L] and the MD step size was finely tuned, so
that the HMC acceptance ratio was in the range [0.4, 0.5]. Figure 1 shows that for
all x ∈ [0, L], h(x) > −10, so that H0 was set to −10. The energy levels, which
were chosen by geometric progression in the interval [−10, 10], are reported together with the temperature levels in Table 1. The EE jump probability pee was set
1638
S. C. KOU, Q. ZHOU AND W. H. WONG
TABLE 1
Sample size of energy rings
Energy rings
Chain
X (0) , T0 = 1.0
X (1) , T1 = 2.0
X (2) , T2 = 3.9
X (3) , T3 = 7.7
X (4) , T4 = 15.3
< −8.7
[−8.7, −7.5)
[−7.5, −5)
[−5.0, −0.2)
≥ −0.2
4295
2435
726
308
240
1981
1734
675
302
220
928
1622
1338
895
714
772
3526
6252
6847
7187
24
683
3009
5648
7639
to 0.15 and each chain was equilibrated for an initial period prior to the production sampling of 100,000 iterations. The sizes of the energy rings were bounded, as
computer memory is limited, especially when applying the EE sampler to structure
prediction problems. After their sizes reach the upper bound, the energy rings are
refreshed by replacing randomly chosen elements. In Table 1, the number of samples present in each energy ring after the initial burn-in period is summarized. It
shows that energy rings corresponding to lower-order chains are rich in low-energy
elements, whereas higher-order chains are rich in high-energy elements.
For benchmarking the performance of the EE sampler, parallel tempering (PT)
trajectories of the same length were generated using the same number of HMC
chains, temperature levels and exchange probabilities. The average acceptance ratio for EE jumps and replica exchange in PT was 0.82 and 0.45, respectively. Figures 1(b) and (c) compare the analytical distributions, f (x), with the numerical
ones produced by the EE sampler and PT after 40,000 iterations. All the minima
of f (x) are visited by both methods within this fraction of the whole sampling
trajectory. Quantitative comparison is obtained via the average distance between
the produced and analytical distributions,
(3)
f (fk , f ) =
N
1 |fk (xi ) − f (xi )|,
N i=1
where fk is the instantaneously computed numerical distribution at the kth iteration and N is the number of bins used. Figure 1(d) depicts f , as a function of the
number of MC iterations. It is clear that a substantial gain in efficiency is obtained
with the EE sampler, although the convergence rate is dependent on the maximum
size of energy disks.
2. Off-lattice protein folding in three dimensions. Efficient sampling and
optimization over a complex energy function are regarded as the most severe barrier to ab initio protein structure prediction. Here, we test the performance of
1639
DISCUSSION
the EE sampler in locating the native-like conformation of a simplified unitedresidue off-lattice β-sheet protein introduced by Sorenson and Head-Gordon [4]
based on the early works of Honeycutt and Thirumalai [3]. The model consists
of 46 pseudoatoms representing residues of three different types: hydrophobic (B),
hydrophilic (L) and neutral (N). The potential energy contains bonding, bending,
torsional and intermolecular interactions:
h=
46
kbond
i=2
(4)
+
2
46
(di − σ ) +
2
46
kbend
i=3
2
(θi − θ0 )2
[A(1 + cos φ) + B(1 + cos 3φ)]
i=4
+
46
VXY (rij ),
X, Y = B, L or N.
i=1,j ≥+3
Here, kbond = 1000εH Å−2 , σ = 1 Å, kbend = 20εH rad−2 , θ0 = 105◦ ; εH =
1000K (Kelvin); the torsional potentials have two types: if the dihedral angles involve two or more neutral residues, A = 0, B = 0.2εH (flexible angles),
and otherwise A = B = 1.2εH (rigid angles). The nonbonded interactions are
bead-pair specific, and are given by VBB = 4εH [(σ/rij )12 − (σ/rij )6 ], VLX =
8/3εH [(σ/rij )12 + (σ/rij )6 ] for X = B or L and VNX = 4ε[(σ/rij )12 ] with
X = B, L or N . This model and its energy function are illustrated in Figure 2.
A particular sequence of “amino acids,” (BL)2 B5 N3 (LB)4 N3 B9 N3 (LB)5 L, is
known to fold into a β-barrel conformation as its global minimum energy structure
with the potential energy function given above. Thus, this system is an excellent
test of various sampling algorithms such as the EE sampler or parallel tempering.
Since the native structure is known to be the global minimum (hmin ) on the energy
surface, H0 was set to hmin − 0.05|hmin |. The energy corresponding to the completely unfolded state (hunf ) serves as an approximate upper bound to the energy
function because all the favorable nonbonded interactions are eliminated. This is
true only if we assume that bond lengths and bend angles are kept close to their
ideal values and there are no “high-energy collisions” between nonbonded beads.
K was taken to be 8 so that nine HMC chains were employed.
First, the energy levels H1 , . . . , H8 were chosen to follow a geometric progression in [H0 , H8+1 = hunf ], but this produced an average EE jump acceptance ratio
of 0.5. In order to increase the acceptance, the condition for geometric progression
was relaxed. The following alternative was used: (a) create an energy ladder by using Hi+1 = Hi λ; (b) uniformly scale H1 , . . . , H8+1 so that H8+1 = hunf . Applying
this strategy and using a λ drawn from [1.1, 1.2] produced an average EE jump
acceptance ratio of ∼0.8. The equi-energy probability pee was set to 0.15 and the
parameters for the HMC chains X (i) were chosen in the same way as discussed in
the case of the 1D model problem.
1640
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 2. Comparing equi-energy Monte Carlo (EEMC) and parallel tempering (PT) to fold 3D
off-lattice β-sheet model proteins with known native structure. The figure shows the united-residue
model with three types of residues: hydrophobic (black), hydrophilic (gray) and neutral (light gray).
The energy function contains contributions from bonds, bends, torsions and intermolecular interactions, the last being attractive between hydrophobic–hydrophobic residues and repulsive otherwise.
The circular image in the center of the figure illustrates some of the ten initial structures, which were
generated by randomizing the torsions in the loop regions. These torsions are defined as the ones
which include more than two neutral residues. The three “RMSD from native vs. MC steps” subplots
contain representative trajectories starting from the three encircled configurations, whose distance
from the native state (sn ) was ∼ 3.0, 6.0 and 9.0 Å, respectively. The last subplot gives the probability that a visited structure is contained in the set Sx = {s : RMSD(s, sn ) ≤ x Å}, PT (gray) and
EEMC (black).
To test the ability of EEMC and PT to locate the native structure, ten initial
structures were obtained by randomly altering the loop region torsion angles. Then
both EEMC and PT trajectories starting from the same initial configurations were
generated. For each structure (s) the RMSD deviation from the native state (sn )
was monitored as a function of the number of MC iterations. The three representative trajectories depicted in Figure 2 start from initial structures with increasing
RMSD distance from the native structure. Some trajectories demonstrate the superior performance of the EE sampler over PT, since the native state is found with
fewer MC iterations. More quantitative comparison is provided by the probability
DISCUSSION
1641
distribution of the RMSD distance, P (x), which was based on a statistic collected
from all the ten trajectories. As Figure 2 indicates, the cumulative integral of the
distribution shows that 50% of the structures visited by the EE sampler are in S1.5
where Sx = {s : RMSD(s, sn ) ≤ x Å}. The corresponding number for PT is 25%.
These tests show that the EE sampler can offer sampling efficiency better than
that of other state-of-the-art sampling methods such as parallel tempering. Careful
considerations must be made when choosing the setting for the energy levels and
disk sizes for a given number of chains. Furthermore, we believe that proper utilization of the structural information stored in each energy disk could lead to the
development of novel, more powerful topology-based optimization methods.
REFERENCES
[1] M INARY, P., M ARTYNA , G. J. and T UCKERMAN , M. E. (2003). Algorithms and novel applications based on the isokinetic ensemble. I. Biophysical and path integral molecular
dynamics. J. Chemical Physics 118 2510–2526.
[2] D UANE , S., K ENNEDY, A. D., P ENDLETON , B. J. and ROWETH , D. (1987). Hybrid Monte
Carlo. Phys. Lett. B 195 216–222.
[3] H ONEYCUTT, J. D. and T HIRUMALAI , D. (1990). Metastability of the folded states of globular
proteins. Proc. Nat. Acad. Sci. USA 87 3526–3529.
[4] S ORENSON , J. M. and H EAD -G ORDON , T. (1999). Redesigning the hydrophobic core of a
model β-sheet protein: Destabilizing traps through a threading approach. Proteins: Structure, Function and Genetics 37 582–591.
D EPARTMENT OF S TRUCTURAL B IOLOGY
S TANFORD U NIVERSITY
S TANFORD , C ALIFORNIA 94305
USA
E- MAIL : [email protected]
[email protected]
The Annals of Statistics
2006, Vol. 34, No. 4, 1642–1645
DOI: 10.1214/009053606000000506
Main article DOI: 10.1214/009053606000000515
© Institute of Mathematical Statistics, 2006
DISCUSSION OF “EQUI-ENERGY SAMPLER” BY KOU,
ZHOU AND WONG
B Y Y ING N IAN W U AND S ONG -C HUN Z HU
University of California, Los Angeles
We congratulate Kou, Zhou and Wong for making a fundamental contribution
to MCMC. Our discussion consists of two parts. First, we ask several questions
about the EE-sampler. Then we review a data-driven MCMC scheme for solving
computer vision problems.
1. Questions. To simplify the language, we use π(x) to denote a distribution
we want to sample from, and q(x) to denote a distribution at a higher temperature
(with energy truncation). The distributions π(x) and q(x) can be understood as
two consecutive levels in the EE-sampler. Suppose we have obtained a sample
from q(x) by running a Markov chain (with a burn-in period), and let us call the
sampled states q-states. Suppose we have also formed the energy rings by grouping
these q-states. Now consider sampling from π(x) by the EE-sampler.
1. In the jump step, can we make the chain jump to a q-state outside the intended energy ring? For example, can we simply propose to jump to any random
q-states, as if performing the Metropolized independent sampler [2] with q(x) as
the proposal distribution? Without restricting the jump to the intended energy ring,
it is possible that the chain jumps to a q-state of a higher energy level than the
current state, but it is also possible that it lands on a lower-energy q-state.
If the energy of the current state is very low, we may not have any q-states in
the corresponding energy ring to make the EE jump. But if we do not restrict the
chain to the current energy ring, it may jump to a higher-energy q-state and escape
the local mode.
The reason we ask this question is that the power of the EE-sampler seems to
come from its reuse of the q-states, or the long memory of the chain, instead of the
EE feature.
2. Can we go up the distribution ladder in a serial fashion? In the EE-sampler,
when sampling π(x), the chain that samples q(x) keeps running. Can we run a
Markov chain toward q(x) long enough and then completely stop it, before going
up to sample π(x)? What is the practical advantage of implementing the sampler
in a parallel fashion, or is it just for proving theoretical convergence?
3. About the proof of Theorem 2, can one justify the algorithm by the
Metropolized independent sampler [2], where the proposal distribution is q(x)
Received November 2005.
1642
DISCUSSION
1643
truncated to the current energy range? Of course, there can be a reversibility issue. But in the limit this may not be a problem. In the authors’ proof, they also
seem to take such a limit. What extra theoretical insights or rigor can be gained
from this proof?
4. Can one obtain theoretical results on the rate of convergence? To simplify
the situation, consider a Markov chain with a mixture of two moves. One is the
regular local MH move. The other is to propose to jump from x to y with y ∼ q,
according to the Metropolized independent sampler. Liu [2] proves that the second
largest eigenvalue of the transition kernel of the Metropolized independent sampler
is 1 − minx π(x)/q(x). At first sight, this is a discouraging result: even if q(x) captures all the major modes of π(x) and takes care of the global structure, the chain
can still converge very slowly, because in the surrounding tail areas of the modes,
the ratio π(x)/q(x) may be very small. In other words, the rate of convergence can
be decided by high-energy x that are not important. However, we can regard q(x)
as a low-resolution approximation to π(x), so we should consider the convergence
on a coarsened grid of the state space, where the probability on a coarsened grid
point is the sum or integral of probabilities on the underlying finer grid points, so
the minimum probability ratio between coarsened π and q may not be very small.
The lack of resolution in the above scheme is taken care of by the local MH move.
So the two types of moves complement each other to take care of things at two
different scales. This seems also the case with the more sophisticated EE sampler.
2. Data-driven MCMC and Swendsen–Wang cut. Similar to EE-sampler,
making large jumps to escape local modes is also the motivation for the data-driven
(DD) MCMC scheme of Tu, Chen, Yuille and Zhu [3] for solving computer vision
problems.
Let I be the observed image data defined on a lattice , and let W be an interpretation of I in terms of what is where. One simple example is image segmentation: we want to group pixels into different regions, where the pixel intensities in
each region can be described by a coherent generative model. For instance, Figures
1 and 2 show two examples, where the left image is the observed one, and the right
F IG . 1.
Image segmentation.
1644
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 2.
Image segmentation.
image displays the boundaries of the segmented regions. Here W consists of the
labels of all the pixels: W = (Wi , i ∈ ), so that Wi = l if pixel i belongs to region
l ∈ {1, . . . , L}, where L is the total number of regions.
In a Bayesian formulation, we have a generative model: W ∼ p(W ) and
[I|W ] ∼ p(I|W ). Then image interpretation amounts to sampling from the posterior p(W |I). For the image segmentation problem, the prior p(W ) can be
something like the Potts model, which encourages identical labels for neighboring pixels. The model p(I|W ) can be such that in each region the pixel values
follow a two-dimensional low-order polynomial function plus i.i.d. noise.
To sample p(W |I), one may use a random-scan Gibbs sampler to flip the label
of one pixel at a time. However, such local moves can be easily trapped in local
modes. A DD-MCMC scheme is to cluster pixels based on local image features,
and flip all the pixels in one cluster together.
Specifically, for two neighboring pixels i and j , let pi,j = P (Wi = Wj |Fi,j (I)),
where Fi,j (I) is a similarity measure, for example, Fi,j (I) = |Ii − Ij |. In principle,
this conditional probability can be learned from training images with known segmentations. Then for each pair of neighboring pixels (i, j ) that belong to the same
region under the current state W = A, we connect i and j with probability pi,j .
This gives rise to a number of clusters, where each cluster is a connected graph
of pixels. We then randomly pick a cluster V0 (see Figure 3), and assign a single
F IG . 3.
Swendsen–Wang cut.
1645
DISCUSSION
(a)
F IG . 4.
(b)
(a) Top–down approach; (b) bottom-up approach.
label l to all the pixels in V0 with probability ql . One can design ql so that the
move is always accepted, very much like the Gibbs sampler. This is the basic idea
of the Swendsen–Wang cut algorithm of Barbu and Zhu [1], which is a special
case of DD-MCMC [4]. The algorithm is very efficient. Figures 1 and 2 show two
examples where the results are obtained in seconds, thousands of times faster than
the single-site Gibbs sampler.
Figure 4 illustrates the general situation for DD-MCMC. Part (a) illustrates the
model-based inference, where the top–down generative model p(W ) and p(I|W )
is explicitly specified. The posterior p(W |I) is implicit and may require MCMC
sampling. Part (b) illustrates the bottom-up operations, where some aspects of W
can be explicitly calculated based on some simple image features {Fk (I)}, without
an explicit generative model. The bottom-up approach may not give a consistent
and accurate full interpretation W , but it can be employed to design efficient moves
for sampling the posterior p(W |I) in the top–down approach. If vision is a bag
of bottom-up tricks, then DD-MCMC provides a principled scheme to bag these
tricks. The recent work of Tu, Chen, Yuille and Zhu [3] also incorporates boosting
into this MCMC scheme.
REFERENCES
[1] BARBU , A. and Z HU , S. C. (2005). Generalizing Swendsen–Wang to sampling arbitrary posterior probabilities. IEEE Trans. Pattern Analysis and Machine Intelligence 27 1239–1253.
[2] L IU , J. S. (1996). Metropolized independence sampling with comparisons to rejection sampling
and importance sampling. Statist. Comput. 6 113–119.
[3] T U , Z. W., C HEN , X. R., Y UILLE , A. L. and Z HU , S. C. (2005). Image parsing: Unifying
segmentation, detection and recognition. Internat. J. Computer Vision 63 113–140.
[4] T U , Z. W. and Z HU , S. C. (2002). Image segmentation by data-driven Markov chain Monte
Carlo. IEEE Trans. Pattern Analysis and Machine Intelligence 24 657–673.
D EPARTMENTS OF S TATISTICS
AND C OMPUTER S CIENCE
U NIVERSITY OF C ALIFORNIA
L OS A NGELES , C ALIFORNIA 90095
USA
E- MAIL : [email protected]
[email protected]
The Annals of Statistics
2006, Vol. 34, No. 4, 1646–1652
DOI: 10.1214/009053606000000524
Main article DOI: 10.1214/009053606000000515
© Institute of Mathematical Statistics, 2006
REJOINDER
B Y S. C. KOU , Q ING Z HOU AND W ING H. W ONG
Harvard University, Harvard University and Stanford University
We thank the discussants for their thoughtful comments and the time they have
devoted to this project. As a variety of issues have been raised, we shall present our
discussion in several topics, and then address specific questions asked by particular
discussants.
1. Sampling algorithms. The widely used state-of-the-art sampling algorithms in scientific computing include temperature-domain methods, such as
parallel tempering and simulated tempering, energy-domain methods, such as multicanonical sampling and the EE sampler, and methods involving expanding the
sampling/parameter space. The last group includes the Swendsen–Wang type algorithms for lattice models, as Wu and Zhu pointed out, and the group Monte
Carlo method [1]. If designed properly, these sampling-space-expansion methods
could be very efficient, as Wu and Zhu’s example in computer vision illustrated.
However, since they tend to be problem-specific, we did not compare the EE sampler with them. The comparison in the paper is mainly between the EE sampler
and parallel tempering. Atchadé and Liu’s comparison between the EE sampler
and the multicanonical sampling thus complements our result. It has been more
than 15 years since multicanonical sampling was first introduced. However, we
feel that there are still some conceptual questions that remain unanswered. In particular, the key idea of multicanonical sampling is to produce a flat distribution
in the energy domain. But we still do not have a simple intuitive explanation of
(i) why focusing on the energy works, (ii) why a distribution flat in the energy is
sought, and (iii) how such a distribution helps the sampling in the original sample space. The EE sampler, on the other hand, offers clear intuition and a visual
picture: the idea is simply to “walk” on the equi-energy sets, and hence focusing
on the energy directly helps avoid local trapping. In fact, the numerical results in
Atchadé and Liu’s comment clearly demonstrate the advantage of EE over multicanonical sampling in the 20 normal mixture example. Specifically, their Table 1
shows that in terms of estimating the probabilities of visiting each mode, the EE
sampler is about two to three times more efficient. We think that estimating the
probability of visiting individual modes provides a more sensitive measure of the
performance, the reason being that even if a sampler misses two or three modes in
each run, the sample average of the first and second moments could still be quite
Received December 2005.
1646
REJOINDER
1647
good; for example, missing one mode in the far lower left can be offset by missing
one mode in the far upper right in the sample average of the first moment, and
missing one faraway mode can be offset by disproportionately visiting much more
frequently another faraway mode in the sample average of the second moment, and
so on. Nevertheless, we agree with Atchadé and Liu that more studies (e.g., on the
benchmark phase transition problems in the Ising and Potts models) are needed to
reach a firmer conclusion.
2. Implementing the EE sampler for scientific computations. The EE sampler is a flexible and all-purpose algorithm for scientific computing. For a given
problem, it could be adapted in several ways.
First, we suggested in the paper that as a good initial start the energy and temperature ladders could be both assigned through a geometric progression. It is conceivable that for a complicated problem alternative assignments might work better,
as Minary and Levitt’s off-lattice protein folding example illustrated. A good assignment makes the acceptance rates of the EE jump comparably across the different chains, say all greater than 70%. This can be achieved by a small pilot run of
the algorithm, which can be incorporated into an automatic self-tuning implementation.
Second, the energy ladder and temperature ladder can be decoupled in the sense
that they do not need to always obey (Hi+1 − Hi )/Ti ≈ c. For example, for discrete problems such as the lattice phase transition models and the lattice protein
folding models, one could take each discrete energy level itself as an energy ring,
while keeping the temperatures as a monotone increasing sequence. In this case an
EE jump is always accepted, since it always moves between states with the same
energy level.
Third, the EE sampler can be implemented in a serial fashion as Wu and Zhu
commented. One could start the algorithm from X (K) , run for a predetermined
number of iterations, completely stop it and move on to X (K−1) , run it, completely
stop, move on to X (K−2) , and so on. This serial implementation offers the advantage of saving computer memory in that one only needs to record the states visited
in the chain immediately preceding the current one. The downside is that it will not
provide the users the option to online monitor and control (e.g., determine to stop)
the algorithm; instead, one has to prespecify a fixed number of iterations to run. In
the illustrative multimodal distribution in the paper and the example we include in
this rejoinder in Section 4, we indeed utilized the serial implementation since the
number of iterations for each chain was prespecified.
Fourth, the EE sampler constructs energy rings to record the footsteps of highorder chains. The fact that a computer’s memory is always finite might appear to
limit the number of iterations that the EE sampler can be run. But as Minary and
Levitt pointed out, this seeming limitation can be readily solved by first putting an
upper bound (subject to computer memory) on the energy ring size; once this upper
1648
S. C. KOU, Q. ZHOU AND W. H. WONG
bound is reached a new sample can be allocated to a specific energy ring by replacing a randomly chosen element in the ring. Minary and Levitt’s example involving
a rough one-dimensional energy landscape provides a clear demonstration.
Fifth, the key ingredient of the EE sampler is the equi-energy move, a global
move that compensates for the local exploration. It is worth emphasizing that
the local moves can adopt not only the Metropolis–Hastings type moves, but also
Gibbs moves, hybrid Monte Carlo moves as in Minary and Levitt’s example, and
even moves applied in molecular dynamic simulations, as long as the moves provide good explorations of the local structure.
Sixth, the equi-energy move jumps from one state to another within the same
energy ring. As Wu and Zhu commented, it is possible to conduct moves across
different energy rings. It has pros and cons, however. It might allow the global jump
a larger range, and at the same time it might also lead to a low move acceptance
rate, especially if the energy of the current state differs much from that of the
proposal jump state. The latter difficulty is controlled in the equi-energy jump of
the EE sampler, since it always moves within an energy ring, where the states all
have similar energy levels. One way to enhance the global jump range and rein in
the move acceptance rate is to put a probability on each energy ring in the jump
step. Suppose the current state is in ring Dj . One can put a distribution on the ring
index so that the current ring Dj has the highest probability to be chosen, and the
neighboring rings Dj −1 and Dj +1 have probabilities less than that of Dj to be
chosen, and rings Dj −2 and Dj +2 have even smaller probabilities to be chosen,
and so on. Once a ring is chosen, the target state is proposed uniformly from it.
3. Theoretical issues. We thank Atchadé and Liu for providing a more probabilistic derivation of the convergence of the EE sampler that complements the one
we gave in the paper. While these results assure the long-run correctness of the
sampler, we agree, however, with Wu and Zhu that investigating the convergence
speed is theoretically more challenging and interesting, as it is the rate of convergence that separates different sampling algorithms. So far the empirical evidence
supports the EE sampler’s promise, but definitive theoretical results must await
future studies.
In addition to facilitating the empirically observed fast convergence, another
advantage offered by the idea of working on the equi-energy sets is that it allows
efficient estimation by utilizing all the samples from all the chains on an energyby-energy basis (as discussed in Section 5 of the paper). We thus believe that the
alternative estimation strategy proposed by Chen and Kim is very inefficient, because it essentially wastes all the samples in the chains other than the target one.
To make the comparison transparent, suppose we want to estimate the probability
of a rare event under the target distribution Pπ0 (X ∈ A). Chen and Kim’s formula
would give
K
n (0)
1
P̂ =
wj 1 Xi ∈ A ∩ Dj .
n i=1 j =0
REJOINDER
1649
But since Pπ0 (X ∈ A) is small, say less than 10−10 , there is essentially no sample
falling into A in the chain X (0) , and correspondingly P̂ would be way off no matter
how cleverly wj is constructed. The fact that the high-order chains X (j ) could well
have samples in the set A (due to the flatness of πj ) does not help at all in Chen
and Kim’s strategy. But in the EE estimation method such high-order-chain samples are all employed. The tail probability estimation presented in Section 5 and
Table 4 illustrates the point. The reason that the EE estimation method is much
more efficient in this scenario is due to the well-known fact that in order to accurately estimate a rare event probability importance sampling has to be used and
the fact that the EE strategy automatically incorporates importance sampling in its
construction. We also want to point out that rare event estimation is an important
problem in science and engineering; examples include calculating surface tension
in phase transition in physics, evaluating earthquake probability in geology, assessing the chance of bankruptcy in insurance or bond payment default in finance,
estimating the potentiality of traffic jams in telecommunication, and so on.
4. Replies to individual discussants. We now focus on some of the individual points raised. Minary and Levitt’s discussion has been covered in Sections
1 and 2 of this rejoinder, as was Wu and Zhu’s in Sections 1 to 3; we are sorry that
space does not permit us to discuss their contributions further.
Atchadé and Liu questioned the derivation of (5) of the paper. This equation,
we think, arises directly from the induction assumption, and does not use any assumption on X (i+1) explicitly or implicitly. We appreciate their more probabilistic
proof of the convergence theorem.
Chen and Kim asked about the length of the burn-in period in the examples. In
these examples the burn-in period consists of 10% to 30% of the samples. We note
that this period should be problem-dependent. A rugged high-dimensional energy
landscape requires longer burn-in than a smooth low-dimensional one. There is no
one-size-fits-all formula.
In the discussion Chen and Kim appeared to suggest that the Gibbs sampler is
preferred in high-dimensional problems. But our experience with the Gibbs sampler tells a different story. Though simple to implement, in many cases the Gibbs
sampler can be trapped by a local mode or by a strong correlation between the
coordinates—the very problems that the modern state-of-the-art algorithms are
trying to tackle.
We next consider the needle-in-the-haystack example raised in Chen and Kim’s
discussion, in which the variances of the normal mixture distribution differ dramatically. Figure 1(a) shows the density function of this example. We implemented the
EE sampler using four chains (i.e., K = 3) and 200,000 iterations per chain after
a burn-in period of 50,000 iterations. Following the energy ladder setting used in
Chen and Kim, we set H1 = 3.13; the other energy levels were set between H1 and
Hmin + 100 (= 93) in a geometric progression: H1 = 3.13, H2 = 8.3, H3 = 26.8.
1650
S. C. KOU, Q. ZHOU AND W. H. WONG
F IG . 1. The artificial needle-in-the-haystack example. (a) The density function of the target distri(0)
bution. (b) The sample path of X1 from a typical run of the EE sampler. (c) The samples generated
at both modes. Note the mode at the origin. (d) The samples generated near the mode at the origin.
(i)
The MH proposals were specified as N2 (Xn , τi2 Ti I2 ), where Ti (i = 0, . . . , K)
is the temperature of the ith chain. We set τi = 1 for i > 0 and τ0 = 0.05. The
probability of equi-energy jump pee = 0.3. With all the above parameters fixed in
our simulation, we tested the EE sampler with different highest temperatures TK ,
whereas the remaining temperatures were evenly distributed on the log-scale between TK and T0 = 1. We tried TK =10, 20, 30, 50 and 100; with each parameter
setting the EE sampler was performed independently 100 times. From the target
chain X(0) we calculated
P̂ =
n
(0) 2 (0) 2
1
1 Xi1 + Xi2 < 0.05 ,
n i=1
the probability of visiting the mode at the origin. From the summary statistics in
Table 1, we see that (i) the performance of EE is quite stable with an MSE between 0.04 and 0.06 for different temperature ladders; (ii) more than 98% of the
times EE did jump between the two modes. In order to assess the performance of
1651
REJOINDER
TABLE 1
Summary statistics of EE and PT for the needle-in-the-haystack example
E(P̂ )
std(P̂ )
5%
95%
MSE
# Jump
# Miss
EE(N
EE(N
EE(N
EE(N
EE(N
EE(N
= 200, TK = 10)
= 200, TK = 20)
= 200, TK = 30)
= 200, TK = 50)
= 200, TK = 100)
= 50, TK = 30)
0.3740
0.4298
0.4567
0.3958
0.4396
0.3077
0.2119
0.2048
0.1973
0.2172
0.2122
0.3163
0.0289
0.0556
0.1188
0.0223
0.0986
0
0.7020
0.7492
0.7440
0.6939
0.7762
0.8149
0.0603
0.0464
0.0404
0.0576
0.0482
0.1361
36.61
40.35
43.14
39.16
39.19
6.83
1
2
0
2
0
36
PT(N
PT(N
PT(N
PT(N
PT(N
= 200, TK
= 200, TK
= 200, TK
= 200, TK
= 200, TK
= 10)
= 20)
= 30)
= 50)
= 100)
0.4241
0.4437
0.4664
0.4793
0.4291
0.2971
0.2692
0.3181
0.3093
0.2972
0
0.0000
0
0
0
0.9276
0.9476
0.9979
0.9204
0.9772
0.0932
0.0749
0.1013
0.0951
0.0925
364.07
157.18
104.20
63.47
36.02
7
4
6
6
7
Tabulated are the mean, standard deviation, 5% and 95% quantiles, and MSE of P̂ in 100 independent
runs. Also reported here are the average number of jumps between the two modes and the total
number of runs in which the sampler missed the mode at the origin. N is the number of iterations for
each chain in units of 1000 after the burn-in period.
EE on this problem, we also applied PT under exactly the same settings including
the numbers of chains and iterations, the temperature ladders and the exchange
probability (pex = pee = 0.3). It turns out that with all the different temperature
ladders PT never outperformed even the worst performance of EE (TK = 10) in
MSE (Table 1). From the best performance of the two methods, that is, EE with
TK = 30 and PT with TK = 20, one sees that (i) the MSE of EE is about 54% of
that of PT; (ii) the spread of the estimated probability is smaller for EE than for PT
[see the standard deviation and (5%, 95%) quantiles]. We selected a typical run of
EE in the sense that the frequency of jump between the two modes of this run is
approximately the same as the average frequency, and we plotted the samples in
Figure 1. The chain mixed well in each mode and the cross-mode jump is acceptable. Even in this artificially created extreme example of a needle in the haystack
the performance of EE is still quite satisfactory with only four chains (K = 3).
It is worth emphasizing that we did not even fine-tune the energy or temperature
ladders—they are simply set by a geometric progression.
But we do want to point out that one can always cook up extreme examples to
defeat any sampling algorithm. For instance, one can hide two needles miles apart
in a high-dimensional space, and no sampling algorithm is immune to this type
of extreme example. In fact in Chen and Kim’s example, if we ran EE with only
50,000 iterations (after the burn-in period) with TK = 30, the resulting MSE increased to 0.136 and 36% of the times EE missed the needle completely (Table 1).
1652
S. C. KOU, Q. ZHOU AND W. H. WONG
5. Concluding remarks. We thank all the discussants for their insightful contributions. We appreciate the efforts of the Editor and the Associate Editor for
putting up such a platform for exchanging ideas. We hope that the readers will
enjoy as much as we did reading these comments and thinking about various scientific, statistical and computational issues raised.
REFERENCE
[1] L IU , J. S. and S ABATTI , C. (2000). Generalised Gibbs sampler and multigrid Monte Carlo for
Bayesian computation. Biometrika 87 353–369. MR1782484
S. C. KOU
Q. Z HOU
D EPARTMENT OF S TATISTICS
H ARVARD U NIVERSITY
S CIENCE CENTER
C AMBRIDGE , M ASSACHUSETTS 02138
USA
E- MAIL : [email protected]
[email protected]
W. H. W ONG
D EPARTMENT OF S TATISTICS
S EQUOIA H ALL
S TANFORD U NIVERSITY
S TANFORD , C ALIFORNIA 94305-4065
USA
E- MAIL : [email protected]