Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
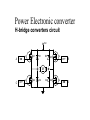
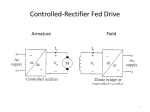
Elevator Drives - Discussion • • • • • History Requirements Motor and Control Types Industry Trends Future Drives History • 236 BC – First Passenger Lift, Archimedes • 1853 – Safe Elevator Demo, Elisha Otis • 1857 – First Safe Elevator Installation, Cooper Union, NYC • 1861 – Otis Elevator Patent Otis Patent 1861 History • 1873 – First Modern DC Motor • 1874 – J. W. Meaker Door Opener Patent • 1880 – First Electric Motor Controlled Elevator Siemens / Sprague • 1882-1889 – Tesla AC Induction Motor 3-Phase Squirrel Cage Design • 1889 – Otis Elevator Uses DC Motor Otis DC Elevator Motor Circa 1889 History • 1891 – Ward Leonard Variable Speed Control – AC Induction Motor Turning DC Dynamo – Rheostat to Control Generated Voltage – DC Voltage Controls DC Motor Speed • 1900-1970’s – Ward-Leonard M-G Sets and DC Motors Used for Variable Speed Elevators • AC Motors Used 1 and 2 Speed Starters Otis No. 1 Geared DC Machine with DC Motor Circa 1915 Otis Gearless DC Machine Circa 1919 M-G Set Controls (Otis Elevator, 1920’s) Otis Type 84 26 Broadway,NYC Circa 1930’s History • 1975-Present – Thyristor (SCR) DC Drives Control Elevators – All Analog Components in the 70’s – Replaces Aging M-G Sets • 1980’s – Microprocessors Improve – Car Dispatch and Motor Drive Controllers Otis type 84,NYC with Encoder Westinghouse #205 with Encoder History • Late 1980’s – – Variable Frequency Inverters AC Induction Motors, Geared Applications Only • Early 1990’s – – More AC Inverters and Motors Begin to Displace Small DC, 3-15 HP • Mid-1990’s – – Vector Control AC Inverters 10-40 HP Almost as Good as SCR-DC. – KONE Introduces PM EcoDisc AC Machine History Late 1990’s – – Custom Gearless AC Induction Machines – First Fully Regenerative AC Elevator Drives – Much Discussion on PM-AC and MRL – SCR-DC Still Used for Medium and Large Building Mods History 2000-Present – – More PM-AC Motor Manufacturers. PM Gearless Begins to Replace AC Geared – EU Focus on Efficiency and Harmonics/EMC – Lower Cost IGBT Inverter Components – North America Begins to Focus on Energy Reduction – New Construction Leaning toward AC – SCR-DC Still Used on Medium-Large Building Mods Four Quadrant Operation LSC Umot, Imot Linear power stage Vcc time controller R M Gnd UT Umot advantages – simple, low priced controller – low electromagnetic noise level – no minimum inductance needed disadvantages – high power losses at the final stage at high currents or low motor voltages (PV = R I2) – for small nominal power up to 100 W advantages Pulsed power stage (PWM) V – low power losses – high efficiency – for higher nominal power disadvantages – electromagnetic noise in the radio frequency range – high power losses in the motor at standstill cc pulse generator Gnd Umot, Imot Umot M power stage ADS, DEC, AECS, DES, MIP, PCU, EPOS time cycle time: 20 - 50 ms Imax Pulsed power stage: current general measures: ripple V reduce motor voltage cc 2 fS (Lmot L choke ) enhance total inductance - motor choke in controller - additional motor choke enhance PWM frequency 50% 50% low motor inductance additional motor choke Umot, Imot 30% 70% frequency kHz 50 Time scales in1 control loops 10 5 2 0.5 0.2 0.1 0.05 20 mechanical time constants "slow" position controller position controller MIP speed controller speed controller as "link" between fast current controller and a slow position control (PLC) current controller PWM cycle time 0.02 0.05 0.1 0.2 0.5 1 2 5 10 20 ms cycle time PWM • PWM(Pulse Width Modulation • Cambiando il duty cycle, la velocità cambierà Lo scopo è : 1. Ridurre la dissipazione di potenza. 2. Ridurre I problemi di raffreddamento dei transistors) Duty Cycle 20% Lowest Speed Cycle Duty Cycle 50% Middle Speed Duty Cycle (DT) Duty Cycle = DT / T (%) Figure : PWM Control Signal Duty Cycle 80% High Speed Duty cycle • si definisce duty cycle d il rapporto tra la durata del segnale "alto" ed il periodo totaleT del segnale, e serve ad esprimere per quanta porzione di periodo il segnale è a livello alto: t d T • PWM Un segnale PWM (Pulse Width Modulation ovvero modulazione a variazione della larghezza d'impulso) è un' onda quadra di duty cycle variabile che permette di controllare l'assorbimento (la potenza assorbita) di un carico elettrico(nel nostro caso il motore DC), variando modulando) il duty cycle. • Un segnale PWM è caratterizzato dalla frequenza (fissa) e dal duty cycle (variabile); • si deduce dalla Figura, il duty cycle è il rapporto tra il tempo in cui l'onda assume valore alto e il periodo T (l'inverso della frequenza: T=1/f) • Es. un duty cycle dell'80% corrisponde ad un'onda quadra che assume valore alto per l'80% del tempo e basso per il restante 20%, DC Motor Drives DC motor speed control using Switching Control or PWM Voltage Source Vs Vout Diode rectifier Filter capacitor P ulse Widt h %Dut y cycle = x 100 Cycle Full-bridge DC-DC converter PWM Pluse-width-modulation Vout = % Duty cycle x Vs M Power Electronic converter H-bridge converters circuit Vcc A ON G Q1 D1 D3 Q3 G D2 Q2 G OFF B ON D M C OFF G Q4 D4