Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Time-to-digital converter wikipedia , lookup
Cavity magnetron wikipedia , lookup
Ground (electricity) wikipedia , lookup
Electromagnetic compatibility wikipedia , lookup
Electric power system wikipedia , lookup
Power over Ethernet wikipedia , lookup
Electrification wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Electrical ballast wikipedia , lookup
Chirp compression wikipedia , lookup
Current source wikipedia , lookup
Spark-gap transmitter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Transformer wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Three-phase electric power wikipedia , lookup
Power engineering wikipedia , lookup
Power inverter wikipedia , lookup
Electrical substation wikipedia , lookup
Power MOSFET wikipedia , lookup
Resonant inductive coupling wikipedia , lookup
Stray voltage wikipedia , lookup
Voltage regulator wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Surge protector wikipedia , lookup
Distribution management system wikipedia , lookup
History of electric power transmission wikipedia , lookup
Opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Voltage optimisation wikipedia , lookup
Buck converter wikipedia , lookup
Alternating current wikipedia , lookup
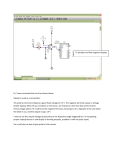
AN ASSESSMENT ON KLYSTRON MODULATOR TOPOLOGIES FOR THE ESS PROJECT C. A. Martins(*), K. Rathsman(**) (*) - Laval University, Dept. of Electrical and Computers Engineering, Québec, QC, Canada - European Spallation Source (ESS), Accelerator Division, PO Box 176, Lund, Sweden (**) Abstract The European Spallation Source (ESS) is a joint European project. ESS will be a world-leading centre for materials research and life science with neutrons and will host the World’s most powerful neutron source. A superconducting LINAC will be required to accelerate proton beams at energy levels up-to 2.5 GeV. About 200 klystrons will be required which will be supplied individually by pulsed modulators of the solid state type. The nominal parameters for the initial test stand prototype are -115kV/21A, 3.5ms/14Hz. The state of the art of solid state pulsed klystron modulators suited for long pulse applications (>100 µs) is reported. This will include a descriptive study of the different solutions envisaged which are based on the following topologies: a)- Monolithic pulse transformer based; b)- Direct switch; c)- Marx generator; d)Interleaved multi-level converters association; e)- Multilevel resonant converters association. These topologies will be qualitatively assessed on the context of the ESS project taking items like reliability, maintainability, reparability, efficiency, and safety as comparative criteria. LINAC [2] delivers 5 MW of power to the target at 2500 MeV, with a nominal current of 50 mA. The reliability is one of the most challenging parameters to achieve, with a target value of at least 95% for the whole physics complex. This will translate directly on reliability requirements for the different LINAC equipment, like klystron modulators. Redundant operation schemes will be defined at the levels of cavities, klystrons and modulators. The maximum allowed beam losses (1W/m) is another demanding parameter, particularly for the low energy sections. The LINAC main parameters and layout are resumed in Table 1 and Figure 1, respectively. Table 1. Key parameters of the ESS Linac Particle species protons Proton energy range 1 to 2.5 GeV Pulse frequency range 10 to 20 Hz Pulse length range 0.8 to 3.5 ms Beam power, nominal 5 MW Beam on target availability > 95 % Beam loss ~ 1 W/m I. THE EUROPEAN SPALLATION SOURCE PROJECT The European Spallations Source (ESS) [1] is a joint European project, presently formed by 17 European member states, intended to be an international facility dedicated to applied scientific research in several fields like chemistry, nano and energy technology, environmental engineering, foodstuff, bioscience, pharmaceuticals, IT, materials and engineering science, archaeology where neutron beams will be used to probe various materials. Due to their unique properties neutrons are gentle probes that can penetrate deep into materials without causing damage, providing detailed information on crystallographic structure, atomic and molecular dynamics and magnetic properties. II. THE ESS SUPERCONDUCTING LINAC A high current superconducting proton LINAC, with an approximate length of 450 m, will be used to accelerate beams of protons which will be projected into a fixed target, generating neutrons from the interaction. The Figure 1. Sections of the ESS Linac III. MAIN PARAMETERS OF THE ESS KLYSTRON MODULATORS The main electrical parameters of the ESS klystron modulators are reported in Table 2. It is estimated that a total quantity of 200 units will be required for the whole LINAC. The rise/fall times will have an impact on the energy lost before and after the flat-top (cavities are started to be filled only once the voltage pulse is flat within the required precision) and shall therefore not exceed 10% of the pulse length. Droop and low frequency oscillations can be easily compensated by the LLRF in closed feedback loop. However, in order to reduce the amount of energy dissipated in the klystron collector this value shall be within 1% of the voltage pulse amplitude. High Frequency ripple (above 1 kHz) cannot be compensated by the LLRF due to its relatively low regulation bandwidth and is therefore specified to be lower than 0.02% (200 ppm). Feedfoward compensation techniques at the LLRF are avoided since the reproducibility of HF ripple is very difficult to quantify in such high voltage, high power and fast power supply systems. Indeed, such ripple depends a lot on the topology itself, on the high voltage measurement noise and on the jitter introduced by the solid state switches and their driving electronics. The maximum energy that can be deposited in a klystron arc by the modulator is 10J, considering a typical arc voltage of 50V. This will allow for a safety margin with respect to the maximal energy specified by the klystron manufacturers (20J). Depending on the topology, some klystron modulators may generate a temporary reverse (positive) voltage on the klystron cathode at the end of the pulse (voltage swing due to demagnetisation of pulse transformers). The maximum repetitive reverse peak voltage shall not exceed 10% of the nominal pulse voltage amplitude (typical value allowed by klystron manufacturers is 20%). Table 2. Klystron modulator’s nominal parameters Pulse width (50% amplitude) 3.5 ms Flat-top duration 3.2 ms Rise/fall times (0..99% / 100..10%) <250 µs Droop or oscillations on flat-top (low <1 % freq.,< 1kHz) HF ripple at flat-top (> 1 kHz) <0.02 % Repetition rate 14 Hz Pulse voltage 115 kV Pulse current 21 A Pulse power 2.42 MW Average power 120 kW Efficiency >90% Maximum energy in case of arc 10J Maximum reverse cathode voltage 10% IV. SOLID STATE KLYSTRON MODULATOR TOPOLOGIES The powering strategy for the ESS LINAC klystrons was settled on the basis of two main principles: 1)klystrons are of the pulsed type (no mode anode terminal), therefore less expensive and more reliable; 2)only solid state pulsed modulators, with integrated arc protection capability excluding HV tube crowbars, were to be considered. The first four topologies reported herein were derived from a literature overview of the state of the art for long pulse applications. The last one (E) is a new proposal based on a modified version of the SNS klystron modulators’ topology [3]. A. Monolithic Pulse Transformer based The simplified schematic of the monolithic pulse transformer based topology [3] – Reass, W.A.; Doss, J.D.; Gribble, R.F.; “A 1 megawatt polyphase boost convertermodulator for klystron pulse application”, IEEE Conf. on Pulsed Power Plasma Science, 17-22 June 2001; [4][5][6] is presented in Figure 2. Figure 2. Monolithic Pulse Transformer based topology Principle A medium voltage capacitor bank is charged through a capacitor charger prior to the pulse forming. The output HV pulse is formed by switching on the HV solid state switch assembly which connects the capacitor bank to a pulse transformer (PT). The PT rises the voltage up-to the level required by the klystron and its secondary winding (output) is directly connected between the klystron cathode and body (ground potential). A passive LC resonant bouncer system compensates for the voltage droop, both due to the main capacitor bank discharge over time and to the PT internal voltage droop across the primary winding. A damping circuit is used to demagnetize the transformer at the end of each pulse, by dissipating the magnetization energy into a resistor. A non-linear voltage clamping system is usually required in order to guarantee that the maximum reverse voltage remains below a specified limit even in such cases where the main switch is open, following a klystron arc event. Advantages The power circuit is simple and reliable. All electronic active devices are at a medium-voltage level (transformer primary side) and placed inside an air insulated cabinet, therefore with easy access for maintenance and repair. Only the pulse transformer, the output voltage and current sensors (all passive devices) need to be placed inside an oil tank. In case of arc, the dI/dt is limited by the leakage inductance of the pulse transformer, which gives time enough to open the solid state switch (may be rather slow: ~10 µs total switch off-time) without excessive overcurrent and arc energy. Since the droop compensation system is based on a passive LC resonant circuit, high-frequency (HF) voltage ripple on the flat-top is inexistent (no HF switch mode power devices are used within the pulse forming loop). Hard points / limitations The design and construction of the pulse transformer B. Direct Switch At the end of the pulse, the HV direct switch is opened again and the charging process restarts. The same switch also stops the pulse in case of klystron arcing. To that purpose, a small inductance is connected in series which limits the dI/dt in case of arcing, therefore limiting the current increase during the switch-off delay time. A voltage droop compensation system (not shown) shall be accounted for. Such system could be based on the same LC resonant bouncer circuit as in the former topology or it could be based on a fast switch mode power supply (active bouncer) with closed loop feedback. DRIVER KLYSTRON HEAD DRIVER - KLYSTRON OIL TANK dI/dt LIMIT HV CABLE HV CABLE CAP. BANK & PULSER OIL TANK HV DIRECT SWITCH CAP. BANK CAP. CHARGER AIR INSULATED CABINET OIL TANK are complex tasks due to the simultaneous presence of the following three key factors,:- high voltage insulation (insulating materials, isolation distances); fast pulses (core materials, leakage inductances); The correct management of these aspects requires specific engineering expertise and a long record of practical experience. Manufacturing of such devices at an industrial scale is single source. The fully controllable HV solid state switch, being a master piece in the system (their reliability is a major concern particularly for arc protection), are difficult to find at an industrial level (association of several power semiconductors in series is still not a standard technique). Even so, at least 3 industrial companies specialised in the field and capable of producing such assemblies exist worldwide. As the pulse length and the average power requirements increase, the pulse transformers will become considerably or prohibitively bulky and expensive. Furthermore, rise/fall times will increase and may lead to a considerable impact on the global modulator + klystron efficiency. The LC resonant bouncer volume and cost (particularly those of the bouncer inductor) will become bulky and costly as the pulse length and average power increases, with still poor performance (open loop compensation system). Note that in an optimal design [5], the oscillation period of the bouncer shall be around 6 times higher than the pulse length (=60⁰; : compensation angle) and the bouncer peak current shall be twice the pulse current amplitude, taken at the primary side. Finally, the reverse voltage on the klystron to demagnetize the pulse transformer may be a strong limitation to the duty cycle increase. Indeed, for a complete reset of the core flux, the forward V.s value of a pulse shall be equal to the reverse V.s. As the forward V.s increases (either by increasing the pulse voltage amplitude or the pulse length or both) the reverse V.s has to increase identically. Hence, the reverse voltage, the reverse time or both will have to increase, but still the maximum reverse voltage is limited to 10% and the maximum reverse time is limited by the pulse repetition rate (off-time between pulses). An active bouncer system (fast switch mode power supply) could be an alternative that would avoid such constraints. KLYSTRON BODY + Figure 3. Direct Switch topology Advantages Since no pulse transformers are needed, very fast rise/fall times are possible. It is easily adaptable to a very large range of pulse lengths and pulse repetition rate requirements. No reverse voltage is generated on the klystron. The HF ripple depends solely on the droop compensation technique adopted (might be zero if a passive resonant bouncer is used, for instance). Since the majority of power parts are in oil, a compact solution can be obtained. Hard points / limitations All power components are in oil (longer time access for repair, large quantities of oil is required). The reliability in arc protection is dependent on the reliability of the HV direct switch. The effectiveness of the droop compensation system has still to be proven in large average power and repetition rate applications. High voltage (up-to ~100kV) IGBT assembly technology for these levels of power ratings is very specific at an industrial scale and single source. C. Marx generator The Direct switch topology is depicted in Figure 3 [7]. The schematic of the solid state Marx topology [8][9] is shown in Figure 4. Principle A capacitor bank is charged directly at the klystron voltage level by a HV capacitor charger power supply. To form the pulse, the HV capacitor bank is connected directly to the klystron by closing the HV solid state direct switch. Such switch is formed by a series connection of medium-voltage power semiconductor devices like IGBT’s. Principle A number of N capacitor banks are pre-charged in parallel from a single medium voltage capacitor charger (typically ~10 kV). During this state, all switches T1’..TN’ are closed and all switches T1..TN are open. In order to generate the HV pulse, switches T1’..TN’ are open and simultaneously switches T1..TN are closed. All capacitor banks are thus connected in series during the pulse forming period; therefore the output voltage is N x VC; (N: number of marx cells, VC: Voltage across each capacitor). Inductors for dI/dt limitation in case of arcing are added within each cell, in series with the discharging switches T1..TN. At each cell, DC/DC converters are used to power the driver electronics. These DC/DC converters are fed from small capacitors connected in the same way as the main capacitor banks (therefore forming a mini-marx generator) and following the same charge/discharge cycles [9]. A droop compensation system (not shown) may be either formed by a single fast DC/DC switch mode power supply (vernier regulator) located in series with cell #1 on the low potential side; or formed by N fast DC/DC regulators (PWM choppers) distributed within the power circuit, one located per cell. In the first case, a global regulation of the output voltage is performed whereas in the second case individual regulation of the voltage within each cell is obtained. Advanced modelling using Finite Element Analysis (FEA) and shielding techniques are required. The long term reliability of the solid state switches under such circumstances is still to be proven. In case of arcing, all discharging switches (T1..TN) shall open. If one fails and is kept closed, the amount of energy stored in the associated cell capacitor will be dissipated into the arc. Reliability in protecting the klystron in case of arcing is therefore divided by the number of cells, N. The active droop compensation system may generate significant HF ripple, well above a few hundreds ppm level. Furthermore, depending on the controls strategy implemented, the pattern of such ripple may be randomly variable (reproducibility concern), caused by asymmetries and bad synchronisation between the different PWM choppers (one existing per cell). D. Interleaved Multi–level Sub-converters A topology based on the association of several interleaved DC/DC sub-converters in series at a medium voltage level is shown in Figure 5 [10]. A pulse transformer is still required. Figure 4. Marx generator topology Advantages Since no pulse transformers are used, very fast rise/fall times are possible. A compact mechanical layout can be achieved, particularly if “field shaping elements” are used [9]; Since the design is oil free, no oil maintenance and security issues need to be accounted for. A very high efficiency (>95%) can be achieved. The topology and the mechanical layout are modular with easy access to components for repair. A full cell can be exchanged completely as a single rack. Redundant spare cells may be added to increase availability. The energy stored in the system is segmented in N independent capacitor banks. This will limit the damage in case of an internal or external (short-circuit) failures in a given capacitor bank, since its stored energy is divided by N with respect to the single capacitor bank solutions. Hard points / limitations Air insulation at voltage levels of 100kV and above, with such short insulation distances required for compactness of the system, constitute an additional engineering challenge and may have a strong impact on long term reliability, which will be affected by air and cleanness conditions inside the cabinets. Fast and intense electric fields constitute a major concern in the reliability of sensitive electronic components, particularly those used in the IGBT drivers. Figure 5. Multi-level topology based on the association of interleaved DC/DC sub-converters Principle A special 3-phase transformer, with multiple (N) secondary winding systems, feeds N isolated capacitor chargers. Each capacitor charger feeds one capacitor bank, which in turn supplies one DC/DC sub-converter, either of one quadrant (in black) or two quadrants (in black & red). The outputs of the N sub-converters are connected in series for voltage multiplication. Therefore, by using any technique of interleaved control (PSM or multi-level PWM) a variable DC voltage is obtained at the end of the series connected sub-converters, although with high HF harmonics. A common passive filter extracts such HF harmonics. The obtained filtered voltage is then applied to the primary winding of a pulse transformer which rises up the voltage till the value required by the klystron. Advantages Active demagnetisation of the pulse transformer is possible by using some two-quadrant DC/DC subconverters out of the total N (typically 10 to 15% would be enough), however requiring additional switchnig devices (in red in Figure 5). Active droop compensation is intrinsic to the topology, therefore requiring no additional sub-systems. The DC/DC sub-converters are regulated through PWM or PSM in closed loop feedback during the whole duration of the pulse, including the demagnetisation period at the end. Active klystron arc extinction is also possible by applying a controlled reverse (positive) voltage to the klystron whenever such an arc is detected. Partial modularity is obtained which will increase the availability. Automatic detection of module failures and subsequent reconfiguration are possible. All active power electronics (at primary side of the pulse transformer) is housed in air insulated cabinets, therefore with easy access for repair and diagnosis. Only the pulse transformer is within a HV oil tank. Hard points / limitations The HF voltage ripple at the pulse flat-top may be considerably high with respect to the 200 ppm limit, depending on the interleaving control technique adopted and on possible dissemetries existing between modules. Thermal cycling of semiconductors, operating under hard-switching conditions, may have an impact on their lifetime. To overcome this effect, either the semiconductor are oversized or the number of modules is increased. Two special transformers are required: the 3-phase multisecondary-winding & HV pulse transformer. All other inconveniences related to the usage of a pulse transformer (stated in point A) apply. E. Multi-level Resonant Sub-converters A new topology based on the association of several resonant sub-converters in parallel/series configuration, on a multi-level structure, is shown in Figure 6. Figure 6. Multi-level topology based on the association of multiple resonant DC/AC/DC sub-converters Principle A set of N H-bridges are fed from a common DC-link bus at medium voltage (~ 1 to 2kV). This DC-link bus is formed by several capacitor banks connected in parallel. Several capacitor chargers may be also connected in parallel on a one to one basis with respect to the capacitor banks. Although not mandatory on a functional point of view, this last principle will improve the modularity of the system. Each H-Bridge supplies a circuit formed by:- a LC parallel resonant circuit, a HF step-up transformer, a diode rectification bridge and an output HF filter. The outputs of the different circuits herein referred are connected in series; the total output voltage is therefore multiplied by N. The resonant circuits are excited by the H-bridges with a frequency above the resonance one. A voltage amplification factor of up-to 3 times, exclusively procured by the resonant circuits, is easily achievable in practice. The HF transformers can additionally multiply the voltage by a factor of 10. Typically, a number of 5 to 6 modules would be enough for a 100kV and above application. Soft switching techniques of the H-bridge IGBT’s should be implemented to reduce switching losses. They could be considerably high otherwise at switching frequencies typically in the order of 20kHz, with a consequent negative impact on thermal cycling fatigue of IGBT’s. Advantages All active power electronic components are located at the transformer primary side (medium voltage level). Like the topologies A and D, the majority of power electronics are installed in standard air insulated cabinets, whereas only the HF transformers, diodes and other passive devices are in an oil tank. This will facilitate access for repair and minimizes the quantity of oil required. Semiconductor switches and drivers are of standard commercial types. Several industrial sources exist worldwide. The HF transformers operate in AC mode which is the natural way of operation for such devices. On opposition to pulse transformers, no intrinsic limitations exist on their design with regards to the pulse length. No demagnetisation circuits are needed. The design and the construction of this type of transformers seem easier to carry on than pulse transformers. Like in D, the flat-top voltage (droop) is regulated in closed loop, by measuring the output voltage and by adjusting in consequence the H-bridge control signals dynamically, during the whole pulse duration. In case of klystron arcing, the resonant circuits will be “automatically De-Quewed” as their load resistance will be virtually zero. Therefore, even without disabling the H-bridge control signals, an intrinsic voltage shut-down with “self-current” limitation is obtained. The topology and the mechanical layout are entirely modular. Hard points / limitations The construction of the HF transformers is still a challenge:- mechanical stress due to pulsed operation; high frequency (20 kHz) design with high voltage insulation (100 kV and above at highest point); high average power (tens kW). Due to the poor power factor of the resonant circuits, the H-bridges shall handle a significant amount of reactive power and must be therefore oversized. Due to the existence of the intermediate resonant stages, which operate in AC mode and require an additional rectification and filtering stages, long rise times (typically in the order of 100µs) are obtained. Assuring “soft-switching” of the IGBT’s in all operating points might be complex, particularly during pulse “build-up” (low current). Reliable interlocking circuitry that detects and prevents missing soft switching conditions is mandatory. A HF ripple content on the flat-top is to be expected. Its real value depends not only on the theoretical design design and on the output filters, but mainly on practical aspects like control accuracy (jitter) of IGBT’s, symmetry on assembling and component tolerances between modules. The energy stored in the modulator circuit (HF transformer leakage inductances/leakage capacitances; output filter devices, etc.), which potentially can be dissipated into a klystron arc, may be significant and considerably higher than the maximum 10J allowed. Adding a special resistive dump circuitry in series with the output HV line might be necessary to overcome this drawback. A klystron modulator system rated for 100kV, 20A, 1ms/50Hz, composed by 5 modules according to Figure 6, was simulated using SABERDesigner software tool. The results are reported in Figure 7, Figure 8 and Figure 9. loop and the configuration of the output filters. Figure 8 shows the soft-switching conditions obtained (ZVS for the leading leg and ZCS for the lagging leg). Finally, Figure 9 shows the condition of a klystron arc simulation (short-circuit applied at the modulator’ output at instant t=0). No modifications have been implemented on the control loop nor on the H-bridge control signals during the time period shown. Although the converter is left running “normally” after the occurrence of such arc, the output current “is self-limited” to about 3 times the nominal value. This illustrates well the De-Qweing effect described above. Figure 8 – Internal waveforms of one resonant circuit module. Note: ZVS on leading leg (with parallel capacitors across IGBT’s); ZCS on lagging leg. a)- voltage (VH) and current (ILR)at the output of one Hbridge, VCR: voltage across the resonant capacitor; b)- Voltage (VQ1) and current (IQ1) of the same H-bridge’s top/leading leg IGBT; c)- Voltage (VQ2) and current (IQ2) of the same Hbridge’s bottom/lagging leg IGBT. Figure 7 – Output voltage pulse shape of a multi-level resonant klystron modulator. The rise-time obtained was in the order of 170µs. Overshoot and voltage droop are less than 1%. The HF ripple obtained (ideal control of IGBT’s; no unbalances between modules) was in the order of 800ppm (a factor of 4 higher than the specified limit). The reduction of the HF ripple under 100ppm and of the rise time down-to 100µs (0..99%) was recently obtained by modifying the control Figure 9 – Klystron arc simulation: VLF: Sum of all voltages across the output filter inductances; ILF: Klystron arc current. V. CONCLUSIONS Five klystron modulator topologies based on solid state power electronics and covering the current state of the art in the field were presented and discussed comparatively, on the context of the ESS project. The main particularities of such modulators reside on the long pulses required (3.5 ms), considerable average power (120 kW), compactness and high reliability. Although the resonant multi-level topology seems interesting in terms of accessibility, reliability, modularity, adoption of standard and multi-source components, self-limitation of arc current, its practical implementation and validation requires a considerable amount of effort and time and could hardly be an option. The Marx generator topology is compact, oil free and modular. However, due to the large amount of semiconductors present at HV potential and submitted to fast pulsed electric fields, its long term reliability and cost effectiveness is still to be proven on an industrial scale. All other topologies mentioned in this paper exist on an industrial scale and have been used in other similar applications. However, their functional characteristics (rise/fall times; HF voltage ripple; reverse voltage on the klystron) and their ease of operation (accessibility; expected reliability; oil quantity required) differ considerably between them. Considering the significant amount of klystron modulators required (~200 units), costs, accessibility (Mean Time to Repair) and reliability (Mean Time Between Failures) are key parameters that shall be quantified or at least evaluated deeply. For instance, if the MTBF is 50.000 hours per unit (1 failure in every 5.7 years of continuous operation), and the MTTR is 2 hours, we obtain a global Machine Availability of 99.2% due only to klystron modulators. The construction, testing and evaluation of prototypes, before series production, are therefore mandatory intermediate steps, which are required to assess the compliance of the whole infrastructure with such challenging operation parameters. VI. REFERENCES [1] – Mezei, F.; Tindemans, P.; Bongardt, K.; “The 5MW LP ESS best price-performance”, February 2008; [2] – Eshraqi, M.; et Al.; “Conceptual Design of the ESS Linac”, Proc. of International Particle Accelerators Conference, IPAC’2010, 23-28 May 2010, Kyoto, Japan; [3] – Reass, W.A.; Doss, J.D.; Gribble, R.F.; “A 1 megawatt polyphase boost converter-modulator for klystron pulse application”, IEEE Conf. on Pulsed Power Plasma Science, 17-22 June 2001; [4] – Pfeffer, H. et al.; “A Long Pulse Modulator For Reduced Size And Cost”, 21st Int. Power Modulator Symposium, 27-30 June 1994; [5] – Martins, C.A.; Bordry, F.; Simonet, G.; "A Solid State 100kV Long Pulse Generator for Klystrons Power Supply", 13th European Conference on Power Electronics and Applications, EPE '09, 8-10 Sept. 2009; [6] – Wagner, R. et al.; “The Bouncer Modulators at DESY”, IET European Pulsed Power Conference, CERN, Geneva, 21-25 Sept. 2009; [7] – Kempkes, M.; et al.; “A klystron power system for the ISIS front end test stand”, IEEE Pulsed Power Conference, PPC '09, June 28 -July 2 2009; [8] – Leyh, G.E.; “The ILC Marx Modulator Development Program at SLAC”, IEEE Pulsed Power Conference, PPC ’05, 13-17 June 2005; [9] – Burkhart, C.; et al.; “ILC Marx modulator development program status”, IEEE Pulsed Power Conference, PPC '09, June 28 -July 2 2009; [10]- Alex, J.; et al.; “A New Prototype Modulator for the European XFEL Project in Pulse Step Modulator Technology”, Proc. of Int. Particle Accelerators Conference, PAC ’09, 4-8 May 2009, Vancouver, Canada;