Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
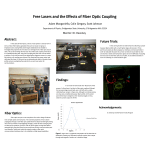
Technologies for Neuroimaging Department of Electrical and Computer Engineering Undergrad Team: Aaron Rosenfeld, Shawn Nagar, Anshul Panwar, Abylaikhan Alip, Ruslan Nurimbetov Professor: Thomas Talavage GENERAL GOAL ORIGINAL CONTROLLER DESIGN The mechanical design was altered to better suit 3D printing capabilities and requirements. The fiber optic transceiver was rebuilt, tested, and revised with updated schematics. The Tiva (microcontroller) was programmed to represent the receiver’s output voltage as numerical data accessible by the host device. Functional Magnetic Resonance Imaging (fMRI) is a way of measuring localized brain activity. It requires the subject to remain still while often interacting with an external stimulus. One effective way to stimulate higher cognitive function is using video games. However due to the high magnetic field present during testing, there cannot be any metallic objects close to the subject. A typical controller is not a viable way for a subject to play games during the fMRI. A completely nonmetallic controller is desired to help stimulate the brain for complex sensorimotor investigation. A plastic and fiber optic controller is being developed to meet these requirements. FUTURE WORK A custom 3D printed model with better ergonomics needs to be designed. An opto-mechanical interface must be integrated into the joystick design to relate light attenuation to axis position. The transceiver circuit design should be optimized for a single voltage rail. The microcontroller should be configured as a USB PID (physical interface device) by the host device. PREVIOUS WORK The prototype was based on a button based user input system which consisted of custom made optical sensors and microcontroller design. The prototype had some major issues: • Extended usage led to misalignment and incorrect button presses • Not easily reproducible • Obsolete components • Bulky The emergence of 3D printing has expanded options for mechanical designs. Previous teams have updated circuit schematics, modified mechanical designs, and mapped the relationship between optical attenuation and analog receiver voltage. CURRENT WORK COMPONENTS PROTOTYPE DESIGNS Sensors and Controller • TI Tiva TM4C123G LaunchPad • Digital Fiber optic Receivers (AFBR-2624Z ) • Analog Fiber optic Receivers (SFH250V) • Fiber optic transmitters (AFBR-1624X) • 1mm fiber optic cable Controller Case • External shell • Base mount (Left)The original joystick design relied on earlier plastic manufacturing processes, requiring pieces to be designed in halves and cast in break-out molding. (Right) The resulting assembly has poor mechanical stability, and requires precision beyond the capabilities of consumer-grade 3D printers; axis holes must be machined after printing. Revised mechanical design gimbal (Top) and housing (Bottom) present a more mechanically stable design, and have greater tolerance for hole placement in 3D printing.