Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Factorization of polynomials over finite fields wikipedia , lookup
Brander–Spencer model wikipedia , lookup
Corecursion wikipedia , lookup
Genetic algorithm wikipedia , lookup
Knapsack problem wikipedia , lookup
Drift plus penalty wikipedia , lookup
Multiple-criteria decision analysis wikipedia , lookup
Expectation–maximization algorithm wikipedia , lookup
Travelling salesman problem wikipedia , lookup
Simplex algorithm wikipedia , lookup
Multi-objective optimization wikipedia , lookup
Joint Stocking and Sourcing Policies for a Single–Depot,
Single–Base, Two–Echelon Environments with Repairable
Parts: The Role of Flexibility
Izack Cohen, The Technion
Morris A. Cohen, The Wharton School
December 16, 2013
This research was partially supported by the Fishman-Davidson Center for
Service and Operations Management
1
Joint Stocking and Sourcing Policies for Single-Depot, Single-Base, Two-Echelon Environments
with Repairable Parts: The Role of Flexibility
Abstract
New system designs and maintenance technologies typically increase maintenance sourcing flexibility
by efficient fault identification and repair procedures. This paper examines the impact of such flexibility
in the context of single-depot, single-base, two-echelon repairable parts inventory systems. The
research results demonstrate that simultaneous optimization of strategic repair allocations and inventory
stocking decisions can improve overall supply chain performance. We develop structural results to
characterize the optimal joint stocking/sourcing policy and construct a heuristic solution algorithm. An
analysis identifies three types of flexible repair sourcing policies which can be selected for a part, based
on its cost and lead time attributes: central, where all repairs are sourced from a central depot, local,
where all failures are repaired at the base, and a mixed repair policy, where a fraction of the parts is
repaired at the base and the remainder is repaired at the depot. Analysis of an extended test case based
on real world data illustrated that a service goal for fleet availability can be met with a lower investment
in inventory and reduced repair costs, when compared to the typical situation where repair allocation
decisions are treated as an exogenous input to the stock control system. The algorithm introduced in
this paper can be incorporated easily into existing commercial software packages and thus our results
have the potential to be widely implemented.
2
1. Introduction
The environment for managing service support supply chains for the maintenance and repair of
complex, mission critical products has changed considerably in recent years. In particular, traditional
multi-echelon maintenance practice, where simple maintenance and failure repairs are performed at
forward locations (hereafter known as forward bases) and more complex repairs are carried out at a
central depot. This has now changed to one where managers at all locations are encouraged to adopt
flexible repair sourcing policies in order to reduce the cost of maintenance and support. This trend has
been enabled by the development of new systems and technologies that have led to an overlap of many
existing in-base repair capabilities with those present at higher echelon (depot) locations. In such cases,
the managers of forward bases can choose between outsourced (depot) and in-base repair for many
parts. Indeed, capabilities for conducting repairs have become more available throughout the service
support network due to technology changes that have led to decreases in repair tooling costs and higher
use of modular product designs. In addition, as noted in Muller et al. (2008), the introduction of remote
diagnostic technology and real-time, full visibility data-systems, supports more flexible responses to
maintenance events. Outsourcing of support functions has also been encouraged by the adoption of
Performance Based Logistics contracting, especially in the aerospace and defense industry (Sang-Hyun
et al., 2007). Such outsourcing can be viewed as part of a longstanding movement to rationalize the
structure of maintenance networks by reducing the use of intermediate echelon repair sites and by
exploiting flexible repair capabilities throughout the network. These trends are especially prevalent in
the defense industry, where, as noted in a recent U.S. Department of Defense Depot strategic
maintenance plan, “Depot maintenance is increasingly becoming a capability that is not necessarily
limited to specific locations” (page 6, Part I of the Depot maintenance strategic plan, 2007).
In this paper, we offer managerial insights that are based on an analysis of the problem from a strategic
perspective. Specifically, we consider the tradeoff between repair allocation (i.e. sourcing) and
repairable parts inventory investment. We provide a framework to deal with questions such as: Should
a service provider repair all parts at the cheapest and fastest repair location; what should be done when
the faster repair location is also more expensive, and how will repair sourcing decisions affect the cost
of inventory required to maintain service standards based on system up-time and availability?
3
Our focus is on a one-base one-depot problem for three main reasons: 1) such environments are realistic
in many cases as we discuss below; 2) it allows us to develop structural results and managerial insights,
which are more difficult to generate in multiple-base environments and, 3) our analysis of the one-base
one-depot model establishes the foundation for an efficient heuristic solution that can be extended to
multi-location scenarios.
Many organizations prefer to support a fleet of systems from a single forward location when, for
example, the fleet is small enough and its missions are sufficiently geographically concentrated so that
they can be performed efficiently from a single location. Several European air forces, for example,
operate aircraft fleets from a single base and maintain a depot at a different location. Another example
is the stocking system used by the US Navy to stock parts on aircraft carriers that go on duty at remote
stations for extended periods of time. In this system, parts are stocked at the forward base (the carrier)
according to an Aviation Consolidated Allowance List (AVCAL), while additional parts are stocked at
the depot under the Shore Consolidated Allowance List (SHORCAL). This is effectively a one-base,
one-depot system. We can also see such two location networks when strategically important systems
operate from a single location, as was the case with the F117 stealth aircraft. Thus, our analysis is
relevant for those organizations that operate fleets of systems from a single forward location and repair
failed parts at a different location (e.g., at a central depot that historically carries out all major repairs).
Typically, such organizations choose between in-house repair either at the base or at the depot and
outsourcing of repairs to a contractor (e.g., to the Original Equipment Manufacturer). Multi-echelon
multi-indenture (MIME) models, which are used extensively to manage service support supply chains,
take, as an input, the fraction of repairs performed at each location for each part supported by the system.
This was a reasonable assumption when the Metric model was originally developed and implemented
(Feeney and Sherbrooke, 1966; Sherbrooke, 1968). In today's environment, where outsourcing of
aftersales has become more common and technology has expanded failure identification and repair
capabilities, the importance of updating repair allocation policies periodically, on the basis of total cost
tradeoffs and in response to changes in support requirements, is considerable. Thus, use of fixed
fractions over a long-term program life cycle will be sub-optimal.
4
The paper is organized as follows: In the next section we review the relevant literature. In Section 3
we present a formulation of a two-echelon, two-location, multiple-item (parts) model and develop
structural results that are used in constructing a solution algorithm. These results are based on our
derivation of closed-form specifications of the key drivers of performance. Section 4 contains an
analysis of the optimal joint stocking/sourcing policy and provides managerial insights. A heuristic
solution algorithm based on these results is then constructed in Section 5. Section 6 describes the results
of applying the algorithm to a number of test case problems. The final section concludes the paper and
suggests directions for further research.
2. Literature Review
Our analysis builds on two streams of research literature, i.e. MIME and Level of Repair Analysis
(LORA). In this section we briefly review the relevant literature from both streams and focus on the
few examples that have combined both.
The goal of multi-echelon inventory models is to satisfy a given service target through efficient
inventory allocation throughout the supply chain network. The fundamental model for repairable
inventory management was introduced in the landmark papers by Feeney and Sherbrooke (1966) and
Sherbrooke (1968). Subsequently MIME models have been extended to include multi-indenture
problems (Muckstadt, 1973), lateral transshipments (Lee, 1987), cannibalization (Sherbrooke, 2004;
Gaver et al., 1993), non-backordering and emergency shipments (Cohen et al., 1988) and location
dependent lead times (Wang et al., 2000). We refer the readers to Sherbrooke (2004) and Muckstadt
(2005) for extensive literature reviews. The resulting optimization problem is non-linear, stochastic and
discrete and moreover can be of an enormous size in application settings characterized by many
thousands of part-location combinations and multiple product and customer classes. Accordingly there
has been on-going research to develop computationally efficient solution methods (e.g. Nowicki et al.,
2012). The literature on finite capacity MIME models is extensive. Diaz and Fu (1997), Perlman et al.
(2001) and Sleptchenko et al. (2002) take finite repair capacity as a given input parameter and use finite
capacity queuing model approximations. Zijm and Avsar (2003) introduced a stochastic model that
deals explicitly with two-indenture multi-component systems with a single component repair facility.
A number of papers introduce models with multiple repair sites, given repair capacities and fixed repair
5
allocation fractions (Sleptchenko et al., 2005; Kim et al., 2007). Sleptchenko et al. (2003) extends the
standard MIME algorithm by using results from his earlier finite capacity multi-class queuing model to
develop a variant of the greedy algorithm for computing optimal capacity and inventory levels in a
general multi-echelon, multi-indenture setting. Lau and Song (2008) developed extensions of this
approach for the case of non-stationary demands.
Traditional LORA models have been used to design a minimum cost maintenance infrastructure, taking
into account fixed investment and variable repair costs. The standard assumption is that a part is
repaired at a single source location (e.g., parts from a forward location are repaired either at that location
or at a central depot—see Saranga and Kumar, p. 100). LORA research efforts have concentrated on
defining appropriate problem formulations and on developing effective heuristic solutions for solving
the resulting optimization problem such as determining repair locations (Barros and Riley, 2001;
Saranga and Kumar, 2006; Basten et al., 2009).
The joint consideration of repair capacities, inventory investments and repair sourcing has been
considered in only a small number of papers that are directly related to our research. Alfredsson (1995)
used an IP formulation to determine the deployment of resources needed to support repair of the parts
through specification of stocking targets and repair allocations for each part-location combination.
Rappold and Van Roo (2009) considered the problem of supply chain design for a single-item, singleindenture system. They used a stochastic integer program to model the joint repair facility location and
inventory allocation problem. In a series of models, Basten et al. (2011a, 2011b) introduced a more
general IP model of the LORA problem and solved the joint inventory-allocation problem through its
decomposition and by iterative methods.
There are a number of simulation models that have considered routing priorities for repairable items in
a multi-echelon setting (Hausman and Scudder, 1982; Pyke, 1990). Slepthchenko et al. (2005) used an
algorithm, based on a priority queuing model that considers the stocking/sourcing priority decisions
jointly in a finite repair capacity situation where high priority jobs interrupt low priority jobs. Their
model, however, does not consider repair cost differences and assumes static job priorities and fixed
allocation/sourcing. Their results are based on numerical experiments and indicate that the prioritization
of jobs is relevant only when capacity utilization is high. Finally we note the paper by Caggiano et al.
6
(2006) which develops a real time model for making dynamic repair and inventory allocation decisions
in a multi-echelon network.
Our model differs from the existing literature in two fundamental ways; 1) it deals with a situation in
which the repair capability and capacity already exist and are overlapping at several locations 2) we
explicitly consider meeting the service goal at a minimum total (inventory plus repair) cost through
simultaneous adjustment of repair sourcing and inventory stocking decisions. In particular we focus on
the setting of strategic targets for both inventory and sourcing levels and thus establish the setting of a
joint stocking/sourcing policy which can be dynamically adjusted throughout a program’s life cycle.
Note that previous papers that have dealt with the joint problem only present results based on numerical
analysis of examples that can be computationally intensive and limited managerial insight. We develop
a number of new analytical results for the joint problem which provide insights into the structure of an
optimal inventory/repair sourcing strategy. These results are then used to modify the standard marginal
analysis (“greedy”) heuristic algorithm that is used widely today in solving real-world, large-scale
multi-echelon inventory problems, in order to account for joint stocking/allocation decisions. We note,
in particular, that the analytical results developed in this paper extend the literature on exact
formulations for computing backorders for the multi-echelon, repairable inventory problem. Our results
include closed-form functions for expected backorders and their derivatives with respect to both
allocation and stocking decisions, which to our knowledge have not appeared in the literature.
Beginning with Simon (1971) and extended by Graves (1985), Axsater (1990) and, Rustenburg et al.
(2003), prior exact solutions led to numerical approaches for computing the backorder probability
distribution from which performance metrics, such as expected backorders, was computed. Our closedform results enable the development of derivatives and structural results which support the development
of the extended algorithm for solving the joint problem which is presented in our paper. The closedform results also support the development of structural results which characterize the nature of optimal
repair sourcing policies based on the tradeoff associated with the use of flexible repair capacity and part
inventory investment to meet availability-based service goals at the least cost. In doing so, we have
been able to develop managerial insights concerning a stocking and repair sourcing policy that can lead
to more effective utilization of service support resources.
7
3. The Model
In this section we introduce a model, which captures the tradeoff between cost and response time in a
multi-echelon environment. We first discuss the model’s assumptions and its dynamics. Then, in
Subsection 3.2, we introduce notation, formulate the model and introduce several structural results
pertaining to optimal inventory and sourcing policy.
3.1 The model's environment, assumptions and dynamics
We model a two-echelon system consisting of a single operating location and a single central depot.
We assume that inventory is managed at the sub-system or Line Replaceable Unit (LRU)) level. N
systems (end products) are supported by the base and each system consists of K LRUs (hereafter
referred to as parts). In general a system becomes non-operational (“down”) if any LRU fails. The
base must satisfy a predetermined service level for availability which defines a minimal number of
operationally ready systems. The objective is to minimize cost for a single review period. We consider
repair related costs and inventory purchase costs. We assume that the initial investment to set up the
repair capability (e.g., for the purchase of equipment, training and construction of the infrastructure)
has been made, and both the base and the depot have partially overlapping repair capabilities. Thus the
maintenance manager can control repair sourcing by changing the allocation of repairs between the
locations (e.g., by increasing or decreasing the fraction of repairs that is outsourced from the base to the
depot).
We make the standard repairable inventory model assumptions: Poisson demand, backordering of
excess demand at each stocking location, target (order-up-to) stocking policy at each location and ample
repair capacity. The joint optimization is executed once per period and we consider a steady-state,
continuous review model that is similar to the Metric model, but where also the repair allocation
fractions are optimized.
We assume that performance is only impacted by adjusting the stocking and sourcing decision variables.
There are, of course, other ways to modify overall performance, i.e. by changing parameters defining
repair lead times, repair costs and part failure rates, etc. We treat these parameters as given data since
making changes to them would require a significant investment, could take a long time to implement
and typically are not subject to the authority of the service supply chain manager. Therefore, we
8
consider three decisions to be made for each LRU j within the period; i.e. the TSLs (Target Stocking
Levels) at the depot (𝑆0𝑗 ) and at the base (𝑆1𝑗 ), and the fraction of repairs to be carried out at the base
repair facility (𝑟1𝑗 ). We assume that 𝑟1𝑗 + 𝑟0𝑗 = 1, which is the case if all parts are repaired either at
the base or at the depot and none are condemned (alternatively, condemned parts are immediately
replaced by good parts).
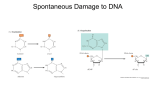
Figure 1 illustrates material flows for the basic model two-echelon repairable parts logistics system.
𝑟0𝑗
Operations
𝑟1𝑗
Base
Depot
Warehouse
Repair facility
Failed part
Good parts
Figure 1: Repairable Material Flows
The sequence of events in the period is as follows:
1. A part fails randomly generating a demand at the base for a good unit.
2. If available, the base replaces the failed part with a good part from its good inventory; otherwise
the demand is backordered at the base.
3. With probability 𝑟1𝑗 , the base sources the repair of the failed part to its local repair site and with
probability 𝑟0𝑗 the repair is sourced to the depot repair facility.
4. The depot observes a replenishment demand for a good unit for each unit it receives for repair
and if available ships the good unit to the base and sends the failed unit to its repair facility. If
not available, the demand is backordered at the depot.
5. The lead times for units repaired at the base and at the depot are constant.
9
6. The “effective” lead time for units repaired at the depot includes the depot repair cycle time,
inbound and outbound ship times and any delay time caused by a stockout at the depot (of its
good inventory).
A repair may take place at a location, only if the necessary resources (e.g., gigs, test equipment, trained
people) are available. We assume that each location has a maximum repair capability 𝑟̅𝑖𝑗 which is
determined by the existing capabilities for repair and the underlying distribution of repair complexity
requirements. For example, it may be that for some parts there is no capability for local repair (in which
case 𝑟̅1𝑗 = 0); for some, 𝑟̅1𝑗 = 1 which means that all repairs could be done locally and for others,
repairs can take place at both the depot and the base, e.g. 𝑟̅1𝑗 = 0.5. Effectively we assume that 𝑟̅𝑖𝑗 =
1, for i = 0 and 1, i.e. each location has full repair capability, leading to complete overlapping for
maximum flexibility. Nevertheless our model and approach can be applied for any overlap fraction in
repair capability. Note that both the lead time and unit repair cost can vary by repair location. The key
issue that we examine in this paper is how the decisions of setting TSLs for each location and decisions
for setting target levels for sourcing fractions, which determine the utilization of location specific repair
capabilities, interact in determining both total cost and system availability. This potential tradeoff is
ignored when the target stocking decisions and repair capability utilization decisions are analyzed
separately.
3.2 Model formulation and structural results
We use the following notation throughout the paper: i identifies a location (0 for depot, 1 for base), j
denotes the LRU, 𝜆 is the average number of repair demands per period where each repair out of the
fraction 𝑟𝑖𝑗 that is repaired at a location 𝑖 for LRU j is characterized by cost 𝑐𝑖𝑗 and lead time 𝐿𝑖𝑗 . 𝑇𝑇
is the transport time from depot to operating location (common to all LRUs). The unit purchase cost of
a part is 𝑝𝑗 . There are 𝑁 systems being supported and the overall availability goal is 𝐴. 𝑆𝑖𝑗 is the target
stocking level and, 𝑅𝑖𝑗 and 𝐵𝑂𝑖𝑗 are the number of units in the repair pipeline and the expected number
of backorders, respectively.
The problem we address is to minimize the sum of repair related costs and the cost to stock parts in
inventory, subject to a service constraint based on achieving a minimal level of fleet availability.
11
First consider the cost objective for this problem. Item j can be repaired at either the base repair facility
(i=1) or at the central depot (i =0) and the total repair cost per period is 𝜆𝑗 ∗ (𝑟1𝑗 ∗ 𝑐1𝑗 + 𝑟0𝑗 ∗ 𝑐0𝑗 ). We
have assumed that fixed costs are absorbed and included in the repair costs and we do not consider the
possibility of economies of scale or finite capacity at repair facilities.
The stocking cost is equal to the number of spare parts purchased multiplied by the unit purchase cost.
We assume that initial inventory is zero and thus, we ignore holding costs and formulate the inventory
related costs simply as (𝑆1𝑗 + 𝑆0𝑗 ) ∗ 𝑝𝑗 , i.e. the purchase cost of stocking up to the TSL levels.
Nonetheless, the model is general enough to incorporate any initial inventory level.
The total cost for LRU j is equal to 𝜆𝑗 ∗ (𝑟1𝑗 ∗ 𝑐1𝑗 + 𝑟0𝑗 ∗ 𝑐0𝑗 ) + (𝑆1𝑗 + 𝑆0𝑗 ) ∗ 𝑝𝑗 and minimizing it is
𝑐
equivalent to minimizing 𝜆𝑗 ∗ ( 𝑝0𝑗 +
𝑗
𝑐
∑𝐾𝑗=1{𝜆𝑗 ∗ ( 0,𝑗 +
𝑝𝑗
𝑟1𝑗 ∗(𝑐1𝑗 −𝑐0𝑗 )
) + (𝑆1𝑗 + 𝑆0𝑗 ). The objective is to minimize
𝑝𝑗
𝑟1,𝑗 ∗(𝑐1𝑗 −𝑐0𝑗 )
𝑝𝑗
) + (𝑆1𝑗 + 𝑆0𝑗 ). Note that if there was no availability constraint we would
prefer to repair all parts at the cheaper repair location. Finally, for any given set of repair fractions
𝑟1𝑗 , 𝑟0𝑗 , if 𝑐1𝑗 = 𝑐0𝑗 , our problem reduces to the standard repairable multi-echelon model (e.g.,
Sherbrooke, 2004) where the goal is to find, for every location i, and LRU j the TSL, 𝑆𝑖𝑗 to meet the
availability goal with minimal inventory cost. In this case, the cost of repairs would be fixed and the
repair fractions will affect the optimal stocking solution through their impact on demand and lead times
at each location.
We consider a system available if all of its LRUs are in working order and we assume that each LRU
appears once in the system's Bill of Materials (this assumption can be easily relaxed). We also make
the standard assumption of independent failures across the system (e.g. aircraft). The overall fleet
availability should be larger than the availability goal 𝐴, which is equal to the fraction of systems that
are ready for use at the bases, on any given day. This leads to the following service constraint
∏𝐾
𝑗=1(1 − 𝐵𝑂1,𝑗 (𝑆0,𝑗 , 𝑆1,𝑗 , 𝑟1,𝑗 )⁄𝑁 ) ≥ 𝐴 (e.g., Sherbrooke, 2004).
In the remainder of this section we restrict attention to the special case of one LRU in order to develop
key structural results. Accordingly we drop subscript j and re-introduce it where appropriate as we
11
extend our results to the multi-LRU case. For the one LRU case, the actual availability is 1 − 𝐵𝑂1 ⁄𝑁
and thus the availability constraint can be written as 𝐵𝑂1 ≤ 𝑁 ∗ (1 − 𝐴) (e.g. Sherbrooke, 2004, p. 39).
We now introduce several structural results which are used in the construction of a heuristic algorithm
for generating the optimal solution to the problem. We begin by developing closed-form expressions
for expected backorders, which drive the availability constraint. As the mathematics involved is rather
tedious, we have placed most of it in the appendices of the Supplement and we present here only the
final results. In the next section we use these results in conjunction with repair and purchase costs to
characterize stocking /repair sourcing policies and consider their implications for managing repairs and
inventory in a cost effective and flexible manner. In subsequent sections we use these results to develop
a heuristic solution algorithm for the case of multiple LRUs. The performance of this algorithm is then
demonstrated in the context of a numerical example drawn from a real-world problem.
Proposition 1
For any stocking solution (𝑆1 , 𝑆0 ) and base sourcing fraction, 𝑟1 , the expected number of backorders
at the depot is,
𝑆0 −1
𝐵𝑂0 (𝑆0 , 𝑟1 ) = 𝜆 ∗ (1 − 𝑟1 ) ∗ 𝐿0 − 𝑆0 + 𝑒
−𝜆∗(1−𝑟1 )∗𝐿0
∑
𝑛=0
(𝜆 ∗ (1 − 𝑟1 ) ∗ 𝐿0 )𝑛
∗ (𝑆0 − 𝑛)
𝑛!
(see Appendix A, for the proof).
Using this formula for 𝐵𝑂0 (𝑆0 ) we can derive a closed-form expression for backorders at the base,
𝐵𝑂1 (𝑆0 , 𝑆1 , 𝑟1 ).
Proposition 2
For any stocking solution (𝑆1 , 𝑆0 ) and base sourcing fraction, 𝑟1 , the expected number of backorders
at the base is,
𝑆1 −1
𝐵𝑂1 (𝑆0 , 𝑆1 , 𝑟1 ) = 𝐷 + 𝑒
−𝐷
∗∑
𝑘=0
𝐷𝑘
∗ (𝑆1 − 𝑘) − 𝑆1
𝑘!
where,
𝑆 −1 (𝜆∗(1−𝑟1 )∗𝐿0 )𝑛
𝑛!
0
𝐷 = 𝜆 ∗ 𝑟1 ∗ 𝐿1 + 𝜆 ∗ (1 − 𝑟1 ) ∗ 𝑇𝑇 + 𝜆 ∗ (1 − 𝑟1 ) ∗ 𝐿0 − 𝑆0 + 𝑒 −𝜆∗(1−𝑟1)∗𝐿0 ∑𝑛=0
(see Appendix A for the proof.)
12
∗ (𝑆0 − 𝑛).
With these results we formulate the optimization problem for a single LRU as:
𝑐
𝑟1 ∗(𝑐1 −𝑐0 )
𝑝
𝑝
min𝑆0 ,𝑆1,𝑟1 𝜆 ∗ ( 0 +
) + (𝑆1 + 𝑆0 )
(P1)
subject to:
𝐵𝑂1 (𝑆0 , 𝑆1 , 𝑟1 ) ≤ 𝑁(1 − 𝐴) ,
0 ≤ 𝑟1 ≤ 1 and 𝑆1 , 𝑆0 ≥ 0 and integer.
The multiple LRU problem formulation is a generalization of (P1):
𝑐0𝑗
min𝑆0𝑗 ,𝑆1𝑗,𝑟1𝑗 ∑𝐾
𝑗=1{𝜆𝑗 ∗ (
𝑝𝑗
+
𝑟1𝑗∗(𝑐1𝑗 −𝑐0𝑗 )
𝑝𝑗
) + (𝑆1𝑗 + 𝑆0𝑗 )}
(P2)
subject to:
𝐾
∏(1 − 𝐵𝑂1𝑗 (𝑆0𝑗 , 𝑆1𝑗 , 𝑟1𝑗 )⁄𝑁 ) ≥ 𝐴
𝑗=1
𝑟1𝑗 ≤ 1 and 𝑆1𝑗 , 𝑆0𝑗 ≥ 0 and integer for all j.
There are several properties of (P2) that allow us to develop a marginal analysis procedure for its
solution. First, we notice that the objective function is separable with respect to the LRUs. Specifically,
the value of the first derivative of the objective function with respect to each of the decision variables
for LRU j, {𝑆0𝑗 , 𝑆1𝑗 , 𝑟1𝑗 } is 0 for all the LRUs other than j.
Let us look at the availability constraint. We take a logarithm of the LH side of the availability
constraint and get:
𝐾
𝐾
𝑙𝑜𝑔 [∏(1 − 𝐵𝑂1𝑗 (𝑆0𝑗 , 𝑆1𝑗 , 𝑟1𝑗 )⁄𝑁)] = ∑ 𝑙𝑜𝑔(1 − 𝐵𝑂1𝑗 (𝑆0𝑗 , 𝑆1𝑗 , 𝑟1𝑗 )⁄𝑁)
𝑗=1
𝑗=1
Using a power series expansion for 𝑙𝑜𝑔(1 − 𝑥) = − ∑∞
𝑙=1
𝑥𝑙
𝑙
for −1 ≤ 𝑥 ≤ 1 and noting that for the
relevant cases, 𝐵𝑂1𝑗 (𝑆0𝑗 , 𝑆1𝑗 , 𝑟1𝑗 )⁄𝑁 ≪ 1, we approximate 𝑙𝑜𝑔(1 − 𝑥) ≅ −𝑥 (e.g., to achieve 97%
availability for a single LRU −𝑥 = −0.03 and 𝑙𝑜𝑔(1 − 𝑥) = −0.03046). As the number of LRUs
increase, the 𝑥 values required to achieve a given level of availability will be much lower and the
approximation will be even better.
1
So, 𝑙𝑜𝑔[∏𝐾𝑗=1(1 − 𝐵𝑂1,𝑗 (𝑆0,𝑗 , 𝑆1,𝑗 , 𝑟1,𝑗 )⁄𝑁)] ≅ − 𝑁 ∗ ∑𝐾𝑗=1 𝐵𝑂1,𝑗 (𝑆0,𝑗 , 𝑆1,𝑗 , 𝑟1,𝑗 ). The logarithm of the actual
availability is thus represented as an additive separable convex function of the LRU’s backorders. The
13
parameter that maximizes a function also maximizes its logarithm, so to maximize availability we need
to minimize the sum of backorders for all LRUs. Finally, we decompose the problem into K problems,
one for each LRU, where there is an additional overall constraint to meet the overall availability.
After some mathematical development and rearrangement we formulate each of the K sub-problems as:
min𝑆0𝑗 ,𝑆1𝑗,𝑟1𝑗 𝜆𝑗 ∗ (
𝑐0𝑗
𝑝𝑗
+
𝑟1𝑗∗(𝑐1𝑗 −𝑐0𝑗 )
𝑝𝑗
) + (𝑆1𝑗 + 𝑆0𝑗 )
(P3)
subject to:
𝐵𝑂1𝑗 (𝑆0𝑗 , 𝑆1𝑗 , 𝑟1𝑗 ) ≤ −𝑁 ∗ 𝑙𝑜𝑔𝐴 − ∑𝑙={(1,..𝐾)∖𝑗} 𝐵𝑂1𝑙 (𝑆0𝑙 , 𝑆1𝑙 , 𝑟1𝑙 )
𝑟1𝑗 ≤ 1 and 𝑆1𝑗 , 𝑆0𝑗 ≥ 0 and integer.
We have represented the multiple LRU problem as a series of single LRU problems, each identical to
(P1) apart from the modified availability goal which captures the relative contribution of each LRU to
overall system availability.
This constrained optimization is non-linear and includes both continuous and discrete decision
variables. In general, the multi-echelon stocking sub-problem, to determine 𝑆1 , 𝑆0 , is not jointly convex
and thus finding a solution to the overall problem must be based on a heuristic algorithm. In the sequel,
we analyze the availability constraint to generate insights that will direct us in developing a heuristic
algorithm for solving the problem. We again consider the one LRU case (dropping subscript j as
appropriate).
𝐵𝑂1 is a function of all three decision variables and so our next step is to develop closed form
expressions for the partial derivative of 𝐵𝑂1 with respect to 𝑟1 and for first differences with respect to
the discrete variables 𝑆0 and 𝑆1 (all noted henceforth as
𝜕𝐵𝑂1 (𝑋)
).
𝜕𝑋
Proposition 3
For any stocking solution (𝑆1 , 𝑆0 ), the partial derivative of expected backorders at the base, with respect
to 𝑟1 is,
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝑟1
= 𝜆 ∗ (𝐿1 − (𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃(𝑅0 ≤ 𝑆0 − 1)))) ∗ (1 − 𝑃(𝑅1 ≤ 𝑆1 − 1))
(see Appendix B, for the proof).
14
Analysis of this expression for the derivative leads to the following result which established the unimodularity of expected backorders with respect to the allocation fraction, 𝑟1 .
Theorem 1
For any stocking solution (𝑆1 , 𝑆0 ), 𝐵𝑂1 (𝑆0 , 𝑆1, 𝑟1 ) is unimodal with respect to 𝑟1 ∈ [0,1]. Moreover,
when the extremum is not at the interval bounds (i.e., 𝑟1 = 0 or 1) the value of 𝑟1 which minimizes
𝐵𝑂1 (𝑆0 , 𝑆1 ) is the solution to the following equation,
𝐿1 = 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃 ∗ (𝑅0 ≤ 𝑆0 − 1)).
Proof: For 𝐿1 > 𝑇𝑇 + 𝐿0 ,
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝑟1
is always positive and thus the depot is preferred for repairs. As
more parts are repaired at the depot (i.e., lower 𝑟1 values) we decrease the number of base backorders
reaching a minimal value at 𝑟1 = 0. If 𝐿1 < 𝑇𝑇 then
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝑟1
is always negative implying that the
base repair fraction should be increased and the number of backorders reaches a minimal value at 𝑟1 =
1. When 𝐿1 is between these upper and lower bounds, the derivative may or may not change signs. As
long as 𝐿1 < 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃(𝑅0 ≤ 𝑆0 − 1)) the derivative is negative, meaning that a larger fraction of
base repairs reduces the number of backorders. Note that as 𝑟1 increases, the delay at the depot decreases
meaning that 𝑃(𝑅0 ≤ 𝑆0 − 1) > 𝑃′ (𝑅0 ≤ 𝑆0 − 1) if 𝑟1 > 𝑟1′ and 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃(𝑅0 ≤ 𝑆0 − 1)) > 𝑇𝑇 +
𝐿0 ∗ (1 − 𝑃′ (𝑅0 ≤ 𝑆0 − 1)). For some critical value 𝑟1∗ , 𝐿1 is equal to 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃∗ (𝑅0 ≤ 𝑆0 − 1)) and
at that point
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1∗ )
𝜕𝑟1
= 0. Increasing 𝑟1 beyond this critical value results in a positive derivative
value and an increase in backorders. Thus if the derivative changes its sign, it happens only once in the
range, 0 < 𝑟1 < 1 and as a result there is only one 𝑟1∗ that minimizes base backorders.
Corollary: As we increase 𝑆0 , holding everything else unchanged, 𝑟1∗ becomes smaller.
Proof: Note that 𝑟1∗ is actually the value that equalizes 𝐿1 to 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃∗ (𝑅0 ≤ 𝑆0 − 1)) for given
𝑆0 . For 𝑆0′ > 𝑆0 , 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃∗ (𝑅0 ≤ 𝑆0′ − 1)) < 𝑇𝑇 + 𝐿0 ∗ (1 − 𝑃∗ (𝑅0 ≤ 𝑆0 − 1)) and it can be shown
that for 𝑆0′ , a longer depot delay, which corresponds to smaller 𝑟1∗ values, is needed to achieve the
equality.
15
We note here that for the case of our basic model, expected backorders is a decreasing, convex function
of either 𝑆0 or 𝑆1 separately. (Propositions 4 and 5 presented in Appendix B provide a new approach
to proving this result.)
Given our definition of availability, the optimal sum of 𝑆0∗ + 𝑆1∗ needed to satisfy the availability
constraint is a decreasing function of expected backorders, 𝐵𝑂1 . It follows then that it is optimal to
adjust 𝑟1 to achieve the lowest possible value of base backorders. Doing so can eliminate the overshoot
problem that is typical for the multi-echelon stocking sub-problem where allocation fractions are fixed,
i.e. where achieved availability is greater than the minimal target level and as a result extra inventory is
purchased.
Our framework is especially suited for organizations that are already operating a fleet of systems and
have alternatives for repair locations and an overlap in repair capabilities. In such cases, the initial TSLs
are already set and sometimes cannot be easily changed, for example when large transportation expenses
are involved. When this is not true and the organization can change the existing TSLs without significant
costs we introduce the following observation.
Observation: For a given level of inventory 𝑆 = 𝑆0 + 𝑆1 and equal repair costs it is always optimal to
set 𝑆 = 𝑆1 and 𝑆0 = 0, for any repair fraction.
The validity of this statement can be established by a sample path argument based on the fact that stock
positioned at the depot will always face a longer lead time due to the transportation time, TT > 0. We
note however, that in practice, when marginal (greedy) algorithms are used to solve the stocking
problem, it is possible to generate results where 𝑆0 > 0. This is due to the fact that the performance
metrics derived from Metric models are approximations. In the sequel, our default assumption is that
an organization that operates a fleet of systems cannot change its existing TSLs without incurring
significant costs.
4. Analysis of the problem
The structural results derived in the previous section are used in this section to explore the nature of
optimal repair/inventory management policies. We do so by decomposing the problem into several
cases based on relative (i.e. base vs. depot) values for repair lead times and unit repair costs. An analysis
16
for a single LRU holds for systems with multiple LRU due to the separability assumption in the previous
section. We demonstrate that, in general, there are three classes of policies: central repair, local repair
and a mixed policy corresponding to the case where repair may be done at both locations. In all cases,
we examine both the repair sourcing policy along with the corresponding TSL inventory policy for each
location.
The problem has certain structural properties, which are relevant to a service supply chain manager who
needs to decide on repair allocations and TSLs, for each part under management, on a periodic basis.
The four cases we consider are: Case 1: Both repair lead time and cost are higher at the base than at
the central depot, 𝐿1 > 𝐿0 + 𝑇𝑇 and 𝑐1 > 𝑐0 . Case 2: Repair lead time is smaller at the central depot
but the repair cost is higher there, i.e. 𝐿1 > 𝐿0 + 𝑇𝑇 and 𝑐1 < 𝑐0 . Case 3: Both repair lead time and
repair cost are lower at the base than at the central depot, 𝐿1 < 𝐿0 + 𝑇𝑇 and 𝑐1 < 𝑐0 . Case 4: Repair
lead time is shorter at the base, but the repair cost there is higher, i.e. 𝐿1 < 𝐿0 + 𝑇𝑇 and 𝑐1 > 𝑐0 .
We note that those cases associated with repair cost equality, i.e. 𝑐1 = 𝑐0 are covered by the nontradeoff solution associated with the inequality lead time condition, i.e. 𝐿1 < 𝐿0 + 𝑇𝑇 implies base
repair and 𝐿1 > 𝐿0 + 𝑇𝑇 implies depot repair. Similar conclusions can be drawn for lead time equality
when 𝐿1 = 𝐿0 + 𝑇𝑇, i.e. 𝑐1 > 𝑐0 implies depot repair and 𝑐1 < 𝑐0 implies base repair. The following
theorem provides a complete characterization of the different cases and their solution. (The proof is
provided in Appendix C.) We shall discuss each of the cases, describe an example for its possible
realization and provide some insights.
Theorem 2: The optimal solutions for (P1) are:
𝐿1 < 𝐿0 + 𝑇𝑇
Values
𝑐1 < 𝑐0
𝑐1 > 𝑐0
𝐿1 > 𝐿0 + 𝑇𝑇
Local repair:
A tradeoff analysis
𝑟1 = 1,𝑆0 = 0 (Case 3)
(Case 2)
A tradeoff analysis
Central repair:
(Case 4)
𝑟1 = 0,𝑆0 and 𝑆1 set optimally (Case 1)
Table 1: Optimal solutions for Problem (P1)
17
While Theorem 2 is written for a general 𝑆0 , note that applying the results of the Observation sets 𝑆0 =
0 for all cases leaves the decision maker with 𝑆1 , 𝑟1 to be determined. Nevertheless when considering
an operating organization that cannot change its current allocations (e.g., assuring assets survivability
in military settings or large transportation expenses), then 𝑆0 can be larger than 0.
In the remainder of this section we discuss managerial insights for real-life contexts corresponding to
each case. We start with Case 1, the situation in which the central repair facility, either a depot or an
external subcontractor, is more experienced and is thus faster and more cost efficient in performing the
repair. Such a situation may occur, for example, if the depot specializes in a complex system (e.g., an
engine overhaul) by maintaining it for several other customers with a large enough repair volume to
hold the needed spare parts and trained personnel to allow for quick and cost-effective maintenance. In
this case base repair is slower and more expensive and thus base repair is not attractive and we would
repair all parts centrally (𝑟1 = 0 ).
We formulate the stocking problems as:
min𝑆0 ,𝑆1 𝜆 ∗
𝑐0
𝑝
+ 𝑆1 + 𝑆0
subject to:
𝐵𝑂1 (𝑆0 , 𝑆1 , 𝑟1 ) ≤ 𝑁(1 − 𝐴),
𝑆1 , 𝑆0 ≥ 0 and integer.
Unless the availability constraint is satisfied by setting 𝑆0 = 0 and 𝑆1 = 0 we increase the TSLs until
it is satisfied. Since the objective is to minimize the investment in inventory and the base backorders
are decreasing with 𝑆0 and 𝑆1 (Propositions 4 and 5 in Appendix B), the minimum availability constraint
will be satisfied for sufficiently large integer TSL values, i.e. we apply a standard greedy solution
method to the multi-echelon problem with the allocation fraction fixed. The optimal solution is
achieved by setting 𝑆0 = 𝑆0∗ , 𝑆1 = 𝑆1∗ , 𝑟1 = 0.
Thus, when the local repair option is slower and more expensive, the optimal policy is to allocate all
part repairs to the central depot. Since a depot typically has the capability to repair everything that a
base can, this policy would use central repair for all parts satisfying the cost and lead time conditions
associated with this case.
18
An opposite situation, Case 3, occurs when the local repair is more attractive since it is faster and
cheaper. In this case the optimal solution for our model allocates as many repairs as possible to the local
depot. Here "as many as possible" means repair everything that you can at the base and only if you
cannot repair something send it to the central depot. Recall that we assume, without loss of generality,
that there is a full overlap in repair capabilities and thus it is optimal to set 𝑟1 = 1 and 𝑆0 = 0. This
follows because with 𝑟1 = 1 there are no repairs sourced from the depot; hence there is no value in
putting inventory at the depot to reduce its delay time. The problem becomes a single site problem and
finding the optimal 𝑆1 value is straightforward.
We may find situations corresponding to this case when there is a large demand for a repair from a
central repair contractor. Under such circumstances, when the contractor is operating at a high level of
utilization, central repairs will have a high repair cost and a long lead time. A concrete example of this
situation occurred in the 1990s when major cracks were discovered in the F-16 aircraft that was
operating worldwide. Lockheed Martin issued a repair program (e.g., Falcon Up—see,
http://en.wikipedia.org/wiki/F-16_Fighting_Falcon_variants#Falcon_UP) that had both a high cost and
long lead times. An alternative that several countries, with sufficient technological knowledge, adopted
was to perform the procedure at their local facilities with shorter lead times and lower costs. A different
situation occurs when the more expensive repair site is the faster one, i.e. Cases 2 and 4. It is not clear
then what the best policy is, i.e. repairing everything at the cheaper location, at the faster one or repairing
a fraction of the cases at both locations. While Theorem 2 does not give a specific answer, it indicates
that the solution will be the result of a tradeoff analysis. We consider below examples of such situations.
In Section 5, we introduce a solution algorithm for these cases. Consider a faster and more expensive
central repair facility. This case describes a classical "pay more for better service" situation. It can occur
when central repairs are outsourced to an Original Equipment Manufacturer (OEM) who provides the
best repair option (from the perspective of repair quality and lead time). Often the OEM charges more
than other repair outsource options (e.g., local repair or other certified repair locations). Two managerial
questions arise: How significant are the differences between the repair costs and the repair lead times,
and what is the impact of these differences on the optimal joint (repair and stocking) policy? A manager
would want to repair parts at the cheaper repair location, but if the lead time there is sufficiently long,
19
the incremental investment in inventory could make that choice sub-optimal. The ultimate choice will
depend upon the values of the repair costs, the demand rate (part reliability), the unit purchase price of
the item and the repair lead times at each location. We find it useful to define a relative value, 𝛼 = 𝜆 ∗
𝑐1 −𝑐0
𝑝
≤ 0 which is the ratio of the difference in base and depot repair costs to the unit purchase cost
times the failure rate. We can write the objective function as min𝑆0 ,𝑆1 ,𝑟1 𝜆 ∗
𝑐0
𝑝
+ 𝛼 ∗ 𝑟1 + (𝑆1 + 𝑆0 ).
When 𝛼 → 0, repair lead times play a dominant role and the optimal solution will be central repair
(𝑖. 𝑒. 𝑟1 → 0). This may happen if the difference between depot and base repair costs is very small or if
𝜆 is relatively small and 𝑝 is high (for example, aircraft engines). For such scenarios, unless there is a
significant difference in the repair costs, a central repair policy is superior. But when the repair cost is
significantly lower at a location, the manager may choose to direct some fraction of repairs to that site.
An opposite situation occurs when the base is faster but more expensive. Now the manager faces
conflicting choices to repair at the base with better service quality (assumed to be measured by lead
time) and pay the higher price or at the cheaper depot and incur the slower depot lead time thereby
requiring a greater investment in parts inventory. The best decision may be to adopt a mixed policy.
Lead times will dominate the solution when |𝛼| → 0 , i.e. the optimal solution will be local repair
(𝑖. 𝑒. 𝑟1 → 1, 𝑆0 → 0). But, as 𝛼 increases (𝛼 > 0), it becomes more attractive to shift some of the
repairs from the base to the depot.
A small value of 𝛼, say 0 ≤ |𝛼| ≤ 1, means that the increase in repair cost when sourcing all repairs to
the more expensive location compared to repairing everything at the cheaper one will be less than the
cost of acquiring a single copy of the spare part. The approach often taken in practice is to avoid a mixed
repair policy and to source all repairs to the faster location.
Theorem 2 defines the optimal repair sourcing solution explicitly for 2 of the 4 cases. For the other two
cases finding the optimal solution requires searching for optimal values for all three decision variables,
based on a tradeoff analysis, and thus results here need to be considered on a case-by-case basis. In the
next section we present a solution algorithm for solving these two tradeoff cases (i.e. 2 and 4).
21
5. A solution procedure
The standard solution algorithm used for solving MIME models is a greedy heuristic based on marginal
analysis that evaluates the benefit of stocking one more item at the base or at the depot. The standard
model does not take into account different repair costs or the possibility of changing the repair fraction,
which are factors introduced in our extended model. We develop an algorithm appropriate for our
model that utilizes the structural and analytical results that were developed earlier to solve (P1). The
following solution algorithm, which is described initially for a one LRU problem, and then extended to
the multiple LRU model, is only needed for two cases (Cases 2 and 4). Note that we discretize the
continuous decision variable 𝑟1 based on a suitable step size ∆𝑟1.
A heuristic procedure for Case 2: 𝐿1 > 𝐿0 + 𝑇𝑇 and 𝑐1 < 𝑐0 .
Set 𝑟1 = 1 , 𝑆0 = 0, 𝑆1 = 0. We choose this starting point since it provides a lower bound for the
objective function value.
A. If the availability constraint is not satisfied then there are two options:
1) increase the stock at the base, or 2) allocate repairs to the depot. We shall choose between the
options based on the marginal benefits, where benefit is defined as the change in backorders
divided by the corresponding change in cost. In particular, we compare
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝑟1
enough
and
⁄(𝜆 ∗ (𝑐1 − 𝑐0 )). We choose the decision 𝐷 ∈ {𝑆1 + 1, 𝑟1 − ∆𝑟1 }, with small
∆𝑟1
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝑟1
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
⁄𝑝 ,
𝜕𝑆1
(e.g.,
0.1)
that
corresponds
to
the
𝑚𝑖𝑛 {
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝑆1
⁄𝑝 ,
⁄(𝜆 ∗ (𝑐1 − 𝑐0 ))}.
B. If the backorders constraint is not satisfied go to Step C; otherwise it may be optimal to change 𝑟1
until the constraint is binding. Solve 𝐵𝑂1 (𝑆0 , 𝑆1 , 𝑟1 ) = 𝑁(1 − 𝐴) and also reverse the last decision
and solve 𝐵𝑂1 (𝑆0′ , 𝑆1′ , 𝑟1 ) = 𝑁(1 − 𝐴), where the ' superscript refers to the TSLs values of the
previous step, and find 𝑟1 numerically, i.e for eligible values (e.g., 0 < 𝑟1 < 1) calculate the
objective function value and choose the argmin. For the special case of 𝐵𝑂1 (0,0, 𝑟1 ) = 𝑁(1 − 𝐴)
we can compute the solution to the analytical expression 𝑟1 =
21
𝑁(1−𝐴)⁄𝜆−(𝐿0 +𝑇𝑇)
. Set the final values
𝐿1 −(𝐿0 +𝑇𝑇)
for the TSLs and base repair fraction as those that give the lower objective function value (i.e., the
ones found in the last optimization step or in the preceding one).
C. If 𝑟1 = 1 and the backorder constraint is not satisfied return to Step A. Otherwise choose one of
three options: 1) increase the stock at the base, 2) increase the stock at the depot or 3) allocate
repairs to the depot (if 𝑟1 > 0). Choose the decision, 𝐷 ∈ {𝑆0 + 1, 𝑆1 + 1 , 𝑟1 − ∆𝑟1 } that
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
⁄𝑝 ,
⁄𝑝 ,
⁄(𝜆
𝜕𝑆0
𝜕𝑆1
𝜕𝑟1
corresponds to the 𝑚𝑖𝑛 {
∗ (𝑐1 − 𝑐0 ))}. Go to
Step B.
A heuristic procedure for Case 4: 𝐿1 < 𝐿0 + 𝑇𝑇 and 𝑐1 > 𝑐0 .
Set 𝑟1 = 0 , 𝑆0 = 0, 𝑆1 = 0. If this starting solution satisfies the availability constraint then stop since it
provides the lowest value for the objective function.
A. If the availability constraint is not satisfied then there are three options:
1) increase the stock at the depot, 2) increase the stock at the base or 3) allocate repairs to the base.
We shall choose between them based on the marginal benefit gained from each case. We
interpret here benefits as a decrease in backorders divided by the change in costs. In particular,
we compare
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
⁄𝑝 ,
⁄𝑝 ,
⁄(𝜆
𝜕𝑆0
𝜕𝑆1
𝜕𝑟1
∗ (𝑐1 − 𝑐0 )). Following the
approach presented for the previous case we set ∆𝑟1 to a sufficiently small value and choose
the
decision,
𝐷 ∈ {𝑆0 + 1, 𝑆1 + 1 , 𝑟1 + ∆𝑟1 }
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
𝜕𝐵𝑂1 (𝑆0 ,𝑆1 ,𝑟1 )
⁄𝑝 ,
⁄𝑝 ,
⁄(𝜆
𝜕𝑆0
𝜕𝑆1
𝜕𝑟1
𝑚𝑖𝑛 {
that
corresponds
to
the
∗ (𝑐1 − 𝑐0 ))}.
B. If the backorders constraint is not satisfied, return to Step A. Otherwise it may be optimal to set the
availability constraint until it is binding for the current or the previous algorithm step and adjust 𝑟1
until the availability constraint is exactly binding. This is done by solving 𝐵𝑂1 (𝑆0 , 𝑆1 , 𝑟1 ) = 𝑁(1 −
𝐴) or 𝐵𝑂1 (𝑆0′ , 𝑆1′ , 𝑟1 ) = 𝑁(1 − 𝐴) numerically for 𝑟1 , where the ' superscript marks the TSLs value
of the previous step.
It is interesting to note that inclusion of a continuous decision variable, 𝑟1 , can lead to elimination of
the “overshoot” problem, i.e. where the best discrete stocking solution generates an availability value
strictly greater than the lower bound target. The step size, ∆𝑟1, will determine how close the algorithm
22
solution will be to one with availability overshoot. In some cases, (e.g. a very expensive part with a
very low demand rate), the cost of such overshoots can be considerable.
The following modifications to the above procedure are required to solve the multiple LRU optimization
problem:
A. For all LRUs that conform to Cases 1 and 3 set the decision variable values by Theorem 2 and
calculate the best marginal value from adding a single part.
B. For the other LRUs perform the next step (first step if this is the start) of the relevant procedure
that is described above for the one LRU problem.
C. For each LRU choose the decision that yields the best marginal value and then select the
decision that achieves the best marginal value across all LRUs.
D. If the overall availability 𝐴 is satisfied then stop. Otherwise return to Step A.
We can summarize the optimization procedure as follows. We first set the decision variable values
according to Theorem 2 for all the LRUs that meet the criteria of Cases 1 and 3. Then we deal with the
ones that fit Cases 2 and 4. For Cases 1 and 3 we apply the standard MIME marginal analysis and for
Cases 2 and 4 we apply the algorithm that was introduced above. Note, however, that we now select the
decision (either adding more stock or adjusting the fraction of repairs) for the LRU that yields the best
marginal value across all LRUs. The structural properties of our model assure us that we will find an
optimal (or near-optimal) solution.
6. Test Case Analysis
In this section we illustrate the nature of the joint optimal inventory/repair sourcing policy by applying
our solution algorithm and the results of Theorem 2 to a collection of 31 parts for the case of a single
LRU and then to an example for the multiple LRU problem. The data for the 31 parts (i.e. failure rates,
repair lead times unit purchase price) is based on a real world aerospace and defense industry program.
The names and data values have been adjusted to preserve confidentiality of the data source. To
complete missing data, we generated values for repair costs and lead times. Based on our experience,
base repair cost was randomly set to be between 1%–50% of the unit purchase price. Repair cost at the
depot was set to be between 50%–150% of the value at the base. Repair lead time at the depot was set
23
to be 50%–150% of the corresponding value at the base. All values were generated by sampling from
uniform distributions over the appropriate range. The test data is detailed in Appendix D. An optimal
solution, (i.e. S0 , S1 , r1 ) was generated by treating each part in the data base separately, i.e. there is no
interaction between the parts and thus is represented by 31 separate one LRU problems. A solution for
the multiple LRU problem at the system level, (where all parts contribute to total backorders and overall
system availability), is considered in Section 6.2, below.
6.1 Analysis of the One LRU Problem
In this example the algorithm and previous results are applied for the case where the minimal
availability target is set at 99% for each part.
𝛼
(0,6,0)
2.3
(0,3,0)
(0,10,0)
(0,3,0)
1.3
(0,3,0)
(0,1,0.63)
0.3
-0.7
(0,4,0)
(0,0,0)
(0,3,1)
0.5
(0,5,0)
(0,2,0.34)
(0,2,0)
(0,3,0.52)
0.7 (0,2,1)
(0,2,0)
(0,3,0)
(0,1,0)
(0,3,1)
(0,4,1)
0.9
(0,1,1)
(0,2,1)
1.1
(0,4,1)
-1.7
Base
Central
Mixed
(0,5,0)
(0,7,0)
(0,1,1)
1.3
(0,2,0)
(0,3,0)
1.5
(0,2,0.26)
(0,2,1)
(0,3,1) (0,2,0.78)
(0,6,0.1)
L1/(L0+TT)
Figure 2: A chart of 𝛼 (y-axis) and 𝐿1 ⁄(𝐿0 + 𝑇𝑇) (x-axis) and the optimal policy (𝑆0 , 𝑆1 , 𝑟1 ).
In general, as noted earlier, we can identify three classes of repair sourcing policies, i.e. base repair
where 𝑟1 = 1, central repair where 𝑟1 = 0, and mixed, where 𝑟1 can take on any value between 0 and
1. Figure 2 is a scatter plot of the solutions for the 31 parts in our test case sample. The y axis value is
equal to 𝛼 = 𝜆 ∗
𝑐1 −𝑐0
,
𝑝
which is a measure of the difference in repair costs relative to purchase price,
scaled by the demand rate, and the x axis is the ratio of base repair lead time to depot repair +
transportation lead time. The “diamond” and “square” points correspond to Cases 3 and 1, where
Theorem 2 indicates that the optimal policies are non-overlapping, i.e. base and central repair
respectively. The “triangle” points correspond to Cases 2 and 4, where a tradeoff analysis is required.
We note that in some instances for these cases a non-overlapping base or a central repair policy is
24
optimal. In other instances, however, a mixed policy, characterized by a fractional value for 𝑟1 , may
be generated by the algorithm. It is interesting to note how the optimal policy is driven by the relative
values of repair costs and repair lead times at the base and depot. Finally we note that these results
suggest that a rule-based approach, which defines values for 𝑟1 equal to 0 or 1, based on part parameters,
could be used to set a non-overlapping (single source) repair sourcing policy a priori.
We define two benchmark repair sourcing policies in order to gain perspective about the benefits of
joint optimization of (𝑆0 , 𝑆1 , 𝑟1 ). We chose these simple policies because we have seen them used in
real life settings. Moreover, these policies are intuitive and easy to implement. The first benchmark
policy is a time-based policy (TBP) which repairs everything at the faster location and the second is a
cost-based policy (CBP) which sources everything from the cheaper repair location. We define the
benefit from joint optimization for Cases 2 and 4 of Theorem 2 by computing the difference in total
cost between the relevant simple policy and the policy derived by our algorithm. In addition we checked
the performance of the joint optimization algorithm against its corresponding optimal solution found by
full enumeration. It is important to note that the full enumeration search can only be implemented in
smaller problem scenarios but nevertheless it gives us a measure of the expected benefit that can be
derived from our solution algorithm. We note that the solution algorithm always found the optimal
solution for the example. We observed that application of the TBP and CBP policies resulted in higher
average costs (by 8.48% and 8.47%, respectively) compared to the results of the heuristic algorithm.
Note that the solutions generated for the test case are based on the assumption that there is no initial
inventory in the system and thus all units required to reach optimal TSL levels must be purchased.
6.2 Analysis of the Multi-LRU Problem
We performed a series of additional experiments to illustrate possible benefits of applying the joint,
(multi-LRU) optimization approach in an organization that currently operates a fleet of systems and
wishes to increase its achieved level of availability. Our first goal was to validate the performance of
the joint optimization algorithm against the optimal solution found by full enumeration. Since the
necessary computational effort for the 31 part example would be vast, we conducted an experiment for
a fleet of systems, each composed of three parts, with an objective to increase the availability from 92%
25
to 95%. As in the single part experiment detailed above, the joint optimization algorithm produced nearoptimal results (an average difference of 0.05% over 4 experiments).
We then conducted a larger experiment, to illustrate the performance of the solution of our multiple
LRU algorithm relative to other policies based on a subset of 8 parts taken from our example data set.
We assumed that the 8 repairable parts selected (from the database in Appendix D) make up a system
and that all of the 𝑟1,𝑗 values for these parts have been set to 0.5. We then used TSLs values required
to achieve 95% fleet availability given the pre-set values for 𝑟1𝑗 , and calculated total inventory plus
repair costs.
Results were then developed for 4 different policies, each constrained to meet the 99% level of
availability, i.e. a policy generated by applying our joint optimization algorithm, policies associated
with the simple rules (TBP and CBP) and a policy based on maintaining fixed values for the 𝑟1𝑗 's
(equal to 0.5). The relative benefit of applying each policy was calculated by comparing its incremental
costs (relative to the 95% availability base case) to the incremental costs associated with the joint
optimization algorithm. In particular the benefit was defined as the difference in incremental costs
required to increase the availability to 99%, between the algorithm and a competing policy, divided by
the costs to increase the availability generated by the algorithm. The heuristic algorithm always
achieved the lowest total cost. The worst policy was to repair half of the parts locally and send the
remainder to the depot (185% higher costs). The benefits for the optimal solution compared to TBP
and CBP were 22.5% and 33.7% respectively. When considering only the benefits for those parts with
a mixed policy, the benefit of using the joint optimization algorithm was even higher when compared
to TBP and CBP (i.e. 144% and 148%, respectively). This is apparent by the fact that Theorem 2
specifies that TBP and CBP are indeed optimal when the faster location is also cheaper. Table 2
summarizes the benefits of the joint optimization compared to the other 3 benchmark policies.
26
Benchmark policy
Overall benefit
Benefit for mixed policy
(%)
parts (%)
TBP
22.5
144
CBP
33.7
148
185
156
𝑟1,𝑗
= 0.5
Table 2: Costs increase resulting from applying different management policies compared to the joint
optimization approach.
7. Summary
Traditional after-sales service maintenance policies are based on the notion that simple repairs should
be executed at lower echelon (base) locations and more complex repairs should be carried out at higher
echelon depots. While in many cases this policy is valid, the results of this paper are consistent with
recent trends in the industry which have adopted a more flexible approach to maintenance sourcing.
Our analysis has identified three types of repair sourcing policies which can be used, based on the
relative values of repair costs and lead times: central where all repairs are sourced from a central depot,
local where all failures are repaired at the base, and a mixed repair policy where a fraction of the parts
are repaired at the base and the remainder are repaired at the depot. When base repair is cheaper and
faster, the optimal policy is to repair all parts at the base and stock everything there. When the depot
repair is faster and cheaper, then management should source all the repairs from the depot and then
determine the base and depot TSLs according to standard MIME optimization procedures.
A mixed policy is optimal when the faster location is more expensive. In such cases there is no closedform analytical solution for the repair sourcing fractions and part TSL values that minimize total costs
while satisfying an availability constraint. Instead a solution algorithm, that extends the standard MIME
marginal analysis algorithm to include repair sourcing, must be used to compute the optimal fraction of
repair and the TSLs. The algorithm introduced here extends the standard marginal MIME model
(Greedy) algorithm which is used extensively in practice. We do so by expanding the MIME model
decision set to include both repair sourcing allocation targets and multi-echelon inventory stocking
levels. We demonstrate how this modified algorithm can be easily programmed and thus could be
27
applied directly to existing commercial service supply chain decision support systems. We note that
optimal solutions for the cases where the cost-service tradeoff must be analyzed to generate sourcing
decisions can lead to either a mixed or fixed source result, i.e. 𝑟1 is either a fraction or set to the value
of 0 or 1. Thus our model considers two levels of flexibility for repair sourcing. One involves the
selection of the best single source for repair based on explicit consideration of the cost tradeoffs and the
interaction with the associated stocking policy. The other allows for mixed sourcing where a fraction
of repairs goes to the depot. The resulting target fractions for sourcing represent a guideline that could
be used by a manager in a real-time context to inform him/her about how to prioritize specific sourcing
choices. We note that the real time sourcing decision associated with a specific part failure could be
affected by a variety of factors that are not considered in our model, e.g. capacity utilization at the repair
sites, availability of failed parts for repair, location of the failure relative to the base and depot, etc.
Our model formulation is consistent with the strategic use of service supply chain resource planning
processes, i.e. it provides optimal strategic targets for both inventory order-up-to levels and repair
sourcing fractions that are updated periodically and which provide guidance for controlling real time
material control and repair capacity utilization decisions. Our analysis of a test case (based on data
extracted from a real world aircraft support program) indicated that the optimal joint solution can lead
to cost savings of the order of 8% for single LRU systems (when we assume that starting inventory is
equal to zero), when compared to fixed allocation polices based on either cost or lead time. When
considering multiple LRU systems the (percentage) cost savings can be much higher (e.g. 20% to 35%,
if we assume simple sourcing rules which are common today, over 100% if we assume that the starting
inventory position is derived from a fixed allocation and further that benefits are based on a starting
inventory based on an availability constraint level of 95%).
The stylized model introduced in this paper has led to the development of structural results and also has
provided managerial insights into joint stocking and sourcing policy. Its primary message concerns
quantification of the value of flexible sourcing for the management of repairable parts. The results
presented here, however, provide only a starting point for future research that could be based on
expanding the scope of our model formulation and by testing our policy implications in real world
situations. One natural extension would be to develop theoretical and policy insights for the case where
28
there are multiple forward operating locations. Our analysis of this extended problem is underway and
includes consideration of pooling effects leading to stocking at a depot that supports multiple bases.
Another extension to our model would involve adding multiple indenture levels.
References
P. Alfredsson, Optimization of multi-echelon repairable item inventory systems with simultaneous
location of repair facilities, European Journal of Operational Research 99 (1997), 584-595.
S. Axsäter, Modeling emergency lateral transshipments in inventory systems, Management Science 36
(11) (1990), 1329-1338.
L. Barros, and M. Riley, A combinatorial approach to level of repair analysis, European Journal of
Operational Research 129 (2001), 242-251.
R.J.I Basten, J.M.J Schutten, and M.C. van der Heijden, An efficient model formulation for level of
repair analysis, Annals of Operations Research 172 (2009) 119–142.
R.J.I Basten, M.C. van der Heijden, and J.M.J. Schutten, Joint optimization of level of repair analysis
and spare parts stocks, BETA working paper (2011a), 346.
R.J.I Basten, M.C. van der Heijden, and J.M.J. Schutten, An approximate approach for the joint problem
of level of repair analysis and spare parts stocking, BETA working paper (2011b), 347.
K.E. Caggiano, J.A. Muckstadt, and J.A. Rappold,, Integrated real-time capacity and inventory
allocation for repairable service parts in two-echelon supply system, MSOM 8 (3) (2006), 292-319.
M. Cohen, P.R. Kleindorfer, and H.L. Lee, Service-constrained (s,S) inventory systems with priority
demand classes and lost sales, Management Science 34 (4) (1988), 482-499.
Depot
maintenance
strategic
plan
–
Part
I,
USA
Department
of
Defense.
http://www.acq.osd.mil/log/mpp/plans_reports, 2007.
A. Diaz, and M.C. Fu, Models for multi-echelon repairable inventory systems with limited repair
capacity, European Journal of Operational Research 97 (1997), 480-492.
G.J. Feeney, and C.C. Sherbrooke, The (s-1,s) inventory policy under compound poisson demand,
Management Science 12(5) (1966), 391-411.
29
D. Gaver, K. Isaacson, and J. Abell, Estimating aircraft recoverable spares requirements with
cannibalization of designated items. Rand Corporation monograph, 1993.
S.C. Graves, A multi-echelon inventory model for a repairable item with one-for-one replenishment,
Management Science 31(10) (1985), 1247-1256.
W.H. Hausman, and G.D. Scudder, Priority scheduling rules for repairable inventory systems,
Management Science 28 (1982) 1215-1232.
J. Kim, T. Kim, and S. Hur, An algorithm for repairable item inventory system with depot spares and
general repair time distribution, Applied Mathematical Modeling 31 (2007), 795-804.
H.C. Lau, and H. Song, Multi-echelon repairable item inventory system with limited repair capacity
under nonstationary demands, International Journal of Inventory Research 1 (2008), 67-92.
H.L. Lee, A multi-echelon inventory model for repairable items with emergency lateral transshipments,
Management Science 33(10) (1987), 1302-1316.
J.A. Muckstadt, A model for a multi-item, multi-echelon, multi-indenture inventory system.
Management Science 20(4) (1973) 472-481.
J.A. Muckstadt, Analysis and algorithms for service parts supply chains, Springer, USA, 2005.
A. Muller, A.C. Marquez, and B. Lung, On the concept of e-maintenance: review and current research,
Reliability Engineering System Safety 93 (2008), 1165-1187.
D.R. Nowicki, W.S. Randall, and J.E. Ramirez-Marquez, Improving the computational efficiency of
metric-based spares algorithms, European Journal of Operational Research 219 (2012), 324-334.
Y. Perlman, A. Mehrez, and M. Kaspi, Setting expediting repair policy in a multi-echelon repairableitem inventory system with limited repair capacity, Journal of the Operational Research Society 52
(2001), 198-209.
D.F. Pyke, Priority repair and dispatch policies for repairable-item logistics systems, Naval Research
Logistics 37 (1990), 1-30.
J.A. Rappold, and B.D. Van Roo, Designing multi-echelon service parts networks with finite repair
capacity, European Journal of Operational Research 199 (2009), 781-792.
W.D. Rustenburg, G.J.J.A.N. van Houtum, and W.H.M. Zijm, Exact and approximate analysis of multiechelon, multi-indenture spare parts systems with commonality. In Shanthikumar, G.J., Yao, D.D. &
31
Zijm, W.H.M. (Eds.), Stochastic modeling and optimization of manufacturing systems and supply
chains, (pp. 143-176). Dordrecht: Kluwer Academic (2003).
K. Sang-Hyun, M.A. Cohen, and S. Netessine, Performance contracting in after-sales service supply
chains, Management Science 53(12) (2007), 1843-1858.
H. Saranga, and U.D. Kumar, Optimization of aircraft maintenance/support infrastructure using genetic
algorithms—level of repair analysis, Annals of Operations Research. 143 (2006), 91-106.
C.C. Sherbrooke, Metric: A multi-echelon technique for recoverable item control, Operations Research
16 (1968), 122-141.
C.C. Sherbrooke, Optimal inventory modeling of systems. Multi-echelon techniques, 2nd ed., Kluwer,
Dordrecht, 2004.
R.M. Simon, Stationary properties of a two-echelon inventory model for low demand items,
Operations Research 19 (1971), 761-773.
A. Sleptchenko, M.C. van der Heijden, and A. van Harten, Effects of finite repair capacity in multiechelon, multi-indenture service part supply systems, International Journal of Production Economics
79 (2002), 209-230.
A. Sleptchenko, M.C. van der Heijden, and A. van Harten, Trade-off between inventory and repair
capacity in spare part networks, Journal of the Operational Research Society 54 (2003), 263-272.
A. Sleptchenko, M.C. van der Heijden, and A. van Harten, Using repair priorities to reduce stock
investment in spare parts networks, European Journal of Operational Research 163 (2005), 733-750.
Y. Wang, M.A. Cohen, and Y. Zheng, A two-echelon repairable inventory system with stocking-centerdependent depot replenishment lead times, Management Science 46(11) (2000), 1441-1453.
W.H. Zijm, and Z.M. Avsar., Capacitated two-indenture models for repairable item systems,
International Journal of Production Economics 81-82 (2003), 573-588.
31