Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Transmission line loudspeaker wikipedia , lookup
Electrical substation wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Electrical ballast wikipedia , lookup
Solar micro-inverter wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Public address system wikipedia , lookup
Negative feedback wikipedia , lookup
Audio power wikipedia , lookup
Voltage optimisation wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Stray voltage wikipedia , lookup
Power inverter wikipedia , lookup
Power MOSFET wikipedia , lookup
Voltage regulator wikipedia , lookup
Mains electricity wikipedia , lookup
Power electronics wikipedia , lookup
Current source wikipedia , lookup
Schmitt trigger wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Alternating current wikipedia , lookup
Regenerative circuit wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Buck converter wikipedia , lookup
Two-port network wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Chapter 5 – Introduction (7/5/06)
Page 5.0-1.
CHAPTER 5 – CMOS AMPLIFIERS
INTRODUCTION
Objective
Illustrate the analysis and design of amplifiers using CMOS technology.
Topics
• Introduction and Characterization
• Inverting Amplifiers
• Differential Amplifiers
• Cascode Amplifiers
Functional blocks or circuits
• Current Amplifiers
(Perform a complex function)
• Output Amplifiers
Chapter 5
Blocks or circuits
(Combination of primitives, independent)
Sub-blocks or subcircuits
(A primitive, not independent)
Fig. 5.0-1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Introduction (7/5/06)
Page 5.0-2.
Types of Amplifiers
Type of Amplifier
Output
Gain = Input
Ideal Input
Resistance
Ideal Output
Resistance
Voltage
Output Voltage
Av = Input Voltage
Infinite
Zero
Current
Output Current
Ai = Input Current
Zero
Infinite
Transconductance
Output Current
Gm = Input Voltage
Infinite
Infinite
Transresistance
Output Voltage
Rm = Input Current
Zero
Zero
Most CMOS amplifiers fit naturally into the transconductance amplifier category as they
have large input resistance and fairly large output resistance.
If the load resistance is high, the CMOS transconductance amplifier is essentially a
voltage amplifier.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Introduction (7/5/06)
Page 5.0-3.
Characterization of an Amplifier
1.) Large signal static characterization:
• Plot of output versus input (transfer curve)
• Large signal gain
• Output and input swing limits
2.) Small signal static characterization:
• AC gain
• AC input resistance
• AC output resistance
3.) Small signal dynamic characterization:
• Bandwidth
• Noise
• Power supply rejection
4.) Large signal dynamic characterization:
• Slew rate
• Nonlinearity
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Introduction (7/5/06)
Page 5.0-4.
Components of a CMOS Voltage/Transconductance Amplifier
1.) A transconductance stage that converts the input voltage to current.
2.) A transresistance stage (load) that converts the current from the transconductance
stage back to voltage.
Input
Voltage Voltage
Amplifier
Output
Voltage
Transresistance
Transconductance
Stage
Stage
Input
Output
Voltage Voltage-to Current Current-to Voltage
Current
Voltage
Conversion
Conversion
Voltage Amplifier
CMOS Analog Circuit Design
060607-01
© P.E. Allen - 2006
Chapter 5 – Introduction (7/5/06)
Page 5.0-5.
Illustration of Voltage Amplifier Components
VCC
VDD
+
VT+
2VON
+
VT+VON
-
+
VEB +
VEB +
VEC(sat)
-
-
MOS Loads
IBias
IBias
BJT Loads
IBias
IBias
+
+
VBE +
VCE(sat)
-
VT+
2VON
+
VBE
-
- V ++V
T ON
MOS Transconductors
BJT Transconductors
Fig320-01
Transconductance stages are in the lower two shaded boxes
Transresistance stages (loads) are in the upper two shaded boxes (actually, the
transconductance output also serves as a part of the load or transresistance stage)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Introduction (7/5/06)
Page 5.0-6.
Amplifier Notation
Input
Voltage Voltage
Amplifier
Output
Voltage
VDD
Input
Voltage Voltage
Amplifier
Output
Voltage
VDD
VSS
060607-02
Split Power Supplies
Single Power Supply
Simpler notation:
VDD
Input
Voltage Voltage
Amplifier
VDD
Output
Voltage
Input
Voltage Voltage
Amplifier
Output
Voltage
VSS
060607-03
CMOS Analog Circuit Design
Split Power Supplies
Single Power Supply
© P.E. Allen - 2006
Chapter 5 – Introduction (7/5/06)
Page 5.0-7.
Inverting and Noninverting Amplifiers
The types of amplifiers are based on the various configurations of the actual transistors.
If we assume that one terminal of the transistor is grounded, then three possibilities
result:
VDD
Load
−
vin
+
060608-01
VDD
VDD
vin
Load
+
vout
vin
Common
Source
+
vout
+
+
vout
Load
Common
Drain
Common
Gate
Note that there are two categories of amplifiers:
1.) Noninverting - Those whose input and output are in phase (common gate and
common drain)
2.) Inverting - Those whose input and output are out of phase (common source)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-1.
SECTION 5.1 – INVERTING AMPLIFIERS
Types of Inverting Amplifiers
The inverting amplifier or common source amplifier differs only by the type of load.
Possible types of inverting amplifiers are shown below:
VDD
VDD
M2
Load
vout
vin
060608-02
VPBias1
vout
vin
VDD
VDD
M1
vout
vin
Class A Amplifiers
M2
M2
M1
vin
vout
M1
Push-Pull Amplifier
Class A amplifiers – The current in the load transistor (M2) flows during the entire period
of a sinusoidal input.
Push-Pull (Class B and Class AB) amplifiers – The current flows in each transistor (M1
and M2) for less than the entire period of a sinusoidal input. Class B is 180° and Class
AB is between 180° and 360°.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-2.
ACTIVE LOAD INVERTER
Voltage Transfer Characteristic of the Active Load Inverter
vIN=5.0V vIN=4.5V
vIN=4.0V
0.5
vIN=3.5V
K JI
H vIN=3.0V
0.4
5V
vIN=2.5V
ID (mA)
G
M2
F
0.3
M1
vIN=2.0V
E
0.2
+
vIN
M2
0.1
vIN=1.5V
D
0.0
0
1
2
vOUT
C
3
A,B
4
5
vOUT
-
+
vOUT
W1 2μm
=
L1 1μm
-
vIN=1.0V
5
A
M2 cutoff
M2 saturated
B
4
C
3
D
2
0
0
ed
rat e
u
t
a
v
1 s cti
M 1a
M
E
F
1
Fig. 320-02
W2 = 1μm
L2 1μm
ID
1
G
H
2v
3
IN
I
4
J K
5
The boundary between active and saturation operation for M1 is
vDS1 vGS1 - VTN vOUT vIN - 0.7V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-3.
Large-Signal Voltage Swing Limits of the Active Load Inverter
Maximum output voltage, vOUT(max):
vOUT(max) VDD - |VTP|
(ignores subthreshold current influence on the MOSFET)
Minimum output voltage, vOUT(min):
Assume that M1 is nonsaturated and that VT1 = |VT2| = VT.
vDS1 vGS1 - VTN vOUT vIN - 0.7V
The current through M1 is
2
(vOUT)2
vDS1 and the
current
through
M2
is
iD = 1(vGS1 VT)vDS1 2 = 1 (VDD VT)(vOUT ) 2 2
2
2
iD = 2 (vSG2 VT)2 = 2 (VDD vOUT VT)2 = 2 (vOUT + VT VDD)2
Equating these currents gives the minimum vOUT as,
VDD VT
vOUT(min) = VDD VT 1 + ( / )
2 1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-4.
Small-Signal Midband Performance of the Active Load Inverter
The development of the small-signal model for the active load inverter is shown below:
VDD
ID
vIN
S2=B2
gm2vgs2
M2
vOUT G1
D1=D2=G2
+
vin gm1vgs1
M1
S1=B1
Rout
rds2
rds1
+
vout
-
+
vin
gm1vin
-
rds1
+
vout
-
rds2
gm2vout
Fig. 320-03
Sum the currents at the output node to get,
gm1vin + gds1vout + gm2vout + gds2vout = 0
Solving for the voltage gain, vout/vin, gives
K' W L gm1
gm1
vout
N 1 2 1/2
=
=
vin gds1 + gds2 + gm2
gm2
K'PL1W2
The small-signal output resistance can also be found from the above by letting vin = 0 to
get,
1
1
Rout = gds1 + gds2 + gm2 gm2
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-5.
Frequency Response of the MOS Diode Load Inverter
Incorporation of the parasitic
VDD
Cgs2
capacitors into the small-signal
M2
model:
Cbd2
If we assume the input voltage has a
Vout
small source resistance, then we can Cgd1
Cbd1
CL
write the following:
M1
Vin
sCM(Vout-Vin) + gmVin
Cgs1
+ GoutVout + sCoutVout = 0
Vout(Gout + sCM + sCout) = - (gm – sCM)Vin
CM
+
Vin gmVin
-
Rout
Cout
+
Vout
-
Fig. 320-04
sCM
s gmRout 1 - z 1- gm
-(gm – sCM)
Vout
1
s
Vin = Gout+ sCM + sCout = -gmRout 1+ sRout(CM + Cout) =
1 - p1
1
p1 = Rout(Cout+CM) ,
where
gm = gm1,
and
1
Rout = [gds1+gds2+gm2]-1 gm2 ,
CMOS Analog Circuit Design
and
gm1
z1 = CM
CM = Cgd1 , and
Cout = Cbd1+Cbd2+Cgs2+CL
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-6.
Frequency Response of the MOS Diode Load Inverter - Continued
If |p1| < z1, then the -3dB frequency is approximately equal to [Rout(Cout+CM)]-1.
dB
20log10(gmRout)
0dB
z1
|p1| ≈ ω-3dB
log10ω
0512-06-02.EPS
Observation:
The poles in a MOSFET circuit can be found by summing the capacitance
connected to a node and multiplying this capacitance times the equivalent resistance from
this node to ground and inverting the product.
(See Appendix 5A for details on frequency response and Bode plots)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-7.
Example 5.1-1 - Performance of an Active Resistor-Load Inverter
Calculate the output-voltage swing limits for VDD = 5 volts, the small-signal gain,
the output resistance, and the -3 dB frequency of active load inverter if (W1/L1) is 2 μm/1
μm and W2/L2 = 1 μm/1 μm, Cgd1 = 100fF, Cbd1 = 200fF, Cbd2 = 100fF, Cgs2 = 200fF,
CL = 1 pF, and ID1 = ID2 = 100μA, using the parameters in Table 3.1-2.
Solution
From the above results we find that:
vOUT(max) = 4.3 volts
vOUT(min) = 0.418 volts
Small-signal voltage gain = -1.92V/V
Rout = 9.17 k including gds1 and gds2 and 10 k ignoring gds1 and gds2
z1 = 2.10x109 rads/sec
p1 = -64.1x106 rads/sec.
Thus, the -3 dB frequency is 10.2 MHz.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-8.
CURRENT SOURCE INVERTER
Voltage Transfer Characteristic of the Current Source Inverter
vIN=5.0V vIN=4.5V
vIN=4.0V
0.5
vIN=3.5V
vIN=3.0V
0.4
5V
vIN=2.5V
2.5V
ID (mA)
0.3
0.2
KJIH F
M1
vIN=2.0V
E
M2
G
0.1
D
C
0.0
0
M2
A,B
1
2
vOUT
3
4
5
-
+
vOUT
W1 = 2μm
L1 1μm
-
vIN=1.0V
5 A B C
D
4
vOUT
+
vIN
vIN=1.5V
W2 = 2μm
L2 1μm
ID
M2 active
3 M2 saturated
ted
ura e
t
a
v
1 s ti
M 1 ac
M
2
E
1
0
0
F
1
2
G
3
H
I
4
J K
5
Fig. 5.1-5
vIN
Regions of operation for the transistors:
M1: vDS1 vGS1 -VTn vOUT vIN - 0.7V
M2: vSD2 vSG2 - |VTp| VDD-vOUT VDD -VGG2 - |VTp| vOUT 3.2V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-9.
Large-Signal Voltage Swing Limits of the Current Source Load Inverter
Maximum output voltage, vOUT(max):
vOUT (max) VDD
Minimum output voltage, vOUT(min):
Assume that M1 is nonsaturated. The minimum output voltage is,
2 VDD - VGG - |VT2| 2
1 - 1 VDD - VT1 vOUT(min) = vOUT(min) = (VDD - VT1)1 This result assumes that vIN is taken to VDD.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-10.
Small-Signal Midband Performance of the Current Source Load Inverter
Small-Signal Model:
VDD
M2
vOUT G1
+
vin
M1
-
ID
VGG2
S2=B2
vIN
rds2
D1=D2
gm1vgs1
rds1
Rout
+
vout
-
+
vin
gm1vin
-
rds1
rds2
S1=B1=G2
+
vout
Fig. 5.1-5B
Midband Performance:
2K' W gm1
vout
1
1
1
N 11/2 1 vin = gds1 + gds2 = L1ID 1 + 2 D !!! and Rout = gds1 + gds2 ID(1 + 2)
vout
vin
Strong Inversion
Weak
Inversion
log(IBias)
060614-01
≈ 1μA
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-11.
Frequency Response of the Current Source Load Inverter
Incorporation of the parasitic
VDD
Cgs2
capacitors into the small-signal
model (x is connected to VGG2): x
M2
Cbd2
If we assume the input voltage
has a small source resistance,
then we can write the following:
Vout(s)
Vin(s) =
where
Cgd2
Cgd1
Vin
Vout
Cbd1
M1
CL
CM
+
Vin gmVin
-
Cout
Rout
s +
Vout
-
Fig. 5.1-4
gmRout 1 - z 1
s
1 - p1
gm = gm1,
1
p1 = Rout(Cout+CM) ,
gm
and z1 = CM
1
and Rout = gds1 + gds2
and Cout = Cgd2 + Cbd1 + Cbd2 + CL
CM = Cgd1
Therefore, if |p1|<|z1|, then the 3 dB frequency response can be expressed as
gds1 + gds2
-3dB 1 = Cgd1 + Cgd2 + Cbd1 + Cbd2 + CL
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-12.
VDD
Example 5.1-2 - Performance of a Current-Sink Inverter
+
VSG1
A current-sink inverter is shown in Fig. 5.1-7. Assume
vIN
M1
that W1 = 2 μm, L1 = 1 μm, W2 = 1 μm, L2 = 1μm, VDD = 5
ID
vOUT
volts, VGG1 = 3 volts, and the parameters of Table 3.1-2
M2
describe M1 and M2. Use the capacitor values of Example
VGG1
5.1-1 (Cgd1 = Cgd2). Calculate the output-swing limits and the
small-signal performance.
Figure 5.1-7 Current sink CMOS inverter.
Solution
To attain the output signal-swing limitations, we treat Fig. 5.1-7 as a current source
CMOS inverter with PMOS parameters for the NMOS and NMOS parameters for the
PMOS and use NMOS equations. Using a prime notation to designate the results of the
current source CMOS inverter that exchanges the PMOS and NMOS model parameters,
110·1 3-0.7 vOUT(max)’ = 5V and vOUT(min)’ = (5-0.7)1 - 1 - 50·2 5-0-0.7
2 = 0.74V
In terms of the current sink CMOS inverter, these limits are subtracted from 5V to get
vOUT(max) = 4.26V and v OUT (min) = 0V.
To find the small signal performance, first calculate the dc current. The dc current, ID, is
KN’W1
110·1
ID = 2L1 (VGG1-VTN)2 = 2·1 (3-0.7)2 = 291μA
vout/vin = 9.2V/V, Rout = 38.1 k,
and
f-3dB = 2.78 MHz.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-13.
PUSH-PULL INVERTER
Voltage Transfer Characteristic of the Push-Pull Inverter
1.0
v =4.5V
vIN=5.0V IN
vIN=4.0V
5V
vIN=0.5V
vIN=1.0V
0.8
vIN=2.0V
ID (mA)
vIN=3.5V
vIN=1.5V
M2
0.6
vIN=2.5V
H
I
0.0
0
F
vIN=3.0V
G
J,K 1
2
vOUT
vIN=2.0V
D
3
+
vOUT
W1 1μm
=
L1 1μm
-
M1
vIN
E
vIN=3.5V vIN=4.5V
+
vIN=2.5V
0.4
0.2
W2 = 2μm
L2 1μm
ID
vIN=3.0V
-
vIN=1.5V
vIN=1.0V
4 CA,B 5
A B C
vOUT
D
E
4
ted
ura e
t
a
v
1 s ti
M 1 ac
M
3
2
1
ve
cti ated
a
r
2
M satu
2
M
F
G
0
0
1
Note
the railto-rail
output
voltage
swing
2v
3
IN
H
I
4
J K
5
Fig. 5.1-8
Regions of operation for M1 and M2:
M1: vDS1 vGS1 - VT1 vOUT vIN - 0.7V
M2: vSD2 vSG2-|VT2| VDD -vOUT VDD -vIN-|VT2| vOUT vIN + 0.7V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-14.
Small-Signal Performance of the Push-Pull Amplifier
5V
CM
M2
+
+
M1
+
vin
-
gm1vin
rds1
gm2vin
rds2
Cout
+
vout
-
vout
vin
Fig. 5.1-9
-
-
Small-signal analysis gives the following results:
K'N(W1/L1) + K'P(W2/L2)
vout (gm1 + gm2)
1 + 2
vin = gds1 + gds2 = (2/ID) 1
Rout = gds1 + gds2
gm1+gm2 gm1+gm2
(gds1 + gds2)
z = CM = Cgd1+Cgd2 and
p1 = Cgd1 + Cgd2 + Cbd1 + Cbd2 + CL
If z1 > |p1|, then
gds1 + gds2
-3dB = Cgd1 + Cgd2 + Cbd1 + Cbd2 + CL
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-15.
Example 5.1-3 - Performance of a Push-Pull Inverter
The performance of a push-pull CMOS inverter is to be examined. Assume that W1 =
1 μm, L1 = 1 μm, W2 = 2 μm, L2 = 1μm, VDD = 5 volts, and use the parameters of Table
3.1-2 to model M1 and M2. Use the capacitor values of Example 5.1-1 (Cgd1 = Cgd2).
Calculate the output-swing limits and the small-signal performance assuming that ID1 =
ID2 = 300μA.
Solution
The output swing is seen to be from 0V to 5V. In order to find the small signal
performance, we will make the important assumption that both transistors are operating
in the saturation region. Therefore:
vout -257μS - 245μS
vin = 12μS + 15μS = -18.6V/V
Rout = 37 k
f-3dB = 2.86 MHz
and
z1 = 399 MHz
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-16.
NOISE ANALYSIS OF INVERTING AMPLIFIERS
Noise Analysis of Inverting Amplifiers
Noise model:
VDD
en22
*
M2
*
VDD
M2
eout2
en12
vin
Noise
Free
MOSFETs
M1
eout2
eeq2
vin
*
Noise
Free
MOSFETs
M1
Fig. 5.1-10
Approach:
1.) Assume a mean-square input-voltage-noise spectral density en2 in series with the gate
of each MOSFET.
(This step assumes that the MOSFET is the common source configuration.)
2.) Calculate the output-voltage-noise spectral density, eout2 (Assume all sources are
additive).
3.) Refer the output-voltage-noise spectral density back to the input to get equivalent
input noise eeq2.
4.) Substitute the type of noise source, 1/f or thermal.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-17.
Noise Analysis of the Active Load Inverter
1.) See model to the right.
Noise
Noise
VDD
VDD
g Free
Free
2
e
m1
n2
MOSFETs
MOSFETs
2.) eout2 = en12 gm22+ en22
M2
M2
*
g e eout2
eout2
m22 n22
en12
eeq2
3.) eeq2 = en12 1 + gm1 en1 vin
vin
M1
M1
*
*
Up to now, the type of noise is not defined.
Fig. 5.1-10
1/f Noise
KF
B
Substituting en2= 2fCoxWLK’ = fWL , into the above gives,
B
K' B L 2
B
K' B L 21/2
2 2 1 2 2 1 1 1 1/2 eeq(1/f)2 = fW1L1 1 + K'1B1 L2 eeq(1/f) = fW1L1 1 + K'1B1 L2 To minimize 1/f noise, 1.) Make L2>>L1, 2.) increase the value of W1 and 3.) choose M1
as a PMOS.
Thermal Noise
8kT
Substituting en2= 3gm into the above gives,
W L K' 8kT
2 1 21/21/2
eeq(th) =3[2K'1(W/L)1I1]1/2 1+ L2W1K'1 To minimize thermal noise, maximize the gain of the inverter.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-18.
Noise Analysis of the Active Load Inverter - Continued
When calculating the contribution of en22 to eout2, it was assumed that the gain was
unity. To verify this assumption consider the following model:
en22
*
+
vgs2
+
gm2vgs2
rds1
rds2
eout2
_
-
Fig. 5.1-11
We can show that,
eout2 gm2(rds1||rds2) 2
en22 = 1 + gm2(rds1||rds2) 1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-19.
Noise Analysis of the Current Source Load Inverting Amplifier
Model:
VDD
en22
VGG2
*
M2
*
VDD
M2
eout2
en12
vin
Noise
Free
MOSFETs
M1
eout2
eeq2
vin
*
Noise
Free
MOSFETs
M1
Fig. 5.1-12.
The output-voltage-noise spectral density of this inverter can be written as,
eout2 = (gm1rout)2en12 + (gm2rout)2en22
or
2
e
(gm2rout)2
gm22 n2 2
2
2
2
eeq = en1 + (gm1rout)2en2 = en1 1 + gm1 en12 This result is identical with the active load inverter.
Thus the noise performance of the two circuits are equivalent although the small-signal
voltage gain is significantly different.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-20.
Noise Analysis of the Push-Pull Amplifier
Model:
VDD
en22
*
vin
M2
eout2
en12
*
Noise
Free
MOSFETs
M1
Fig. 5.1-13.
The equivalent input-voltage-noise spectral density of the push-pull inverter can be found
as
g e
g e
m1 n1 2
m2 n2 2
+ gm1 + gm2
eeq =
gm1 + gm2
If the two transconductances are balanced (gm1 = gm2), then the noise contribution of
each device is divided by two.
The total noise contribution can only be reduced by reducing the noise contribution of
each device.
(Basically, both M1 and M2 act like the “load” transistor and “input” transistor, so there
is no defined input transistor that can cause the noise of the load transistor to be
insignificant.)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 1 (7/5/06)
Page 5.1-21.
Summary of CMOS Inverting Amplifiers
Inverter
p-channel
active load
inverter
Current
source load
inverter
Push-Pull
inverter
AC Voltage
Gain
AC Output
Resistance
-gm1
gm2
1
gm2
gm2
CBD1+CGS1+CGS2+CBD2
-gm1
gds1+gds2
1
gds1+gds2
gds1+gds2
CBD1+CGD1+CDG2+CBD2
-(gm1+gm2)
gds1+gds2
1
gds1+gds2
gds1+gds2
CBD1+CGD1+CGS2+CBD2
CMOS Analog Circuit Design
Bandwidth (CGB=0)
Equivalent,
input-referred,meansquare noise voltage
en12
g m2
+ en22gm12
en12
g m2
+ en22gm12
g e
m1 n1 2 gm1en1 2
+
gm1 gm2 gm1 gm2
+
+
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-1.
SECTION 5.2 – DIFFERENTIAL AMPLIFIERS
CHARACTERIZATION OF A DIFFERENTIAL AMPLIFIER
What is a Differential Amplifier?
A differential amplifier is an amplifier that amplifies the difference between two
voltages and rejects the average or common mode value of the two voltages.
Differential and common mode voltages:
v1 and v2 are called single-ended voltages. They are voltages referenced to ac
ground.
The differential-mode input voltage, vID, is the voltage difference between v1 and v2.
The common-mode input voltage, vIC, is the average value of v1 and v2 .
v1+v2
vID = v1 - v2 and vIC = 2
v1 = vIC + 0.5vID and v2 = vIC - 0.5vID
v + v vID
1
2
v
=
A
v
±
A
v
=
A
(v
v
)
±
A
2
OUT
VD
ID
VC
IC
VD
1
2
VC
2
+
where
+
vID
vIC
AVD = differential-mode voltage gain
vOUT
2
AVC = common-mode voltage gain
Fig. 5.2-1B
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-2.
Differential Amplifier Definitions
• Common mode rejection rato (CMRR)
AVD
CMRR = AVC
CMRR is a measure of how well the differential amplifier rejects the common-mode
input voltage in favor of the differential-input voltage.
• Input common-mode range (ICMR)
The input common-mode range is the range of common-mode voltages over which
the differential amplifier continues to sense and amplify the difference signal with the
same gain.
Typically, the ICMR is defined by the common-mode voltage range over which all
MOSFETs remain in the saturation region.
• Output offset voltage (VOS(out))
The output offset voltage is the voltage which appears at the output of the differential
amplifier when the input terminals are connected together.
• Input offset voltage (VOS(in) = VOS)
The input offset voltage is equal to the output offset voltage divided by the
differential voltage gain.
VOS(out)
VOS = AVD
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-3.
Transconductance Characteristic of the Differential Amplifier
Consider the following n-channel differential
amplifier (sometimes called a source-coupled
pair):
vG1 M1
;y ;y
Where should bulk be connected? Consider a
p-well, CMOS technology,
D1 G1 S1
n+
n+
S2 G2 D2
p+
n+
+
v
IBias ID
vGS1
M4
VDD
iD2
iD1
M2 v
G2
+
vGS2
-
M3 ISS
VBulk
VDD
Fig. 5.2-2
n+
n+
p-well
n-substrate
Fig. 5.2-3
1.) Bulks connected to the sources: No modulation of VT but large common mode
parasitic capacitance.
2.) Bulks connected to ground: Smaller common mode parasitic capacitors, but
modulation of VT.
If the technology is n-well CMOS, there is no choice. The bulks must be connected to
ground.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-4.
Transconductance Characteristic of the Differential Amplifier - Continued
Defining equations:
2iD11/2
2iD21/2
vID = vGS1 vGS2 = and
ISS = iD1 + iD2
Solution:
ISS ISS vID 2vID1/2
iD1 = 2 + 2 ISS 2 4ISS
2
4
which are valid for vID < 2(ISS/)1/2.
Illustration of the result:
ISS ISS vID 2vID1/2
iD2 = 2 2 ISS 2 4ISS
2
and
4
iD/ISS
1.0
0.8
0.6
0.4
iD1
iD2
Differentiating iD1 (or iD2)
0.2
vID
with respect to vID and
0.0
-2.0 -1.414
1.414
2.0 (ISS/ß)0.5 Fig. 5.2-4
setting VID =0V gives
K' I W diD1
1 SS 1 1/2
(half the gm of an inverting amplifier)
gm = dvID(VID = 0) = (ISS/4)1/2 = 4L1 CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-5.
Voltage Transfer Characteristic of the Differential Amplifier
In order to obtain the voltage transfer characteristic, a load for the differential amplifier
must be defined. We will select a current mirror load as illustrated below.
VDD
2μm
1μm
2μm
1μm
M4
iD4 iOUT
M3
iD3
2μm
1μm
+
M1
vGS1
vG1
-
iD1
-
2μm
1μm
2μm
1μm
+
iD2
M2
-
vGS2
ISS
M5
+
VDD
2
vOUT
vG2
-
VBias
Fig. 5.2-5
Note that output signal to ground is equivalent to the differential output signal due to the
current mirror.
The short-circuit, transconductance is given as
K' I W diOUT
1 SS 11/2
gm = dvID (VID = 0) = (ISS)1/2 = L1 CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-6.
Voltage Transfer Function of the Differential Amplifer with a Current Mirror Load
VDD = 5V
2μm
1μm
+
M3
iD1
M1
vGS1 -
vG1
2μm
1μm
2μm
1μm
M2
ISS
M5
VBias
+
iD2
+
- vGS2 vOUT
vG2
-
M4 active
M4 saturated
4
M4 iD4 iOUT
vOUT (Volts)
iD3
5
2μm
1μm
2μm
1μm
3
VIC = 2V
2
M2 saturated
M2 active
1
0
-1
-0.5
0
vID (Volts)
0.5
1
060705-01
Regions of operation of the transistors:
M2 is saturated when,
vDS2 vGS2-VTN vOUT-VS1 VIC-0.5vID-VS1-VTN vOUT VIC-VTN
where we have assumed that the region of transition for M2 is close to vID = 0V.
M4 is saturated when,
vSD4 vSG4 - |VTP| VDD-vOUT VSG4-|VTP| vOUT VDD-VSG4+|VTP|
The regions of operations shown on the voltage transfer function assume ISS = 100μA.
2·50
Note: VSG4 = 50·2 +|VTP| = 1 + |VTP| vOUT 5 - 1 - 0.7 + 0.7 = 4V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-7.
Differential Amplifier Using p-channel Input MOSFETs
VDD
M5
VBias
IDD
-
+
vSG1
+
M1
iD1
iD3
vG1
M3
-
M2
vSG2
+
iD2 iOUT
iD4
M4
+
+
vG2
vOUT
-
Fig. 5.2-7
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-8.
Input Common Mode Range (ICMR)
2μm
1μm
ICMR is found by setting vID = 0 and varying vIC
M3
until one of the transistors leaves the saturation.
iD3
Highest Common Mode Voltage
2μm
1μm iD1
Path from G1 through M1 and M3 to VDD:
M1
+
VIC(max) =VG1(max) =VG2(max)
vGS1
2μm
=VDD -VSG3 -VDS1(sat) +VGS1
vG1
1μm
or
VBias
VIC(max) = VDD - VSG3 + VTN1
Path from G2 through M2 and M4 to VDD:
VIC(max)’ =VDD -VSD4(sat) -VDS2(sat) +VGS2
=VDD -VSD4(sat) + VTN2
VIC(max) = VDD - VSG3 + VTN1
Lowest Common Mode Voltage (Assume a VSS for generality)
VDD
2μm
1μm
M4
iD4 iOUT
2μm
1μm
+
iD2
M2
ISS
M5
vGS2
VDD
2
+
vOUT
vG2
-
Fig. 330-02
VIC(min) = VSS +VDS5(sat) + VGS1 = VSS +VDS5(sat) + VGS2
where we have assumed that VGS1 = VGS2 during changes in the input common mode
voltage.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-9.
Example 5.2-1 - Small-Signal Analysis of the Differential-Mode of the Diff. Amp
A requirement for differential-mode operation is that the differential amplifier is
balanced†.
VDD
iD3
iD2
iD1
M1
+
M2
vid
vout
M5
ISS
VBias
C3
D1=G3=D3=G4
M4
iD4 iout
M3
-
G1
+ vid
+
vg1
-
G2
+
vg2
C1
-
rds1
i3
1
gm3
rds3
S1=S2
rds5
gm2vgs2
gm1vgs1
D2=D4
rds2
i3
S3
G2
G1
+ vid +
+
vgs2
vgs1
gm1vgs1
-
+
vout
-
S4
D1=G3=D3=G4
i3
1
rds1 rds3 gm3
rds4
C2
iout'
D2=D4
C3
C1 gm2vgs2
S1=S2=S3=S4
i3
rds2
rds4 C2
+
vout
Fig. 330-03
Differential Transconductance:
Assume that the output of the differential amplifier is an ac short.
gm1gm3rp1
iout’ = 1 + gm3rp1 vgs1 gm2vgs2 gm1vgs1 gm2vgs2 = gmdvid
where gm1 = gm2 = gmd, rp1 = rds1rds3 and i'out designates the output current into a short
circuit.
†
It can be shown that the current mirror causes this requirement to be invalid because the drain loads are not matched. However, we will continue to
use the assumption regardless.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-10.
Small-Signal Analysis of the Differential-Mode of the Diff. Amplifier - Continued
Output Resistance:
Differential Voltage Gain:
vout
gmd
1
rout = gds2 + gds4 = rds2||rds4
Av = vid = gds2 + gds4
If we assume that all transistors are in saturation and replace the small signal parameters
of gm and rds in terms of their large-signal model equivalents, we achieve
vout (K'1ISSW1/L1)1/2
1
2 K'1W11/2
Av = vid = (2 + 4)(ISS/2) = 2 + 4 ISSL1 I
SS
Note that the small-signal gain is inversely
vout
vin
Strong Inversion
proportional to the square root of the bias
Weak
current!
InversExample:
ion
If W1/L1 = 2μm/1μm and ISS = 50μA
log(IBias)
≈ 1μA
060614-01
(10μA), then
Av(n-channel) = 46.6V/V (104.23V/V)
Av(p-channel) = 31.4V/V (70.27V/V)
1
1
rout = gds2 + gds4 = 25μA·0.09V-1 = 0.444M (2.22M)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-11.
Common Mode Analysis for the Current Mirror Load Differential Amplifier
The current mirror load differential amplifier is not a good example for common mode
analysis because the current mirror rejects the common mode signal.
VDD
-M3-M4
M1
M3
M4
+
M2
v ≈ 0V
M2 out
M1
vic
+
VBias
-
-
M5
Fig. 5.2-8A
Total common Common mode Common mode
mode Output = output due to - output due to due to vic M1-M3-M4 path M2 path Therefore:
• The common mode output voltage should ideally be zero.
• Any voltage that exists at the output is due to mismatches in the gain between the two
different paths.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-12.
Small-Signal Analysis of the Common-Mode of the Differential Amplifier
The common-mode gain of the differential amplifier with a current mirror load is ideally
zero.
To illustrate the common-mode gain, we need a different type of load so we will consider
the following:
VDD
M3
vo1
M1
vid
2
VDD
M4
vo2
M2
vo1
v1
vid
2
M3
VDD
M4
M1
M2
ISS
M5
VBias
Differential-mode circuit
vo1
vo2
v2
M3
M4
vo2
M2
M1
1
ISS
M5x 2
ISS
2
2
vic
vic
VBias
General circuit
Common-mode circuit
Fig. 330-05
Differential-Mode Analysis:
gm1
vo2
gm2
vo1
and
+
vid 2gm3
vid
2gm4
Note that these voltage gains are half of the active load inverter voltage gain.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-13.
Small-Signal Analysis of the Common-Mode of the Differential Amplifier – Cont’d
Common-Mode Analysis:
gm1vgs1
+ vgs1 Assume that rds1 is large and can be
+
+
ignored (greatly simplifies the
1
2rds5
vic
rds1 rds3 gm3 vo1
analysis).
vgs1 = vg1-vs1 = vic - 2gm1rds5vgs1
Fig. 330-06
Solving for vgs1 gives
vic
vgs1 = 1 + 2gm1rds5
The single-ended output voltage, vo1, as a function of vic can be written as
gm1[rds3||(1/gm3)]
(gm1/gm3)
gds5
vo1
vic = - 1 + 2gm1rds5 - 1 + 2gm1rds5 - 2gm3
Common-Mode Rejection Ratio (CMRR):
|vo1/vid| gm1/2gm3
CMRR = |vo1/vic| = gds5/2gm3 = gm1rds5
How could you easily increase the CMRR of this differential amplifier?
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-14.
Frequency Response of the Differential Amplifier
Back to the current mirror load differential amplifier:
VDD
Cgs3+Cgs4
M4
M3
Cbd3
Cgd4
Cgd1
vid
Cbd4
Cgd2 +
vout
CL
-
Cbd1
Cbd2
M2
M1
M5
G2
G1
D1=G3=D3=G4
+ vid +
+
i3
C3
vgs2
vgs1
1
gm1vgs1
C
1
vgs2
g
m2
gm3
S1=S2=S3=S4
iout'
D2=D4
i3
rds2
VBias
rds4 C2
+
vout
-
Fig. 330-07
Ignore the zeros that occur due to Cgd1, Cgd2 and Cgd4.
C2 = Cbd2 +Cbd4+Cgd2+CL
C1 = Cgd1+Cbd1+Cbd3+Cgs3+Cgs4,
If C3 0, then we can write
and C3 = Cgd4
gds2 + gds4
gm3 2 Vgs1(s) - Vgs2(s) where 2 s + 2
C2
ds2 + gds4 gm3 + sC1
If we further assume that gm3/C1 >> (gds2+gds4)/C2 = 2
then the frequency response of the differential amplifier reduces to
Vout(s) gm1 2 (A more detailed analysis will be made in Chapter 6)
Vid(s) gds2 + gds4
s + 2
Vout(s) g
gm1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-15.
AN INTUITIVE METHOD OF SMALL SIGNAL ANALYSIS
Simplification of Small Signal Analysis
Small signal analysis is used so often in analog circuit design that it becomes desirable to
find faster ways of performing this important analysis.
Intuitive Analysis (or Schematic Analysis)
Technique:
1.) Identify the transistor(s) that convert the input voltage to current (these transistors are
called transconductance transistors).
2.) Trace the currents to where they flow into an equivalent resistance to ground.
3.) Multiply this resistance by the current to get the voltage at this node to ground.
4.) Repeat this process until the output is reached.
Simple Example:
VDD
VDD
R1
gm1vin
vin
M2
vo1 gm2vo1
vout
R2
M1
Fig. 5.2-10C
vo1 = -(gm1vin) R1
vout = -(gm2vo1)R2
vout = (gm1R1gm2R2)vin
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-16.
Intuitive Analysis of the Current-Mirror Load Differential Amplifier
VDD
M4
M3
gm1vid gm1vid
2
2
M1 gm1vid gm2vid
2
2
+
vid
2 M5
VBias
+
vid
rout
+
M2
vid
vout
+ 2
Fig. 5.2-11
1.)
2.)
3.)
i1 = 0.5gm1vid and i2 = -0.5gm2vid
i3 = i1 = 0.5gm1vid
i4 = i3 = 0.5gm1vid
1
4.) The resistance at the output node, rout, is rds2||rds4 or gds2 + gds4
gm1vin
gm2vin
vout
gm1
5.) vout = (0.5gm1vid+0.5gm2vid )rout =gds2+gds4 = gds2+gds4 vin = gds2+gds4
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-17.
Some Concepts to Help Extend the Intuitive Method of Small-Signal Analysis
1.) Approximate the output resistance of any cascode circuit as
Rout (gm2rds2)rds1
where M1 is a transistor cascoded by M2.
2.) If there is a resistance, R, in series with the source of the transconductance transistor,
let the effective transconductance be
gm
gm(eff) = 1+gmR
Proof:
gm2(eff)vin
gm2(eff)vin
M2
gm2vgs2 iout
+ vgs2 -
M2
rds1
vin
vin
M1 vin
rds1
Small-signal model
VBias
Fig. 5.2-11A
vin
vgs2 = vg2 - vs2 = vin - (gm2rds1)vgs2 vgs2 = 1+gm2rds1
gm2vin
Thus, iout = 1+gm2rds1 = gm2(eff) vin
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-18.
FURTHER CONSIDERATIONS OF THE DIFFERENTIAL AMPLIFIER
Linearization of the Transconductance
Goal:
i
i
out
out
ISS
ISS
Linearization
vin
vin
-ISS
-ISS
060608-03
Method (degeneration):
M3
VDD
M4
M3
VDD
M4
iout
M1
+
vin
−
VNBias1
RS
2
RS
2
M5
M2
iout
VDD
2
M1
or
+
vin
−
VNBias1
M2
RS
M5
VDD
2
M6
060118-10
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-19.
Linearization with Active Devices
M3
VDD
M4
M3
VDD
M4
iout
M1
+
vin
−
VBias
iout
M2
M6
M5x1/2
VNBias1
M1
VDD
2
M2
+
or
M6
M7
vin
−
M5x1/2
M6 is in deep triode region
M5
VNBias1
060608-05
VDD
2
M6
M6 and M7 are in the triode region
Note that these transconductors on this slide and the last can all be adjusted by changing
the value of ISS.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-20.
Slew Rate of the Differential Amplifier
Slew Rate (SR) = Maximum output-voltage rate (either positive or negative)
dvOUT
It is caused by, iOUT = CL dt . When iOUT is a constant, the rate is a constant.
Consider the following current-mirror load, differential amplifiers:
VDD
VDD
iD3
iD2
iD1
+
M1
vGS1
vG1
-
M2
-
ISS
M5
VBias
M5
M4
iD4 iOUT
M3
vGS2 +
vG2
VBias
+
CL
vSG1
+
M1
+
iD1
vOUT
vG1
iD3
M3
-
-
-
IDD
M2
vSG2
+
iD2 iOUT
iD4
M4 CL
+
+
vG2
vOUT
Fig. 5.2-11B
Note that slew rate can only occur when the differential input signal is large enough to
cause ISS (IDD) to flow through only one of the differential input transistors.
ISS IDD
SR = CL = CL If CL = 5pF and ISS = 10μA, the slew rate is SR = 2V/μs.
(For the BJT differential amplifier slewing occurs at ±100mV whereas for the
MOSFET differential amplifier it can be ±2V or more.)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-21.
Noise Analysis of the Differential Amplifier
VDD
VDD
M5
M5
M5
VBias
VBias
en12
M1
*
M2
en22
eeq2
*
*
M1
M2
ito2
M3
en32
en42
*
*
vOUT
M4
Vout
M4
M3
Fig. 5.2-11C
Solve for the total output-noise current to get,
ito 2 = gm12en12 + gm22en22 + gm32en32 + gm42en42
This output-noise current can be expressed in terms of an equivalent input noise voltage,
ito2 = gm12eeq2
eeq2, given as
Equating the above two expressions for the total output-noise current gives,
g m3 2
2
2
2
eeq = en1 + en2 + gm1 en32 + en42 1/f Noise (en12=en22 and en32=en42):
Thermal Noise (en12=en22 and en32=en42):
K’ B L W L K' 2BP
16kT
3 1 31/2
N N 1 2
eeq(1/f)= fW1L1
1 + K’PBP L3
eeq(th)= 3[2K' (W/L) I ]1/2 1+ L3W1K'1 1
1 1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-22.
DIFFERENTIAL AMPLIFIERS WITH DIFFERENTIAL OUTPUT
Current-Source Load Differential Amplifier
VDD
Gives a truly balanced differential amplifier.
M3
X1
M7
Also, the upper input common-mode range is
extended.
v3
v1
IBias
X1
M4
X1
I3
I4
I1
I2
M1 X1
M5
M6
However, a problem occurs if I1 I3 or if I2 I4.
X1
v4
v2
X1 M2
I5
X2
Fig. 5.2-12
Current
Current
0
0
I3
I1
I3
VDS1<VDS(sat)
(a.) I1>I3.
CMOS Analog Circuit Design
VDD
vDS1 0
0
I1
VSD3<VSD(sat)
(b.) I3>I1.
VDD
vDS1
Fig. 5.2-13
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-23.
A Differential-Output, Differential-Input Amplifier
Probably the best way to solve the current mismatch problem is through the use of
common-mode feedback.
Consider the following solution to the previous problem.
VDD
M3
M4
IBias MC3
Commonmode feedback circuit
MC1
I3
v3
MC4
IC4
IC3
I4
MC2A
v1
VCM
M1
MC2B
MC5
M2
v4
Selfresistances
of M1-M4
v2
M5
MB
VSS
Fig. 5.2-14
Operation:
• Common mode output voltages are sensed at the gates of MC2A and MC2B and
compared to VCM.
• The current in MC3 provides the negative feedback to drive the common mode output
voltage to the desired level.
• With large values of output voltage, this common mode feedback scheme has flaws.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-24.
Common-Mode Stabilization of the Diff.-Output, Diff.-Input Amplifier - Continued
The following circuit avoids the large differential output signal swing problems.
VDD
M3
IBias MC3
Commonmode feedback circuit
MC4
IC4
IC3
MC1
MC2
v3
RCM1
MC5
I3
I4
RCM2
v1
VCM
M4
M1
M2
v4
Selfresistances
of M1-M4
v2
M5
MB
VSS
Fig. 5.2-145
Note that RCM1 and RCM2 must not load the output of the differential amplifier.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-25.
DESIGNING DIFFERENTIAL AMPLIFIERS
Design of a CMOS Differential Amplifier with a Current Mirror Load
VDD
Design Considerations:
Constraints
Specifications
Small-signal gain
Power supply
M3
M4
Frequency response (CL)
Technology
vout
Temperature
ICMR
CL
Slew rate (CL)
+
vin M1
M2
Power dissipation
Relationships
Av = gm1Rout
I5
-3dB = 1/RoutCL
M5
VBias
VIC(max) = VDD - VSG3 + VTN1
ALA20
VSS
VIC(min) = VSS +VDS5(sat) + VGS1 = VSS
+VDS5(sat) + VGS2
SR = ISS/CL
Pdiss = (VDD+|VSS|)xAll dc currents flowing from VDD or to VSS
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-26.
Design of a CMOS Differential Amplifier with a Current Mirror Load - Continued
Schematic-wise, the design procedure is illustrated as
shown:
Max. ICMR
VSG4
-
M3
+
VDD
M4
vout
gm1Rout
+
vin
M1
Min. ICMR
+
VBias
-
CL
M2
I5
I5 = SR·CL,
ω-3dB, Pdiss
M5
VSS
CMOS Analog Circuit Design
Procedure:
1.) Pick ISS to satisfy the slew rate knowing CL or
the power dissipation
2.) Check to see if Rout will satisfy the frequency
response, if not change ISS or modify circuit
3.) Design W3/L3 (W4/L4) to satisfy the upper ICMR
4.) Design W1/L1 (W2/L2) to satisfy the gain
5.) Design W5/L5 to satisfy the lower ICMR
6.) Iterate where necessary
ALA20
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-27.
Example 5.2-2 - Design of a MOS Differential Amp. with a Current Mirror Load
Design the currents and W/L values of the current mirror load MOS differential amplifier
to satisfy the following specifications: VDD = -VSS = 2.5V, SR 10V/μs (CL=5pF), f3dB 100kHz (CL=5pF), a small signal gain of 100V/V, -1.5VICMR2V and Pdiss
1mW. Use the parameters of KN’=110μA/V2, KP’=50μA/V2, VTN=0.7V, VTP=-0.7V,
N=0.04V-1 and P=0.05V-1.
Solution
1.) To meet the slew rate, ISS 50μA. For maximum Pdiss, ISS 200μA.
2
2.) f-3dB of 100kHz implies that Rout 318k. Therefore Rout = (N+P)ISS 318k
ISS 70μA Thus, pick ISS = 100μA
3.) VIC(max) = VDD - VSG3 + VTN1 2V = 2.5 - VSG3 + 0.7
2·50μA
VSG3 = 1.2V =
50μA/V2(W3/L3) + 0.7
W3 W4
2
L3 = L4 = (0.5)2 = 8
2·110μA/V2(W1/L1)
gm1
4.) 100=gm1Rout=gds2+gds4 = (0.04+0.05) 50μA = 23.31
W1
W1 W2
L1
L1= L2 =18.4
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 2 (7/5/06)
Page 5.2-28.
Example 5.2-2 - Continued
5.) VIC(min) = VSS +VDS5(sat)+VGS1 -1.5 = -2.5+VDS5(sat)+
VDS5(sat) = 0.3 - 0.222 = 0.0777 2·50μA
110μA/V2(18.4) + 0.7
W5
2ISS
=
L5 KN’VDS5(sat)2 = 150.6
We probably should increase W1/L1 to reduce VGS1. If we choose W1/L1 = 40, then
VDS5(sat) = 0.149V and W5/L5 = 41. (Larger than specified gain should be okay.)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-1.
SECTION 5.3 – CASCODE (COMMON GATE) AMPLIFIERS
VOLTAGE-DRIVEN COMMON GATE AMPLIFIER
Common Gate Amplifier
VDD
VDD
VPBias1
Circuit:
R
L
M3
vOUT
vOUT
VNBias2
VNBias2
IBias
vIN
VNBias1
vIN
M2
M1
060609-01
Large Signal Characteristics:
VOUT(max) VDD – VDS3(sat)
vOUT
VDD
VON3
VOUT(min) VDS1(sat) + VDS2(sat)
Note VDS1(sat) = VON1
VON2
VON1+VON2
VON1
VT2
VNBias2
vIN
060609-02
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-2.
Small Signal Performance of the Common Gate Amplifier
Small signal model:
rds2
Rin
vin
−
rds1 vgs2 gm2vgs2
rds3
+
rds2
Rin
Rout
vout
vin
i1
+
rds1 vs2 gm2vs2
rds3
−
Rout
vout
060609-03
rds2 gm2rds2rds3
vout = gm2vs2 rds2+rds3rds3 = rds2+rds3 vin
vout
gm2rds2rds3
Av = vin = + rds2+rds3
Rin = Rin’||rds1, Rin’ is found as follows
vs2 = (i1 - gm2vs2)rds2 + i1rds3 = i1(rds2 + rds3) - gm2 rds2vs2
vs2
rds2 + rds3
Rin' = i1 = 1 + gm2rds2
rds2 + rds3
Rin = rds1||1 + gm2rds2
Rout rds2||rds3
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-3.
Frequency Response of the Common Gate Amplifier
Circuit:
VDD
VPBias1
Cgd3
Cgd2
VNBias2
vIN
VNBias1
M3
rds2
Cbd3 vOUT
Cbd2
M2
CL
Vin
+
rds1 Vs2 gm2Vs2
rds3
−
Cout
Vout
M1
060609-04
The frequency response can be found by replacing rds3 in the previous slide with,
rds3
rds3 srds3Cout + 1
where Cout = Cgd2 + Cgd3 + Cbd2 + Cbd3 + CL
Vout
gm2rds2rds3
gm2rds2rds3 1 1
= + r +r
Av(s) = Vin = + rds2+rds3 rds2rds3Cout
s ds2 ds3 s
1 - p1
rds2+rds3 + 1
where
-1
p1 = rds2rds3 Cout
rds2+rds3
-3dB = |p1|
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-4.
VOLTAGE-DRIVEN CASCODE AMPLIFIER
Cascode Amplifier
VDD
VPBias1
VNBias2
M3
vOUT
M2
M1
vIN
060609-05
Advantages of the cascode amplifier:
• Increases the output resistance and gain (if M3 is cascaded also)
• Eliminates the Miller effect when the input source resistance is large
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-5.
Large-Signal Characteristics of the Cascode Amplifier
vIN=5.0V
vIN=4.5V
0.5
0.3
vIN=2.5V
ID (mA)
0.4
vIN=4.0V
vIN=3.5V
vIN=3.0V
K
0.2
5V
M3 W3 2μm
=
L3 1μm
ID
2.3V
M2
G F
E
JIH
M3
0.1
0.0
0
D
2
vOUT
3
4
M1
vIN=1.5V
A,B
1
vIN=2.0V 3.4V
5
+
vIN
C
vIN=1.0V
+
W2 = 2μm
L2 1μm
vOUT
W1 2μm
=
L1 1μm
-
-
5 A B C
D
4
vOUT
E
3
M3 active
M3 saturated
M2 saturated
M2 active
2
F
1
Fig. 5.3-2
0
0
M1 saturated
1
G H
M1
active
I
2v
3
IN
4
J K
5
M1 sat. when VGG2-VGS2 VGS1-VT vIN 0.5(VGG2+VTN) where VGS1=VGS2
M2 sat. when VDS2VGS2-VTN vOUT-VDS1VGG2-VDS1-VTN vOUT VGG2-VTN
M3 is saturated when VDD-vOUT VDD - VGG3 - |VTP| vOUT VGG3 + |VTP|
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-6.
Large-Signal Voltage Swing Limits of the Cascode Amplifier
Maximum output voltage, vOUT(max):
vOUT(max) = VDD
Minimum output voltage, vOUT(min):
Referencing all potentials to the negative power supply (ground in this case), we may
express the current through each of the devices, M1 through M3, as
2 vDS1
iD1 = 1 (VDD - VT1)vDS1 - 2 1(VDD - VT1)vDS1
iD2 = 2 (VGG2 - vDS1 - VT2)(vOUT - vDS1) 2(VGG2 - vDS1 - VT2)(vOUT - vDS1)
(vOUT - vDS1)2
2
and
3
(V VGG3 |VT3|)2
2 DD
where we have also assumed that both vDS1 and vOUT are small, and vIN = VDD.
Solving for vOUT by realizing that iD1 = iD2 = iD3 and 1 = 2 we get,
3
1
1
vOUT(min) = 22 (VDD VGG3 |VT3|)2 VGG2 VT2 + VDD VT1
iD3 =
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-7.
Example 5.3-1 - Calculation of the Min. Output Voltage for the Cascode Amplifier
(a.) Assume the values and parameters used for the cascode configuration plotted in the
previous slide on the voltage transfer function and calculate the value of vOUT(min).
(b.) Find the value of vOUT(max) and vOUT(min) where all transistors are in saturation.
Solution
(a.) Using the previous result gives,
vOUT(min) = 0.50 volts.
We note that simulation gives a value of about 0.75 volts. If we include the influence of
the channel modulation on M3 in the previous derivation, the calculated value is 0.62
volts which is closer. The difference is attributable to the assumption that both vDS1 and
vOUT are small.
(b.) The largest output voltage for which all transistors of the cascode amplifier are in
saturation is given as
vOUT(max) = VDD - VSD3(sat)
and the corresponding minimum output voltage is
vOUT(min) = VDS1(sat) + VDS2(sat) .
For the cascode amplifier of Fig. 5.3-2, these limits are 3.0V and 2.7V.
Consequently, the range over which all transistors are saturated is quite small for a 5V
power supply.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-8.
Small-Signal Midband Performance of the Cascode Amplifier
Small-signal model:
gm2vgs2= -gm2v1
D1=S2
G1
D2=D3
rds2
+
+
+
vin =
v1
r
v
ds3
out
vgs1 gm1vgs1
rds1
S1=G2=G3
Small-signal model of cascode amplifier neglecting the bulk effect on M2.
C1
rds2
D1=S2
D2=D3
G1
+
+
+
vin
1
v1
gm2v1
gm1vin
rds3
C3
vout
rds1 gm2 C2
Simplified equivalent model of the above circuit.
Fig. 5.3-3
Using nodal analysis, we can write,
[gds1 + gds2 + gm2]v1 gds2vout = gm1vin
[gds2 + gm2]v1 + (gds2 + gds3)vout = 0
Solving for vout/vin yields
vout
gm1(gds2 + gm2)
=
vin gds1gds2 + gds1gds3 + gds2gds3 + gds3gm2
The small-signal output resistance is,
rout = [rds1 + rds2 + gm2rds1rds2]||rds3 rds3
CMOS Analog Circuit Design
gm1
gds3 = 2K'1W1
L1ID23
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-9.
Small-Signal Analysis of the Cascode Amplifier - Continued
It is of interest to examine the voltage gain of v1/vin. From the previous nodal equations,
g
v1
gm1(gds2+gds3)
2gm1
W1L2
ds2+gds3 gm1
=
vin gds1gds2+gds1gds3+gds2gds3+gds3gm2 gds3 gm2 gm2 = 2
L1W2
If the W/L ratios of M1 and M2 are equal and gds2 = gds3, then v1/vin is approximately 2.
Why is this gain -2 instead of -1?
gm2vs2
iA
Rs2
Consider the small-signal model looking into the
i1
iB
source of M2:
rds3
The voltage loop is written as,
vs2
rds2
vs2 = (i1 - gm2vs2)rds2 + i1rds3
Fig. 5.3-4
Solving this equation for the ratio of vs2 to i1
= i1(rds2 + rds3) - gm2 rds2vs2
gives
vs2
rds2 + rds3
Rs2 = i1 = 1 + gm2rds2
We see that Rs2 equals 2/gm2 if rds2 rds3. Thus, if gm1 gm2, the voltage gain v1/vin -2.
Note that:
rds3 =0 that Rs21/gm2 or rds3=rds2 that Rs22/gm2 or rds3rds2gmrds that Rs2rds!!!
Principle: The small-signal resistance looking into the source of a MOSFET depends on
the resistance connected from the drain of the MOSFET to ac ground.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-10.
Frequency Response of the Cascode Amplifier
Small-signal model (RS = 0):
C1
rds2
D1=S2
G1
where
+
+
vin
C1 = Cgd1,
1
v
gm2v1
gm1vin
1
rds1 gm2 C2
C2 = Cbd1+Cbs2+Cgs2, and
C3 = Cbd2+Cbd3+Cgd2+Cgd3+CL
The nodal equations now become:
(gm2 + gds1 + gds2 + sC1 + sC2)v1 gds2vout = (gm1 sC1)vin
and
(gds2 + gm2)v1 + (gds2 + gds3 + sC3)vout = 0
Solving for Vout(s)/Vin(s) gives,
(gm1 sC1)(gds2 + gm2)
Vout(s) 1
=
Vin(s) 1 + as + bs2 gds1gds2 + gds3(gm2 + gds1 + gds2)
where
C3(gds1 + gds2 + gm2) + C2(gds2 + gds3) + C1(gds2 + gds3)
a=
gds1gds2 + gds3(gm2 + gds1 + gds2)
and
C3(C1 + C2)
b = gds1gds2 + gds3(gm2 + gds1 + gds2)
CMOS Analog Circuit Design
D2=D3
rds3
C3
+
vout
-
Fig. 5.3-4A
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-11.
A Simplified Method of Finding an Algebraic Expression for the Two Poles
Assume that a general second-order polynomial can be written as:
1
s s 1 s2
P(s) = 1 + as + bs2 = 1 p1 1 p2
= 1 s p1 + p2 + p1p2
Now if |p2| >> |p1|, then P(s) can be simplified as
s2
s
P(s) 1 p1 + p1p2
Therefore we may write p1 and p2 in terms of a and b as
1
a
p1 = a and p2 = b
Applying this to the previous problem gives,
[gds1gds2 + gds3(gm2 + gds1 + gds2)]
gds3
p1 = C3(gds1 + gds2 + gm2) + C2(gds2 + gds3) + C1(gds2 + gds3) C3
The nondominant root p2 is given as
[C3(gds1 + gds2 + gm2) + C2(gds2 + gds3) + C1(gds2 + gds3)]
gm2
p2 =
C3(C1 + C2)
C1 + C2
Assuming C1, C2, and C3 are the same order of magnitude, and gm2 is greater than gds3,
then |p1| is smaller than |p2|. Therefore the approximation of |p2| >> |p1| is valid.
Note that there is a right-half plane zero at z1 = gm1/C1.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-12.
NON-VOLTAGE DRIVEN CASCODE AMPLIFIER – THE MILLER EFFECT
Miller Effect
Consider the following inverting amplifier:
I1
Solve for the input impedance:
V1
Zin(s) = I1
+
CM
-Av
V1
−
+
V2 = -AvV1
−
060610-03
I1 = sCM(V1 – V2) = sCM(V1 + AvV1) = sCM(1 + Av)V1
Therefore,
V1
V1
1
1
Zin(s) = I1 = sCM(1 + Av)V1 = sCM(1 + Av) = sCeq
The Miller effect can take Cgd = 5fF and make it look like a 0.5pF capacitor in parallel
with the input of the inverting amplifier (Av -100).
If the source resistance is large, this creates a dominant pole at the input.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-13.
Simple Inverting Amplifier Driven with a High Source Resistance
VDD
C2
Examine the frequency
M2
+
response of a current-source load
+
Vin
VGG2
vout
C
V
V
3
C
1
R
out
1
s
R3
Rs
inverter driven from a high
g V
- m1 1
M1
resistance source:
vin
C1 ≈ Cgs1
C3 = Cbd1 + Cbd2 + Cgd2
Rs
Assuming the input is Iin, the Rs
R3 = rds1||rds2
C2 = Cgd1
Fig. 5.3-5
nodal equations are,
[G1 + s(C1 + C2)]V1 sC2Vout = Iin and (gm1sC2)V1+[G3+s(C2+C3)]Vout = 0
where
G1 = Gs (=1/Rs), G3 = gds1 + gds2, C1 = Cgs1, C2 = Cgd1 and C3 = Cbd1+Cbd2 + Cgd2.
Solving for Vout(s)/Vin(s) gives
(sC2gm1)G1
Vout(s)
=
or,
Vin(s) G1G3+s[G3(C1+C2)+G1(C2+C3)+gm1C2]+(C1C2+C1C3+C2C3)s2
[1s(C2/gm1)]
Vout(s) gm1
=
Vin(s) G3 1+[R1(C1+C2)+R3(C2+C3)+gm1R1R3C2]s+(C1C2+C1C3+C2C3)R1R3s2
Assuming that the poles are split allows the use of the previous technique to get,
gm1C2
1
1
p1 = R1(C1+C2)+R3(C2+C3)+gm1R1R3C2 gm1R1R3C2 and p2 C1C2+C1C3+C2C3
The Miller effect has caused the input pole, 1/R1C1, to be decreased by a value of gm1R3.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-14.
How Does the Cascode Amplifier Solve the Miller Effect?
Cascode amplifier:
VDD
VPBias1
M3
VNBias2
M2
+
Cgd1
RS
vS
+
vIN
-
Rs2
+
v1
M1 −
vOUT
−
060610-02
The Miller effect causes Cgs1 to be increased by the value of 1 + (v1/vin) and appear in
parallel with the gate-source of M1 causing a dominant pole to occur.
The cascode amplifier eliminates this problem by keeping the value of v1/vin small by
making the value of Rs2 approximately 2/gm2.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-15.
Comparison of the Inverting and Cascode Non-Voltage Driven Amplifiers
The dominant pole of the inverting amplifier with a large source resistance was found to
be
1
p1(inverter) = R1(C1+C2)+R3(C2+C3)+gm1R1R3C2
Now if a cascode amplifier is used, R3, can be approximated as 2/gm of the cascoding
transistor (assuming the drain sees an rds to ac ground).
p1(cascode) =
1
2 2 R1(C1+C2)+ gm(C2+C3)+gm1R1gmC2
1
1
R1(C1+3C2)
2 R1(C1+C2)+ gm(C2+C3)+2R1C2
Thus we see that p1(cascode) >> p1(inverter).
=
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-16.
High Gain and High Output Resistance Cascode Amplifier
V
M4 DD
If the load of the cascode
D2=D3
VPBias1
amplifier is a cascode
current source, then both VPBias2 M3
gm2v1 gmbs2v1 rds2 gm3v4
vout
high output resistance
M2
D1=S2
G1
Rout
and high voltage gain is VNBias2
+
+
achieved.
M1
vin
vin
gm1vin
-
v1
rds1
+
gmbs3v4 rds3
D4=S3
+
v4
vout
rds4
-
G2=G3=G4=S1=S4
060609-07
The output resistance is,
-1.5
rout [gm2rds1rds2][gm3rds3rds4] =
ID
1 2
34
+
2K'2(W/L)2
2K'3(W/L)3
Knowing rout, the gain is simply
-1
2K'1(W/L)1ID
Av = gm1rout gm1{[gm2rds1rds2][gm3rds3rds4]} 1 2
34
+
2K'2(W/L)2
2K'3(W/L)3
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-17.
Example 5.3-2 - Comparison of the Cascode Amplifier Performance
Calculate the small-signal voltage gain, output resistance, the dominant pole, and the
nondominant pole for the low-gain, cascode amplifier and the high-gain, cascode
amplifier. Assume that ID = 200 microamperes, that all W/L ratios are 2μm/1μm, and
that the parameters of Table 3.1-2 are valid. The capacitors are assumed to be: Cgd = 3.5
fF, Cgs = 30 fF, Cbsn = Cbdn = 24 fF, Cbsp = Cbdp = 12 fF, and CL = 1 pF.
Solution
The low-gain, cascode amplifier has the following small-signal performance:
Av = 37.1V/V
Rout = 125k
p1 -gds3/C3 1.22 MHz
p2 gm2/(C1+C2) 605 MHz.
The high-gain, cascode amplifier has the following small-signal performance:
Av = 414V/V
Rout = 1.40 M
p1 1/RoutC3 108 kHz
p2 gm2/(C1+C2) 579 MHz
(Note at this frequency, the drain of M2 is shorted to ground by the load capacitance, CL)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-18.
Designing Cascode Amplifiers
Pertinent design equations for the simple cascode amplifier.
I=
VDD
KPW3
2
2L3 (VDD - VGG3-|VTP|)
vOUT(max) = VDD - VSD3(sat)
2I
=VDD KP(W3/L3)
M3
vOUT(min) =VDS1(sat) + VDS2(sat)
2I
2I
=
+
KN(W1/L1) KN(W2/L2)
VGG3
+
M2
VGG2
I
VGG2 = VDS1(sat) + VGS2 +
vIN
-
Fig. 5.3-7
CMOS Analog Circuit Design
vOUT
I = Pdiss = (SR)·Cout
VDD
M1
-
g
1/L1)
|Av| = g m1 = 2KN(W
ds3
λP2I
© P.E. Allen - 2006
Chapter 5 – Section 3 (7/5/06)
Page 5.3-19.
Example 5.3-3 - Design of a Cascode Amplifier
The specs for a cascode amplifier are Av = -50V/V, vOUT(max) = 4V, vOUT(min) = 1.5V,
VDD=5V, and Pdiss=1mW. The slew rate with a 10pF load should be 10V/μs or greater.
Solution
The slew rate requires a current greater than 100μA while the power dissipation
requires a current less than 200μA. Compromise with 150μA. Beginning with M3,
W3
2I
2·150
=
=
2
L3 KP[VDD-vOUT(max)] 50(1)2 = 6
2I
2·150
From this find VGG3: VGG3 = VDD - |VTP| - KP(W3/L3) = 5 - 1 50·6 = 3V
W1 (Av)2I (50·0.05)2(150)
= 2.73
2·110
L1 = 2KN =
To design W2/L2, we will first calculate VDS1(sat) and use the vOUT(min) specification to
2I
2·150
VDS1(sat) = KN(W1/L1) = 110·4.26 = 0.8V
define VDS2(sat).
Next,
Subtracting this value from 1.5V gives VDS2(sat) = 0.7V.
W2
2I
2·150
L2 = KNVDS2(sat)2 = 110·0.72 = 5.57
2I
Finally,
VGG2 = VDS1(sat) + KN(W2/L2) + VTN = 0.8V+ 0.7V + 0.7V = 2.2V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-1.
SECTION 5.4 – CURRENT AMPLIFIERS
What is a Current Amplifier?
• An amplifier that has a defined output-input current relationship
• Low input resistance
• High output resistance
Application of current amplifiers:
ii
io
ii
Ai
iS
Current
Amplifier
RS
Single-ended input.
RS >> Rin
iS
RL
RS
ii
+
-
io
Ai
Current
Amplifier
Differential input.
RL
Fig. 5.4-1
and Rout >> RL
Advantages of current amplifiers:
• Currents are not restricted by the power supply voltages so that wider dynamic
ranges are possible with lower power supply voltages.
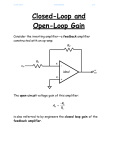
• -3dB bandwidth of a current amplifier using negative feedback is independent of the
closed loop gain.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-2.
Frequency Response of a Current Amplifier with Current Feedback
Consider the following current amplifier with resistive
i2 - R2
negative feedback applied.
i1
Ai
R1
io
vout
+
Assuming that the small-signal resistance looking into
the current amplifier is much less than R1 or R2,
vin
io = Ai(i1-i2) = Ai R1 - io
Solving for io gives
A v
R2 Ai i in
vout = R2io = R1 1+Ai vin
io = 1+Ai R1
vin
Fig. 5.4-2
Ao
, then
If Ai(s) = s
+
1
A
R2 Ao vout R2 1 R2 Ao
1
=
=
=
1 R1 s
vin R1 R
1+A
s
1
o A +(1+Ao)
1+ Ai(s)
A(1+Ao) +1
-3dB = A(1+Ao)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-3.
Bandwidth Advantage of a Current Feedback Amplifier
The unity-gainbandwidth is,
R2
R2
R2Ao
GB = |Av(0)| -3dB = R1(1+Ao) · A(1+Ao) = R1 Ao·A = R1 GBi
where GBi is the unity-gainbandwidth of the current amplifier.
Note that if GBi is constant, then increasing R2/R1 (the voltage gain) increases GB.
Illustration:
Magnitude dB
R
Voltage Amplifier, R2 > K
R2 Ao
1
dB
R2
R1 1+Ao
Voltage Amplifier, R = K >1
1
Ao
dB
K
1+Ao
Current Amplifier
Ao dB
(1+Ao)ωA
0dB
ωA
GBi
GB1 GB2
log10(ω)
Fig. 7.2-10
Note that GB2 > GB1 > GBi
The above illustration assumes that the GB of the voltage amplifier realizing the voltage
buffer is greater than the GB achieved from the above method.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-4.
Current Amplifier using the Simple Current Mirror
VDD
VDD
I1
iin
M1
I2
R
iout
M2
iin
+
vin
gm1vin
-
and
C2
rds1
C1
gm2vin
rds2
RL
≈0
C3
Fig. 5.4-3
Current Amplifier
1
1
Rin = gm1 Rout = 1Io
iout
W2/L2
Ai = W1/L1 .
Frequency response:
-(gm1+gds1)
-(gm1+gds1)
-gm1
p1 = C1+C2 = Cbd1+Cgs1+Cgs2+Cgd2 Cbd1+Cgs1+Cgs2+Cgd2
Note that the bandwidth can be almost doubled by including the resistor, R.
(R removes Cgs1 from p1)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-5.
Example 5.4-1- Performance of a Simple Current Mirror as a Current Amplifier
Find the small-signal current gain, Ai, the input resistance, Rin, the output resistance,
Rout, and the -3dB frequency in Hertz for the current amplifier of Fig. 5.4-3(a) if 10I1 = I2
= 100μA and W2/L2 = 10W1/L1 = 10μm/1μm. Assume that Cbd1 = 10fF, Cgs1 = Cgs2 =
100fF, and Cgs2 = 50fF.
Solution
Ignoring channel modulation and mismatch effects, the small-signal current gain,
W2/L2
Ai = W1/L1 10A/A.
The small-signal input resistance, Rin, is approximately 1/gm1 and is
1
1
Rin 2K (1/1)10μA = 46.9μS = 21.3k
N
The small-signal output resistance is equal to
1
Rout = NI2 = 250k.
The -3dB frequency is
46.9μS
-3dB = 260fF = 180.4x106 radians/sec. f-3dB = 28.7 MHz
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-6.
Wide-Swing, Cascode Current Mirror Implementation of a Current Amplifier
VDD
VDD
IIN
IOUT
iin
iout
+
VNBias2
M3
M4
vIN
+
vOUT
M1
M2
−
−
060610-01
1
Rin gm1,
Rout rds2gm4rds4,
and
W2/L2
Ai = W1/L1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-7.
Example 5.4 -2 - Current Amplifier Implemented by the Wide-Swing, Cascode
Current Mirror
Assume that IIN and IOUT of the wide-swing cascode current mirror are 100μA. Find
the value of Rin, Rout, and Ai if the W/L ratios of all transistors are 182μm/1μm.
Solution
The input resistance requires gm1 which is 2·110·182·100 = 2mS
Rin 500
From our knowledge of the cascode configuration, the small signal output resistance
should be
Rout gm4rds4rds2 = (2001μS)(250k)(250k) = 125M
Because VDS1 = VDS2, the small-signal current gain is
W2/L2
Ai = W1/L1 = 1
Simulation results using the level 1 model for this example give
Rin= 497, Rout = 164.7M and Ai = 1.000 A/A.
The value of VON for all transistors is
VON =
CMOS Analog Circuit Design
2·100μA
110μA/V2·182 = 0.1V
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-8.
Low-Input Resistance Current Amplifier
VDD
To decrease Rin below 1/gm
I1
requires the use of negative, iin
shunt feedback. Consider
M3
the following example.
VDD
I2
iout
iin
I3
-
+
vin
- gm1vgs1
M2
M1
i=0
VGG3
vgs3
rds1 +
gm3vgs3
rds3
+
vgs1
-
Fig. 5.4-5
Current Amplifier
Feedback concept:
Input resistance without feedback rds1.
gm1 gm3 Loop gain gds1gds3 assuming that the resistances of I1 and I3 are very large.
Rin(no fb.)
rds1
1
Rin = 1 + Loop gain gm1rds1gm3rds3 = gm1gm3rds3
Small signal analysis:
iin = gm1vgs1 - gds1vgs3
and vgs3 = -vin vgs1 = vin - (gm3 vgs3rds3) = vin(1+gm3rds3)
1
Rin gm1gm3rds3
iin = gm1(1+gm3rds3)vin + gds1vin gm1gm3rds3vin
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-9.
Differential-Input, Current Amplifiers
Definitions for the differential-mode, iID, and common-mode, iIC, input currents of the
differential-input current amplifier.
i1
iIC
2
iID
+
iO
i2 iIC
2
Fig. 5.4-6
iO = AIDiID ± AICiIC = AID(i1 - i2) ± A
1
IC
2
i +i
2
Implementations:
VDD
VDD
I
2I
i1
i2
i2
M1 M2
M3 M4
M3
VDD
VDD
M4
iO
I
iO
M1
i1
i1-i2
VGG1
M2
i2
M6
M5
VGG2
Fig. 5.4-7
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 4 (7/5/06)
Page 5.4-10.
Summary
• Current amplifiers have a low input resistance, high output resistance, and a defined
output-input current relationship
• Input resistances less than 1/gm require feedback
However, all feedback loops have internal poles that cause the benefits of negative
feedback to vanish at high frequencies.
In addition, these feedback loops can have a slow time constant from a pole-zero
pair.
• Voltage amplifiers using a current amplifier have high values of gain-bandwidth
• Current amplifiers are useful at low power supplies and for switched current
applications
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-1.
SECTION 5.5 - OUTPUT AMPLIFIERS
INTRODUCTION
General Considerations of Output Amplifiers
CMOS Analog Circuit Design
VDD
f1(vIN)
i1
f2(vIN)
Buffer
Class A
i2
vIN
iOUT
RL
+
vOUT
-
VSS
Current
i1
t
i2=IQ
iOUT
Class AB
Current
i1
iOUT
t
i2
Class B
i1
Current
Requirements:
1.) Provide sufficient output power in the form of
voltage or current.
2.) Avoid signal distortion.
3.) Be efficient
4.) Provide protection from abnormal conditions
(short circuit, over temperature, etc.)
Types of Output Amplifiers:
1.) Class A amplifiers
2.) Source followers
3.) Push-pull amplifiers
4.) Substrate BJT amplifiers
5.) Amplifiers using negative
shunt feedback
iOUT
t
i2
Fig. 5.5-005
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-2.
CLASS A AMPLIFIERS
Current source load inverter
A Class A circuit has
current flow in the MOSFETs
during the entire period of a
sinusoidal signal.
Characteristics of Class A
amplifiers:
• Unsymmetrical sinking and
sourcing
• Linear
• Poor efficiency
VDD
VGG2
IQ
VDD+|VSS|
RL
M2
iOUT
vOUT
iD
RL dominates
as the load line
IQ
iD1
vIN
RL
M1CL
VSS
IQRL
VSS
IQRL
vOUT
VDD
Fig. 5.5-1
vOUT(peak)2
vOUT(peak)2
2RL
(V
=
DD-VSS) VDD -VSS (VDD -VSS) 2RL Maximum efficiency occurs when vOUT(peak) = VDD = |VSS| which gives 25%.
vOUT(peak)2
2RL
PRL
Efficiency = PSupply = (VDD-VSS)IQ =
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-3.
Optimum Value of Load Resistor
Depending on the value of RL, the signal swing can be symmetrical or asymmetrical.
(This ignores the limitations of the transistor.)
iD1
Smaller RL
VDD+|VSS|
RL
Minimum RL for
maximum swing
IQ
0
VSS
CMOS Analog Circuit Design
IQRL
0
IQRL
Larger RL
vDS1
VDD Fig. 040-03
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-4.
Specifying the Performance of a Class A Amplifier
Output resistance:
1
1
rout = gds1+ gds2 = (1+2)ID
Current:
• Maximum sinking current is,
K'1W1
IOUT= 2L1 (VDD -VSS - VT1)2 - IQ
• Maximum sourcing current is,
K'2W2
+
IOUT = 2L2 (VDD - VGG2 - |VT2|)2 IQ
vOUT
Imax due to RL
Requirements:
Imax due to CL
• Want rout << RL
t
• |IOUT| > CL·SR
vOUT(peak)
• |IOUT| >
RL
Imax due to RL
070118-01
The maximum current is determined by both the current
required to provide the necessary slew rate (CL) and to provide a voltage across the load
resistor (RL).
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-5.
Small-Signal Performance of the Class A Amplifier
Although we have considered the small-signal performance of the Class A amplifier as
the current source load inverter, let us include the influence of the load.
The modified small-signal model:
C1
+
vin
gm1vin
rds1
rds2
-
RL
C2
+
vout
Fig. 5.5-2
The small-signal voltage gain is:
-gm1
vout
=
vin
gds1+gds2+GL
The small-signal frequency response includes:
A zero at
gm1
z = Cgd1
and a pole at
-(gds1+gds2+GL)
p = Cgd1+Cgd2+Cbd1+Cbd2+CL
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-6.
Example 5.5-1 - Design of a Simple Class-A Output Stage
Use Table 3.1-2 to design the W/L ratios of M1 and M2 so that a voltage swing of ±2V
and a slew rate of 1 V/μs is achieved if RL = 20 k and CL = 1000 pF. Assume VDD =
|VSS| = 3V and VGG2 = 0V. Let L = 2 μm and assume that Cgd1 = 100fF.
Solution
Let us first consider the effects of RL and CL.
iOUT(peak) = ±2V/20k = ±100μA
and
CL·SR = 10-9·106 = 1000μA
Since the slew rate current is so much larger than the current needed to meet the voltage
specification across RL, we can safely assume that all of the current supplied by the
inverter is available to charge CL.
Using a value of ±1 mA,
2(IOUT-+IQ)
W1
4000
3μm
=
L1 K ’(V +|V | -V )2 = 110·(5.3)2 2μm
N DD
SS
TN
and
2IOUT+
W2
2000
15μm
=
L2 = K ’(V -V
2μm
P DD GG2-|VTP|)2 50·(2.3)2
The small-signal performance is Av = -8.21 V/V (includes RL = 20k) and rout = 50k
The roots are, zero = gm1/Cgd1 .59GHz and pole = 1/[(RL||rout)CL)] -11.14kHz
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-7.
Broadband Harmonic Distortion
The linearity of an amplifier can be characterized by its influence on a pure sinusoidal
input signal.
Assume the input is,
Vin() = Vp sin(t)
The output of an amplifier with distortion will be
Vout() = a1Vp sin (t) + a2Vp sin (2t) +...+ anVp sin(nt)
Harmonic distortion (HD) for the ith harmonic can be defined as the ratio of the
magnitude of the ith harmonic to the magnitude of the fundamental.
For example, second-harmonic distortion would be given as
a2
HD2 = a1
Total harmonic distortion (THD) is defined as the square root of the ratio of the sum of
all of the second and higher harmonics to the magnitude of the first or fundamental
2
2
2
[a2 + a3 +...+ an]1/2
Thus, THD can be expressed as
THD =
a1
The distortion of the class A amplifier is good for small signals and becomes poor at
maximum output swings because of the nonlinearity of the voltage transfer curve for
large-signal swing
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-8.
Class-A Source Follower
N-Channel Source Follower
with current sink bias:
VDD
IQ
Voltage transfer curve:
vOUT
VDD
VDD-VON1
VDD
Triode
VDD-VGS1
vIN M1
VSS
M3
iOUT
M2
VSS
VSS
|VSS|+VON2+VGS1
VGS1
vOUT
VDD-VON1+VGS1
RL
Fig. 040-01
Maximum output voltage swings:
vOUT(min) VSS - VON2 (if RL is large)
vOUT(max) = VDD - VON1 (if vIN > VDD)
vIN
IQRL<|VSS|+VON2
Triode
or
or
|VSS|+VON2
|VSS|
Fig. 040-02
vOUT(min) -IQRL (if RL is small)
vOUT(max) VDD - VGS1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-9.
Output Voltage Swing of the Follower
The previous results do not include the bulk effect on VT1 of VGS1.
Therefore,
VT1 = VT01 + [ 2|F| -vBS- 2|F|] VT01+ vSB = VT01+1 vOUT(max)-VSS
vOUT(max)-VSS VDD-VSS-VON1-VT1 = VDD-VSS-VON1-VT01-1 vOUT(max)-VSS
Define vOUT(max)-VSS = vOUT’(max)
which gives the quadratic,
vOUT’(max)+1 vOUT’(max)-(VDD-VSS -VON1-VT01)=0
Solving the quadratic gives,
12 1
12+ 4(VDD-VSS-VON1-VT01)
2
vOUT’(max) 4 - 2 1 +4(VDD-VSS-VON1-VT01) +
4
If VDD = 2.5V, N = 0.4V1/2, VTN1= 0.7V, and VON1 = 0.2V, then vOUT’(max) = 3.661V
and
vOUT(max) = 3.661-2.5 = 0.8661V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-10.
Maximum Sourcing and Sinking Currents for the Source Follower
VDD
Maximum Sourcing Current (into a short circuit):
VDD
We assume that the transistors are in saturation and
vIN M1
IQ
VDD = -VSS = 2.5V , thus
K’1W1
IOUT(sourcing) = 2L1 [VDD vOUT VT1]2-IQ
VSS
M3
where vIN is assumed to be equal to VDD.
M2
VSS
VSS
iOUT
vOUT
RL
Fig. 040-01
If W1/L1 =10 and if vOUT = 0V, then
VT1 = 1.08V IOUT equal to 1.11 mA.
However, as vOUT increases above 0V, the current rapidly decreases.
Maximum Sinking Current:
For the current sink load, the sinking current is whatever the sink is biased to provide.
IOUT(sinking) = IQ
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-11.
Efficiency of the Source Follower
Assume that the source follower
input can swing to power supply.
Plotting
iD = 2 (vIN - vOUT - VT)2
vOUT
and
iD = IQ - RL
Efficiency =
vIN
VSS
-2VT -VT
0 VT 2VT
IQRL
VSS VSS-VT
iD
3VT 4VT
IQ
-3VT -2VT -VT
VT 2VT 3VT
I R = VSS
VDD Q L
vOUT
VDD-VT VDD
Fig. 040-035
vOUT(peak)2
vOUT(peak)2
2RL
(V
=
DD-VSS) VDD -VSS (VDD -VSS) 2RL Maximum efficiency occurs when vOUT(peak) = VDD = |VSS| which gives 25%.
Comments:
• Maximum efficiency occurs for the minimum value of RL which gives max. swing.
• Other values of RL result in less efficiency (and smaller signal swings before clipping)
• We have ignored the fact that the dynamic Q point cannot travel along the full length of
the load line because of minimum and maximum voltage limits.
vOUT(peak)2
2RL
PRL
=
PSupply (VDD-VSS)IQ =
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-12.
Small Signal Performance of the Source Follower
v
+ gs1 Small-signal model:
+
vin
C1
gm1vgs1
+
+
vin
-
vgs1
gmbs1vbs1
rds1
rds2
RL
rds1
rds2
C2
+
vout
-
-
C1
gm1vin
gm1vout
gmbs1vout
RL
C2
+
vout
-
Fig. 040-04
gm1
gm1RL
Vout
gm1
=
Vin gds1 + gds2 + gm1 + gmbs1+GL gm1 + gmbs1+GL 1 +gm1RL
If VDD = -VSS = 2.5V, Vout = 0V, W1/L1 = 10μm/1 μm, W2/L2 = 1μm/1 μm,
and ID = 500 μA, then
For the current sink load follower (RL = ):
Vout
Vout
=
0.869V/V,
if
the
bulk
effect
were
ignored,
then
Vin
Vin = 0.963V/V
For a finite load, RL = 1000:
Vout
Vin = 0.512V/V
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-13.
Small Signal Performance of the Source Follower - Continued
The output resistance is:
1
Rout = gm1 + gmbs1 + gds1 + gds2
For the current sink load follower:
Rout = 830
The frequency response of the source follower:
(gm1 + sC1)
Vout(s)
Vin(s) = gds1 + gds2 + gm1 + gmbs1 + GL + s(C1 + C2)
where
C1 = capacitances connected between the input and output CGS1
C2 = Cbs1 +Cbd2 +Cgd2(or Cgs2) + CL
gm1
gm1+GL
z = - C1
and
p - C1+C2
The presence of a LHP zero leads to the possibility that in most cases the pole and zero
will provide some degree of cancellation leading to a broadband response.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-14.
PUSH-PULL AMPLIFIERS
Push-Pull Source Follower
Can both sink and source
current and provide a slightly
lower output resistance.
VDD
VDD
M1
vIN
M6
VGG
VSS
iOUT
VBias
VDD
M5 M1
VSS
iOUT
VSS
vOUT
VBias
RL
Efficiency:
VDD
M2
Depends on how the
VSS
transistors are biased.
• Class B - one transistor has
current flow for only 180° of the sinusoid (half period)
VDD
M4 M2
vIN
VDD
vOUT
RL
M3
VSS
Fig. 060-01
VSS
vOUT(peak)2
2RL
PRL
vOUT(peak)
Efficiency = P
=
=
2 VDD -VSS
VDD
1 2vOUT(peak)
(VDD -VSS)2 RL
Maximum efficiency occurs when vOUT(peak) =VDD and is 78.5%
• Class AB - each transistor has current flow for more than 180° of the sinusoid.
Maximum efficiency is between 25% and 78.5%
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-15.
Illustration of Class B and Class AB Push-Pull, Source Follower
Output current and voltage characteristics of the push-pull, source follower (RL = 1k):
2V
vG1
1V
1mA
iD1
0mA
-1V
vG1
vG2
0V
0mA
vout
-1V
iD2
-2V
-1mA
-2
0
2
1
Vin(V)
Class B, push-pull, source follower
-1
1mA
iD1
1V
0V
vout
2V
vG2
iD2
-2V
-2
-1mA
0
2
1
Vin(V)
Class AB, push-pull, source follower
-1
Fig. 060-02
Comments:
• Note that vOUT cannot reach the extreme values of VDD and VSS
• IOUT+(max) and IOUT-(max) is always less than VDD/RL or VSS/RL
• For vOUT = 0V, there is quiescent current flowing in M1 and M2 for Class AB
• Note that there is significant distortion at vIN =0V for the Class B push-pull follower
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-16.
Small-Signal Performance of the Push-Pull Follower
Model:
vgs1
+
+
vin
gm1vgs1
+
+
vin
-
-
C1
vgs1
gmbs1vbs1
rds1
gm2vgs2 gmbs2vbs2
rds2
RL
C2
+
vout
-
-
C1
gm1vin
1
RL
g
gm1vout gmbs1vout rds1 gm2vin gm2vout m2gmbs2vout rds2
C2
+
vout
Fig. 060-03
gm1 + gm2
vout
=
vin gds1+gds2+gm1+gmbs1+gm2+gmbs2+GL
1
Rout = gds1+gds2+gm1+gmbs1+gm2+gmbs2
(does not include RL)
If VDD = -VSS = 2.5V, Vout = 0V, ID1 = ID2 = 500μA, and W/L = 20μm/2μm, Av = 0.787
(RL=) and Rout = 448.
A zero and pole are located at
-(gds1+gds2+gm1+gmbs1+gm2+gmbs2+GL)
-(gm1+gm2)
p
=
.
z=
C1
C1+C2
These roots will be high-frequency because the associated resistances are small.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-17.
Push-Pull, Common Source Amplifiers
Similar to the class A but can operate as class B providing higher efficiency.
VDD
M2
VTR2
iOUT
vIN
vOUT
VTR1
M1CL
VSS
RL
Fig. 060-04
Comments:
• The batteries VTR1 and VTR2 are necessary to control the bias current in M1 and M2.
• The efficiency is the same as the push-pull, source follower.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-18.
Practical Implementation of the Push-Pull, Common Source Amplifier – Method 1
VDD
M6
M5
VGG3
M1 M3
iOUT
vIN
vOUT
VGG4
M2 M4
M7
RL
CL
M8
VSS
Fig. 060-05
VGG3 and VGG4 can be used to bias this amplifier in class AB or class B operation.
Note, that the bias current in M6 and M8 is not dependent upon VDD or VSS (assuming
VGG3 and VGG4 are not dependent on VDD and VSS).
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-19.
Practical Implementation of the Push-Pull, Common Source Amplifier – Method 2
VDD
M5
I=2Ib
M7
Ib
vin+
M1
M3 M4
M8
M9
vin-
M2
M6
Ib
I=2Ib
VSS
M10
Fig. 060-055
In steady-state, the current through M5 and M6 is 2Ib. If W4/L4 = W9/L9 and W3/L3 =
W8/L8, then the currents in M1 and M2 can be determined by the following relationship:
W1/L1
W2/L2 I1 = I2 = Ib W7/L7 = Ib W10/L10
If vin+ goes low, M5 pulls the gates of M1 and M2 high. M4 shuts off causing all of the
current flowing through M5 (2Ib) to flow through M3 shutting off M1. The gate of M2 is
high allowing the buffer to strongly sink current. If vin- goes high, M6 pulls the gates of
M1 and M2 low. As before, this shuts off M2 and turns on M1 allowing strong sourcing.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-20.
Additional Methods of Biasing the Push-Pull Common-Source Amplifier
VDD
VDD
VDD -VT+VSat
IBias
VDD -VT+2VSat
VB2
vOUT
VB1
vOUT
vIN
VT+2VSat
050423-10
vIN
050423-08
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-21.
Illustration of Class B and Class AB Push-Pull, Inverting Amplifier
Output current and voltage characteristics of the push-pull, inverting amplifier (RL =
1k):
vG2
2V
iD1
1V
vG1
iD2
iD1
0V
iD2
-1V
vOUT
-2V
-2V
-1V
0V
1V
2V
vIN
Class B, push-pull, inverting amplifier.
2mA
2V
1mA
1V
0mA
0V
-1mA
-1V
-2mA
-2V
2mA
vG2
vG1
iD1
1mA
iD1
0mA
iD2
vOUT
iD2
-1mA
-2mA
-2V
-1V
0V
1V
2V
vIN
Class AB, push-pull, inverting amplifier. Fig.060-06
Comments:
• Note that there is significant distortion at vIN =0V for the Class B inverter
• Note that vOUT cannot reach the extreme values of VDD and VSS
• IOUT+(max) and IOUT-(max) is always less than VDD/RL or VSS/RL
• For vOUT = 0V, there is quiescent current flowing in M1 and M2 for Class AB
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-22.
BIPOLAR JUNCTION TRANSISTOR OUTPUT AMPLIFIERS
What about the use of BJTs?
VDD
VDD
M3
VDD
Q1
iB
M2
vout
vout
iB
Q1
M2
M3
CL
VSS
p-well CMOS
VSS
CL
VSS
n-well CMOS
Fig. 5.5-8A
Comments:
• Can use either substrate or lateral BJTs.
• Small-signal output resistance is 1/gm which can easily be less than 100.
• Unfortunately, only PNP or NPN BJTs are available but not both on a standard
CMOS technology.
• In order for the BJT to sink (or source) large currents, the base current, iB, must be
large. Providing large currents as the voltage gets to extreme values is difficult for
MOSFET circuits to accomplish.
• If one considers the MOSFET driver, the emitter can only pull to within vBE+VON of
the power supply rails. This value can be 1V or more.
We will consider the BJT as an output stage in more detail in Sec. 7.1.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-23.
USING NEGATIVE FEEDBACK TO REDUCE THE OUTPUT RESISTANCE
Concept
VDD
Error
Amplifier
vIN
-
Error
Amplifier
M2
+
iOUT
vOUT
+
CL
M1
VSS
RL
Fig. 060-07
rds1||rds2
Rout = 1+Loop Gain
Comments:
• Can achieve output resistances as low as 10.
• If the error amplifiers are not balanced, it is difficult to control the quiescent current in
M1 and M2
• Great linearity because of the strong feedback
• Can be efficient if operated in class B or class AB
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-24.
Simple Implementation of Neg., Shunt Feedback to Reduce the Output Resistance
VDD
M2
R1
R2
iOUT
vIN
vOUT
CL
M1
RL
VSS
Fig. 060-08
R1 gm1+gm2 Loop gain R1+R2
gds1+gds2+GL rds1||rds2
R1 gm1+gm2 1+R1+R2
gds1+gds2+GL
Let R1 = R2, RL = , IBias = 500μA, W1/L1 = 100μm/1μm and W2/L2 = 200μm/1μm.
Thus, gm1 = 3.316mS, gm2 = 3.162mS, rds1 = 50k and rds2 = 40k.
Rout =
Rout =
50k||40k
22.22k
3316+3162 = 1+0.5(143.9) = 304
1+0.5 25+20 (Rout = 5.42k if RL = 1k)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 5 (7/5/06)
Page 5.5-25.
Summary of Output Amplifiers
• The objectives are to provide output power in form of voltage and/or current.
• In addition, the output amplifier should be linear and be efficient.
• Low output resistance is required to provide power efficiently to a small load resistance.
• High source/sink currents are required to provide sufficient output voltage rate due to
large load capacitances.
• Types of output amplifiers considered:
Class A amplifier
Source follower
Class B and AB amplifier
Use of BJTs
Negative shunt feedback
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Section 6 (7/5/06)
Page 5.6-1.
SECTION 5.7 - SUMMARY
Summary of Chapter Topics
• Inverting Amplifiers
Class A (diode load and current sink/source load)
Class AB of B (push-pull)
• Differential Amplifiers
Need good common mode rejection
An excellent input stage for integrated circuit amplifiers
• Cascode Amplifiers
Useful for controlling the poles of an amplifier
• Current Amplifiers
Good for low power supplies
• Output Amplifiers
Minimize the output resistance
Maximize the current sinking/sourcing capability
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-1.
APPENDIX 5A – FREQUENCY RESPONSE BASICS
Complex Frequency (s) Analysis of Circuits
The frequency response of linear circuits can be analyzed using the complex frequency
variable s which avoids having to solve the circuit in the time domain and then transform
into the frequency domain.
Passive components in the s domain are:
1
ZR(s) = R
ZL(s) = sL
and
ZC(s) = sC
s-domain analysis uses the complex impedance of elements as if they were “resistors”.
C1
Example:
s-domain
A
+
V1 gmV1
−
R2
C2
+
V2
−
1/sC1
conversion +
V1(s)
− gmV1(s)
R2
+
1
V2(s)
sC2
−
060204-06
Sum currents flowing away from node A to get,
sC1(V2 – V1) + gmV1 + G2V2 + sC2V2 = 0
Solving for the voltage gain transfer function gives,
sC1/gm - 1 -sC1 + gm
V2(s)
T(s) = V1(s) = s(C1+ C2) + G2 = -gmR2 s(C1+ C2)R2 + 1
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-2.
Complex Frequency Plane
The complex frequency variable, s, is really a complex number and can be expressed as
s = + j
where = Re[s] and = Im[s].
Complex frequency plane:
jω
Positive Imaginary Axis
Negative Real Axis
Positive Real Axis
σ
Negative Imaginary Axis
060204-07
It is useful to plot the roots of the transfer function on the complex frequency plane.
For the previous T(s), the roots are:
The numerator root (zero) is s = z1 = +(gm/C1)
The denominator root (pole) is s = p1= -[1/R2(C1+ C2)]
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-3.
Frequency Response
Frequency response is the result when we replace the complex frequency variable s with
j. (This amounts to evaluating T(s) on the imaginary axis of the complex frequency
plane.)
The frequency response is characterized by the magnitude and phase of T(j).
Example:
a 0 + a 1s
Assume T(s) = b0 + b1s
s = j
a0 + a1j a0 + ja1
T(j) = b0 + b1j = b0 + j b1
Since T(j) is a complex number, we can express the magnitude and phase as,
|T(j)| =
a02 + (a1)2
b02 + ( b1)2
a1
b1
Arg[T(j)] = +tan-1 a0 - tan-1 b0 For the previous example, the magnitude and phase would be,
|T(j)| = gmR2
1 + (C1/gm)2
1 + [ R2(C1+C2)]2
Arg[T(j)] = -tan-1(C1/gm) - tan-1[ R2(C1+C2)]
CMOS Analog Circuit Design
Note: Because the zero is on
the positive real axis, the
phase due to the zero is
-tan-1( ) rather than +tan-1( ).
More about that later.
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-4.
Graphical Illustration of Magnitude and Phase
The important concepts of frequency response are communicated through the graphical
portrayal of the magnitude and phase.
Consider our example,
s/z1 - 1 V2(s)
sC1/gm - 1 T(s) = V1(s) = -gmR2 s(C1+ C2)R2 + 1 = -T(0) s/p1- 1
where T(0) = gmR2, z1 = +(gm/C1) and p1= -[1/R2(C1+ C2)].
Replacing s with j gives [remember tan-1(-x) = - tan-1(x)],
1 + (/z1)2
Arg[T(j)] = -tan-1(/z1) - tan-1[/p2]
|T(j)| = T(0) 1 + ( /p )2 and
2
Graphically, we get the following if we assume |p1| = 0.1|z1|,
0°
0.8
0.707
0.6
0.4
0.2
0.707 frequency
0.0
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0
060205-01
Normalized Frequency (ω/|p1|)
Phase Shift (Degrees)
Normalized Magnitude
|T(jω)|/T(0)
1.0
-20°
-40°
-60°
-80°
-100°
-120°
-140°
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0
Normalized Frequency (ω/|p1|)
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-5.
0 dB
-3 dB
-5 dB
Slope =
-20dB/decade
-10 dB
-15 dB -3dB frequency
-20 dB
0.01
060205-02
0.1
1.0
10.0
100
1000
Log Normalized Frequency (ω/|p1|)
0°
Phase Shift (Degrees)
Normalized Magnitude
20log10[|T(jω)|/T(0)]
Graphical Illustration of Frequency Response – Continued
If the frequency range is large, it is more useful to use a logarithmic scale for the
frequency. In addition, if one expresses the magnitude as 20 log10(|T(j)|, the plots can
be closely approximated with straight lines which enables quick analysis by hand. Such
plots are called Bode plots.
-30°
-60°
-90°
-120°
-150°
-180°
0.01
0.1
1.0
10.0
100
1000
Log Normalized Frequency (ω/|p1|)
To construct a Bode asymptotic magnitude plot for a low pass transfer function in the
form of products of roots:
1.) Start at a low frequency and plot 20 log10(|T(0)| until you reach the smallest root.
2.) At the frequency equal to magnitude of the smallest root, change to a line with a slope
of +20dB/decade if the root is a zero or -20dB/decade if the root is a pole.
3.) Continue increasing in frequency until you have plotted the influence of all roots.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-6.
The Influence of the Complex Frequency Plane on Frequency Response
The root locations in the complex frequency plane have a direct influence on the
frequency response as illustrated below. Consider the transfer function:
s/z1 - 1 s-z1 s-z1 |p1|
T(s) = -T(0) s/p1- 1 = - z1 T(0) s-p1 = - 0.1T(0) s-p1 where z1 = 10|p1|
jω
|T(jω)|/T(0)
j10
1.0
0.8
j10-p1
j8-p1
j8
0.6
j10-z1
0.4
j8-z1
j6
0.2
j6-z1
j6-p1
j4
0.0
j4-z1
j4-p1
j0-p1
1
2
3
4
5
6
7
8
ω
9 10
j2-z1
j0-z1
j2
j2-p1
0
j0
σ
p1=-1
060205-04
z1=10
Note: The roots maximally influence the magnitude when is such that the angle
between the vector and the horizontal axis is 45°. This occurs at j1 for p1 and j10 for z1.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-7.
Bandwidth of a Low-Pass Amplifier
One of the most important aspects of frequency analysis is to find the frequency at which
the amplitude decreases by -3dB or 1/ 2. This can easily be found from the magnitude
the frequency response.
|A(jω)|
+
Α
+
V1(jω)
V2(jω)
−
−
A(0)
0.707A(0)
Bandwidth
0
0
ωA=0.707
ω
060205-03
Amplifier with a Dominant Root:
Since the amplifier is low-pass, the poles will be smaller in magnitude than the zeros.
If one of the poles is approximately 4-5 times smaller than the next smallest pole, the
bandwidth of the amplifier is given as
Bandwidth |Smallest pole|
Amplifier with no Dominant Root:
If there are several poles with roughly the same magnitude, then one should use the
graphical method above to find the bandwidth.
CMOS Analog Circuit Design
© P.E. Allen - 2006
Chapter 5 – Appendix 5A (7/5/06)
Page 5.7-8.
Example of Finding the Bandwidth of an Amplifier
Suppose an amplifier has a pole at -10 rads/sec and another at -20 rads/sec. and a zero at
+50 radians/sec. Find the bandwidth of this amplifier if the low frequency gain is 100.
Solution
Since the poles are close together, construct a Bode plot and graphically find the
bandwidth.
dB
3dB
40
34
30
-3dB
20 Bandwidth
10
6
0
1 2
10 20
-6dB/octave
-12dB/octave
-6dB/octave
100 200
1000
Frequency (Rad/sec)
060205-05
From the graph, we see that the -3dB bandwidth is close to 11-12 Rad/sec.
CMOS Analog Circuit Design
© P.E. Allen - 2006