Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Brushed DC electric motor wikipedia , lookup
Stepper motor wikipedia , lookup
Distribution management system wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Wassim Michael Haddad wikipedia , lookup
PID controller wikipedia , lookup
Distributed control system wikipedia , lookup
Resilient control systems wikipedia , lookup
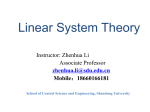
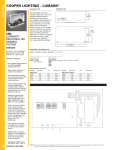
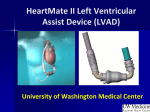
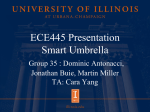
c 2005 Institute for Scientific ° Computing and Information INTERNATIONAL JOURNAL OF INFORMATION AND SYSTEMS SCIENCES Volume 1, Number 3-4, Pages 283–292 SIMULATION AND EXPERIMENT OF DRIVING CONTROL SYSTEM FOR ELECTRIC VEHICLE CHUANWEI ZHANG, ZHIFENG BAI, BINGGANG CAO, AND JIARANG LIN Abstract. This paper discusses different driving control methods of electric vehicle (EV), and presents a new H∞ robust driving control strategy for an EV. Our research work is done under different conditions, namely, variable battery voltage and variable load rotational inertia separately. A comparison between conventional PID control method and H∞ robust control method is made when they are applied to the above mentioned conditions. Under the driving conditions, simulations and experimental results both indicate that PID controller and H∞ robust controller give good results. However, the H∞ robust controller gives a faster response and a better stability. Furthermore, H∞ robust control follows the given current faster and more smoothly than by PID control and improve the drive range of EVs, especially for the vehicle in urban areas. Key Words. electric vehicle, drive range, H∞ robust control, permanent magnet DC motor, PID control. 1. Introduction Under the pressure of environmental protection and the dwindling of petroleum resources, the development of electric vehicles (Evs) are becoming more and more necessary all over the world. Evs are playing an important role in solving those problems, which are caused by internal combustion engine vehicles (ICEVs). From the viewpoint of electric and control engineering, EV has some advantages over ICEV. For example, its torque generation is very quick and accurate, its output torque is easily comprehensible, and its motor can be distributed to several wheels. The special requirements for EV include wide speed range, good torque-speed characteristics, high efficiency and so on [1, 2]. In recent years, based on these characteristics, several researchers have investigated the use of PID, fuzzy, and adaptive control techniques for the driving control of EV [3–8]. We consider driving control system for EV with possible multiple sources of uncertainties, noises, and disturbances. While being driven, the load rotational inertia of a vehicle will be greatly change, battery voltage will be reduced, for example, from more than one hundred volts to several tens of volts within an experimental period. The tasks of the controller are to stabilize the system and to minimize the error between charging current and its reference, in spite of the large perturbations in load rotational inertia and terminal voltage of the battery in all kinds of driving cycle. Using the above-mentioned methods to design the controller can’t satisfy the requirement of both steady-state tracking error or response speed of EV driving Received by the editors June 15, 2004 and, in revised form, January 22, 2005. This research was supported by Science and Technology Bureau of Shannxi Province and 211 Project sponsored by Xi’an Jiaotong University. 283 284 C. W. ZHANG, Z. F. BAI, B. G. CAO, AND J. R. LIN control. But a good controller is one that can achieve effective disturbance rejection with low energy consumption and high performance requirement. This naturally leads to the definition of a control problem in the framework of H∞ theory that will be used in this paper to design a driving controller for EV. The H∞ robust controller has better performance than the above-mentioned controllers in both steady-state tracking error and response speed. Simulations and experimental results both indicate that H∞ robust control has better control performance than PID control and can extend the drive range of EV, especially for the vehicle in urban areas. H∞ control theory has been used in practically controlled plants since the early 1980s, and has been used more recently as a control option in the area of power electronics, and especially in motor control. The suboptimal solution of the standard problem can be found via the description of the linear system in state space and the solution of two algebraic Riccati equations, for which reliable programs are available in MATLAB. The paper can be divided into five sections: Section 1 is an introduction. Section 2 describes the model of permanent magnet DC motor. Simulation results are given in section 3. Experimental results are given and analyzed in Section 4. Section 5 concludes this paper. 2. Mathematical model The EV’s driving control system in this paper is comprised of (i) battery bank (energy source), (ii) DC-to-DC power converter using IGBT to control the power into and out of the battery bank, (iii) permanent magnet DC motor, and (iv) DSP controller. Figure 1 shows the motor driving control system for EV. The upper IGBT is in charge of switching while the lower one is always off when it drives the EV. The driver of EV gives his command by stepping on the pedals. Then the control system receives the input signal gathered from the pedal and changes it to a PWM signal. Figure 1. Motor Driving Control System The steady-state voltage equation of permanent magnet DC motor stator is expressed as follows [9]: (1) U = E + R · ia + L · dia , dt SIMULATION AND EXPERIMENT OF DRIVING CONTROL SYSTEM (2) 285 E = Ke · ω. Mechanical movement equation and electromagnetic torque equation can respectively be expressed as: (3) T = TL + J · (4) dω , dt T = Kt · ia . Where, U represents armature volt age ; ia represents armature current; R represents armature resistance ; L represents armature inductance; E represents induced voltage of motor ; ω represents mechanical angular velocity; Ke , Kt represent electromotive force coefficient and torque constant, respectively; T, TL represent electromagnetic torque and load torque,respectively; J represents equivalent moment of inertia. From (1), (2), (3) and (4), the control objective I(s) can be expressed as equation (5). Figure 2 shows the diagram of transfer function for EV control system. (5) I(s) = Ub (s)Js + Ke TL − Ke ω0 Js . JLs2 + JRs + Ke Kt Figure 2. Transfer Function for EV Control System In Figure 2, P(s) is the DC motor model; K(s) is the controller;WT (s),Wω (s) and P(s) are defined as follows: (6) WT (s) = Ke Wω (s) = Ke Js P (s) = 1 JLs2 +JRs+Ke Kt 286 C. W. ZHANG, Z. F. BAI, B. G. CAO, AND J. R. LIN 3. Simulation studies A large number of control problems of practical importance can be reduced to the standard robust performance analysis framework illustrated in Figure 3. In this paper, depending on the system model and practical parametric uncertainty, we shall modify the standard robust control problem in Figure 3 into the H∞ robust control problem with weights in Figure 4. Figure 3. A Standard Robust Control Problem Figure 4. Block Diagram of H∞ control with weights In Figure 4, P(s) is the power stage of driving control, and G(s) is the augmented plant. K(s) is the controller to be designed. The closed-loop transfer function matrix between iref and z is defined as Tzw . The goal is to minimize the infinite norm of Tzw : (7) kTzw k∞ < γ. Where, kk∞ represents the infinite norm and γ can correspond to an optimal (γ = 1) or suboptimal case ( 0 < γ < 1). The stable function We describes the difference between the response of the plant and its reference value, and limits the maximum value of the error caused by SIMULATION AND EXPERIMENT OF DRIVING CONTROL SYSTEM 287 perturbations. ¯W¯u is used to shape ¯the ¯ penalty on control signal, and imposes an ¯ ¯ ¯ ¯ upper limit to ¯d˜¯ to guarantee 0 < ¯d˜¯ < 1. The significance of the low frequency response can be emphasized by multiplying the plant by a stable weighting function WT . According to [10], the weighting functions We and WT can be defined as follows: µ (8) We = µ (9) WT = √ ¶k1 s/ k1 Ms + ωb √ , s + ωb k1 ε √ ¶k2 s + ωbc / k2 MT . √ k2 ε s + ω 1 bc Where, MS , MT is Peak sensitivity of closed-loop transfer function and controller, respectively; ωb , ωbc is the closed-loop and controller bandwidth, respectively; for some integer k1 ≥ 1, k2 ≥ 1. The weighting functions chosen in this study were: We = 0.1s+100 s+0.01 Wu = 0.5 WT = s+50 500 (10) MATLAB was used to compute the H∞ controller and to ensure that the closedloop system is asymptotically stable and satisfies the following: kTzw k∞ < γW −1 , where, © ª W = We Wu WT . After model reduction, the approximate controller is: 0.053s2 + 7.672s + 11.986 . s3 + 324.037s2 + 3.705s + 0.005 Hence, for practical purposes, the weighting functions are chosen to reflect the design objectives and knowledge of the disturbances and sensor noise.On the other hand, one can usually choose suitable ε and ε1 to satisfy the performance specifications. Here, we choose ε = 0.0001 and ε1 = 0. Based on the control objective of driving control of EV, in this simulation, PID control method and H∞ control method are used. Figure 5 shows the block diagram of PID control system. Parameters for the prototype of the permanent magnetic DC motor are shown in Table 1. In the simulations, a sinusoidal load torque is used to evaluate the tracking capability of the proposed controller. (11) K(s) = Figure 5. Block Diagram of PID Control 288 C. W. ZHANG, Z. F. BAI, B. G. CAO, AND J. R. LIN Table 1. Parameters Of The Permanent Magnetic DC Motor Rated Voltage Rated Output Rated Speed Rated Torque Induced Voltage Constant Ke Torque Constant Kt Armature Inductance L Armature Resistance R 120 (V) 20 (Kw) 2800 (rpm) 72N·m 0.0421 (Vs/r) 0.4 (N·m/A) 0.128 (mH) 0.0184 (Ω) However, the drive performance depends largely on the system parameters and exterior disturbances. The H∞ robust controller takes into consideration such parameter variations as the voltage of battery Ub , the load torque TL and the transmission ratio i of gearbox. Simulation results are shown in Figure 6. Figure 6. Simulation of Driving Control for EV From the simulation results as shown in Figure 6(a)-(d), we find out that the change of battery voltage has a smaller effect on control performance than the change of transmission ratio. In fact, the battery voltage has a small change when the EV runs normally. Moreover, the simulation results indicate that the error of H∞ control, under different conditions, is smaller than that of the PID control. In this case, the H∞ controller can be used to efficiently diminish the effects resulted from plant uncertainties and external disturbances. It is clear that the control performance of the proposed H∞ controller is much better than that of the PID controller. SIMULATION AND EXPERIMENT OF DRIVING CONTROL SYSTEM 289 4. Experimental results Experiments of driving control of EV were carried out on dry asphalt road in this paper with our experimental EV, ”XJTUEV-I”. The configuration of this vehicle is depicted in Figure 7. Figure 8 shows the experimental results of PID control. Compared with the simulation results, this remarkable performance of torque control is based on the precise current control technique, which control the motor to follow its reference value accurately, with quite short time constant and much less dead time. As the figures show, PID controller can reach the requirements of practical applications when the system disturbance is not too large. However, it is very difficult to identify the precise model of driving control. In general, we tune the parameters of PID under some certain conditions. Figure 7. XJTUEV-1 of Xi’an Jiaotong University From the experimental results shown in Figure 8 and Figure 9, we find that the actual driving current will decrease rapidly (about 2-3s) if the transmission ratio of the gearbox is 3.429( i.e. the largest gearbox ratio of the experiment vehicle). In this case, the actual driving current is up to the load torque because the vehicle reaches the highest speed at this ratio. But when the transmission ratio is 1, the accelerated time is longer than the given measure time of experiment. In this case, the actual driving current depends upon the given current. Experimental results of H∞ control are given in Figure 9. Compared with the simulation results, these experimental results show the effectiveness of the proposed H∞ control method. Furthermore, the tracking error is very small, as seen from the experimental results. Comparing Figure 8 to Figure 9, we see the performance of H∞ control is obviously better and the steady state error is also smaller than PID control, under the large parameter variations and external disturbances conditions. The experimental result of drive range is given in Figure 10. Based on the requirements of battery performance, the test was continued up to the complete discharge of the battery, i.e., up to when the vehicle was unable to move because of the intervention of internal protection of the driving control system (i.e., the open circuit voltage per battery isn’t less than 9 [v], we set 11[v]). From the experimental 290 C. W. ZHANG, Z. F. BAI, B. G. CAO, AND J. R. LIN Figure 8. Experimental Results of PID Control Figure 9. Experimental Results of H∞ Control SIMULATION AND EXPERIMENT OF DRIVING CONTROL SYSTEM 291 result we find that the drive range is longer for H∞ robust control than for PID control, i.e., the efficiency of propulsion motor is increased. Figure 10. Experimental Result of Drive Range 5. Conclusion In this paper, we present a H∞ robust controller for EV actuated by permanent magnet DC motor. Simulation and experimental results confirm that the performance of the proposed controller is quite robust and insensitive to system parameters and load changes. H∞ control algorithm is employed to efficiently attenuate the effects on the tracking error due to external disturbance. Furthermore, the proposed controller is employed to improve the driving range of EV. The proposed control algorithm can also be applied to other types of driving control of EV.In conclusion, the battery monitoring system is necessary for driving control of EVs, and its development will be part of our future research. Acknowledgments The author thanks Cao Binggang and Bai Zhifeng whose work largely constitutes this paper. This research was supported by 211 Project sponsored by Xi’an Jiaotong University. References [1] Chan, C.C., The State of the Art of Electric and Hybrid Vehicles, Proc. of IEEE, Vol.90, pp.245-275, 2002. [2] Sakai, S. and Hori, Y., Advanced Vehicle Motion Control of Eelectric Vehicle Based on the Fast Motor Torque Response, Proc. of 5th International Symposium on Advanced Vehicle Control, Michigan, USA, pp.729-736, 2000. [3] Khatun, P., Bingham, C.M, Schofield, N. and Mellor, P.H., Application of Fuzzy Control Algorithms for Electric Vehicle Antilock Braking/Traction Control Systems, IEEE Transactions on Vehicular Technology, Vol. 52, Issue: 5, pp.1356-1364, 2003. 292 C. W. ZHANG, Z. F. BAI, B. G. CAO, AND J. R. LIN [4] Delprat, S., Guerra, T.M. and Rimaux, J., Control Strategies for Hybrid Vehicles: Optimal Control, Proc. of 56th IEEE Vehicular Technology Conference, Vol.3, pp.1681-1685, 2002. [5] Faiz, J., Sharifian, M.B.B., Keyhani, A. and Proca, A.B., Sensorless Direct Torque Control of Induction Motors Used in Electric Vehicle, IEEE Transactions on Energy Conversion, Vol.18, Issue: 1, pp.1-10, 2003. [6] Saeks, R., Cox, C.J., Neidhoefer, J., Mays, P.R. and Murray, J.J., A daptive Control of a Hybrid Electric Vehicle, IEEE Transactions on Intelligent Transportation Systems, Vol.3, Issue: 4, pp.213-234, 2002. [7] Wang, D.Z. and Gu, S.S, Control Strategy and Identification of Hybrid Electric Vehicle Using Artificial Neural Networks, Proc. of International Conference on Control and Automation, pp.187-188, 2002. [8] Bo, Y.W., Zhu, D.Q. and Jiang, X.J., Performance Optimization Control of the Fuel Cells Electric Vehicle Driving System, Proc. of International Conference on Power System Technology, Vol.1, pp.149-152, 2002. [9] Chee-munong. Dynamic simulation of electric machinery. New Jersey: Prentice-Hall, 1997. [10] Zhou K and Doyle J. Essentials of robust control. New York: Prentice-Hall, 1998. School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an, 710049, China E-mail: ev− [email protected] URL: http://www.xjtu.edu.cn/ School of Mechanical Engineering, Xi’an University of Science and Technology, Xi’an, 710054, China E-mail: [email protected] URL: http://www.xust.edu.cn/