Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Universidade de Lisboa
Faculdade de Ciências
Departamento de Matemática
Complex positive definiteness,
including characteristic and moment
generating functions
Alexandra Symeonides
Dissertação
Mestrado em Matemática
2013
Universidade de Lisboa
Faculdade de Ciências
Departamento de Matemática
Complex positive definiteness,
including characteristic and moment
generating functions
Alexandra Symeonides
Dissertação
Mestrado em Matemática
Orientador: Professor Doutor Jorge Buescu
2013
Resumo
A partir do inı́cio do século passado, as funções definidas positivas foram objecto de estudos em muitas e diferentes áreas da matemática como teoria da
probabilidade, teoria dos operadores, análise de Fourier etc. Foi por causa
disto que notações e generalizações das funções definidas positivas provenientes das diversas áreas nunca foram reunidas numa única doutrina. O
propósito desta tese, é estudar com maior detalhe funções definidas positivas
de variável complexa em domı́nios particulares do plano complexo.
No Capı́tulo 1, daremos a definição de função definida positiva, algumas propriedades básicas, o teorema de representação de Bochner e também
algumas propriedades diferenciais destas funções. Em particular, vamos considerar o caso de função definida positiva e analı́tica sobre o eixo real e vamos
ver, como neste caso, é possı́vel estender a função ao plano complexo, assim
generalizando o conceito de função definida positiva no caso de função de
variavel complexa. É a partir deste resultado devido a Z. Sasvari, see [2],
que J. Buescu e A. C. Paixão deram a primeira definição de função definida
positiva de variável complexa, sem requerer nenhuma ulterior regularidade
sobre a função. Veremos, como muitas das propriedas básicas e diferenciais
de funções definidas positivas reais são válidas também no caso complexo
com generalizações oportunas. Além disso, J. Buescu e A. C. Paixão caracterizaram os conjuntos do plano complexo onde a definição de função definida
positiva está bem dada, e chamaram a estes conjuntos codifference sets. Enfim, neste Capı́tulo 1, vamos apresentar também o conceito de função real
co-definida positiva e vamos estudar relações e analogias desta função com
as de uma função definida positiva clássica. Por exemplo, enunciaremos o
análogo do teorema de Bochner, o teorema de Widder, que garante a existência de uma representação integral para funções co-definidas positivas.
No Capı́tulo 2, vamos estudar funções definidas positivas, mas a partir de um ponto de vista da teoria da probabilidade. De facto, a notação
probabilı́stica revela-se particularmente útil quando se trabalha com representações integrais de funções definidas positivas, sejam de variável real ou
de variável complexa. Os teoremas de representação de Bochner e de Widder
i
para funções respectivamente definidas e co-definidas positivas explicitam a
relação destas funções com a bem conhecida ferramenta da teoria da probabilidade, ou seja funções caracterı́sticas, funções geradoras dos momentos e
problema dos momentos. Portanto, iremos estudar estas funções na óptica
do nosso interesse acerca das funções definidas positivas, logo não iremos
fornecer uma clássica revisão desta ferramenta, que de facto pode ser encontrada em qualquer manual de teoria da probabilidade. Referimos por
exemplo os livros de J. S. Rosenthal [13] e de R. Ash [1].
Enfim, no Capı́tulo 3, vamos concentrar-nos sobre funções definidas positivas de variável complexa em faixas do plano complexo. De facto, veremos
como as faixas parecem ser os únicos conjuntos onde faz sentido considerar
uma função definida positiva que possui um mı́nimo de regularidade. Provar
isto, foi um dos propósitos, indirectos, desta tese. De facto, os resultados
desta tese sugerem e não refutam, mas ainda não provam, a suposição precedente. Daremos condições sobre funções complexas definidas positivas em
faixas para garantir a existência e eventualmente a unicidade de uma represetação integral. Observaremos, que a existência ou não desta representação
depende da regularidade da função e que a regularidade da função em toda
a faixa è dominada pela regularidade da função sobre o intervalo do eixo
imaginário que intersecta a faixa considerada. Em particular, iremos provar
que uma função complexa definida positiva numa faixa que seja pelo menos
contı́nua no intervalo do eixo imaginário que intersecta a faixa é de facto
uma função analı́tica em toda a faixa. Também, demonstraremos que uma
função analı́tica definida positiva numa faixa do plano complexo possui uma
única representação integral. Além disso, daremos uma generalização no caso
complexo do problema de extensão para funções definidas positivas. Veremos
como, dada uma função definida positiva num codifference set qualquer, nas
componentes conexas do codifference set que intersectam o eixo imaginário
é possı́vel, comforme a regularidade da função, extender a função e a propriedade de ser definida positiva, a todas as faixas horizontais que contém
as componentes conexas do codifference set original. Infelizmente, veremos
também como este conjunto de resultados resolve só parcialmente a questão
de estabelecer as faixas como codifference sets por excelência.
Palavras-chave Funções definidas positivas, Análise complexa, Funções
caracterı́sticas e outras transformadas.
Mathematics Subject Classification (2010) Primário 42A82; Secundário 30A10,
60E10.
ii
Abstract
In Chapter 1, we will give the definition of positive definite functions on R
and we will present some basic and differential properties of these functions.
In particular, we will consider the case of analytic positive definite functions
on R in order to construct continuations to the complex plane. In view
of this, we will present the definition of complex-variable positive definite
function mainly due to J. Buescu and A. Paixão and we will see how several
of the differential properties valide in the real case can be generalized in the
complex settings. Moreover, is given here the notion of codifference set as the
set of the complex plane in which the definition of complex positive definite
function is well-given. In Chapter 1, we will also introduce another similar
property to positive definiteness, namely co-positive definiteness.
In Chapter 2, we will look at the concept of positive definite function
from a probabilistic point of view. In order to do that, we will recall the
notion of characteristic function and moment generating function and we will
show how, thanks to Bochner’s and Widder’s representation theorems, these
objects respectively correspond to positive definite and co-positive definite
functions. Furthermore, we will present the so-called moment problem.
In Chapter 3 we will focus on complex-variable positive definite functions
on strips of the complex plane. We tried to understand under which conditions a complex positive definite function on a strip benefits of an integral
representation and eventually when it is unique. We found out that the
existence or not of such a representation depends on the regularity of the
function; and that the regularity of a complex positive definite function on a
strip is completely imposed by the regularity of the function on the interval
of the imaginary axis contained in the strip. Moreover, we will state a generalization of the extension problem for complex positive definite function.
Keywords Positive definite functions, Complex analysis, Characteristic functions and other transforms.
Mathematics Subject Classification (2010) Primary 42A82; Secondary 30A10,
60E10.
iii
Acknowledgements
I would like to thank my advisor Jorge Buescu and the Professor Antonio
Carlos Paixão that to all effects is co-advisor of this thesis. I want to thank
them for all the time spent speculating about complex positive definite functions, for the devotion to their and to this work. I really enjoyed to do my
Master thesis and I simply couldn’t do it without their support.
Thanks to Sérgio for his encouragements. Thanks to all the friends of Rua
da Saudade. Grazie a mamma e papà, e a Sara, sempre tanto vicini.
iv
Contents
Resumo
i
Abstract
ii
1 Introduction
1
2 Positive definite functions
2.1 Real-variable positive definite functions . . . . . . . . .
2.1.1 Co-positive definite functions . . . . . . . . . .
2.2 Complex-variable positive definite functions . . . . . .
2.2.1 Codifference sets . . . . . . . . . . . . . . . . .
2.2.2 Properties of complex positive definite functions
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
. 5
. 8
. 9
. 10
. 12
3 Characteristic functions
3.1 Moment generating functions . . . . . . . . . . . . . . . . . .
3.2 Moment problem . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Hamburger moment problem . . . . . . . . . . . . . . .
23
29
32
32
4 Complex positive definite functions on strips
4.1 Propagation of regularity . . . . . . . . . . . . . . . . . . . . .
4.2 Integral representations . . . . . . . . . . . . . . . . . . . . . .
4.3 The extension problem . . . . . . . . . . . . . . . . . . . . . .
37
37
40
45
5 Bibliography
49
v
Chapter 1
Introduction
The concept of positive definiteness appears for the first time in 1907 in a
paper of the mathematician Carathéodory. He was looking for necessary and
sufficient conditions on the coefficients of the power series
∞
X
(ak + ibk )z k
1+
k=1
analytic on the unit disc in order to have positive real part. Carathéodory
characterized these point, (a1 , b1 , . . . , an , bn ) for n ∈ N, as the points that lie
in the smallest convex set containing the points
2(cos ϕ, sin ϕ, . . . , cos nϕ, sin nϕ),
with 0 ≤ ϕ ≤ 2π.
In 1911 Toepliz noticed that Carathéodory’s condition is equivalent to
n
X
dk−l ck c̄l ≥ 0,
∀ n ∈ N, ∀ {ck }nk=1 ∈ C
(1.1)
k,l=1
where d0 = 2, dk = ak − ibk , d−k = d¯k . That is, if and only if dk is a positive
definite sequence. In the same year, thanks to Toepliz’s deduction, Herglotz
solved the so-called trigonometric moment problem. Indeed, he stated that a
sequence {dn } satisfies (1.1) if and only if there exists a unique non-negative
and finite Borel measure µ such that
Z 2π
dn =
eint dµ(t),
n ∈ Z.
0
That is, such that dn is a solution of the trigonometric moment problem.
1
In 1923 Mathias introduced the notion of positive definite function. A
function f : R → C is positive definite if
f (−x) = f (x),
and
m
X
x∈R
ξj ξ k f (xj − xk ) ≥ 0
(1.2)
(1.3)
j,k=1
m
for all m ∈ N, {ξk }m
k=1 ⊂ C and {xk }k=1 ⊂ R. That is, if every square
m
matrix [f (xj − xk )]j,k=1 is positive semi-definite. Remark that, condition
(1.2) remained part of the definition of a positive definite function until 1933,
when F. Riesz pointed out that it follows easily from (1.3).
In 1932 Bochner proved a celebrated theorem on positive definite functions: if f is a continuous positive definite function on R, then there exists a
bounded non-decreasing function µ on R such that f is the Fourier-Stieltjes
transform of µ, that is
Z
+∞
eitx dµ(t)
f (x) =
−∞
holds for all x.
Positive definite functions have a lot of generalizations, as for example,
positive definite kernels that in the context of reproducing kernel Hilbert
spaces have several applications to the theory of integral equations. Actually,
positive definite kernels were introduced by Mercer in 1909, that is before
positive definite functions. We call k a positive definite kernel if k(x, y) is
any complex-valued function on R2 such that
n
X
k(xi , xj )ξi ξ j ≥ 0.
i,j=1
for all ξi ∈ C and (xi , xj ) ∈ R2 and for i, j = 1, . . . , n.
This is only one of the numerous applications of positive definite functions. After Bochner stated his theorem, Riesz pointed out that it could
be used to prove an important theorem on one-parameter groups of unitary
operators, namely Stone Theorem; and with the appearance of harmonic
analysis on groups in 1940’s the role of positive definite functions in Fourier
analysis became apparent.
Perhaps the area of mathematics in which most people are familiar with
positive definite function is that of probability theory. In fact, the FourierStieltjes transform of a probability distribution is called a characteristic function, and thus, by virtue of Bochner’s theorem, f is a characteristic function
2
if and only if f is continuous, positive definite and f (0) = 1. Even if characteristic functions hail as far as Laplace and Cauchy, it was Lévy who first
recognized that in general it is easier to work with characteristic functions
instead of probability distributions. It is not surprising that the central limit
problem (the problem of convergence of sums of laws of probability) was in
fact solved with the aid of positive definite functions.
It is because of the concept of positive definite function being such a
central notion in so many different theories that it never had been unified in
a unique doctrine; and that still today there is a big disparity between the
notations from distinct mathematical areas.
In Chapter 1, after recalling the definition of positive definite functions
on R, we will present some basic properties and some differential properties
of these functions. In particular, we will consider the case of analytic positive
definite functions on R in order to construct continuations to the complex
plane, see Sasvari [2], and thus, in order to extend the condition of positive
definiteness to analytic functions of the complex variable. In view of this,
we will present the a priori definition, that is requiring no further regularity
on the function, of complex-variable positive definite function mainly due J.
Buescu and A. Paixão, see [10] and we will see how several of the differential
properties valid in the real case can be generalized in the complex settings.
Also is given here the notion of codifference set, also due to J. Buescu and
A. Paixão, see [10], as the set of the complex plane in which the definition
of complex positive definite function is well-given. In Chapter 1, we will also
introduce another property very similar to positive definiteness, namely copositive definiteness, and we will show that even for such functions exists a
representation theorem of 1933 due to Widder, see [18].
In Chapter 2, we will look at the concept of positive definite function from
a probabilistic point of view, since the notation of the probability theory resulted pretty useful when dealing with integral representations of positive
definite functions both of real or complex variable. In order to do that,
we will recall the notion of characteristic function and moment generating
function and we will show how, thanks to Bochner’s and Widder’s representation theorems, these objects respectively correspond to positive definite
and co-positive definite functions. However, we will explore these tools in
the perspective of what we are interested in, thus we will not offer a common
exposition of characteristic and moment generating functions as can be found
in any manual of probability theory, see for example J. S. Rosenthal [13] and
R. Ash [1]. Furthermore, we will present the so-called moment problem in
order to show its relations with positive definite functions.
Finally, in Chapter 3 we will focus on complex-variable positive definite
functions on strips of the complex plane. In fact, our interest is particularly
3
focused on this kind of codifference sets, since at a first sight they seems
to be the only sets in which it makes sense to consider a complex positive
definite function. To prove this was one of the purposes, an indirect one,
of this thesis. Indeed, we tried to understand under which conditions a
complex positive definite function benefits of an integral representation and
eventually when it is unique. We found out that the existence or not of
such a representation depends on the regularity of the function; and that
the regularity of a complex positive definite function on a strip is completely
imposed by the regularity of the function on the interval of the imaginary
axis contained in the strip. In particular, we will see that a complex positive
definite function on a strip, that is at least continuous on the imaginary axis
will result holomorphic in the whole strip; and that holomorphy will ensure
the existence of a unique integral representation in the strip. Moreover,
we will state a generalization of the extension problem for complex positive
definite functions. In fact, we will show when and how a positive definite
function on an arbitrary codifference set can be extended to strips of the
complex plane. However, this results accomplish only in part the problem
of establishing the strips as the only set in which make sense to consider
positive definite functions.
4
Chapter 2
Positive definite functions
The purpose of this chapter is to introduce the theory of positive definite
functions of real variable and to extend, in case of analyticity, this concept
to complex-variable positive definite functions, see Z. Sasvári [2]. Moreover,
we will present the recent a priori description of positive definite functions
of complex variable, that is without requiring further regularity on the functions, mainly due to J. Buescu and A. C. Paixão, see [10] and [9].
2.1
Real-variable positive definite functions
Definition 2.1. A function f : R → C is positive definite if
m
X
ξj ξ k f (xj − xk ) ≥ 0
(2.1)
j,k=1
m
∀ m ∈ N, ∀ {ξk }m
k=1 ⊂ C and ∀ {xk }k=1 ⊂ R, that is, if every square matrix
[f (xj − xk )]m
j,k=1 is positive semi-definite.
Positive definite functions verify some basic properties that simply follow
from the definition considering the cases n = 1, 2 with a suitable choice of
m
the sequences {xk }m
k=1 and {ξk }k=1 , namely
1. f (0) ≥ 0;
2. f (−x) = f (x), ∀x ∈ R;
3. |f (x)| ≤ f (0) , ∀x ∈ R.
Theorem 2.1. Let f1 (x), f2 (x) be positive definite functions. Then the
functions f¯1 , f1 (−x), Re(f1 ), |f1 |2 and f1 f2 are positive definite. Moreover,
p1 f1 + p2 f2 is positive definite for all p1 , p2 ≥ 0.
5
Proof. See Theorem 1.3.2 of Sasvari [14].
However, the most significant result that holds for positive definite functions is the following representation theorem due to Bochner (1932).
Theorem 2.2 (Bochner’s theorem). A continuous function f : R → C is
positive definite if and only if it is the Fourier-Stieltjes transform of a finite
and non-negative measure µ on R, that is
Z +∞
eitx dµ(t).
(2.2)
f (x) =
−∞
Proof. We will only prove that for a function f to be a Fourier-Stieltjes
transform of a finite non-negative measure µ on R is sufficient to be a positive
definite function.
Z +∞ X
m
m
X
ξj ξ k f (xj − xk ) =
ξj ξ k ei(xj −xk )t dµ(t)
j,k=1
−∞ j,k=1
m
+∞ X
Z
=
ξj ξ k eixj t eixk t dµ(t)
−∞ j,k=1
Z
+∞
=
−∞
2
m
X
ξj eixj t dµ(t) ≥ 0.
j=1
For the other implication we refer to [6].
Another characteristic property of positive definite functions is a kind of
“propagation of regularity”. In fact, as a consequence of Bochner’s theorem,
we have that a positive definite function that is continuous in a neighborhood
of the origin is uniformly continuous on R.
Theorem 2.3 (Propagation of regularity). Let f : R → C be a positive
definite function of class C 2n in some neighborhood of the origin for some
positive integer n, then f ∈ C 2n (R).
Proof. Using Bochner’s representation (2.2) and standard tools from Harmonic Analysis, Donoghue [4] pag.186 proves the statement.
The above result holds even for C ∞ or analytic functions, see remark in
Buescu and Paixão [8] and the corresponding literature. Note that propagation of regularity only occurs for even-order derivatives, in fact even-order
derivatives play a central role in the theory of positive definite functions, as
follows from the next results too.
6
Proposition 2.1. Let f : R → C be a positive definite function of class
C 2n in some neighborhood of the origin for some positive integer n. Then
f ∈ C 2n (R) and for all integers 0 ≤ m ≤ n, the function (−1)m f 2m (x) is
positive definite.
Proof. See [8].
This result gives rise to a two-parameter family of differential inequalities
for positive definite functions which is very useful when dealing for example
with integral equations. In the context of positive definite kernel Hilbert
spaces, these inequalities may be interpreted as a generalized Cauchy-Schwarz
inequality.
Proposition 2.2. Let f : R → C be a positive definite function of class
C 2n in some neighborhood of the origin for some positive integer n. Then
f ∈ C 2n (R) and for all integers m1 , m2 with 0 ≤ m1 ≤ n, 0 ≤ m2 ≤ n and
every x ∈ R we have
|f (m1 +m2 ) (x)|2 ≤ (−1)m1 +m2 f (2m1 ) (0)f (2m2 ) (0).
(2.3)
Proof. See [8].
Remark 2.1. Observe that since (−1)m f (2m) (x) is positive definite for every
0 ≤ m ≤ n, the right hand-side of (2.3) is positive because of basic property
1 of positive definite functions, thus the inequality is meaningful.
Theorem 2.4. Let f : R → C be a positive definite function of class C 2n in
some neighborhood of the origin for some positive integer n. If f (2m) (0) = 0
for some non-negative integer m ≤ n, then f is constant on R.
Proof. The statement of this theorem trivially follows in the case m = 0,
since |f (x)| ≤ f (0) for every x ∈ R, and in the case m = 1 because of (2.3)
with m1 = 1 and m2 = 0, that implies |f 0 (x)|2 ≤ −f (0)f 00 (0) for every x ∈ R.
Using (2.3) it is possible to complete the proof, see [8].
We will recall a characterization of real analytic functions before stating
the next result.
Lemma 2.1. Let f be a real function in C∞ (I) for some open interval I.
Then f is real analytic if and only if, for each α ∈ I, there are an open
interval J, with α ∈ J ⊂ I, and constants C > 0 and R > 0 such that the
derivatives satisfy
k!
|f (k) (x)| ≤ C k ,
∀ x ∈ J.
(2.4)
R
7
Theorem 2.5. Let f : R → C be a positive definite function of class C ∞ in
some neighborhood of the origin. Then, if there exist positive constants M
and D such that
(2n)!
0 ≤ (−1)n f (2n) (0) ≤ D 2n
(2.5)
M
for every non-negative integer n, we have:
1. f is analytic in R;
q
(2n)
2. let l = lim sup 2n |f (2n)!(0)| , then l < ∞. Defining h = 1/l if l 6= 0
and h = ∞ if l = 0, there exist α, β ∈ [h, +∞] such that f extends
holomorphically to the complex strip S = {z ∈ C : −α < Im(z) < β},
where α and β are maximal with this property. Moreover, if h < ∞,
f cannot be holomorphically extended to both the points z = ih and
z = −ih simultaneously, implying in particular that h = min{α, β}.
Proof. See [8].
Remark 2.2. The statement of this theorem is slightly different from others
already known in the literature, for example Z. Sasvari [2] using stronger
hypothesis, that is including statement 1, concluding that the holomorphic
extension of f to the maximal strip S must present singularities in both
z = −iα and z = iβ whenever α and β are finite.
2.1.1
Co-positive definite functions
Next we state the definition of a co-positive definite function. It is convenient
to observe that a different sign in the definition with respect to positive
definite functions will lead to a completely different, but analogous, variety
of properties for these functions.
Definition 2.2. A function f : R → C is co-positive definite if
m
X
ξj ξ k f (xj + xk ) ≥ 0
(2.6)
j,k=1
m
∀ m ∈ N, ∀ {ξk }m
k=0 ⊂ C and ∀ {xk }k=1 ⊂ R, that is, if every square matrix
[f (xj + xk )]m
j,k=1 is positive semi-definite.
Co-positive definite functions do not verify the basic properties of positive
definite functions. However, considering the case n = 1 in (2.6) we conclude
that f (x) ≥ 0 for every x ∈ R, thus f has real values. Moreover, even for
this kind of function there exists a representation theorem due to Widder
(1933).
8
Theorem 2.6. A function f can be represented in the form
Z +∞
e−xt dα(t)
f (x) =
(2.7)
−∞
where α(t) is a non-decreasing function and the integral converges for a <
x < b if and only if f is continuous co-positive definite in the interval (a, b).
Proof. The proof of the sufficient condition is analogous to the part of Theorem 2.2 that we proved, for the other implication we refer to [19, 18].
2.2
Complex-variable positive definite functions
Complex-variable positive definite functions naturally arise from real-variable
positive definite functions in the conditions of Theorem 2.5. Indeed, an
analytic real-variable positive definite function extends holomorphically to a
horizontal strip of the complex plane S = {z ∈ C : −α < Im(z) < β}, with
α, β > 0 and maximal with this property. Bochner’s integral representation
(2.2) extends holomorphically to S too, so that
Z +∞
f (z) =
eitz dµ(t),
∀ z ∈ S.
(2.8)
−∞
Z. Sasvari, see [2], proved that a function with an integral representation
(2.8) verifies the property
m
X
ξj ξk f (zj − zk ) ≥ 0
j,k=1
∀m ∈ N, ∀{ξk }m
k=1 ⊂ C, ∀zj , zk ∈ S such that zj − zk ∈ S. In fact,
m
X
Z
+∞
ξj ξ k f (zj − zk ) =
j,k=1
m
X
−∞ j,k=1
m
+∞ X
Z
=
ξj ξ k ei(zj −zk )t dµ(t)
ξj ξ k eizj t eizk t dµ(t)
−∞ j,k=1
Z
+∞
=
−∞
9
m
2
X
ξj eizj t dµ(t) ≥ 0.
j=1
(2.9)
That is, a function f with the integral representation (2.8) is a complexvariable positive definite function.
In their recent work, J. Buescu and A. C. Paixão [10] give a definition
of complex-variable positive definite function that naturally arises from the
above observation of Z. Sasvari , but that requires no further assumption on
the regularity of the function. From this new definition of complex positive
definite function, Buescu and Paixão deduce a list of properties for that kind
of function and they figure out on which kind of complex set make sense to
consider a complex positive definite function. In the following, I will report
the main results (and their proofs) of this paper [10].
Definition 2.3. A function f : C → C is positive definite in the open set
S ⊂ C if
m
X
ξj ξ¯k f (zj − z¯k ) ≥ 0
(2.10)
j,k=0
∀m ∈ N,
∀{ξk }m
k=0
⊂ C, ∀zj , zk ∈ S such that zj − z¯k ∈ S.
Remark that Definition 2.3 does not require any regularity on the function
f and that in the complex case Bochner’s representation theorem is not
valid. Thus a complex function as in Definition 2.3 does not have an integral
representation (2.8). However, we already saw that holomorphic extensions of
real analytic positive definite functions have an integral representation (2.8)
and provide examples of complex positive definite functions on a complex
strip containing the real axis.
Moreover, another matter is now open: which kind of set S is such that
for every zj , zk ∈ S, then zj − z¯k ∈ S? On which kind of set S is then possible
to define a complex-variable positive definite function?
2.2.1
Codifference sets
In order to answer the problem of defining a suitable set such that the definition of complex-variable positive definite function is well-given, J. Buescu
and A. C. Paixão, [10], introduce the codifference sets.
Definition 2.4. A set S ⊂ C is a codifference set if there exists a set Ω ⊂ C
such that S may be written as
S = Ω − Ω ≡ {z ∈ C : ∃ z1 , z2 ∈ Ω : z = z1 − z 2 }.
(2.11)
We shall say that S =codiff(Ω).
Remark 2.3. Note that the set operation used in (2.11) is not the usual set
difference.
10
Here are some properties of codifference sets that directly follow from
Definition 2.4. Let S ⊂ C be a codifference set such that S =codiff(Ω), then
1. the set Ω is not uniquely determined. In particular, S is invariant under
any translation of the codifference-generating set Ω parallel to the real
axis.
2. If z ∈ S, there exist z1 , z2 ∈ Ω such that z = z1 − z 2 , obviously
z2 − z 1 = −z ∈ S. Hence any codifference set is symmetric with
respect to the imaginary axis.
3. Any non-empty codifference set intersects the imaginary axis.
If S =codiff(Ω) and z = a + ib = z1 − z 2 ∈ S for some z1 , z2 ∈ Ω, then
there exists β ∈ R such that z1 −z 1 = b+β ∈ S and z2 −z 2 = b−β ∈ S.
4. If Ω is open, then S is also an open set since it is union of open sets.
The simplest examples of codifference sets are the horizontal strips
S(r, α1 , α2 ) = {z = a + ib ∈ C : |a| < r, α1 < b < α2 }
with r, α1 , α2 positive real or infinite.
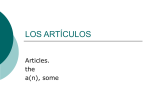
So S(r, α1 , α2 ) =codiff(S(r/2, α1 /2, α2 /2)). Another example of codifference
set are
S1 = codiff(Q1 (0) ∪ Q1 (3 + 3i)),
S2 = codiff(Q1 (0) ∪ Q1 (5 + 5i));
where
Qr (z) = {w ∈ C : |Re(w − z)| < r and |Im(w − z)| < r}.
See Figure 2.1 and note that a codifference set need not to be simply connected or even connected.
11
Figure 2.1: Codifference sets
2.2.2
Properties of complex positive definite functions
We now present some basic properties of complex-variable positive definite
functions directly derived from Definition 2.3 by J. Buescu and A. C. Paixão
[10]. Observe that most of the following properties are the complex analog
of the corresponding properties of real-variable positive definite functions.
Proposition 2.3 (Positivity on the imaginary axis). Let f be a complex
positive definite function on a codifference set S, f (ib) ≥ 0, ∀ib ∈ S, where
b ∈ R.
12
Proof. Let b ∈ R such that ib ∈ S and let z = ib2 such that z − z ∈ S,
then from Definition 2.3 with m = 1 follows that ξξf (z − z) ≥ 0, thus
f (ib) ≥ 0.
Therefore positive definite functions are always real and non-negative on
the imaginary axis.
Proposition 2.4 (Basic properties). Let f be a complex positive definite
function on a codifference set S, ∀a, b, β ∈ R such that ±a + ib and i(b ± β)
are in S
1. f (−a + ib) = f (a + ib),
∀x ∈ R;
2. |f (a + ib)|2 ≤ f (i(b − β))f (i(b + β)).
b+β
a
+
i
and
z
=
−
such that zi − z j ∈ S for
Proof. Let z1 = a2 + i b−β
2
2
2
2
i, j = 1, 2. From Definition 2.3 with m = 2 follows that
2
X
ξi ξ¯j f (zi − zj ) ≥ 0.
(2.12)
i,j=1
Therefore the complex matrix
f (i(b + β)) f (a + ib)
A=
f (−a + ib) f (i(b − β))
is positive semi-definite, which implies statements 1 and 2.
Let us now explicitly prove a basic property for complex variable positive
definite functions on strips of the complex plane, that directly follow from
the definitions of positive and co-positive definiteness.
Proposition 2.5. Let f be a complex-variable positive definite function on
the open strip S = {z ∈ C : a < Im(z) < b} with a, b ∈ R. Then
1. Fy (x) = f (x + iy) for some y ∈ (a, b) is a real-variable positive definite
function on R,
2. G(y) = f (iy) is a real-variable co-positive definite function on (a, b).
Proof. Remark that the open strip S is a codifference set for some open
set Ω, that is S =codiff(Ω). Therefore, in order to prove statement 1, let
13
zk = xk + i y2 and zj = xj + i y2 be in Ω such that zk − z̄j ∈ S. Observe that,
such zk and zj exist by virtue of property 2 of codifference sets. Then
n
X
ξk ξ j Fy (xk − xj ) =
k,j=1
=
n
X
ξk ξ j f (xk − xj + iy)
k,j=1
n
X
y
y
ξk ξ j f (zk − z j ) ≥ 0,
ξk ξ j f (xk + i − xj + i ) =
2
2
k,j=1
k,j=1
n
X
and statement 1 is proved. Similarly, to prove statement 2, let zk = iyk and
zj = iyj in Ω such that zk − z̄j ∈ S. Then
n
X
k,j=1
ξk ξ j G(yk + yj ) =
n
X
ξk ξ j f (i(yk + yj )) =
k,j=1
n
X
ξk ξ j f (zk − z j ) ≥ 0.
k,j=1
Thus G(y) is a co-positive definite function on (a, b), that is statement 2 is
proved.
Complex positive definite functions are controlled by their behaviour on
the imaginary axis as real positive definite function are controlled by their
behaviour at the origin. Indeed, this is the content of the following results.
Lemma 2.2. Let S be a codifference set such that S ∩ Im(z) = iI for some
real interval I, and let f : S → C be a positive definite function, then:
1. if f (iu) = 0 for some u ∈ I, then f (ic) = 0 for every c ∈ int(I);
2. if f (iu) 6= 0 for every u ∈ I, then logf is mid-point convex on iI.
Proof. Let c ∈int(I) and define a sequence un recursively by
c+un
if 2c − un ∈
/I
2
un+1 =
c
if 2c − un ∈ I
with u1 = u. Observe that there exists p ∈ N such that un = c for n ≥ p.
Then, we will show that f (iun ) = 0 for all n ∈ N since this implies that
f (ic) = 0. The statement is true for n = 1 by hypothesis. For each n we set
un = b − β, un+1 = b, a = 0 and b + β = 2un+1 − un , then using statement 2
of Proposition 2.4
|f (iun+1 )|2 ≤ f (iun )f (i(2un+1 − un )).
Hence, f (iun ) = 0 implies f (iun+1 ) = 0 for all n ∈ N. By induction and
since c is arbitrary in int(I) we complete the proof of 1. To prove statement
14
2, observe that since by hypothesis f (ib) 6= 0 for every b ∈ I, then because
of Property 2.3, f (ib) > 0 for all b ∈ I. Thus g = log(f ) is well-defined on
iI. Taking a = 0, b1 = b + β and b2 = b − β in statement 2 of Proposition
2.4 it follows that
ib1 + ib2
g(ib1 ) + g(ib2 )
≤
g
2
2
for every b1 , b2 ∈ I, and thus g is midpoint convex in iI.
Remark 2.4. The convexity of logf on the imaginary axis was already proved
by Dugué [5] under the further assumption that f is holomorphic.
Theorem 2.7. Let S be a codifference set in C and f : S → C a positive
definite function. If f is zero on every connected component of S ∩ Im(z),
then f is identically zero on S.
Proof. Let z = a + ib ∈ S. Property 3 of codifference sets establish the
existence of β such that b ± β ∈ S, while statement 2 of Proposition 2.4
asserts that |f (a + ib)|2 ≤ f (i(b − β))f (i(b + β)). By virtue of Lemma 2.2 the
hypothesis on the zeros of f implies that f vanishes identically on S ∩ Im(z),
leading to the conclusion that f ≡ 0 on S.
In order to do something similar to what was done for with real-variable
positive definite functions, J. Buescu and A. C. Paixão, [10], state a collection of differential properties for complex positive definite functions. However, this time the use of positive definite kernels in two complex variable
is mandatory since without further assumption of regularity a complex positive definite function does not possess of an integral representation. Positive
definite functions are related with positive definite kernels in two complex
variables in the following way. Suppose f is positive definite in S ⊂ C
and that V = {(z, u) ∈ C2 : z − ū ∈ S}. Define k : V → C such that
k(z, u) := f (z − ū). Let Ω ⊂ C such that Ω2 ⊂ V , that is such that
codiff(Ω) ⊂ S. Therefore
n
X
k(zi , zj )ξi ξ j ≥ 0
(2.13)
i,j=1
for all ξi ∈ C for i = 1, . . . , n. That is, k is a positive definite kernel in Ω.
Moreover, if f is holomorphic in S, then k is a sesquiholomorphic function
(i.e. analytic in the first variable and anti-analytic in the second variable) in
Ω2 , thus k is a holomorphic positive definite kernel in Ω. Under this further
assumption of regularity much more can be said. The following results are
proved in [7] for holomorphic positive definite kernels of several complex
variable.
15
Theorem 2.8. Let Ω ⊂ C be an open set and k : Ω2 → C be a holomorphic
positive definite kernel on Ω. Then for any m ∈ N
∂ 2m
km (z, u) :=
k(z, u)
∂ ūm ∂z m
is a holomorphic positive definite kernel on Ω.
Corollary 2.1. Let Ω ⊂ C be an open set and k : Ω2 → C be a holomorphic
positive definite kernel on Ω. Then for all z, u ∈ Ω and all m ∈ N we have
∂ 2m
k(z, z) ≥ 0 and
∂ ūm ∂z m
2
2m
∂ 2m
∂ 2m
≤ ∂
k(z,
u)
k(z,
z)
k(u, u).
∂ ūm ∂z m
∂ ūm ∂z m
∂ ūm ∂z m
Theorem 2.9. Let Ω ⊂ C be an open set and k : Ω2 → C be a holomorphic
positive definite kernel on Ω. Then for all m1 , m2 ∈ N and for all z, u ∈ Ω
we have
2
m +m
∂ 1 2
∂ 2m1
∂ 2m2
≤
k(z,
u)
k(z,
z)
k(u, u).
∂ ūm1 ∂z m2
∂ ūm1 ∂z m1
∂ ūm2 ∂z m2
The relation between complex positive definite functions and complex
positive definite kernels allow us to state similar results for holomorphic positive definite functions.
Theorem 2.10. Let S ⊂ C be an open codifference set and suppose that
f : S → C is positive definite and holomorphic in S. Then (−1)m f (2m) (z) is
a positive definite function in S for every m ∈ N.
Proof. We want to show that
n
X
(−1)m f (2m) (zi − z j )ξi ξ j ≥ 0
(2.14)
i,j=1
for every n ∈ N, for every ξi ∈ C with i = 1, . . . , n and for every zi ∈ C
for i = 1, . . . , n such that codiff(zi ) ∈ S, that is zij := zi − z̄j ∈ S for all
i,
Sj = 1, . . . , n. Consider Ω as the union of n squares QrS(z), that is Ω =
i=1,...,n Qr/2 (zi ), and choose r such that U :=codiff(Ω) =
i=1,...,n Qr (zij ) is
contained in S. Then k(z, u) := f (z − ū) is a positive definite kernel in Ω
and because of Theorem 2.8
∂ 2m
k(z, u) = (−1)m f (2m) (z − ū)
m
m
∂ ū ∂z
16
is a positive definite kernel in Ω, that is (2.14) is verified.
Theorem 2.11. Let S ⊂ C be an open codifference set and suppose that
f : S → C is positive definite and holomorphic in S. Suppose that S contains
the points ±a + ib and (b ± β)i for a, b, β ∈ R. Then, for every non-negative
integers m1 , m2 we have
|f (m1 +m2 ) (a + ib)|2 ≤ (−1)m1 +m2 f (2m1 ) (i(b + β))f (2m2 ) (i(b − β)).
(2.15)
Proof. Using the notation of the squares Qr (z), let a+ib = S
z12 , −a+ib = z21 ,
(b+β) = z11 and (b−β) = z22 . Choose r > 0 such that U = i,j=1,2 Q2r (zij ) ⊂
S. Consider the points z1 = a2 +i b+β
and z2 = − a2 +i b−β
such that zij =
2
2
zi − z j ∈ S for i, j = 1, 2. Defining Ω = Qr (z1 ) ∩ Qr (z2 ), U =codiff(Ω) ⊂ S
and then z − ū ∈ U ⊂ S for all z, u ∈ Ω. Therefore k(z, u) := f (z − ū) is a
positive definite kernel in Ω and because of Theorem 2.9 applied to the point
(z, u) = (z1 , z2 ) it is possible to obtain (2.15) by successive application of the
chain rule.
Let’s see now what it means for a meromorphic function to be positive
definite. In particular, the interest of J. Buescu and A. C. Paixão in [10] is to
understand if, for example, under the assumption of being positive definite
the poles of a meromorphic function can be easily found.
Theorem 2.12. Let Ω ⊂ C be an open set such that S =codiff(Ω). Suppose
f is meromorphic in S and positive definite in S ∩ D(f ), where D(f ) is the
domain of f . Then f is holomorphic in S.
Proof. Observe that, since Ω is open, S is open. Let z = a + ib ∈ S, then as
proved in property 2 of codifference sets, −z ∈ S. Moreover, from property
3 it follows that z11 := z1 − z 1 and z22 := z2 − z 2 lie in S whenever we write
z = z1 − z 2 for some z1 , z2 ∈ Ω and β = Im(z1 − z2 ). Since S is an open set
and the singularities of f are isolated, we may choose z1 , z2 , and therefore
β, such that z11 , z22 are points where f is analytic. Let zn := an + ib be
a sequence converging to z, that is, such that limn→+∞ an = a. Since f is
meromorphic the set of singularities of f has no accumulation points, there
exists p ∈ N such that f is analytic in both zn and −z n for all n ≥ p. For
each such n we apply inequality 2 of Proposition 2.4
|f (zn )|2 ≤ f (z11 )f (z22 ).
Suppose that z is a pole of f , then taking the limit we have that
limn→+∞ |f (zn )| = +∞, contradicting the previous inequality. Therefore z
cannot be a pole of f . Since z is an arbitrary point of S, then f is holomorphic
in S.
17
Corollary 2.2. Suppose f is meromorphic in C and positive definite in its
domain. Then f is entire.
Proof. Consider the strip S = {z = a + ib ∈ C : |a| < r and α1 < |b| <
α2 }. When r, α1 , α2 are infinite, then S ≡ C. Taking f meromorphic in S
with infinite r, α1 , α2 , it follows immediately from Theorem 2.12 that f is
entire.
Theorem 2.13. Suppose S is an open codifference set and let f : S → C
be a positive definite holomorphic function. If f (2m) (ib) = 0 for some nonnegative integer m and some b ∈ R such that z = ib ∈ S, then f is constant
on the open connected component of S containing ib.
Proof. Since f is holomorphic in a neighborhood of ib, F (x) = f (x + ib)
defines an analytic real-variable function on an interval I = (−ε, ε) for some
positive ε. Moreover, F (x) is positive definite as proved in Proposition 2.5
and such that F (k) (x) = f (n) (x + ib) for every x ∈ I and any non-negative
integer k. By virtue of Proposition 2.1 with m1 = 0 and m2 = m we have
|F (m) (x)|2 ≤ (−1)(m) F (0)F (2m) (0) ∀x ∈ I.
Using the inequality with m = 1, we obtain
|F 0 (x)|2 ≤ −F (0)F 00 (0) ∀x ∈ I.
(2.16)
If F (m) (0) = 0 for m = 0 or m = 1 the thesis is trivially true. Consequently
we will consider that m > 1. The idea of the proof is to show that F (2m) (0) =
0 implies F 00 (0) = 0 for m > 1 since under that hypothesis it is possible to
conclude from (2.16) that F 0 vanishes identically on I and, consequently,
that f 0 (x + ib) = 0 for every x ∈ I. Since f is holomorphic on S, analytic
continuation of f ensures that f 0 (z) = 0 on the open connected component
of S containing ib, implying that f is constant on this set and proving the
statement. To prove the implication, suppose m > 1 and define by recurrence
a sequence of even numbers, with k1 = 2m and
ki
if ki /2 is even
ki+1 = ki 2
+ 1 if ki /2 is odd.
2
Notice that ki+1 < ki whenever ki > 2 and that 2 is a fixed point of the
recurrence. Then, there exists j(m) such that kl = 2 for all l ≥ j; in fact it
is easily shown that j(m) ≤ m. We now prove that f ki (0) = 0 for all i ∈ N.
Suppose that the statement is true for some i ∈ N; then using inequality
18
(2.16) with m1 = 0 and m2 = ki we obtain
|F (ki /2) (x)|2 ≤ (−1)ki /2 F (0)F (ki ) (0)
for every x ∈ I. Since F (ki ) (0) = 0 we conclude that F (ki /2) (x) for all x ∈ I,
which implies in particular that F (ki /2)+1 (0) = 0. According to the definition
of the ki , we conclude that F (ki +1) (0) = 0. Hence F (ki ) (0) = 0 for all i ∈ N.
But as observed ki reaches 2 in a finite number of steps. In particular, this
implies that F 00 (0) = 0 and |F 0 (x)| = 0 for every x ∈ I, completing the
proof.
If f is meromorphic in C and analytic in z ∈ D(f ), we denote by r(z)
the
q radius of convergence of the Taylor series of f about z. Defining l(z) =
n
|f (n) (z)|
,
n!
of course r(z) = 1/l(z) if l(x) 6= 0 and r(z) = ∞ if l(z) = 0.
Lemma 2.3. Let f be a meromorphic function in C. Suppose f is positive
definite in S ∩ D(f ) for some open codifference set S ⊂ C and that ±a +
ib, b ± iβ ∈ S ∩ D(f ) for some a, b, β ∈ R. Then
r2 (a + ib) ≥ r(i(b + β))r(i(b − β)).
(2.17)
q
n |f (n) (z)|
Proof. For any z where f is analytic, define un (z) =
and observe,
n!
by considering the odd and even subsequences of un (z), that
lim sup un (z) = max{lim sup u2n (z), lim sup u2n+1 (z)}.
n→∞
n→∞
(2.18)
n→∞
Suppose, in addition, that z ∈ S is a point on the imaginary axis. The idea
is to show that
lim sup u2n+1 (z) ≤ lim sup u2n (z),
(2.19)
n→∞
n→∞
since this implies
lim sup un (z) = lim sup u2n (z).
n→∞
n→∞
For z = ib, using inequality (2.15) with a = 0, m1 = n and m2 = n + 1 we
have
|f (2n+1) (ib)|2 ≤ f (2n) (ib)f (2n+2) (ib).
19
Then we have
2
|f (2n+1) (ib)| 2n+1
≤
(2n + 1)!
(2n)
1 2 1 2n+2 1
|f (ib)| 2n 2n+1 |f (2n+2) (ib)| 2n+2 2n+1 2n + 2 2n+1
(2n)!
(2n + 2)!
2n + 1
establishing (2.19) and that
r
l(ib) = lim sup
2n
n→∞
|f (2n) (ib)|
.
2n!
(2.20)
To conclude the proof, consider now the more generic points ±a+ib, (b±β)i.
Direct use of inequality (2.15) with m1 = n and m2 = n + 1 yields
|f (2n+1) (a + ib)|2 ≤ f (2n) (i(b + β))f (2n+2) (i(b − β)).
By a similar calculation to the one above we obtain
lim sup
n→∞
lim sup
n→∞
|f (2n+1) (a + ib)|
(2n + 1)!
|f (2n) (i(b + β))|
(2n)!
2
2n+1
≤
2n1
lim sup
n→∞
|f (2n+2) (i(b − β))|
(2n + 2)!
or, in view of (2.20),
2
lim sup u2n+1 (a + ib) ≤ l(i(b + β))l(i(b − β)).
n→∞
On the other hand using inequality (2.15) with m1 = m2 = n
|f (2n) (a + ib)|2 ≤ |f (2n) (i(b + β))||f (2n) (i(b − β)|,
implying that
2
lim sup u2n (a + ib) ≤ l(i(b + β))l(i(b − β)).
n→∞
Therefore, according to (2.18)
l2 (a + ib) ≤ l(i(b + β))l(i(b − β)).
20
1
2n+2
Hence, we have
r2 (a + ib) ≥ r(i(b + β))r(i(b − β)),
finishing the proof.
Theorem 2.14. Let S ⊂ C be an open codifference set containing z = ib,
b ∈ R. Suppose f is meromorphic in C and positive definite in S ∩ D(f ),
where D(f ) is its domain. If f has no poles on the imaginary axis, then f
is entire.
Proof. If f has no poles on the imaginary axis, then there exists h > 0 such
that f is positive definite and holomorphic on the square Qh (ib). Hence using
the results of Lemma 2.3 it is possible to conclude that
r(a + ib) ≥ r(ib)
(2.21)
for every a ∈ (−h, h). If r(ib) < ∞, then f must have a pole z0 = a0 + ib0
such that |z − z0 | = r(ib) and a0 6= 0 since by hypothesis f has no poles on
the imaginary axis. Choose a ∈ (−h, h) such that |a − a0 | ≤ |a0 |, and write
z = a + ib. Then
q
p
2
2
|z − z0 | = |a − a0 | + |b − b0 | < a20 + |b − b0 |2 = |z0 − ib|
implying that r(a+ib) ≤ |z −z0 | < |z0 −ib0 | = r(ib) and contradicting (2.21).
Hence r(ib) must be infinite and we conclude that f has no poles.
Theorem 2.15. Suppose S ⊂ C is an open codifference set. Let L(b0 ) be
the horizontal line defined by L(b0 ) = {z ∈ C : z = a + ib0 }, for b0 ∈ R,
and let f be a meromorphic function in C. Suppose f is positive definite
in S ∩ D(f ) and that L(b0 ) ⊂ S ∩ D(f ). Then f has no poles on the strip
S = {z = a + ib ∈ C : a ∈ R and |b − b0 | < r(b0 )}. If r(b0 ) is finite, then at
least one of i(b ± r(b0 )) is a pole of f .
Proof. From Lemma 2.3 we have that r(ib0 ) ≤ r(a + ib0 ) for every a ∈ R.
Since r(a + ib0 ), a ∈ R, is the radius of convergence of the Taylor series of
f centered at z = a + ib0 , the distance from the set of poles of f to the line
L(b0 ) must be greater or equal than r(b0 ) and the first assertion follows. If
r(ib0 ) is finite we conclude that at least one of i(b + β) and i(b − β) is a pole
of f , finishing the proof.
Corollary 2.3. In the conditions of Theorem 2.15, f extends holomorphically to a maximal strip SM = {z ∈ C : −α + b0 < Im(z) < β + b0 },
21
where α, β ∈ (0, +∞[, as a positive definite function admitting, for some
non-negative measure µ, the integral representation
Z +∞
e−(iz−b0 )t dµ(t),
∀ z ∈ SM .
(2.22)
f (z) =
−∞
Moreover, r(b0 ) = min{α, β} and f has a pole at b0 − iα (resp. b0 + iβ) if α
(resp. β) is finite.
Proof. Let F (x) = f (x + ib0 ) for x ∈ R. It is readily seen that F (x) is a realvariable positive definite function and that it is analytic on R, and therefore
admits a holomorphic extension F(z) to the strip S0 = {z ∈ C : −α <
Im(z) < β}, where α, β are maximal with this property. Then, according to
Theorem 1.12.5 in [2], we write
Z +∞
e−itz dµ(t), −α < Im(z) < β
(2.23)
F(z) =
−∞
and conclude, by virtue of this formula, that F is positive definite in S0 .
Furthermore, we also have that −iα (resp. iβ) is a singularity of f if α < ∞
(resp. β < ∞). Now, since F(z) is a holomorphic extension of F (x) =
f (x + ib), x ∈ R, and f is meromorphic in C, it follows that
F (z) = f (z + ib),
Hence from (2.23) we derive that
Z
f (z) =
for z ∈ S0 .
(2.24)
+∞
e−(iz−b0 )t dµ(t)
(2.25)
−∞
for every z ∈ SM and conclude that f is positive definite on this strip. From
(2.24) it now follows that i(b0 − α) (resp. i(b0 + β)) is a pole of f whenever
α < ∞ (resp. β < ∞). As a direct consequence of Theorem 2.15, r(b0 ) must
be the minimun between α, β.
22
Chapter 3
Characteristic functions
Positive definite functions and their various analogs and generalizations have
arisen in different parts of mathematics since the beginning of the 20th century. They occur naturally in Fourier analysis, probability theory, operator
theory, complex-variable function theory, moment problems, integral equations and other areas. Since the concept of positive definite function is such
a fundamental entity in so many distinct mathematical theories, the results
never had been collected in one single body doctrine. In what follows, we
will go into more detail on probability theory’s analogs of positive definite
functions, namely characteristic functions, moment generating functions and
moment problem. In fact, we found the probabilistic point of view extremely
useful when dealing with integral representations of complex-variable positive
definite functions, as we will see in the next chapter. However, instead of presenting a common description of these tools, as can be found in any manual
of probability theory, we will look at characteristic and moment generating
functions as good examples of respectively positive definite and co-positive
definite functions. In order to do this, we will just present properties of these
functions that will be useful for the purpose of this thesis. Let us start with
some basic recalls from the probability theory. For a more in-depth analysis
and eventual clarifications about what is next we refer to the book of R. Ash
[1].
Definition 3.1. Let F be a collection of subsets of a set Ω. Then F is called
a algebra if and only if
1. Ω ∈ F,
2. if A ∈ F, then Ac ∈ F.
3. if A1 , A2 , . . . , An ∈ F, then
Sn
i=1
Ai ∈ F.
23
If 3 is replaced by closure under countable union, that is,
S
3. if A1 , A2 , . . . ∈ F, then ∞
i=1 Ai ∈ F.
F is called σ-algebra.
Example 3.1. If Ω is the set R of extended real numbers, and F consist of
all finite disjoint unions of right-semiclosed intervals —(a, b] with −∞ ≤ a <
b ≤ +∞—, then F forms an algebra, but not a σ-algebra.
The collection of Borel sets of R, denoted by B(R), is defined as the
smallest σ-algebra containing all the intervals (a, b] with a, b ∈ R. Note that
B(R) is garanteed to exist, and it may be described as the intersection of all
σ-algebras containing the intervals (a, b]. Also if a σ-algebra contains all the
open intervals, it must contain all the intervals (a, b], and conversely. In fact
∞ ∞ [
[
1
1
and (a, b) =
a, b −
.
(a, b] =
a, b +
n
n
n=1
n=1
(3.1)
Thus B(R) is the smallest σ-algebra containing all the open intervals. Similarly we can generate the Borel σ-algebra B(R) replacing the intervals (a, b]
by other classes of intervals, for example
[a, b),
[a, b],
with −∞ ≤ a < b ≤ +∞.
Definition 3.2. A measure on a σ-algebra F is a non-negative, extended
real-valued function µ such that whenever A1 , A2 , . . . form a finite or countably infinite collection of disjoint sets in F, we have
!
X
[
µ(An ).
(3.2)
µ
An =
n
n
A measure space is a triple (Ω, F, µ) where Ω is a set, F is a σ-algebra of
subsets of Ω, and µ is a measure on F.
Definition 3.3. A measure µ defined on F is said to be finite if and only if
µ(Ω) is finite.
A measure
µ on F is said to be σ-finite on F if and only if Ω can be written
S
as ∞
A
n=1 n where An belong to F and µ(An ) < ∞ for all n.
24
Theorem 3.1 (Carathéodory’s extension theorem). Let µ be a measure on
the algebra F0 of subsets
of Ω and assume that µ is σ-finite on F0 , so that Ω
S+∞
can be decomposed as n=1 An where An ∈ F0 , and µ(An ) < ∞, ∀ n. Then
µ has a unique extension to a measure on the minimal σ-algebra F over F0
Proof. See [1].
Definition 3.4. A Lebesgue-Stieltjes measure on R is a measure µ on B(R)
such that µ(I) < ∞ for each bounded interval I. A map F : R → R that is
increasing and right-continuous is a distribution function
We are going to show that µ(a, b] = F (b) − F (a) sets up a one-to-one
correspondence between Lebesgue-Stieltjes measures and distribution functions.
This, in particular, will better explain the statement of Widder’s theorem
2.6 where an integral representation with respect to a non-decreasing function
appears, and will allow us to make the notation of this thesis uniform. We
needed to enlight this correspondence in order to clarify the relation between
Bochner’s and Widder’s integral representations. In fact, this relation will
be useful in the next chapter, when dealing with integral representations in
the complex settings.
Theorem 3.2. Let µ be a Lebesgue-Stieltjes measure on R. Let F : R → R
defined up to an additive constant, by F (x) − F (a) = µ(a, b]. (For example
fix F (0) arbitrarily and set F (x) − F (0) = µ(0, x], x > 0; F (0) − F (x) =
µ(x, 0], x < 0). Then F is a distribution function.
Proof. See [1].
Theorem 3.3. Let F be a distribution function on R and let µ(a, b] = F (b)−
F (a), a < b. There is a unique extension of µ to a Lebesgue-Stieltjes measure
on R.
Proof. This is an application of Carathéodory’s extension theorem, see [1].
Furthermore, µ is always σ-finite and is finite whenever F is bounded.
Example 3.2. For F (x) = x we have µ(a, b] = b − a, for a < b, such µ is the
Lebesgue measure on B(R).
For the complete theory and the missing results and proofs we refer to R.
Ash [1].
25
Recall that Widder’s theorem 2.6 states that a continuous function f is
co-positive definite if and only if there exists a non-decreasing function α(t)
such that
Z +∞
e−xt dα(t).
f (x) =
(3.3)
−∞
Since α(t) is non-decreasing the set of discontinuity points of α(t) is at most
countable.
In fact, let D the set of discontinuity points of α. For every t0 ∈ D, α(t+
0) >
α(t−
),
where
0
−
α(t+
0 ) = lim+ α(t) and α(t0 ) = lim+ α(t)
t→t0
t→t0
and the above limits exist for every t0 ∈ D by monotonicity of α(t). Thus,
+
−
for every interval (α(t−
0 ), α(t0 )) we can choose qt0 ∈ Q such that α(t0 ) <
+
qt0 < α(t0 ). Since α(t) is non-decreasing if t0 6= s0 ∈ D then qt0 6= qs0 , thus
t0 7−→ qt0 is a one-to-one map from D to Q, and since Q is countable, so is
D.
Then we can define β(t) : R → R such that {t ∈ R : β(t) 6= α(t)} is at
most countable, and such that β(t) is non-decreasing and right-continuous,
namely a distribution function. Hence, by Theorem 3.3, we can define a
Lebesgue-Stieltjes measure µ from β(t) such that µ is non-negative, σ-finite
on B(R) and eventually finite whenever β(t) is bounded.
Remark that the measure generated from α(t) is equivalent to the measure
generated from β(t) whenever µ({t} == 0 for every t ∈ R. In light of
this construction, Widder’s theorem 2.6 can be stated as follows. If f is a
continuous co-positive definite function on (a, b) with a, b ∈ R, then there
exists a non-negative and σ-finite measure µ such that
Z +∞
f (x) =
e−xt dµ(t),
x ∈ (a, b).
(3.4)
−∞
The most significant difference between Widder’s integral representation
for co-positive definite functions and the one of Bochner for positive definite
functions is in the measure with respect to the integrals are made. In fact,
unlike Bochner’s theorem, Widder’s statement not guarantee that the measure is in general finite. Consequently, Bochner’s representation must always
converge in a neighborhood of the origin, while Widder’s representation does
not necessarily do so. Let us now finally give the definition of characteristic
function.
Definition 3.5. Let µ be a probability measure on R. The characteristic
26
function of µ is the mapping from R to C given by
Z ∞
h(x) =
eitx dµ(t),
x ∈ R.
(3.5)
−∞
Thus h is the Fourier transform of µ. If F Ris a distribution function
∞
corresponding to µ, we shall also write h(t) = −∞ eitx dF (t), and call h
the characteristic function of F (or of X, if X is a random variable with
distribution function F ). A characteristic function as in (3.5) is of course
defined for all x ∈ R, whenever t is a real number. In particular, if µ is a
probability measure, h(0) = 1.
Remark 3.1. By virtue of Bochner’s representation theorem, a characteristic function is always a real-variable positive definite function and even the
converse is true up to a normalization factor.
According to the Remark above and to the positive definite functions’
basic properties, characteristic functions verifies the followings.
Theorem 3.4. Let h be the characteristic function of the bounded distribution F . Then
1. |h(x)| ≤ h(0) for all x,
2. h is continuous on R,
3. h(−x) = h(x),
R
4. h(x)
is real-valued if and only if F is symmetric; that is, B dF (t) =
R
dF (t) for all Borel sets B, where −B = {−x : x ∈ B}.
−B
R
5. If R |t|r dF (t) < ∞ for some positive integer r, then the rth derivative
of h exists and is continuous on R, and
Z
(r)
h (x) = (it)r eixt dF (t)
(3.6)
R
Proof. See R. Ash [1], Theorem 7.1.5.
Next we present some properties of analytic characteristic functions. They
are mainly due to Sasvari [2] and are basically results of analytic continuation
to the complex plane.
Theorem 3.5. If f is an analytic characteristic function then there exist
αf , βf ∈ (0, ∞] such that f extends to a function which is holomorphic in
the strip {z ∈ C : −αf < Im(z) < βf } and such that αf and βf are maximal
with this property.
27
Proof. See Sasvari [2], Theorem 1.12.2.
Theorem 3.6. Let f be an analytic characteristic function and let µ be the
corresponding probability measure. Then
Z ∞
f (z) =
eitz dµ(t),
−αf < Im(z) < βf .
(3.7)
−∞
If αf < ∞ (βf < ∞) then −iαf (iβf , respectively) is a singularity of f .
Proof. See Sasvari [2], Theorem 1.12.5.
Remark that, since an analytic characteristic function as in the conditions
of Theorem 3.5 can be holomorphically extended to a function as in (3.7)
then, according to what we observed in Chapter 1, it is a complex-variable
positive definite function in the strip {z ∈ C : −αf < Im(z) < βf }. And
thus, all the properties presented in Chapter 1 for complex positive definite
functions are valid here.
Proposition 3.1. A necessary condition for a function that is analytic in
some neighborhood of the origin to be a characteristic function is that in either
half-plane the singularity nearest to the real axis is located on the imaginary
axis.
Proof. See Lukacs [12].
Proposition 3.2. An analytic characteristic function h(z) has no zeros on
the segment of the imaginary axis inside the strip of analyticity. Moreover,
the zeros and the singular points of h(z) are located symmetrically with respect
to the imaginary axis.
Proof. See Lukacs [12].
Theorem 3.7 (Lévy-Raikov). Let h be an analytic characteristic function,
and assume that h = h1 h2 , where h1 and h2 are both characteristic functions.
Then the factors h1 and h2 are also analytic functions, and their representations as Fourier integrals converge at least in the strip of convergence of
h.
Proof. See Theorem II b. Dugué [5] and Lukacs [12].
28
3.1
Moment generating functions
The moment generating function has been widely used by statisticians, and
especially by the English writers, in place of the closely-related characteristic
function. In fact, from both functions it is possible to extract informations
on the corresponding probability measure or distribution function. Before
we give the definition of moment generating function another notion must
be recalled, namely the one of moments of a probability measure.
Definition 3.6. Let µ be a probability measure on R, for any n ∈ N, the
moment Mn of µ is defined as
Z +∞
xn dµ(x).
(3.8)
Mn =
−∞
We
should note that if n is odd, in order for Mn to be defined we must
R +∞
have −∞ |x|n dµ(x) < ∞. Given a probability distribution µ, either all the
moments may exist, or they exist only for 0 ≤ n ≤ n0 for some n0 . It could
1
be that n0 = 0 as happens for example is for the Cauchy distribution π(1+x
2) .
The characteristic function of a given probability measure is strictly related to the corresponding moments. In fact, from equation (3.6) of Theorem
3.4 it easily follows that
Mn = (−i)n h(n) (0)
(3.9)
whenever the n-th derivative of h exists at zero. That is, if all the derivatives
of the characteristic function exist at the origin, then all the moments of the
measure exist.
Definition 3.7. Let µ be a probability measure. The function
Z +∞
etx dµ(x),
t∈R
G(t) =
(3.10)
−∞
in which the integral is assumed to converge for t in some neighborhood of
the origin, is called moment generating function of µ.
Remark that, if a probability measure has a moment generating function
that converges in a non-trivial interval, then the domain of the correspondig
characteristic function can be extended to the complex plane by
h(−it) = G(t).
(3.11)
However, remark that the characteristic function of a distribution always
exists, while the moment generating function may not.
29
Let us now recall a standard result, namely Leibniz’s integral rule for
differentiation under a Lebesgue-Stieltjes integral sign. We cite it here in
order to calculate the derivatives of a moment generating function.
Proposition 3.3 (Leibniz’s rule). Let I be an open subset of R and (Ω, F, µ)
a measure space. Suppose f : Ω × I → R satisfies:
1. f(x,t) is a µ-integrable function of x for every t ∈ I.
2. For almost all x ∈ Ω,
∂f (x,t)
∂t
exist for all t ∈ I.
(x,t)
| ≤ g(x)
3. There exists an integrable function g : Ω → R such that | ∂f∂t
for all t ∈ I.
Then for all t ∈ I
d
dt
Z
Z
f (x, t)dµ(t) =
I
I
∂f (x, t)
dµ(t)
∂t
(3.12)
Thus, a moment generating function (3.10) converging in an interval, say
(−a, b) for some a, b ∈ R+ , is such that
Z +∞ n
Z
dn +∞ tx
∂ tx
dn
G(t) = n
e dµ(x) =
e dµ(x)
n
n
dt
dt −∞
−∞ ∂t
for every n ∈ N and t ∈ (−a, b), because of Leibniz’s rule. That is, a moment
generating function is infinitely differentiable in the interval of convergence.
Actually, even more is true, a moment generating function is analytic in the
interval of convergence.
Proposition 3.4. Let µ be a probability measure and let G(t) be the corresponding moment generating
R +∞ function such that G(t) < ∞ for every |t| < t0 ,
for some t0 > 0. Then −∞ |x|n dµ(x) < ∞ for n ≥ 0 and G(t) is analytic in
|t| < t0 with
R +∞ n
+∞
X
x dµ(x)tn
−∞
G(t) =
.
(3.13)
n!
n=0
In particular the derivative of order k at zero is given by
Z +∞
(k)
G (0) =
xn dµ(x).
−∞
Proof. See e.g. [13].
30
Remark 3.2. Proposition 3.4 says that the n-th derivative of G(t) at 0 equals
the n-th moment of the probability measure µ (thus explaining the termi0
nology
R +∞ “moment generating
R +∞ 2 function”). For example, G(0) = 1, G (0) =
xdµ(x) , G(0) = −∞ x dµ(x) , etc.
−∞
Remark 3.3. By virtue of Widder’s representation (theorem 2.6) we have that
a moment generating function g is of course a co-positive definite function.
Conversely, we know that for a co-positive definite function there exists a
non-decreasing function F —and thus a non-negative, σ-finite Borel measure
µ on R— such that
Z +∞
Z +∞
tx
etx dµ(x)
(3.14)
e dF (x) =
g(t) =
−∞
−∞
for some t ∈ (a, b). Therefore, whenever g(t) converges at zero, and thus the
interval of convergence (a, b) contains the origin, g(t) is a moment generating
function. On the other hand, if (a, b) does not contain the origin g(t) is not
a moment generating function in the classical sense, but still conserves some
of its properties for example being analytic in the interval of convergence.
We will prove this fact in the next chapter.
Even more is true for a moment generating function. In fact, according
to the next statement of Dugué such a function can be analytically continued
to the complex plane.
Proposition 3.5. Consider the moment generating function G(x) corresponding to the probability measure µ and let (−a, b) with a, b > 0 be its
interval of convergence. Then G(z) is analytic in the strip −a < Re(z) < b.
In fact,
Z
+∞
eitz dµ(t)
G(z) =
(3.15)
−∞
is absolutely convergent for −a < Re(z) < b.
Proof. See Dugué [5] and Lukacs [12].
Remark 3.4. The result of Proposition 3.5 remains valid considering a copositive definite function instead of a moment generating function. That
is, the result is still true even when the measure µ is just σ-finite. From
another point of view, it is well-known that a two-sided Laplace transform is
analytic in its region of absolute convergence. We will return to this in the
next Chapter.
31
3.2
Moment problem
The moment problem arises in mathematics as result of trying to invert the
mapping that takes a measure µ to the sequences of moments Mn . Indeed, it
can be summarized as follows: “Given a sequence Mn , under which conditions
does there exist a measure µ on R such that all the moments of µ exist
and are equivalent to Mn for every positive integer n?”. In the literature
we distinguish between three different moment problems depending on the
support of the measure µ, namely
the Hamburger moment problem, if the support of the measure µ is R;
the Stieltjes moment problem, if the support of the measure µ is (0, ∞];
the Hausdorff moment problem, if the support of the measure µ is a
bounded interval, which without loss of generality may be taken as
[0, 1].
Obviously, Hamburger, Stieltjes and Hausdorff are the names of the mathematicians that solved the corresponding moment problems. In the next
section we will focus on the Hamburger moment problem since it is closely
related to the already-known positiveness and co-positiveness conditions.
3.2.1
Hamburger moment problem
Definition 3.8. A sequence Mn is a Hamburger moment sequence if there
exists a positive Borel measure µ on the real line R such that
Z +∞
Mn =
tn dµ(t).
(3.16)
−∞
We say that a Hamburger moment sequence is determined if the positive Borel measure according to Definition 3.8 exists and is unique. There
exist further conditions that may be imposed on the moments to guarantee
uniqueness, as for example Carleman’s and Krein’s conditions, but we will
not go into details on it. For in-depth analysis we refer to [16]. Here, we will
just present Carleman’s condition since it is the most general one.
Theorem 3.8 (Carleman’s condition). A sufficient condition for the Hamburger moment problem to be determined is that
∞
X
−
1
M2n2n = +∞.
n=1
32
(3.17)
More generally, it is sufficient that
∞
X
−1
γ2n
= +∞,
(3.18)
n=1
where
1
2n
).
γ2n = inf (M2n
r≥n
(3.19)
Proof. See [16] pag. 19.
As already said, Hamburger provided a complete characterisation for a
Hamburger moment sequence.
Proposition 3.6 (Hamburger). A sequence Mn is a Hamburger moment
sequence if and only if
m
X
ξj ξ¯k Mj+k ≥ 0
(3.20)
j,k=0
∀m ∈ N, ∀{ξk }m
k=0 ⊂ C.
Therefore, a Hamburger moment sequence must verify a kind of copositive condition. In light of this, the next result will not be so impressive.
Proposition 3.7 (Hamburger). If f (x) is analytic in a < x < b, and
n
X
f (i+j) (c)ξi ξ j ≥ 0
(3.21)
i,j=0
for a fixed c ∈ (a, b), then
Z
+∞
e−xt dµ(t)
f (x) =
(3.22)
−∞
where µ(t) is a non-decreasing function, and the integral converges in (a, b).
Thus, Hamburger established a direct relation between co-positive definite functions and Hamburger moment sequences. In fact, he stated that
whenever a function f is analytic on an interval (a, b), if for every fixed point
c ∈ (a, b) the sequences of the derivatives of f in c are Hamburger moment
sequences —because of Hamburger’s characterisation 3.6—, then f must be
a co-positive definite function in (a, b) for Widder’s representation theorem
2.6.
33
On the other hand, the Hamburger moment problem is related to positive
definite functions too. The following results are basically due to Devinatz
and can be found in [3].
Suppose that f (x) is an infinitely differentiable positive definite function.
That is
Z +∞
eixt dµ(t)
(3.23)
f (x) =
−∞
where µ(t) is a finite and non-negative Borel measure on R. Since f (x) is
infinitely differentiable, obviously
Z +∞
(n)
in tn eixt dµ(t).
(3.24)
f (x) =
−∞
Therefore, the sequence {(−i)n f (n) (0)}∞
n=0 is a Hamburger moment sequence.
Moreover, if {ξk }∞
is
an
arbitrary
complex
sequence and m is any nonn=0
negative integer, then
2 Z
2
n
n
X
+∞
X
ξk (−i)k f k+m (x) = tm eixt
ξk tk dµ(t)
−∞
k=0
k=0
2
Z +∞
Z +∞ X
n
2m
k
≤
t dµ(t)
ξk t dµ(t)
−∞
−∞ k=0
= Mm
n X
n
X
ξr ξ¯s (−i)r+s f (r+s) (0).
r=0 s=0
where Mm = (−i)2m f (2m) (0).
Conversely, adding to these two necessary conditions a third condition,
namely that {(−i)n f (n) (0)}∞
n=0 is a determined Hamburger moment sequence,
then these three conditions are sufficient for an infinitely differentiable function on R to have the representation (3.23) and thus to be a positive definite
function. In fact, even more is true. In fact, Devinatz proved that if f (x) is
infinitely differentiable just on some open interval containing the origin and
satisfies the above conditions, then it has the representation (3.23), that is
it can be extended to a positive definite function on R. Moreover, since the
Hamburger moment sequence is by hypothesis determined, then the extension is clearly unique. We will return to the problem of extension for positive
definite functions in the next chapter.
Theorem 3.9 (Devinatz). Let f (x) be an infinitely differentiable function
defined on the open interval (−a, b) where a, b > 0. If
34
1. {(−i)n f (n) (0)}∞
n=0 is a determined Hamburger moment sequence and
2. for every non-negative integer m there exists an Mn > 0 such that for
every x ∈ (−a, b) and every finite complex sequence {ξk }nk=0
n
2
n X
n
X
X
k k+m
ξr ξ¯s (−i)r+s f (r+s) (0)
ξk (−i) f
(x) ≤ Mm
(3.25)
r=0 s=0
k=0
then there exists a bounded non-negative measure µ(t) such that
Z +∞
f (x) =
eixt dµ(t).
(3.26)
−∞
Proof. See Devinatz [3].
Remark 3.5. Remark that the first two necessary conditions, namely that f
is infinitely differentiable at zero and that {(−i)n f (n) (0)}∞
n=0 is a Hamburger
moment sequence, are not sufficient if {(−i)n f (n) (0)}∞
n=0 is not a determined
Hamburger moment sequence. Statement 2 is a technical condition needed
for the proof. In fact, Theorem 3.9 admits proof in the more abstract setting
of the associated reproducing kernel Hilbert space. We would not discuss this
subject since it would lead far from the purposes of this thesis.
However, Devinatz’s result can be applied to the case of a complex positive definite function on a strip of the complex plane. Suppose then, that S is
an open strip of the complex plane. Then there exists an open set Ω such that
S =codiff(Ω). Assume that S = {z ∈ C : −a < Im(z) < b} with a, b > 0
and that f (z) is a complex-variable positive definite function on S. We know
from Property 2.5 that Fy (x) = f (x + iy) is a real-variable positive definite
function for every fixed y ∈ (−a, b) and that g(y) = f (iy) is a real-variable
co-positive definite function on (−a, b). On the other hand, the functions Fy
are always analytic at zero whenever f (z) is at least continuous on i(−a, b),
that is whenever g(y) is continuous on (a, b). In fact, under this assumption
g(y) is a moment generating function, see Remark 3.3, and is thus analytic
on (−a, b) by virtue of Proposition 3.4. Therefore, under this suitable con(n)
dition and according to Theorem 3.9 of Devinatz, {(−i)n Fy (0)}∞
n=0 is a
Hamburger moment sequence such that
Z +∞
y
n (n)
Mn = (−i) Fy (0) =
tn dµy (t)
(3.27)
−∞
35
where Mny indicates the n-th moment corresponding to the Hamburger moment sequence obtained for fixed y ∈ (−a, b).
From this observation and from the inequalities of Proposition 2.4 with
2
for complex-variable positive definite functions, we
a = 0 and β = y1 −y
2
may establish a family of inequalities between different Hamburger moment
sequences of different orders, namely
y +y 2
1 2 y2
y1
Mm 2+m ≤ M2m
(3.28)
M2m
1
2
2
1
for every m1 , m2 positive integers and for every y1 , y2 ∈ (−a, b).
We already knew a family of inequalities for a given moment sequence.
It is a result due to Dugué, see [5].
Proposition 3.8. Suppose that all the absolute moments, Mx , of order x of
a certain probability measure exist. Then
Mm1 y1 +m2 y2 ≤ (My1 )m1 (My2 )m2
(3.29)
for every positive integers m1 , m2 such that m1 + m2 = 1.
Proof. See [5].
Remark 3.6. Observe how the inequalities in (3.28) are different from the
inequalities already found by Dugué. In fact, in (3.28) we have a family of
inequalities on different moment sequences of different orders, while in (3.29)
we just have a family of inequalities on different orders of the same moment
sequence.
36
Chapter 4
Complex positive definite
functions on strips
The aim of this chapter is to establish conditions under which integral representations for complex-variable positive definite functions exist and to figure
out when they are unique. In particular, integral representations for positive
definite functions of the complex variable ensure a high regularity for the
functions. Indeed, we will show that continuity on the imaginary axis —that
is, according to Widder’s theorem 2.6, an integral representation on the imaginary axis— implies analyticity on the corresponding connected component
of the codifference set on which a given function is positive definite. Another
purpose is to explore, in the complex settings, the problem of the extension
for positive definite functions according to its regularity.
4.1
Propagation of regularity
Here, we will present a generalization of Property 2.3 (propagation of regularity) for positive definite functions of the complex variable. First of all, let
us note some properties of co-positive definite functions that will be useful
for the next.
Let f be a complex positive definite function on a codifference set such
that G(y) = f (iy) is a real-variable co-positive definite function because of
Proposition 2.5 and such that G(y) is a continuous function. By Proposition
3.4 the function G(y) = f (iy) is analytic in its interval of absolute convergence, say I, whenever I contains the origin. Remark that G(y) = f (iy) is
analytic in I even when I does not contain the origin. In fact, G(y) is such
37
that
+∞
Z
e−yt dµ(t)
G(y) =
(4.1)
−∞
and absolutely convergent in (a, b), with 0 < a < b without loss of generality.
Then, for every y0 ∈ (a, b) we have
Z
G(y) =
Since
+∞
lim
k
X
(−t)n e−y0 t
n!
−∞ k→∞ n=1
(y − y0 )n dµ(t).
k
X
(−t)n e−y0 t
lim (y − y0 )n = |e−yt | = e−yt
k→∞ n!
n=1
for some y0 ∈ (a, b); and since by hypothesis
Z +∞
e−yt dµ(t) < ∞,
G(y) =
y ∈ (a, b),
(4.2)
(4.3)
(4.4)
−∞
by the dominated convergence theorem, we can take the limit out of the
integral sign in (4.2), obtaining
G(y) = lim
k→∞
k
X
n=1
R +∞
−∞
(−t)n e−y0 t dµ(t)
(y − y0 )n .
n!
(4.5)
If the integrals in (4.5) are all convergent for y0 ∈ (a, b), they correspond to
the derivatives of G in y0 for Leibniz’s rule 3.3, and we can conclude that
G(y) is analytic in (a, b). In order to do this consider α and β such that
y0 < α < b and a < β < y0 . We have that
Z +∞
Z 0
n −y0 t
|(−t) e
|dµ(t) =
|tn e−(y0 −α)t |e−αt dµ(t)+
(4.6)
−∞
−∞
Z +∞
|tn e−(y0 −β)t |e−βt dµ(t).
(4.7)
0
The two integrals are convergent because the integrands are the product of
an integrable function and a bounded function respectively on [−∞, 0] and
[0, +∞].
Thus, G(y) = f (iy) is analytic on I and by analytic continuation it can
be extended to the whole strip of the complex plane S = {z ∈ C : Im(z) ∈ I}
38
to a holomorphic function f (z), such that
Z +∞
f (z) =
eizt dµ(t),
z∈S
(4.8)
−∞
that is, such that f (z) is a complex-variable positive definite function on S.
As we already saw in Proposition 3.5, this fact was already known by
Dugué [5] in the case where the interval of absolute convergence of (4.14)
contains the origin and thus in the case that µ is a probability measure and
G(y) a moment generating function. This is in fact a well-known result in
probability theory.
The following statement is a strong consequence of the previous remarks
in the theory of positive definite functions of the complex variable.
Theorem 4.1. Let f be a complex-variable positive definite function on the
open strip S = {z ∈ C : a < Im(z) < b} with a, b ∈ R. If f is continuous on
i(a, b) = S ∩ Im(z), then f is analytic in S.
Proof. Since f (z) is positive definite on S, from Proposition 2.5 we know
that G(y) = f (iy) is a co-positive definite function on the open interval of
the imaginary axis (a, b) and is continuous here by hypothesis. Thus, by
Widder’s theorem 2.6 there exists a non-negative and σ-finite measure on R
such that
Z +∞
G(y) =
e−yt dµ(t)
(4.9)
−∞
and such that G(y) is analytic in (a, b) by virtue of the previous observation.
Obviously, for every fixed y ∈ (a, b) there exists a neighborhood of y, eventually very small, in which G —and thus f — is analytic. Therefore, the realvariable positive definite functions, obtained by setting Fy (x) = f (x + iy),
are all analytic in a neighborhood of the origin and by virtue of “propagation
of regularity” theorem 2.3, they are analytic on the whole lines iy of the complex plane for some y ∈ (a, b). We still cannot conclude that these analytic
real positive definite functions on the lines link continuously one to the other,
and thus that f (z) is analytic on S. However, we may easily overcome this
problem. In fact, from the previous digression, we know that G(y) has an
analytic extension to S, namely
Z +∞
g(z) =
eizt dµ(t)
(4.10)
−∞
Obviously, by virtue of the identity theorem for functions of the complex
variable, g(z) ≡ f (x + iy) for every y ∈ (a, b) and x ∈ R. Therefore, f (z) is
39
analytic in S and the assertion is proved.
Remark 4.1. Of course, the statement of Theorem 4.1 is still valid when dealing with complex positive definite functions on a codifference set S different
from a strip. In this case, if f is continuous on every connected component
of S ∩ Im(z), then f will be holomorphic on every connected component of
S containing S ∩ Im(z).
We just proved that a complex-variable positive definite function on a
strip is either discontinuous or holomorphic. In light of this, in the next
section we will study when a complex positive definite function benefits of
an integral representation.
4.2
Integral representations
We begin by stating two well-known notions from measure theory.
Definition 4.1. Let µ, ν be two measures on the same measurable space,
then µ is absolutely continuous with respect to ν if µ(A) = 0 for every measurable set A such that ν(A) = 0. In this case we write µ ν. Absolutely
continuity is a reflexive and transitive, but not symmetric relation. Two
measures are equivalent if µ ν and ν µ.
Theorem 4.2 (Radon-Nikodym). Let µ and ν be two σ-finite and nonnegative measures on the same σ-algebra, with µ ν, then there exists a
non-negative and σ-measurable function f such that
Z
µ(A) =
f dν
(4.11)
A
for every set A in the σ-algebra.
Proof. See R. Ash [1].
We say that f is said the Radon-Nikodym derivative and denote it by
dµ/dν.
The next theorem shows that in case f is a holomorphic positive definite
function on a strip of the complex plane, we can construct a commutative
diagram where everything is well-behaved, in order to guarantee the existence
and uniqueness of an integral representation for f .
Theorem 4.3. Suppose f is a holomorphic complex function defined on the
horizontal strip S = {z ∈ C, a < Im(z) < b}, a, b ∈ R. Define Fy (x) =
f (x + iy) for x ∈ R and any y ∈ (a, b); and G(y) = f (iy) for y ∈ (a, b).
Then the following statements are equivalent:
40
1.a) f is a complex-variable positive definite function on S.
1.b) There exists a unique, non-negative and σ-finite measure µ on R such
that
Z +∞
eitz dµ(t),
∀z ∈ S.
(4.12)
f (z) =
−∞
2.a) Fy (x) is a positive definite function of the real variable x for some y ∈
(a, b).
2.b) There exists a unique, non-negative finite measure µy on R such that
Z
+∞
Fy (x) =
eitx dµy (t),
∀x ∈ R.
(4.13)
−∞
for some y ∈ (a, b).
3.a) G(y) is a co-positive definite function of the real variable y on the interval (a, b).
3.b) There exists a unique, non-negative and σ-finite measure µI on R such
that
Z +∞
G(y) =
e−yt dµI (t),
∀y ∈ (a, b).
(4.14)
−∞
Proof. Since f is holomorphic on S, we have in particular that Fy (x) is real
analytic on R and that G(y) is continuous on (a, b). The equivalence of 2.a
and 2.b follows from Bochner’s representation theorem 2.2 and the equivalence of 3.a and 3.b is consequence of Widder’s theorem 2.6. That 1.a implies
2.a and 3.a —and therefore 2.b and 3.b— is an immediate consequence of the
definitions of Fy and G and the conditions of positiveness or co-positiveness
assumed for f , Fy and G, see Proposition 2.5.
Direct calculation, see the beginning of Section 2.2, can be used to show
that 1.b implies 1.a.
We now show that 2.a implies 1.a. According to the hypothesis, Fy (x) =
f (x + iy) is positive definite and analytic on R for some y ∈ (a, b) and we
have from 2.b that
Z +∞
Fy (x) =
eitx dµy (t),
∀x ∈ R.
(4.15)
−∞
41
for some non-negative and finite measure µy on R. Then, according to theorems 3.5 and 3.6, there exists an extension Fy (z) of Fy (x) which is holomorphic on the strip SM = {z ∈ C : −α < Im(z) < β}, where α, β ∈ (0, ∞]
are maximal with this property, and presents singularities at both points
−iα and iβ, whenever they are finite. This extension admits the integral
representation
Z
+∞
eitz dµy (t),
Fy (z) =
∀z ∈ SM
(4.16)
−∞
and its uniqueness implies that Fy (z) = f (z + iy) whenever both sides of
the identity are defined. Since f is holomorphic on S and −iα and iβ are
singularities of Fy , we conclude that y − α < a < b < y + β. Therefore we
may write
Z +∞
f (z) =
ei(z−iy)t dµy (t)
(4.17)
−∞
Z +∞
eizt eyt dµy (t),
∀z ∈ S.
(4.18)
=
−∞
Defining µ(t) by
dµ(t) = eyt dµy (t)
(4.19)
we finally obtain
Z
+∞
f (z) =
eitz dµ(t),
∀z ∈ S.
(4.20)
−∞
for the non-negative and σ-finite measure µ(t). According to the RadonNikodym theorem, µ is absolutely continuous with respect to µy and eyt is
the corresponding Radon-Nikodym derivative. Moreover, from (4.19) follows
that µ and µy are equivalent measures, in the sense of Definition 4.1, for
every y ∈ (a, b). We finish the proof by showing that 3.a implies 1.b. Since,
according to the hypothesis, G(y) = f (iy) is continuous and co-positive
definite on (a, b) we have from 3.b that
Z +∞
G(y) =
e−yt dµI (t),
∀y ∈ (a, b)
(4.21)
−∞
for some non-negative and σ-finite measure µI . Then, by virtue of what
we observed in the beginning of Section 4.1, Gy may be holomorphically
42
extended to the set S = {z ∈ C : a < Im(z) < b} by the function
Z +∞
g(z) =
e−zt dµI (t).
(4.22)
−∞
Since G(y) = f (iy), the uniqueness of this extension implies that g(z) =
f (iz), ∀z ∈ S. Therefore, we must have
Z +∞
f (z) =
eizt dµI (t),
∀z ∈ S.
(4.23)
−∞
Defining µ(t) = µI (t) we finally obtain
Z +∞
f (z) =
eizt dµ(t),
∀z ∈ S.
(4.24)
−∞
Remark 4.2. For every y ∈ (a, b) the measures µy in the conditions of Theorem 4.3 are equivalent between them. In fact, from statement 2 of Proposition
2.4 with a = 0 and b = y, we have that
|f (iy)|2 ≤ f (i(y + β))f (i(y − β))
for y, β ∈ R such that iy, i(y ± β) ∈ (a,Rb). Using that for every y ∈ (a, b),
+∞
by Bochner’s theorem f (iy) = Fy (0) = −∞ dµy (t) for some finite and nonnegative Borel measure, µy , on R, we have
Z
+∞
−∞
2 Z
dµy (t) ≤
+∞
Z
+∞
dµy+β (t)
dµy−β (t)
−∞
(4.25)
−∞
for every y, β ∈ R such that iy, i(y ± β) ∈ (a, b). Then, whenever µy+β or
µy−β vanish on some Borel set B, µy (B) must be zero too, implying that
µy µy±β . Since y, β are arbitrary points, the assertion is proved.
Remark 4.3. If two measures are equivalent according to Definition 4.1, whenever one of the two is finite the other one need not be finite too. For example,
Lebesgue measure λ on R and the Normal distribution γ are mutually absolutely continuous and
Z +∞
1
2
γ(B) = √
e−t /2 dλ(t)
2π −∞
for every Borel set B. However, it is well-known that Lebesgue measure is
43
σ-finite and not finite, while the Normal distribution is finite since it is a
probability measure.
This is in general what occurs in Theorem 4.3 for the measures µ and
µy for some y ∈ (a, b), where the µy are all finite measures by virtue of
Bochner’s theorem and µ is initially just σ-finite. Only when the interval
(a, b) contains the origin can we state that µ and µy are finite for every
y ∈ (a, b), and consequently that the maximal strip of the complex plane,
S, on which we extend the positive definite function contains the whole real
line.
We just proved that a complex-variable positive definite function on a
strip is either discontinuous and does not admit an integral representation or
is holomorphic and has a unique integral representation. This is the statement of the next Corollary.
Corollary 4.1. Let f be a complex-variable positive definite function on the
open strip S = {z ∈ C : a < Im(z) < b} with a, b ∈ R. If f is continuous on
i(a, b) = S ∩ Im(z), then f has a unique integral representation on S,
Z +∞
f (z) =
eizt dµ(t),
∀z ∈ S
(4.26)
−∞
for the non-negative and σ-finite Borel measure µ.
Proof. From Theorem 4.1 the assumptions of Theorem 4.3 are verified, thus
proving the result.
Example 4.1. Here some examples of what happens when, given an analytic
positive definite function on the real axis —that is, an analytic characteristic
function— we extend it to a maximal strip of the complex plane according
to Theorem 4.3.
1. The real-variable positive definite function
function of the probability distribution
1
=
1 + x2
Z
e−|t|
,
2
+∞
−∞
eixt
1
1+x2
is the characteristic
that is
e−|t|
dt.
2
By analyticity it is possible to extend this function holomorphically to
the non-trivial strip S = {z ∈ C : −i < Im(z) < i} so that on the
imaginary axis we have
Z +∞
−|t|
1
−yt e
dt.
=
e
1 − y2
2
−∞
44
1
is
1−y 2
e−|t|
distribution 2
That is,
the moment generating function of the probability
and is co-positive definite.
2. The real-variable positive definite function cos(x) is the characteristic
function of the probability distribution δ(t − 1) + δ(t + 1), that is
Z +∞
cos(x) =
eixt [δ(t − 1) + δ(t + 1)]dt.
−∞
The holomorphic extension of the analytic function cos(x), cos(z), is
an entire function; this is the case S ≡ C. On the imaginary axis
Z +∞
e−yt [δ(t − 1) + δ(t + 1)]dt
cos(iy) = cosh(y) =
−∞
is the moment generating function corresponding to the probability
distribution δ(t − 1) + δ(t + 1), which is co-positive definite.
3. As we know from probability theory, it is always possible to define the
characteristic function of a probability distribution. However, the moment generating function may not exist, since the moments of a probability distribution do not necessary all exist. In this case, the derivatives at zero of the characteristic function do not exist all. Consider for
1
example the well-known Cauchy distribution π(1+t
2 ) . Its characteristic
function
e−|x|
2π
of course does not posses all the derivatives at zero. With respect to
Theorem 4.3 this is the trivial case S ≡ R.
4.3
The extension problem
Let us now present the well-known extension problem for positive definite
functions, first explicitly posed by M.G. Krein in 1940. If we assume that
a complex-valued function f defined on (−2a, 2a), a > 0, is called positive
definite if the inequality
m
X
ξj ξ k f (xj − xk ) ≥ 0
j,k=1
45
(4.27)
holds, whenever ξj ∈ C and xj ∈ (−a, a), the extension problem can be
stated as: Can every positive definite function f in (−a, a) be extended to a
positive definite function on R?
Theorem 4.4 (M. G. Krein’s extension theorem–1940). Any continuous positive definite function f on (−c, c) can be extended to a positive definite function on R.
Remark 4.4. By Bochner’s theorem 2.2 any such f is a Fourier-Stieltjes transform. That is, the extension admits an integral representation.
Krein also showed that the extension needs not be unique, and, by using
methods reminescent of those used in the classical moment problems, gave
several criteria for uniqueness of the extension. A year later A. P. Artjomenko
pointed out that the continuity assumption can be dropped, at the cost of
giving up at the existence of an integral representation by Bochner’s theorem.
Theorem 4.5 (A. P. Artjomenko-1941). Any positive definite function f on
(−c, c) can be extended to a positive definite function on R.
For a deeper digression on the extension problem for positive definite
functions we refer to [15, 17] and their corresponding references.
The next result is analogous to the previous theorems, but it is stated in
the complex setting.
Theorem 4.6. Let f be a complex positive definite function in an open codifference set S =codiff(Ω). On every connected component, iI, of S ∩Im(z) on
which f is continuous, there exists a unique Borel non-negative and σ-finite
measure µI on R such that
Z +∞
f (z) =
eizt dµI (t),
(4.28)
−∞
for all z = x + iy ∈ C such that y ∈ I and x ∈ R. That is, f can be extended
to strips of the complex plane SI = {z ∈ C : Im(z) ∈ I} where it is positive
definite and holomorphic.
Proof. Suppose that f is a complex-variable positive definite in the open
codifference set S and that f is continuous on the connected component iI of
S ∩ Im(z). From Theorem 4.1 f is holomorphic on the connected component
on S containing iI, say it S̃I . Therefore, on every S̃I , the functions defined by
Fy (x) = f (x + iy) are analytic positive definite functions of the real variable
for some y ∈ I. Thus, by Krein’s extension theorem 4.4 they can be extended
to the horizontal lines of the complex plane L(y) = {z = x + iy ∈ C : x ∈ R}
46
as analytic and positive definite functions. However, we still cannot conclude
that these functions defined on the lines link continuously one to the other,
and thus that f (z) is an analytic positive definite function on the whole strip
SI = {z ∈ C : Im(z) ∈ I} of the complex plane. On the other hand, as we
did in the proof of Theorem 4.1 and saw in the beginning of Section 4.1, the
function G(y) defined by G(y) = f (iy) has an analytic extension, g(z), to
the strip SI , namely
Z +∞
eizt dµI (t)
z ∈ SI .
(4.29)
g(z) =
−∞
Therefore, by virtue of the identity theorem for functions of the complex
variable, we have that g(z) ≡ f (z) on SI .
If we drop the hypothesis of continuity in Theorem 4.6 the result is rather
weak. In fact, we have to give up on integral representations, analyticity and
uniqueness of the extensions. However, the condition of positive definiteness
still can be extended to the whole strip SI , but just by lines.
Theorem 4.7. Let f be a complex positive definite function on an open
codifference set S =codiff(Ω). For every connected component, iI, of S ∩
Im(z), the real-variable functions Fy (x) = f (x + iy) are positive definite on
the horizontal lines L(y) = {z = x + iy ∈ C : x ∈ R}, for every fixed y ∈ I.
Proof. On the connected component of S containing iI = S ∩Im(z), Fy (x) =
f (x + iy) is a real-variable positive definite function for some y ∈ I, then
for Artjomenko’s extension theorem 4.5 Fy (x) can be extended to a positive
definite function on the line L(y) = {z = x + iy ∈ C : x ∈ R}. Since y is
arbitrary in I we complete the proof.
Remark 4.5. A priori, the real-variable functions Fy (x) do not continuously
link one to the other, do not benefit of integral representations and the
extensions are not unique. That is, without further assumption of regularity,
the extension of a complex positive definite function from codifference set to
strips is valid only by lines and is not univocally determined.
These results and remarks still do not prove, but strongly suggest, that
in the complex setting it may only make sense to consider positive definite
functions on strips of the complex plane, and that the regularity of these
functions establish the existence and eventually the uniqueness of an integral
representation. These results are not sufficient to prove our conjecture. In
fact, as we saw in Section 2.2.1 there exist codifference sets, as for example
S2 in Figure 2.1, that is not connected and some of its component do not
47
intersect the imaginary axis, that is we cannot apply Theorem 4.6 and not
even Theorem 4.7. In the future, may be interesting to understand if even
in these cases we can state something similar to the previous Theorem 4.3,
4.1, 4.6, 4.7. Another open question remains: the characterisation of the
poles of a complex-variable positive definite function. From a first analysis,
it seems that poles can only be located on the imaginary axis and that the
order of a pole may indicate the positive definite nature of the function on a
neighboring strip.
Example 4.2. As an example we refer to the function f (z) = cosh(1 πz ) . This
2
function is positive definite in any horizontal strip of the form
sn = S(∞, 4n − 1, 4n + 1) = {z ∈ C : (4n − 1)i < z < (4n + 1)i, n ∈ Z}.
In fact, f admits the integral representation
Z +∞
1
1
eizt
dt
πz =
cosh( 2 )
cosh t
−∞
(4.30)
on the strip s0 = S(∞, −1, 1) = {z ∈ C : |Im(z)| < 1}, which implies that
it is positive definite on s0 . However, since f is periodic of period 4i must
be positive definite in every strip sn , even though the integral representation
(4.30) is divergent outside s0 .
48
Chapter 5
Bibliography
[1] R.B. Ash and C.A. Doléans-Dade. Probability and Measure Theory.
Harcourt/Academic Press, 2000.
[2] T.M. Bisgaard and Z. Sasvâari. Characteristic Functions and Moment
Sequences: Positive Definiteness in Probability. Nova Science Pub Incorporated, 2000.
[3] A. Devinatz. On infinitely differentiable positive definite functions. Proceedings of the American Mathematical Society, 8(no. 1):pp. 3–10, 1957.
[4] W.F. Donoghue. Distributions and Fourier transforms. Pure and Applied Mathematics. Elsevier Science, 1969.
[5] D. Dugué. Analycité et convexité des fonctions caractéristiques. Annales
de l’I.H.P, 12(no. 1):pp. 45–56, 1951.
[6] R. R. Goldberg. Fourier Transforms. Cambridge University Press, 1961.
[7] Buescu J. and Paixão A. C. A linear algebric approach to holomorphic
reproducing kernels in Cn . Linear Algebra Appl., 412(no. 2-3):pp. 270–
290, 2006.
[8] Buescu J. and Paixão A. C. On differentiability and analyticity of positive definite functions. J. Math. Anal. Appl., 375(no. 1):pp. 336–341,
2011.
[9] Buescu J. and Paixão A. C. Real and complex variable positive definite
functions. São Paulo Journal of Mathematical Sciences, 6(no. 2):pp.
1–15, 2012.
49
[10] Buescu J. and Paixão A. C. Complex variable positive definite functions.
Complex Variables and Operator Theory DOI 10.107/s11785-013-03191., 2013.
[11] S. Lang. Complex Analysis. Graduate Texts in Mathematics. Springer,
1999.
[12] E. Lukacs. Characteristic functions. Griffin’s statistical monographs &
courses. Hafner Pub. Co., 1960.
[13] J.S. Rosenthal. A first look at rigorous probability theory. World Scientific Publishing Company Incorporated, 2006.
[14] Z. Sasvári. Positive definite and definitizable functions. Mathematical
topics. Akademie Verlag, 1994.
[15] Zoltan Sasvari. The extension problem for positive definite funnctions.
a short historical survey. Operator theory: Advances and Applications,
163:pp. 365–379, 2005.
[16] J.A. Shohat, J.D. Tamarkin, and American Mathematical Society. The
Problem of Moments. Mathematical surveys and monographs. American
Mathematical Society, 1943.
[17] James Stewart. Positive definite functions and generalizations, an historical survey. Rocky Mountain Journal of Mathematics, 6(no. 3), 1976.
[18] D. V. Widder. Necessary and sufficient conditions for the representation of a function by a doubly infinite laplace integral. Submitted for
publication, 1933.
[19] D.V. Widder. The Laplace Transform. Dover Books on Mathematics
Series. Dover Publications, Incorporated, 2010.
50