Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
405-line television system wikipedia , lookup
Rectiverter wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Integrating ADC wikipedia , lookup
Analog television wikipedia , lookup
Peak programme meter wikipedia , lookup
Radio transmitter design wikipedia , lookup
Wave interference wikipedia , lookup
Quantum electrodynamics wikipedia , lookup
Phase-locked loop wikipedia , lookup
Index of electronics articles wikipedia , lookup
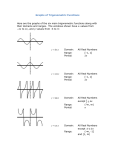
Towards Sub-ppm Shot-to-shot Amplitude Stability of SwissFEL Resonant Kicker Martin Paraliev, Christopher Gough Accelerator Concepts and Development Paul Scherrer Institute 5232 Villigen PSI, Switzerland [email protected] Abstract—The development of a fast electron beam switching system for Swiss Free Electron Laser[1] (SwissFEL) is in its final phase. Two high stability resonant kicker magnets followed by a septum should separate two closely spaced electron bunches (28 ns apart) and send them to two separate undulator lines. Extremely high shot-to-shot amplitude stability will ensure minimal shot-to-shot variation of the generated X-ray pulses. As previously reported, the prototype system met the project requirements, reaching 3 ppm rms shot-to-shot amplitude stability[2]. During final system optimization better than 1 ppm rms shot-to-shot amplitude stability (1e-6) has been achieved. Keywords— Electron beam switching; XFEL; Kicker magnet; Low amplitude jitter I. INTRODUCTION The SwissFEL is a linac based X-ray Free Electron Laser [3] user facility under construction at the Paul Scherrer Institute (Switzerland). It will be capable of producing short (2 to 20 fs) and high brightness X-ray pulses (up to 6·1035 photons·mm-2·mrad-2·s-1) covering the spectral range from 1 to 70 Å [4]. To increase the facility efficiency the main linear accelerator will operate in two bunch mode. At beam energy of 3 GeV the two closely spaced electron bunches (28 ns apart) will be separated by a precision beam switching system [5]. Two high stability resonant deflecting magnets (kickers) will create the initial vertical beam deflection (~1.8 mrad) and then a Lambertson septum magnet will give the final horizontal deflection (2°). The two separated bunches travel to two different beamlines which will feed simultaneously two experimental stations. In order to ensure high X-ray amplitude and pointing stability, the deflection system has to operate with very low jitter. During the development, the measurements of the prototype system showed amplitude shot-to-shot stability of 3 ppm (3·10-6) rms, far below the value needed for the accelerator project [2]; this opens possibilities to separate multiple closely spaced electron bunches with low jitter. II. MOTIVATION Using multiple bunches in a single RF pulse is very attractive way to increase efficiency of a linear accelerator but it always needs certain engineering compromise. From one hand, the Radio Frequency (RF) accelerating pulse is not with constant amplitude and the closer the electron bunches are the more similar accelerating conditions they see. Theoretically the time separation between bunches could be reduced down to the RF period of the accelerating structures. In our case, due to the usage of several different RF acceleration frequencies, the smallest separation is limited down to the period of the highest common sub-harmonic frequency (7 ns). From the other hand, the closer the electron bunches are the more difficult is to separate them with the necessary pointing stability. In this respect the kicker magnets are the most demanding element in such beam switching system. They have to provide reliably fast changing and highly repetitive magnetic field. The practical dimensions of lumped parameters kicker magnets put a lower limit to their inductance. This, combined with the requirement for fast change of the magnetic field pushes the operating voltages to tens of kilovolts making standard pulsed kicker magnets a demanding engineering problem. A novel resonant approach is taken in order to have more effective (lower operating voltage) and better controlled (higher stability) current through the kicker magnets. III. AMPLITUDE STABILITY A. Measurement system A dedicated high resolution balancing measurement system was developed to measure the pulse-to-pulse amplitude stability of the resonant kickers. A sensing loop, magnetically coupled to the resonator, is used to pick up fraction of the kicker’s magnetic field, creating an electrical signal Um proportional to the time derivative of the coupled magnetic flux Φ m. 𝑈𝑚 = − 𝑑Φ𝑚 𝑑𝑡 (1) In steady state regime the magnetic field in the resonator is a sinusoidal function with respect to time t as well as the coupled magnetic flux Φm(t) Φ𝑚 (𝑡) = Φ0 sin(𝜔0 𝑡 + 𝜑) (2) were ω0 is the angular resonance frequency of the resonator and φ is initial phase angle. Substituting the magnetic flux in eq. (1), for the voltage of the pick-up signal we have: 𝑈𝑚 = −𝜔0 Φ0 cos(𝜔0 𝑡 + 𝜑) (3) Since the resonant frequency ω0 is constant, the pick-up signal is proportional to the resonator’s magnetic field and it is used to directly monitor the field in the magnet. In the measurement system a high stability DC reference is subtracted from the picked up signal and the difference is amplified, limited and digitized. The system gives high resolution amplitude measurement around the peak of the sine wave but has limited dynamic range (about ±100 ppm). Programming the DC reference signal makes possible to adapt the system to the actual working point of the magnet. In addition, a full range measurement is also implemented using fast 16 bit ADC (resolution 15 ppm). This measurement is used for global amplitude monitoring and calibration of the high resolution measurement system [6]. B. Calibration of high resolution measurement system The sine wave amplitude of the magnetic field around magnet’s working point is continuous monotonic function of the magnets’ driver charging voltage Uch. Using small changes of Uch around the working point (±1%) and the full range measurement system, the response of the kicker system could be linearized and reduced to a single linear transfer coefficient k. A high stability programmable voltage regulator gives Uch with ppm resolution. Based on this linearization, a precise amplitude step (in this case ±50 ppm) could be programmed to calibrate the high resolution measurement system. To characterize the measurement systems’ performance, two identical and fully independent high resolution measurement systems were operated simultaneously. Figure 1 shows the response of the two systems to ±50 ppm calibration amplitude steps. Fig. 2. Running standard deviation of the amplitude of 100 consequent pulses measured simultaneously by high resolution measurement system A and B. D. Noise floor estimation Analyzing statistically the results of the two independent measurement systems, we can separate the noise contributions of the signal and the high resolution measurement. From variance properties it is known that the variance of normally distributed random value does not depend on the expected value. Using this we could leave the expected value of the amplitude out of the equations and work only with the noise contributions. The noise of two independent measurement systems is represented with A and B, and K represents the kicker noise, with their respective variances𝜎𝐴2 , 𝜎𝐵2 and𝜎𝐾2 . From the two independent high resolution measurement systems, we have the measured noise MA and MB with their respective variances 2 2 𝜎𝑀𝐴 and𝜎𝑀𝐵 . Using MA and MB we can create a mean value MC: 𝑀𝐶 = 𝑀𝐴+𝑀𝐵 (4) 2 Returning to Figure 2, we can calculate its standard deviation 𝜎𝑀𝐶 for the same period as used to find 𝜎𝑀𝐴 and 𝜎𝑀𝐵 ; this gives 𝜎𝑀𝐶 = 1.29 ppm. The measured noise MA and MB are sums of the kicker noise K and the noise of the respective measurement system or: Fig. 1. Response of high resolution measurement system A and B to calibration steps of ±50 ppm. C. Measurement results Figure 2 shows the measured running standard deviation of the amplitude of 100 consequent pulses. The averaged values for the shown period are 𝜎𝑀𝐴 = 1.52 ppm and 𝜎𝑀𝐵 = 1.61 ppm measured by system A and B respectively. The kicker was running at 50 Hz repetition rate synchronized with the mains frequency. The time period shown in Figure 2 is about 10 seconds. 𝑀𝐴 = 𝐴 + 𝐾 (5) 𝑀𝐵 = 𝐵 + 𝐾 (6) We can express the variances of MA, MB and MC as following: 2 𝜎𝑀𝐴 = 𝑉𝑎𝑟(𝑀𝐴) = 𝑉𝑎𝑟(𝐴) + 𝑉𝑎𝑟(𝐾) (7) 2 𝜎𝑀𝐵 = 𝑉𝑎𝑟(𝑀𝐵) = 𝑉𝑎𝑟(𝐵) + 𝑉𝑎𝑟(𝐾) (8) 2 𝜎𝑀𝐶 = 𝑉𝑎𝑟 ( 𝑀𝐴+𝑀𝐵 2 )= 𝑉𝑎𝑟(𝐴) 4 + 𝑉𝑎𝑟(𝐵) 4 + 𝑉𝑎𝑟(𝐾) (9) From these 3 independent equations we can express the variances of each system as following: 2 𝜎𝐾2 = 2𝜎𝑀𝐶 − 2 𝜎𝑀𝐴 2 − 2 𝜎𝑀𝐵 2 𝜀𝜑 = | (10) 2 𝜎𝐴2 = 𝜎𝑀𝐴 − 𝜎𝐾2 (11) 2 𝜎𝐵2 = 𝜎𝑀𝐵 − 𝜎𝐾2 (12) Using the measured standard deviations 𝜎𝑀𝐴 , 𝜎𝑀𝐵 and 𝜎𝑀𝐶 we get: 𝜎𝐾 = 0.94 ppm (13) 𝜎𝐴 = 1.19 ppm (14) 𝜎𝐵 = 1.30 ppm (15) This puts the pulse-to-pulse amplitude stability of the kicker just below unity ppm border. cos(0) | (16) In our case the electron bunches arrive at the positive and negative crest of the sinusoidal current of the resonant kicker (with 180° separation). Using the measured phase noise value we can calculate the phase noise driven amplitude error 𝜀180: 𝜀180 = |1 − cos(180° + 24 ∙ 10−3 °)| = 8.7 ∙ 10−8 (17) Due to the fact that at the crest cosine derivative changes sign the error function’s distribution is folded Gaussian. The calculated value is much smaller than the rest of amplitude instability and could be neglected. For possible future use with more than two electron bunches at the positive and negative peaks, we consider an additional bunch either at 45° or at 90°, and calculate the phase driven amplitude noise using the measured phase stability. IV. PHASE STABILITY A. Measurement The phase performance of the prototype kicker was measured using a RF diode mixer. Figure 3 shows amplitude envelope and the phase change during the RF pulse. At 57 µs after the RF pulse start, the maximum amplitude is reached in the resonator. The phase is measured at this time. After that point the voltage droop in the driver’s storage capacitors becomes larger than the resonance amplitude growth and the resonator amplitude droops slightly. cos(φ)−cos(𝜑+∆𝜑) 𝜀45 = | 1 √2 − cos(45° + 24 ∙ 10−3 °)| = 295 ppm (18) 𝜀90 = |0 − cos(90° + 24 ∙ 10−3 °)| = 417 ppm (19) The amplitude noise at these points is still too high to fulfill the stability requirements for the present accelerator project. Since the measured level of phase noise is more than sufficient for the current project with two bunch operation, the phase measurement was not fully optimized and the result could be limited by the measurement noise floor of the setup. There is some evidence (discussed in the next paragraph) that suggests the resonator phase noise alone is lower than the measured value. This should be further investigated because it could open possibilities for stable multi-bunch separation. V. LID VIBRATION Fig. 3. Amplitude and phase waveforms of the RF mixer measurement of a single pulse. Calibration of the setup was done using 100 ps delay element that corresponded to 1.8 mV shift in the phase plot. The measured rms voltage noise was 64 µV corresponding to 3.6 ps or 24 millidegree (6.6 ∙ 10−5 relative to the resonator sine wave period). B. Phase noise driven amplitude instability The relative single cycle phase noise driven amplitude error εϕ can be expressed as ratio of the amplitude change due to the phase misalignment Δϕ at the working angle ϕ and the maximum deflection. Experimenting with the prototype we found that driving the resonator about 16 ppm above the resonance gives a minimum value of amplitude jitter. Some amplitude instability was caused by the fan air cooling. Even though the air velocity was relatively low, the turbulent air passing through the resonator tank caused the lid to vibrate. It was expected this would cause detuning due to the lid displacement and respectively increase of the amplitude jitter off resonant frequency. Nevertheless this would not explain the frequency deviation from resonance for the minimum of amplitude jitter. It was discovered that the lid displacement modulates significantly the resonator’s Q-factor as well, providing a second mechanism for amplitude change. Using defined lid displacement steps the detuning and the losseffect were measured and modeled. On Figure 4 the dashed line describes the expected amplitude jitter in function of running frequency, combining the effects of frequency detuning and Q-factor change due to the lid displacement. It predicts a minimum at a frequency about 22 ppm above resonance. At that frequency the two effects should completely cancel out, zeroing the sensitivity to lid vibration. This model is predicting qualitatively correctly the direction of frequency shift but not quantitatively the frequency at which we measured ∆𝜑 minimum jitter value, indicated by the vertical dotted line (at ~16 ppm). Another source of amplitude jitter is the low frequency electrical phase noise of the driver electronics for exciting the resonator. In Figure 4, the dash-dot line indicates the expected phase noise driven amplitude jitter in function of running frequency that clearly has its minimum aligned with the resonance frequency (zero deviation). The two noise sources (one mechanical and the other electrical) are uncorrelated and could be summed in quadrature (the result is approximate in the vicinity of the points where the derivatives of the sensitivity functions change sign due to the folded Gaussian error distribution) 2𝜋 = ∆𝑓 𝑓0 𝑡𝑓0 (22) For one period 𝑡 = 𝑓0 −1 the relative phase change equal to the relative frequency deviation ∆𝑓 𝑓0 ∆𝜑 2𝜋 is or finally for the one cycle relative phase stability we have: ∆𝜑 2𝜋 ∆𝑓 = ( ) = 6 ∙ 10−8 𝑓0 𝐸 (23) This then suggests that the inherent resonator phase noise alone is much lower than the directly measured value. VI. CONCLUSION Fig. 4. Amplitude jitter as a function of frequency deviation from resonance. The continuous line in Figure 4 shows the combined effect of the two noise sources. Fitting the relative amplitude of the ∆𝑓 two noise sources in Figure 4 (vibration ( ) = 8 ∙ 10−8 rms ∆𝑓 𝑓0 𝑉 and electrical ( ) = 6 ∙ 10 𝑓0 𝐸 −8 rms) we get very close approximation of the measured amplitude jitter function of frequency, indicated with triangles. The lid displacement and the phase noise of the resonator could be estimated using the fitted relative noise amplitudes and the measured sensitivities. For the lid rms displacement we have: The development of a high stability resonant kicker system for SwissFEL is in its final phase. The currently measured amplitude shot-to-shot stability after removing the noise contribution of the measurement system is just below 1 ppm rms. This result is well within the requirement for the present accelerator project. The measured value of the relative single cycle phase stability is6.6 ∙ 10−5 . This phase stability level is enough for the currently planned two bunch operation mode but it is still not good enough for 3 or more bunch separation. Mastering of such high stability system would open possibilities for future multi-bunch operation. Mechanical vibration was found to contribute strongly to the overall amplitude jitter. The kicker’s amplitude sensitivity to lid translation (due to Q-factor change) was found to be 1.8 ppm/µm. A mathematical model was developed to explain the frequency dependence of the amplitude stability that agrees with the measured values. This model gave an indirect estimate of the single cycle relative phase stability of the resonator. The estimated value was much smaller than the directly measured one. This discrepancy needs further investigation because if the true phase noise value is proven to be this low a multi-bunch operation (more than two bunches) is fully feasible. REFERENCES [1] [2] ∆𝑓 𝜎𝑑 = ( ) ∙ 1.5 ∙ 10−2 = 1.2 ∙ 10−3 mm 𝑓0 𝑉 (20) For noisy harmonic oscillator 𝑠𝑖𝑛(2𝜋𝑓0 𝑡 + ∆𝜑) we can write the following relation between nominal frequency f0, frequency deviation Δf, phase change Δφ and time t. ∆𝜑 = 2𝜋∆𝑓𝑡 (21) Rewriting eq. (21) to separate the relative frequency and phase change we have: [3] [4] [5] [6] M. Paraliev, C. Gough, “Development of high stability resonant kicker for Swiss Free Electron Laser” Proc. 2013 IEEE Pulsed Power and Plasma Science Conference, pp. 1264-1267, San Francisco, CA, USA, doi:10.1109/PPC.2013.6627606, 2013 M. Paraliev, C. Gough, “Stability Measurements of SwissFEL Resonant Kicker Prototype”, Proc. 2014 IEEE International Power Modulator and High Voltage Conference, pp. 322-325, Santa Fe, NM, USA, doi: 10.1109/IPMHVC.2014.7287273, 2014 http://www.psi.ch/swissfel “SwissFEL Conceptual Design Report”, PSI, April 2012 https://www.psi.ch/swissfel/CurrentSwissFELPublicationsEN/SwissFEL _CDR_V20_23.04.12_small.pdf M. Paraliev, C. Gough, “Development of High Performance Electron Beam Switching System for Swiss Free Electron Laser at PSI”, IPMHVC 2012 M. Paraliev, C. Gough, “Comparison of High Resolution “Balanced” and “Direct conversion” Measurement of SwissFEL Resonant Kicker Amplitude”, 2015 IEEE Pulsed Power Conference, Austin, TX, USA, doi:10.1109/PPC.2015.7297016, 2015