Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
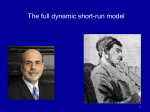
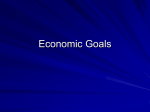
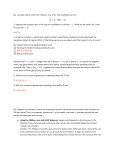
Model of closed economy with rational expectations∗ Miroslav Hloušek ∗∗ Faculty of Economics and Administration of Masaryk University in Brno, Department of Applied Mathematic and Informatics, Lipová 41a, 602 00 Brno, email: [email protected] Abstract This paper shows the way of solving linear difference model under rational expectations. The whole procedure is described in general form. The conditions for existence of a unique solution are summarized. The system is solved first for unstable part and then for stable part to get the final solution. There is made an application for macroeconomic model of closed economy. A reaction of agents in presence of shocks, when anticipated or not, is examined. Finally an influence of distinct types of Phillips curve on an adjusment process is discussed. The results are illustrated in the figures. Keywords rational expactations, closed economy model, Phillips curve 1 Motivation We have a model of closed economy with rational expectations. The model is characterised by four equations that are expressed in log-linearized form: (1) yt = αyt−1 − βrt + ωt (2) πt = γπt−1 + (1 − γ)Et πt+1 + δyt + χt (3) rt = it − Et πt+1 (4) it = κyt + φEt πt+1 + ξt , ∗ This paper has been worked as a part of research activities at the grant project of GA CR No. 402/02/0393. ∗∗ I thank Jaromı́r Beneš and Osvald Vašı́ček for useful comments and suggestions. 1 where yt is the output gap, rt is the real interest rate, it is the nominal interest rate, πt is the rate of inflation. All variables are expressed as a deviation from their equlibrium value. Et at+1 denotes conditional expectations.1 The parameters have these properites: α ∈ (0, 1), β > 0 , γ ∈ (0, 1), δ > 0 κ > 0 and φ > 1. Finally, ωt , χt and ξt represent exogenous shocks. The equation (1) relates aggregate spending to lagged values of output and the real interest rate; it corresponds to the aggregate demand equation. The equation (2) is an inflation-adjustment equation in which current inflation depends on lagged and expected future inflation and output. This equation (often referred to as Phillips curve or agregate supply) is based on multiperiod overlapping nominal contracts. The equation (3) is an identity for the real interest rate. The equation (4) is a monetary rule; the nominal interest rate (instrument of monetary policy) depends on current output and expected inflation. There occur three types of shocks: aggregate demand shock, agregate supply shock and monetary policy shock. 2 Solving The model’s equations will be put in the form: (5) AEt xt+1 = Bxt + C²t , where A, B are square matrices of coefficients that belong to vectors xt+1 and xt , C is matrix of coefficients of exogenous variables ²t . Et xt+1 = E(xt+1 |Ωt ), where E(.) is mathematical expectation operator, Ωt is the information set at t. We suppose that all agents have the same information at a given time. For existence of a non-expolosive solution it is required that the exogenous variables ²t do not “explode too fast”. This conditon in effect rules out exponential growth of the expectations of ²t . Vector xt contains two types of variables: predetermined and non-predetermined. The difference between them is rather important. A predetermined variable is known at time t, a non-predetermined is not.2 If the matrix A is regular, the process of solving is simpler. But more frequently, the matrix A is singular and therefore we use generalized Schur form to solve it. For square matrices A and B we find matrices S, T , Q, Z, where S and T are upper triangular matrices and Q and Z are unitary 1 2 Expectation of at+1 formed upon information available in period t. The labelling of these variables is xpred. and xunpred. respectively. t t 2 matrices that satisfy (6) QAZ = S QBZ = T. We made a linear transformation of vector xt : (7) Z x̃t = xt , This transformation implies that all elements in vector x̃t contain information that has influence on an element in xt . We substitute (7) into equation (5), premultiply by Q and use relations (6) as stated above.3 (8) AZ x̃t+1 = BZ x̃t + C²t , (9) QAZ x̃t+1 = QBZ x̃t + QC²t , (10) S x̃t+1 = T x̃t + D²t . The ratio of diagonal elements of matrices T and S produces eigenvalues of the system. λ(A, B) = T (i, i)/S(i, i) Blanchard-Kahn condition requires for existence of a unique solution, that the expectation of xt does not explode and that the number of eigenvalues outside the unit circle is equal to the number of non-predetermined variables. We order the system by the value of eignevalues and write equation (10) in well-arranged form. The part of vector x̃ that corresponds to stable eigenvalues (in the unit circle) is labelled s, the unstable part is labelled u. · ¸· ¸ · ¸· ¸ · ¸ S11 S12 st+1 T11 T12 st D1 ²t . = + 0 S22 ut+1 0 T22 ut D2 2.1 Solving of unstable part We write out the equations of unstable part for time into infinity and make backward iteration. The unique stable solution for ut is then4 (11) ut = −T22 −1 ∞ X −1 [T22 S22 ]k D2 ²t+k k=0 3 4 For expectation value of x̃ we will use x̃t+1 instead of Et x̃t+1 for simplicity. Here ²t+k represents expectation value. 3 2.2 Solving of stable part We write the stable part in the form of difference equation: (12) (13) S11 st+1 + S12 ut+1 = T11 st + T12 ut + D1 ²t st+1 = S11 −1 (T11 st + T12 ut − S12 ut+1 + D1 ²t ). We need to know the initial condition to solve it. We get it in the following way. The vector xt consists of predetermined and non-predetermined variables and with regard to transformation Zt x̃t = xt we can write · ¸ · ¸ " pred. # st xt Z11 Z12 = . Z21 Z22 ut xunpred. t For upper part Z11 st + Z12 ut = xpred. , t where ut has been solved and the value of xpred. is known in time t. It is t easy to get st = Z11 −1 (xpred. − Z12 ut ) t and substitute into (13) to get the whole trajectory of vector s. The final solution results from transformation xt = Z x̃t . 3 Application Recall the model of economy from chapter 1. Now we can examine a reaction of agents at presence of individual shocks.5 Due to shortage of space we pay our attention only to aggregate demand shock. So the value of ωt in our model is set ωt = 1, other variables are at their equilibrium level that is 0. To enhance transparency we display only path of output and inflation rate. The result can be seen in the Figure 1. First, we assume the shock is unexpected. Output and inflation both rise which is in accordance with economic intuition. The output returns more sharply than inflation. Both variables come back to their equlibria approximately after eleven periods. What happens when the shock is anticipated; it occurs e.g. in period 4. The agents expect rise of inflation in 5 For simulation we use these values of parameters: α = 0.8, β = 0.6, γ = 0.5, δ = 0.3, κ = 0.5, φ = 1.5. They are set with reference to [3]. 4 that period and therefore adjust contracts before the shock appears. The inflation gradually rises from the beginning of our simulation. The response of output is different. The gradual output decline is induced by the rise in real interest rate (not shown here). The demand shock has direct impact on output that rapidly rises in period 4. Both variables return to their initial levels in a similar manner as in the previous case. Unexpected shock output gap inflation 0.8 0.6 0.4 0.2 0 −0.2 0 2 4 6 8 Periods 10 12 14 16 Expected shock output gap inflation 0.8 0.6 0.4 0.2 0 −0.2 0 2 4 6 8 Periods 10 12 14 16 Figure 1: Aggregate demand shock – expected and unexpected Now we examine the impact of distinct types of Phillips curve on adjustment process. The base value of parameter γ was 0.5; lagged and expected inflation had the same influence. Figure 2 shows the response of output and inflation to demand shock for different values of the parameter γ. When γ = 0, the Phillips curve is forward-looking. Output and inflation rise and then smoothly return to their initial levels that reach in period 7. When γ = 1, the Phillips curve is backward-looking. The inflation little overshoots, reaches its peak in period 2 and then gradually returns to the equilibrium level. The response of output is more variable with decline below 5 the baseline. This shock displays a great deal of persistence. The variables are back at their equlibrium in period 16. Forward−looking Phillips curve output gap inflation 0.8 0.6 0.4 0.2 0 −0.2 0 2 4 6 8 Periods 10 12 14 16 Backward−looking Phillips curve output gap inflation 0.8 0.6 0.4 0.2 0 −0.2 0 2 4 6 8 Periods 10 12 14 16 Figure 2: Aggregate demand shock – different types of Phillips curve References [1] BLANCHARD, O.; KAHN, C. The Solution of Linear Difference Models under Rational Expectations, Econometrica, Volume 48, Issue 5 (Jul., 1980), 1305-1312 [2] KLEIN, P. Using the generalized Schur form to solve a multivariate linear rational expectations model, Journal of Economic Dynamics and Control, Volume 24, Issue 10, (Sept., 2000), 1405-1423 [3] WALSH, C. E. Monetary Theory and Policy. Cambridge: The MIT Press, 1998. ISBN 0-262-23199-9 6