Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Buck converter wikipedia , lookup
Electrical substation wikipedia , lookup
Stepper motor wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Stray voltage wikipedia , lookup
Opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Distribution management system wikipedia , lookup
Alternating current wikipedia , lookup
Three-phase electric power wikipedia , lookup
Surge protector wikipedia , lookup
Voltage optimisation wikipedia , lookup
Mains electricity wikipedia , lookup
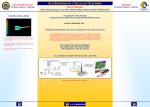
TECHNICAL RAPORT Motor protection, automation, local data display, data acquisition and transmission - Dispatching - The 10 Wastewater Pumping Stations in Eforie Sud (Agigea, Steaua de Mare, I.T.T.A., C.F.R. Bridge, T.B.C., Tuzla, Techirghiol, Schitu, Costinesti, “Students Camp” and “Pioneers Camp”) use n submersible pumps noted - P1, P2, P3 …Pn . Electrical pumps are chosen so that the maximum required output flow should be supplied by m of them, the others being kept as stand-by. Stand-by pumps are to insure the functionality of the system in case of system damage or during maintenance or repairing operations. The functioning sequence of the pumps depends on the water level in the sump. Thus, the height of the sump is divided into m+1 levels, meaning: L0 L1 L2 - stop level for all pumps - start level for the first pump - start level for the second pump Lm Lm+1 - start level for the “m” pump - alarm level (when the stand-by pumps, if available, must be activated). Initially, when the sump is almost empty, and the water has not yet reached the L1 level, none of the pumps works. If level L1 is attained, the P1 pump is activated. Should the evacuation debit insured by P1 leads to the decrease of water level in the sump, the pump continues to work until level L0 is reached, and then it stops. Should the input flow be higher than the P1 evacuation capacity and the level of the water increase further, when the L2 level is attained the P2 pump is started. Both P2 and P3 will continue to operate until the sump is empty, when the water will be under L0 level. The process repeats identically for the other pumps 1 too. L0 is a bit higher than the floor level of the sump, in order to avoid the dry functioning of pumps. (without water). Should the functioning time on one pump only (for which the water level of the sump is between L1 and L2) after a certain amount of time, i.e. 3 hours, the pump will be stopped and will be waiting for the water to reach L2 level in order to safeguard the self-cleaning speed of the waste pipes on the Pumping Stations at I.T.T.A., Costinesti Pioneers and C.F.R. Bridge. After that, the initial functioning algorithm will then be reinstated. If, accidentally, the system’s evacuation capacity is less than the input flow and the water reaches the maximum admitted level, Lm+1, the automation module, BAM, commands the functioning of the stand-by available pump (pumps) and activates both acoustic and visual alarm, warning the user that overflow is imminent. Input from the level transducer or sensors and the alarm start command go through MAC acquisition and command module. The same module shows the output flow and the state of the grid on/off/ failed. To detect L1, L2,…Lm+1 levels, switch floats can be used, specially designed to resist the aggressive environment in which they are functioning. Due to the material they are covered with (prolipropihlena), and also to their bulbous form, they reject any solid or fat deposits on their surface, thus, not requiring periodical cleaning. They are designed to be resilient to a large scale of temperature and impurities concentration, inherent to the exploitation of the system. As an alternative choice, for detecting the level of the sump, level transducers (submersible pressure sensor or ultrasonic) can be used. To insure the uniform use of the pumps (duty and stand-by) and for wear equalization, BAM measures the functioning time of each and activates first the ones that have operated for a shorter time. A submersible mixer is used to avoid mud deposits to crust on the floor of the sump and for preventing the sedimentary effects. The mixer activation will be automatically commanded by BAM, during the period pumps do not work, or when the water level of the sump is between the limits of L1 and L2 levels or manually, from the local panel. To force the evacuation of the noxious from the collecting sump and also from the inside of the pumping station, ventilation devices are used. These are programmed to function regularly, at moments dictated by the BAM module, and coordinated through MAC acquisition and command module. Before any intervention, the ventilation devices can be tuned on and off by the operator locally or from the dispatcher, bypassing the auto sequence. Should an accidental break down of the power supply network, a certain number of pumps shall be started, depending on the current water level from the sump. In this case the BAM module will command the sequential start of the pumps (within given settings), thus avoiding the occurrence of current peaks which could affect both the power line and the transformer. The stop pumps will similarly be done sequentially, within given settings. 2 BAM also controls the restarting number per hour for each pump so that this number shouldn’t be higher than the producer’s recommendations. An electrovalve will be installed on each pipe. The BAM module will command the electrovalves so that their closing will occur before the starting of the pumps and they will be opened after the starting of the pumps. The operator (locally or by the dispatcher) will be able to program through the BAM the opening degree for the open the close position. The control panel insures the protection of the pumps, mixer, electrovalves and ventilation devices. Thus, to increase both the functioning safety and the pumping system efficiency, protection and command multifunctional relays MPC are used. MPC equipment safeguards individually for each pump and mixer from the following usual cases of failure: Voltage protection: - reversal of phase rotation - phase failure - under voltage - over voltage - voltage unbalance Current protection: - current phase failure - undercurrent (idle running) - short-circuit - difficult motor starting - locked motor - current unbalance Special protection: - insulation fault (not for the mixer) - over temperature bearing - over temperature in the stator coils - leakage water in oil - water in the stator housing - leakage water in junction box - dewatering. The detection of any of the above mentioned malfunctions causes the motor to stop. Restarting may be attempted either automatically or manually. The motor cannot be restarted unless normal operating conditions are reached (power supply, insulation, temperature, humidity and water level) whether manually or automatically. MPC has independent keyboards and displays, which makes possible to program the working data, to check technological parameters and the type of failure. Both programmed parameters and the types of failure detected, 3 together with the time and date of occurrence are recorded in an nonvolatile memory. Aside from the types of failure detected together with the time and date of occurrence, MPC equipment will display the following data for each pump and mixer: - phase currents - phase voltages - total operation time. Protection and command of the electrovalves will be insured by the MPV device that will protect them against the following failures: - reversal of phase rotation - phase failure - under voltage - over voltage - current phase failure - short-circuit - overload - motor torque exceed - over temperature MPV will also allow the local open – close command of the electrovalve, local display and degree of electrovalve opening for both extreme positions, condition check of the electrovalve (open – close – damaged) as well as the type of detected failure. All detected malfunctions of pump, mixer, ventilation devices and grid status parameters together with possible failures on the internal communication network (that insure data and commands transfer between BAM and MPC or MAC module) are surveyed with the help of a special displaying device – MAF. These are installed in front of the electrical panel and centralise all global and individual data corresponding to installed protection and command and acquisition and command equipment. Thus MAF displays additional information as follows: - the state of pumps, ventilation devices, mixer and grid (on – off – failed) - the state of electrovalves (opened – closed – failed) - the type of detected failures - valve position for open and close - the current water level - the current output flow - phase voltage for each phase 4 - power supply frequency - currents for each phase - total operation time - phase shift between current and voltage on each phase (for pumps) - motor insulation resistance (for pumps) - active power (for pumps) - reactive power (for pumps) - power factor (for pumps) - active energy (for pumps) - reactive energy (for pumps) All electrical and non-electrical parameters of the pumping system, including the programmed values of the various devices comprising it, are transmitted via a MR modem and a SR radio station to a dispatching station. Thus the dispatching station controls totally and uninterruptedly any of the installed devices of the pumping stations with the help of the regulating programme. Installed automation and data transmittal equipment must be functional even in case of voltage failure of the power supply network. In this case the dispatching operator will be notified about failure or burglary detection. Data feed will be insured by radio for the dispatcher and every pumping station with the installation of modems and radio stations. The PC- mounted survey program is part of the SCADA programs family (Supervisory Control and Data Acquisition). It is conceived so that through the data transfer protocol it will verify the correctness of the data and to insure the integrity of the transferred information within the network. The program operates under Windows; it is user friendly and easily installable. It shows the pumping stations on the zone map. Upon selecting one of the stations, the program presents its detailed localisation and technological chart, monitoring the water level in the sump and the current state (on – off – unavailable) of the pumps, mixer, electrovalves, and grids. It also acquires electrical, energetically and technological parameters and displays then on request. Main features of the survey program: Notifying the dispatcher upon failure or burglary detection: Functioning failures detected by the protection and command equipment corresponding to pumps, mixer, electrovalves, and grids are sent from the stations to the dispatcher via the used communication channel. Types of failure detected are displayed and stored together with the date and hour of occurrence. The operator is compelled to confirm the received event; the time and date of the confirmation are also stored for future reference. The activation of burglary 5 sensors (upon unauthorized ingress) is interpreted as malfunctioning and the dispatcher is instantaneously informed (remote by exception). Inspection of pump, electrovalves and mixer operating parameters: Upon command from the operator or in automatic supervision (programmed time intervals), the dispatching station inspects the physical values collected by the acquisition and control and protection and control equipment. The values inspected are displayed on the operator’s screen and stored. Thus, the data may be of further use for the generation of reports. Automatic updating of data bases and report generating: All detected failures collected technological parameters and configuration data for protection and command or acquisition and command devices are stored and they can be easily accessed. Individual or global reports on malfunction in a certain time interval or the acquired physical values can be generated, based on stored data and information. Modification of MPC and MAC programmable parameters from the dispatcher station: From the dispatching point all configuration parameters for protection and command and acquisition and command installed devices can be read and modified. Each pump motor, mixer, electrovalve or ventilating device can be individually started or stopped from the dispatching point or the current date or hour of the clock with which the MAC and MPC are provided may be updated here as well. 6