Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Power electronics wikipedia , lookup
Magnetic core wikipedia , lookup
Phase-locked loop wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Crystal radio wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Regenerative circuit wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Valve audio amplifier technical specification wikipedia , lookup
Waveguide filter wikipedia , lookup
Radio transmitter design wikipedia , lookup
Rectiverter wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Standing wave ratio wikipedia , lookup
Audio crossover wikipedia , lookup
Surface-mount technology wikipedia , lookup
Nominal impedance wikipedia , lookup
Mechanical filter wikipedia , lookup
Linear filter wikipedia , lookup
Equalization (audio) wikipedia , lookup
Index of electronics articles wikipedia , lookup
Valve RF amplifier wikipedia , lookup
RLC circuit wikipedia , lookup
Zobel network wikipedia , lookup
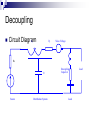
EMC Components and Filters When Capacitors aren’t …….. Rationale Many techniques for controlling EMI rely on some type of filtering Filters involve inductors, capacitors and resistors These components have strays associated with them, which alter their behaviour. See Shortcomings of Simple EMC Filters http://64.70.157.146/archive/old_archive/040126.htm Topics Components Capacitors Inductors Resistors Decoupling Filters Capacitors – Approx Frequency Ranges. 20 – 25nH Al Electrolytic 1F to 1F Tantalum Electrolytic 0.001F to 10F Paper and Metallised Paper. 1F to 1mF Mylar. 0.01 to 10F Polystyrene and Polycarbonate. 25pF to 0.25F Polypropylene. 47pF to 0.15F Mica and Glass. 1pF to 0.01F About 1.4nH 0.001 0.01 0.1 1 kHz 10 100 Low Loss Ceramic. 1000pF to 1F 1 10 100 Mhz 1000 Capacitors Have Equivalent Series Resistance (ESR) and ESL. Electrolytics require correct DC polarity Best capacitance to volume ratio High ESR (>0.1Ω) ESR increases with frequency High ESL Capacitors Electrolytics cont. Limited reliability and life Low frequency devices Ripple current limitations Parallel inductor improves high frequency (up to 25kHz) response Capacitors Paper and Mylar Lower ESR Higher ESL Uses Filtering Bypassing Coupling and noise suppression Capacitors Mica and Ceramics Low ESL and ESR Keep leads short Uses High frequency filtering Bypassing decoupling Capacitors Polystyrene and Polypropylene Low ESR Very stable C – f characteristic Mylar is a metalised plastic Polyethelyne terephthlalate DuPont trade name Capacitors Equivalent Circuit R C L Capacitors Effect of equivalent Circuit 6 C 0.1 10 R 0.02 9 L 1.5 10 Magnitude of Reactance & Impedance 100 10 1 0.1 0.01 1 10 3 100 1 10 3 1 10 Frequency (M Hz) Cap acitive Reactance Equivalent Circuit Imp edance 4 1 10 5 1 10 6 Inductors Equivalent Circuit Now a parallel resonance R will be low Winding resistance C will be low – winding capacitance Inter Inductors Effect of equivalent circuit 1 10 12 C 100 10 3 L 50 10 R 0.02 Magnitude of Reactance & Impedance 8 1 10 7 1 10 6 1 10 5 1 10 4 1 10 3 1 10 100 Frequency (kHz) Inductive Reactance Equivalent Circuit Impedance 1 10 3 1 10 4 Inductors Strays give a resonance that is quite sharp. R and C are low Above resonance inductor looks capacitive Air cored coils are large Produce unconfined fields Susceptible to external fields Solenoid has infinite area return path Inductors Ferromagnetic coils also sensitive to external fields own field largely confined to core Smaller than air cored devices Permeabiity increase by factors > 10000 Saturate if a DC is present Air gap reduces this effect Inductance lowered Inductors Ferromagnetic coils Core material depends on frequency LF – Iron Nickel Alloys HF – Ferrites Can be noisy caused by magnetostriction in laminations of core RF chokes tend to radiate Shielding becomes necessary Resistors Equivalent Circuit Parallel RC Resonance C will generally be low L comes from leads and construction wirewound Resistors 3 Effect of Equivalent Circuit 6 C 0.001 10 R 1000 6 L 1 10 Magnitude of Reactance & Impedance 1 10 100 10 1 0.1 1 10 3 100 1 10 Frequency (kHz) Equivalent Circuit Impedance 1 10 4 1 10 5 Resistors As frequency increases resistor begins to look inductive Wirewound Highest inductance Higher power ratings Use for low frequencies Resistors Film Type Carbon or Metal Oxide films Lower inductance Still appreciable because of meander line construction Lower power ratings Resistors Composition Usually Carbon Lowest Inductance Mainly Leads Low power capability C around 0.1 to 0.5pF Significant for High values of R Normally neglect L and C except for wirewound Decoupling Power rails are susceptible to noise Particularly to low power and digital devices Caused by common impedance, inductive or capacitive coupling Decouple load to ground Use HF capacitor Close to load terminals Decoupling Circuit Diagram L RT T Noise Voltage Rs CT Source Distribution System Decoupling Capacitor Load Load Decoupling Components of Transmission System form a Transmission Line System This has a characteristic impedance Neglect resistance term LT Z0 CT Transient current ΔIL gives a voltage VL I L Z 0 Decoupling Z0 should be as low as possible (a few Ω) Difficult with spaced round conductors Z0 = 60 - 120 Ω Separation/diameter ratio > 3 Typically Two flat conductors 6.4mm wide. 0.127mm apart give 3.4 Ω Filtering Not covering design in this module Effectiveness quantified by Insertion Loss output Voltage without filter E2 IL output Voltage with filter E1 E2 IL 20 log E1 dB Filtering Impedance Levels Insertion loss depends on source and load impedance Design performance achieved if system is matched L and C are reflective components R is Lossy, or absorptive Reflective Filters Generally, filters consist of alternating series and shunt elements L L Rs High Rs Low RL Low C RL High C L/2 L L/2 Rs Low Rs High RL High C RL Low C/2 C/2 Reflective Filters Any power not transmitted is reflected. Series Elements Low impedance over passband High impedance over stopband Shunt Elements High impedance over passband Low impedance over stopband Generally use Lowpass filters for EMC Reflective Filters Filter Arrangements Shunt C Series L L-C combinations T Classic filter designs and Pi Sections Reflective Filters - Capacitive Shunt Capacitor Low Pass Source and Load Resistances Equal Vo 1 C Vo Vs 2 jRC Vs R R Vo 1 2 1 F 2 Vs where F fRC Reflective Filters - Example Derived Transfer Function 1 IL 20 log 1 F 2 2 10 log 1 F 2 80 60 C = 0.1μF and R = 50Ω Insertion Loss (dB) 40 20 0 0.1 1 10 Frequency (M Hz) Derived Characteristic 100 Reflective Filters - Example 80 Effect of strays in Capacitor Short Leads 7 C 1 10 9 L1 1.25 10 R 50 Rc 0.01 Long Leads 7 C 1 10 8 L 1 10 R 50 Rc 0.01 Insertion Loss (dB) 60 40 20 0 0.1 1 10 Frequency (M Hz) Long Leads Short Leads 100 Reflective Filters - Inductive Series Inductor R L R Vo Vs Vo 1 2 1 F 2 Vs Vo 1 Vs 1 j L R L where F f R Reflective Filters - Inductive Derived Characteristic same as for Capacitive Strays Effect 80 Rc 0.2 11 C 5 10 R 50 Insertion Loss (dB) 4 L 2.5 10 60 40 20 0 0.1 1 10 Frequency (M Hz) With Strays 100 Reflective Filters Cut-off frequency Insertion loss rises to 3dB 3 10 log 1 F 2 1 fRC Implies F = 1 or This gives us fc = 63.7kHz Based on values given earlier 7 C 1 10 R 50 Lossy Filters Mismatches between filters and line impedances can cause EMI problems Noise voltage appears across the inductor Radiates Interference is not dissipated but “moved around” between L and C. Add a resistor to cause “decay” Lossy Filters Neglect source and load resistors R Transfer Response L C Vs 1 Vo jC Vs R jL 1 jC 1 2 LC jCR 1 Vo Lossy Filters Natural Resonant Frequency Damping Factor Transfer Function becomes 0 Vo Vs 1 2 2 j 1 0 0 1 LC R 2 L C Lossy Filters 20 Transfer Characteristic Critically damped for minimum amplification Best EMI 0.1 Performance 0.5 Insertion Loss (dB) 10 0 20 40 60 0.01 0.1 1 Normalised Frequency Overdamped Critically Damped Underdamped 10 Ferrite Beads Very simple component Equivalent Circuit Ferrite Bead Conductor R L Impedance Z R 2 2 L2 Ferrite Beads Frequency Response Cascade of beads forms lossy noise filter Bead Impedance (Ohms) 150 100 50 0 1 10 100 Frequency (MHz) High L High R 1 10 3 Ferrite Beads Noise suppression effective above 1MHz Best over 5MHz Single bead impedance around 100Ω Best in low impedance circuits Power supply circuits Class C amplifiers Resonant circuits Damping of long interconnections between fast switching devices Mains Filters – Simple Delta Capacitive Two noise types L Common Mode Differential Mode Vc Vd Y Caps filter Common Mode 0.1 - 1 F X Cap filters Differential Mode Y E X Y 0.005F Max allowable N value shown here 0.005F Vc Mains Filters Frequency Response 40 Insertion Loss (dB) 30 20 10 0 0.1 1 10 Frequency (M Hz) Differential M ode Common M ode 100 Feedthrough Capacitors Takes leads through a case Shunts noise to ground Shunt Capacitance Lead Comparison with Standard Capacitor Typical Mains Filter C1 and C2 0.1 - 1μF Differential Mode L L provides high Z for Common Mode None for DM Neutralising Transformer L = 5 – 10mH L Equipment C1 C2 C3 L N E C4 Typical Mains Filter C3 and C4 are for CM currents to Ground and the equipment earth Response 60 40 20 0.1 1 10 Mhz 100 Summary Various filtering techniques have been presented Imperfections in components have also been discussed These strays can be applied to any filter The resultant circuit can become very complicated Circuit simulator may be a better route