Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Analog television wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Power MOSFET wikipedia , lookup
Digital electronics wikipedia , lookup
Index of electronics articles wikipedia , lookup
Oscilloscope wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Broadcast television systems wikipedia , lookup
Serial digital interface wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Phase-locked loop wikipedia , lookup
Telecommunication wikipedia , lookup
Surge protector wikipedia , lookup
Radio transmitter design wikipedia , lookup
Coupon-eligible converter box wikipedia , lookup
Wilson current mirror wikipedia , lookup
Valve audio amplifier technical specification wikipedia , lookup
Television standards conversion wikipedia , lookup
Oscilloscope types wikipedia , lookup
Voltage regulator wikipedia , lookup
Oscilloscope history wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Schmitt trigger wikipedia , lookup
Operational amplifier wikipedia , lookup
Integrating ADC wikipedia , lookup
Power electronics wikipedia , lookup
MOS Technology SID wikipedia , lookup
Current mirror wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
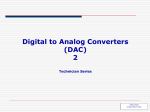
J. W. Bruce 24 the ADC’s input. ADCs are implemented with many, and widely varying, architectures. Several sources, listed at the conclusion of this article, can provide a glimpse into the diverse world of ADCs. Viewed as a black box, the DAC has an n bit digital word input. Its analog output is proportional to the DAC’s input. The DAC’s output is typically a voltage or current. A wide variety of circuits have been designed to perform digital to analog conversion. The astounding assortment of data converter architectures will quickly overwhelm the uninitiated. An understanding of how conversions are done will allow the engineer to make the proper choice for a given application. DACs can be classified into two categories, Nyquist-rate DACs or oversampling DACs, according to their operation. In general, Nyquistrate DACs operate on data samples generated their outputs at the sampling frequency. Nyquist-rate DACs typically have circuits that very obviously convert a digital number into an analog quantity. Oversampling DACs operate on data samples generated at frequencies that are much higher than the sampling frequency. Oversampling DACS usually have relatively simple circuitry, but use complex signal processing techniques to complete the data conversion. An excellent reference is pro- 0278-6648/01/$10.00 © 2001 IEEE vided at the conclusion of this article. This article covers two popular types of Nyquist-rate DACs: the flash DAC and the serial DAC. Flash DACs perform their conversion in a single clock cycle and are typically designed to operate at high speeds. Serial DACs convert the digital signal to an analog signal one bit at a time. Serial DACs trade the hardware complexity of a flash DAC for longer conversion times. In this article, three variations of flash DACs are introduced along with two serial DACs. Also, the advantages and disadvantages for each architecture will be discussed. Flash DACs A flash digital to analog converter, sometimes called a parallel DAC, is characterized by its ability to generate an output within a single clock cycle. The speed of a flash DAC is achieved by the parallel generation of a set of fixed references. The set of references are complete, i.e., they are capable of constructing all the possible DAC output values. Thus, any output can be created nearly instantly providing flash DACs with the ability to operate at high speeds. The differences between resistor string DACs, charge scaling DACs, and current steering DACs are primarily how each one creates the set of references and combines them to create the output. IEEE POTENTIALS © 1997 Artville, LLC., PhotoDisc, Jeff Nishinaka he ever-dropping cost of Very Large Scale Integrated (VLSI) circuits allows many analog functions to be done digitally. However, the real world still is, and will always continue to be, a fundamentally analog place. Thus, the analog signal of interest is translated into a format that a digital computer can utilize. This translation is the function of an Analog to Digital Converter (ADC). After processing, the resulting digital stream of information is returned to an analog form by a Digital to Analog Converter (DAC). An analog-signal once again, the information can be consumed by human senses or manipulated by analog circuits. Figure 1 shows the information conversion cycle between the analog and digital domains. ADCs and DACs are ubiquitous in computing systems. Many electronic products, including compact disc players, camcorders, digital cellular phones, modems, computer sound cards, computer graphics adapters, and high definition televisions, contain one or more data converters. For many purposes, a sufficient interpretation is that the converter accepts an analog input, typically a voltage or current. It then provides an n bit digital output which represents J. W. Bruce 24 the ADC’s input. ADCs are implemented with many, and widely varying, architectures. Several sources, listed at the conclusion of this article, can provide a glimpse into the diverse world of ADCs. Viewed as a black box, the DAC has an n bit digital word input. Its analog output is proportional to the DAC’s input. The DAC’s output is typically a voltage or current. A wide variety of circuits have been designed to perform digital to analog conversion. The astounding assortment of data converter architectures will quickly overwhelm the uninitiated. An understanding of how conversions are done will allow the engineer to make the proper choice for a given application. DACs can be classified into two categories, Nyquist-rate DACs or oversampling DACs, according to their operation. In general, Nyquistrate DACs operate on data samples generated their outputs at the sampling frequency. Nyquist-rate DACs typically have circuits that very obviously convert a digital number into an analog quantity. Oversampling DACs operate on data samples generated at frequencies that are much higher than the sampling frequency. Oversampling DACS usually have relatively simple circuitry, but use complex signal processing techniques to complete the data conversion. An excellent reference is pro- 0278-6648/01/$10.00 © 2001 IEEE vided at the conclusion of this article. This article covers two popular types of Nyquist-rate DACs: the flash DAC and the serial DAC. Flash DACs perform their conversion in a single clock cycle and are typically designed to operate at high speeds. Serial DACs convert the digital signal to an analog signal one bit at a time. Serial DACs trade the hardware complexity of a flash DAC for longer conversion times. In this article, three variations of flash DACs are introduced along with two serial DACs. Also, the advantages and disadvantages for each architecture will be discussed. Resistor string DACs Flash DACs A flash digital to analog converter, sometimes called a parallel DAC, is characterized by its ability to generate an output within a single clock cycle. The speed of a flash DAC is achieved by the parallel generation of a set of fixed references. The set of references are complete, i.e., they are capable of constructing all the possible DAC output values. Thus, any output can be created nearly instantly providing flash DACs with the ability to operate at high speeds. The differences between resistor string DACs, charge scaling DACs, and current steering DACs are primarily how each one creates the set of references and combines them to create the output. IEEE POTENTIALS © 1997 Artville, LLC., PhotoDisc, Jeff Nishinaka he ever-dropping cost of Very Large Scale Integrated (VLSI) circuits allows many analog functions to be done digitally. However, the real world still is, and will always continue to be, a fundamentally analog place. Thus, the analog signal of interest is translated into a format that a digital computer can utilize. This translation is the function of an Analog to Digital Converter (ADC). After processing, the resulting digital stream of information is returned to an analog form by a Digital to Analog Converter (DAC). An analog-signal once again, the information can be consumed by human senses or manipulated by analog circuits. Figure 1 shows the information conversion cycle between the analog and digital domains. ADCs and DACs are ubiquitous in computing systems. Many electronic products, including compact disc players, camcorders, digital cellular phones, modems, computer sound cards, computer graphics adapters, and high definition televisions, contain one or more data converters. For many purposes, a sufficient interpretation is that the converter accepts an analog input, typically a voltage or current. It then provides an n bit digital output which represents Voltage division flash DACs typically use 2Bor more matched circuit elements to divide the reference voltage into 2Bvoltages that can be used as the DAC’s analog voltage output. Resistor string DACs and charge scaling DACs use resistors and capacitors, respectively, to perform voltage division. They are the most common voltage division DACs. Current steering flash DACs typically uses B, 2B, or more matched circuit elements, to create reference currents. These are summed to create the DAC’s analog current output. Resistor string digital-to-analog converters use a resistor voltage divider network, connected between two reference voltages, to generate a complete set of voltages. Each voltage divider tap corresponds to a digital input. A B bit resistor string flash DAC uses at least 2B resistors. Some designs use additional resistors to create more accurate reference voltages, or voltages that correspond to rounded rather than truncated digital values. Switches, controlled by the DAC’s digital input, select the appropriate reference voltage to use as the output. Figure 2 shows a three-bit resistor string flash DAC architecture. The resistor string divides the DAC reference voltage, VREF, into 2B equally spaced voltages, Vk for k = 0, 1, ..., 2B – 1. The DAC architecture in Figure 2(a) uses 2B switches to connect the appropriate voltage to the DAC output, y(t). The switch control signals, Sk for k = 0, 1, ...,2B –1, are generated by a B:2Bdecoder (not shown). For longer word lengths, a large parasitic capacitance appears at the DAC output, limiting the DAC operating speed. An alternative resis- AUGUST/SEPTEMBER 2001 tor string DAC architecture in Fig. linearities are introduced directly into 2(b) arranges the switches into a the DAC’s output. binary tree structure. This architecA B:2B decoder is required to ture does not need a dedicated provide the 2B signals controlling the switches for the DAC implementadecoder, and uses the DAC’s digital tion in Fig. 2(a). Moreover, the input bits, xk[n], and their compleDAC’s output is always connected to ments, *xk[n], for k = 0, 1, ..., 2B – 1, to control the switches. Furthermore, 2B – 1 open switches and one closed parasitic capacitances are reduced switch. For large B, the parasitic since the output is connected to most capacitance at the DAC’s output B closed switches and B open switchnode grows large, and cones, thus increasing the conversion version times lengthen. An alterspeed. Major disadvanThe "Analog" World tages of the resistor string flash DAC architecture in Fig. 2 are the extreme voltage string resistors matching requirements and the Analog to ...110001010... ...100101110... Digital to Digital DAC’s inability to drive Digital Analog Signal Converter Converter loads without a buffer. Processor (ADC) (DAC) Resistor string voltage division accuracy is Fig. 1 Information conversion cycle between the restricted by VLSI techanalog and digital domains nology limitations. They VREF VREF include: linear gradient errors due to variations in V7 V7 doping density or fabriS7 x0[n] R R cated resistor widths, x1[n] V6 V6 S6[n] nonlinear errors in dif*x0[n] R R x2[n] fused resistors from non V5 V5 S5[n] x0[n] uniform depletion layer R R *x1[n] thickness, random errors V4 V4 S4[n] *x0[n] y(t) R due to geometry uncery(t) R V3 V3 tainties, random contact S3[n] x0[n] R R resistances, component x1[n] V2 V2 n ] S [ noise and component *x0[n] 2 R R *x2[n] aging. Furthermore, the V1 V1 x [ n ] n ] S [ 0 1 output of a voltage diviR R *x1[n] sion DAC must be V0 V0 S0[n] *x0[n] R R buffered by a high impedance amplifier. If appreciable current is drawn from (a) (b) the voltage divider network, additional errors will Fig. 2 Three bit resistor string flash DAC architecture be introduced due to the (a) requiring a decoder to generate switch connonlinearity of the DAC’s trol signals; (b) Three bit resistor string flash DAC analog switches. High architecture using tree structured switches proimpedance amplifier nonviding inherent decoding 25 physical size of the resistors can be increased to minimize the resistor matching t3 [n ] t6 [n ] t0 [n ] t5 [ n ] t1 [n ] t2 [ n] t4 [n ] t7 [n ] reset errors, but that lowers C C C C C C C C C the circuit density. y(t) With current fabrica(a) tion technology, resistor VREF string DACs are limited to word lengths of less than 10 bits. Other resistor string DAC design x 2 [n ] x1 [n ] x0 [n ] Reset issues deal with circuit 4C 2C C C area and power dissipay(t) tion. Large chip areas are required for longer word (b) length DACs due to the Fig. 3 Three bit charge scaling flash DAC architecture large number of voltage (a) with unary weighted capacitors, and (b) divider resistors. Area binary weighted capacitors usage is then further increased because the y(t) VLSI processes are inefficient at creating highly resistive components. t1 [n ] t5 [n ] t6 [n ] t7 [n ] t2[n] t3 [n ] t4 [n ] t 0 [n ] Furthermore, since curI I I I I I I I rent is always flowing through the voltage (a) divider, power is cony(t) stantly being dissipated. Although the resistor value, R, can be x 1 [n ] x2 [n ] x 0 [n ] increased to reduce 4I 2I I power losses, larger resistors occupy more (b) area. Finally, resistor string DACs have no Fig. 4 Three bit current steering flash DAC architecture (a) with unary weighted current sources, and (b) load driving ability. If the DAC output has an binary weighted current sources appreciable current draw, native implementation of the resistor this current is siphoned off of the voltstring flash DAC is shown in Fig. 2(b). age divider. This siphoning causes the This implementation uses a binary tree reference voltages to be inaccurate. switch array. The DAC output is conA big advantage of resistor string nected to B closed switches and B open DACs is their monotonicity and their switches. Fewer switches connected to ability to operate at high speeds. the DAC output reduce the parasitic Monotonicity is the guarantee that an capacitances and reduce the conversion increase in the DAC’s digital input time. The binary tree array switches are causes the DAC’s analog output to controlled by the DAC’s binary input increase. Because of the parallel since the decoding is inherent in the nature of their design, the resistor binary tree arrangement of the switches. string DAC implementations in Fig. 2 The resistor string DAC architecare very fast. Resistor string DACs are tures in Fig. 2 are only as accurate as used in many high bandwidth applicathe matching of voltage divider resistions such as digital video, RADAR tors. As the DAC’s input word length and communications. increases, the quantization step size decreases. In other words, the reference Charge scaling flash DAC voltages generated by the resistor string Charge scaling flash digital to anaare much closer, and the resistor matchlog converters perform signal convering requirements are increased. sion by dividing the DAC’s reference Unfortunately, modern VLSI fabricavoltage, V REF , using B, 2 B, or more tion processes are not exact and resismatched capacitors. For example, Fig. 3 shows a three bit charge scaling DAC tors cannot be perfectly matched. The VREF 26 architecture. Initially, each capacitor is discharged using the reset switch. Next, each capacitor is connected to either V REF or ground, causing the DAC output voltage, y(t), to be a function of the voltage division between the capacitors. The DAC architecture in Fig. 4(a) uses 2B switches to connect the appropriate number of unary weighted capacitors to VREF and the remaining capacitors to ground. The switch control signals, tk for k = 0, 1, ..., 2 B - 1, are generated by a thermometer encoder (not shown). The charge scaling flash DAC architecture in Fig. 3(b) uses B switches to connect the appropriate combination of binary weighted capacitors to VREF thereby creating the DAC output voltage, y(t). This architecture does not need a thermometer encoder. It uses the DAC’s digital input bits, xk[n], and their complements, *xk[n], for k = 0, 1,…, 2B - 1, to control the switches. A major disadvantage of the charge scaling flash DACs in Fig. 3 is the inability to drive loads without a buffer, the need for precisely matched capacitors, and the large transient currents drawn from VREF during switching. Charge scaling DACs are made nonlinear by capacitor mismatch, capacitor voltage dependence, and top plate parasitic capacitances. Capacitor geometry mismatches can be both linear gradient and random. Geometric mismatches are functions of capacitor width, length and oxide thickness. Oxide thickness is a function of the fabrication process. Oxide thickness gradients can become significant for large capacitors. Therefore, increasing capacitor dimensions does not reduce the mismatch error indefinitely. Capacitor mismatch reaches its smallest amount at a certain process-specific dimension. To improve the matching between capacitors, common centroid layout techniques can be used. Capacitor voltage dependence originates from the variation of the dielectric constant across capacitors and the depletion region thickness of each capacitor plate. Also, the top plate of the capacitors in the capacitor array has an appreciable parasitic capacitance to the substrate. This parasitic capacitance introduces a gain error over the fullscale range of the DAC. While the gain error is easily ignored or corrected in stand-alone DACs, it creates differential nonlinearities in multistep ADCs or oversampling modulators. IEEE POTENTIALS Current steering flash DAC A B bit current steering flash digital to analog converter typically uses B, 2B or more matched circuit elements to create B, 2B, or more reference currents. For example, Fig. 4 shows a three bit current steering DAC architecture. The resistor string divides the DAC reference voltage, V REF , into 2 B equally spaced voltages, Vk for k = 0, 1,…, 2B -1. The DAC architecture in Fig. 4(a) uses 2B switches to connect the appropriate number of binary weighted reference currents to create the DAC output current, y(t). The switch control signals, tk for k = 0, 1,…, 2B - 1, are generated by a thermometer encoder (not shown). An alternative current steering flash DAC architecture in Figure 4(b) uses B switches to connect the appropriate combination of binary weighted reference currents to create the DAC output current, y(t). This architecture does not need a thermometer encoder and uses the DAC’s digital input bits, xk[n] for k = 0, 1,…, 2 B - 1 , to control the switches. A major advantage of the current steering DAC architecture in Fig. 4 is its inherent high current drive and high speed. A disadvantage of this architecture is the glitches created when the switches do not operate at the exact same instant. Since the current sources are in parallel, if one source is switched off and another source is switched on, a glitch occurs if the timing is such that both sources are off, or both sources are on, at the same instant. This error is most significant at the DAC’s midscale when the largest number of sources are switching. Another design issue in current steering flash DACs is the stringent current source matching requirements. Current mirrors are typically used to implement the current sources in current steering DACs. However, current mirrors can exhibit significant matching errors, including linear gradient errors, random errors due to geometry uncertainties, component aging and component noise. Additional sources of error in current steering DACs are the finite output impedance of the current sources and the DAC’s load resistor nonlinearity. As the DAC output varies over its full-scale range, different impedances are connected to the DAC output changing the load resistance and introducing nonlinearity. Furthermore, many current steering DACs convert the current output to a voltage by connecting the DAC’s output node to an integrated cir- AUGUST/SEPTEMBER 2001 cuit resistor. Polysilicon resistors have a hyperbolic sine current-voltage characteristic, and integrated circuit diffusion resistors are nonlinear because their depletion region’s thickness is a function of voltage. Serial DACs their tasks of conversion, thus cyclic DACs typically have very compact designs. A cyclic DAC converts the digital input to an analog quantity one bit at a time. Thus, the hardware complexity is reduced at the expense of increased conversion time. In a B bit cyclic DAC, each bit conversion is added to the input’s previous bit conversion until all B bits of the DAC’s input have been processed. The accumulated result is the cyclic DAC’s analog output. Therefore, B cycles are required to convert the cyclic DAC’s B bit digital input. Figure 6 shows a voltage summing cyclic DAC architecture. In this architecture, the reset switch closes at the start of each conversion forcing the out- A serial digital to analog converter is characterized by its bit-wise conversion of a DAC input. In general, serial DACs are constructed with much simpler circuits compared to flash DACs. However, the savings in hardware complexity is “bought” by an increase in conversion time. This reduces the overall speed of the converter. For serial DACs to be used at a Nyquist rate, the internal “shifting” clock must φ1 xk φ2 run at a fre+ quency higher than the Nyquist VREF + C2 *xk C1 Reset Reset y(t) – frequency. – Furthermore, the serial DACs internal clock frequency gener- Fig. 5 A two capacitor serial DAC architecture ally increases with an increase in put voltage of the sample and hold input word length. This requirement is amplifier (SHA) to be zero. To start the often the limiting factor in serial DAC conversion, the reset switch is opened. The least significant bit of the DAC clock rates. A wide variety of serial DACs exist. input determines if the voltage source, A common characteristic of serial or ground, is connected to the summer DACs is that the data conversion is input. The voltage, VREF , is connected to the summer if the DAC’s least signifdone one bit at a time. To illustrate, Fig. icant bit is one, and ground is connected 5 shows a very simple serial DAC: the to the summer if the DAC’s least signiftwo-capacitor serial DAC. In Fig. 5, C1 = C2 and the signals ø1 and ø2 denote icant bit is zero. The sample and hold the phases of a two-phase nonoverlapamplifier holds the voltage constant and ping clock. In this architecture, the reset an amplifier with gain of 0.5 feeds the switch closes at the start of each convervoltage back through the summer. The sion, discharging both capacitors and feedback path’s voltage is added to forcing the DAC’s output voltage, y(t), VREF if the DAC’s second least significant bit is one and ground if the DAC’s to be zero. To start the conversion, the second least significant bit is zero. The reset switch is opened and ø1 = 1, the process continues until all B bits have least significant bit (LSB) of the DAC been examined and y(t) is proportional input determines if the C1 is charged to to the cyclic DAC’s input. VREF or zero. Next, ø1 opens its switch The most obvious drawback to and ø2 closes its switch. This operation cyclic DACs is the increased conversion allows C 1 and C 2 to share charges. time compared to flash DACs. Afterwards, ø2 opens its switch, ø1 closFurthermore, the conversion time es its switch, and C1 is charged to VREF increases linearly with the length of the or zero, depending on the value of the DAC’s input. However, the cyclic DAC second least significant bit. The process is extremely compact, and the circuit continues until all B bits have been does not change appreciably for longer examined, and the charge in both C1, input words. To illustrate, consider a and C2, and the voltage, y(t), is proporthree bit cyclic DAC with VREF = 10 V tional to the serial DAC’s input. and input x2x1x0 = 011. The digital input Cyclic DAC 011 corresponds to the decimal number Cyclic digital to analog converters 3. Therefore, the expected DAC output use very few components to perform should be y(t) = 3/8 VREF = 3.75 V. 27 xk VREF + - Σ Sample and Hold Amplifier (SHA) *xk reset clock Fig. 6 A cyclic DAC architecture Although the cyclic DAC has few circuit components, these components must be extremely accurate. The summer, sample and hold amplifier, and the one-half gain amplifier must all be accurate to one part in 2B. This requirement is prohibitive for large B, and typically is the limiting design specification in cyclic DACs. Pipeline DAC Cyclic digital-to analog converters typically have very compact circuits and longer conversion times than flash DACs. The pipeline DAC unrolls the cyclic DAC to create a larger DAC that can convert at much higher speeds. Like the related cyclic DAC, a pipeline DAC converts the digital input to an analog quantity one bit at a time. However, the pipeline DAC has dedicated circuitry for each bit’s conversion. This circuitry increases its hardware complexity and operating speeds compared to the cyclic DACs. In a B bit pipeline DAC, each bit is processed, added to the previous bit conversions and passed to the next stage until all B bits of the DAC’s input have been processed. The accumulated result is the pipeline DAC’s analog output. Therefore, B cycles pass before the initial DAC output is ready, but subsequent outputs are completed at every clock period thereafter. Figure 7 shows a voltage summing pipeline DAC architecture. In this architecture, the least significant bit of the DAC input determines if the voltage source, or ground, is connected to the sample and hold amplifier in the first stage. The voltage, VREF , is connected to the sample and hold amplifier if the DAC’s least significant bit is one and ground is connected to the sample and hold amplifier if the DAC’s least significant bit is zero. The sample and hold amplifier holds the voltage constant and an amplifier with gain of 0.5 sends the resulting voltage to the next stage. This voltage is increased by V REF if the 28 DAC’s second least significant bit is one, and unchanged if the DAC’s second least significant bit is zero. The process continues down the pipeline until all B bits have been examined. The output voltage, y(t), is 1 ×− 2 y(t) 1 ×− 2 SHA Σ Clock Read more aboutit • R.J. Baker, H.W. Li, and D.E. Boyce, CMOS: Circuit design, layout and simulation, New York: IEEE Press, 1998. 1 ×− 2 Σ VREF x1 *x1 VREF SHA 1 ×− 2 y(t) Clock Clock x0 *x0 SHA relative merits, e.g., a flash DAC for high speed applications, or a cyclic DAC for low speed applications where circuit complexity is crucial. *xB-1 xB-1 VREF Fig. 7 A pipeline DAC architecture ready at the last stage B clock period after the input is initially applied to the DAC. However, the next to last stage is forming the next DAC output, the third-to-last stage is forming the following DAC output, and so on. Therefore, the B bit pipeline DAC can generate a valid DAC output each clock period after an initial B period delay. The most obvious drawback to pipeline DACs is the increased hardware complexity compared to cyclic DACs. Furthermore, the circuit complexity increases linearly with the length of the DAC’s input. However, the pipeline DAC can operate at very high speeds after the initial delay to fill the pipeline. Like the cyclic DAC, the pipeline DAC’s components must be extremely accurate. All summers, sample and hold amplifiers, and the one-half gain amplifiers must be accurate to one part in 2B. For large B, this accuracy requirement, and the requirement that components be carefully matched between the stages, limits the pipeline DAC’s input word size. Summary The circuits presented in this article are only examples of flash and serial DACs implementations. Many variations of these architectures exist, and many more remain to be discovered. Furthermore, other DAC architectures, including subranging DACs, segmented DACs, multiplying DACs, interleaved DACs, and oversampling DACs, exist. The selection of the appropriate DAC for a given job should be based on its • J.W. Bruce, “Meeting the analog world challenge: Nyquist-rate analog to digital converter architectures,” IEEE Potentials, vol. 17, no. 5, pp. 36-39, 1999. • D. Hoeschele, Analog to digital and digital to analog conversion techniques, New York: Wiley, 1994. • S. Norsworthy, R. Schreier, and G.C. Temes, Delta-sigma converters: Theory, design, and simulation, New York: IEEE Press, 1994. • B. Razavi, Principles of data conversion system design, New York: IEEE Press, 1995. About the author J.W. Bruce received a B.S. degree from the University of Alabama in Huntsville in 1991, an M.S. degree from the Georgia Institute of Technology in 1993, and a Ph.D. degree from the University of Nevada in Las Vegas in 2000, all in electrical engineering. Dr. Bruce has served as a member of the technical staff at the Mevatec Corporation and the Integraph Corporation. He is currently an Assistant Professor in the Department of Electrical and Computer Engineering at Mississippi State University. His research interests include digital signal processing architectures and VLSI implementations for digital signal processing and data conversion. Dr. Bruce is investigating low harmonic distortion data converter designs and their analysis. Dr. Bruce is an Associate Editor of IEEE Potentials. IEEE POTENTIALS