Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Gibbs free energy wikipedia , lookup
Work (physics) wikipedia , lookup
Hunting oscillation wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
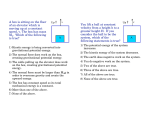
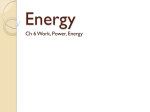
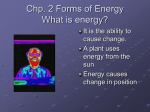
EF 102 Fundamentals of Engineering Mechanics Laboratory 13 Kinetic and Potential Energy; Conservation of Mechanical Energy Spring, 2003 Objectives Expand the concepts of work and kinetic energy to include potential energy. Apply the principle of conservation of mechanical energy for conservative force systems. Summary The work/energy principle for a body treated as a particle may be written as UW 1-2 + USP 1-2 + U′1-2 = T2 − T1 (1) where U′1-2 is the work on the body by all other forces acting on the body except those due to a linear spring and the weight of the body, since the work by these two forces is accounted for in the first two terms. That is −mg(h2 − h1) − (k/2)(x22 −x12) + U′1-2 = mv22/2 − mv12/2 (2) where we must remember that h is measured positive upward from a chosen reference elevation (the datum plane) and x is the amount of stretch or compression in the linear (elastic) spring. We may rewrite the above equation as or mgh1 + kx12/2 + mv12/2 + U′1-2 = mgh2 + kx22/2 + mv22/2 (3) Vg1 + Ve1 +T1 + U′1-2 = Vg2 + Ve2 + T2 (4) where Vg1 represents the gravitational potential energy of the body in position 1, Ve1 represents the elastic potential energy in the spring in position 1, and similarly for position 2. That is, the gravitational force has the potential to do work on the body with respect to the reference (datum) plane and the spring has the potential to do work on the body by virtue of the amount of its stretch or compression from its free length (the datum for the spring). Note that Eq.(3) is mathematically the same as Eq.(2); we have simply arranged the terms differently and given some terms new names. Now, if the only forces acting on the body are from the weight and the elastic spring (conservative forces since their work only depends on the end points of the path, positions 1 and 2), then U′1-2 = 0. Thus we have the situation known as conservation of mechanical (or dynamical) energy because the sum of the kinetic and potential energy terms in position 2 is equal to the sum of the kinetic and potential energy terms in position 1. The total mechanical energy is conserved as no mechanical energy is lost. Kinetic energy may increase or decrease, as may potential energy, but the total remains constant. Additional Information Since the concept of potential energy, like work, is usually confusing when first encountered, some further explanation of potential energy may be useful. Potential energy may be thought of as work that is stored, and that later may be converted into work on a body and thus act to change the kinetic energy of the body. A common example is to lift an object off the ground to some height h. We might think of this as storing energy in the gravity field between the body and the earth. This gravitational potential energy of the body is equal to the work performed to lift it, and is defined as Vg = mgh where mg is the object's weight and h is the vertical distance the object was raised. Thus the weight has the potential to do work on the body if the body moves back to the ground. We can also create potential energy by stretching or compressing molecular bonds, like in a spring or in a bent board. This is often called elastic potential energy, particularly when stretching or compressing an elastic (linear) spring. In this case the relationship between the applied force and the deformation of the spring is linear, or F = kx, where x is the distance the spring has been compressed or stretched from its at-rest undeformed position (“free length”) and k is the spring constant. Other relationships exist for other types of materials. Based on the linear assumption, the work done to deform a spring from its free length is equal to the potential energy Ve stored in the spring (ie, kx2/2 ). As the deformation of the spring changes from x1 to x2, the change in elastic potential energy is equal to Ve2 − Ve1 = kx22/2 − kx12/2 . Procedure and Analysis Task 1. Change Gravitational Potential Energy to Elastic Potential Energy This is similar to, but different from, Task 2 of last week's lab. A tennis ball is supported from the ceiling by one strand of a bungee cord. The ball is released from rest at position 1 and allowed to fall to its lowest position 2 before rebounding. Assume the cord acts like an elastic spring. a) Determine the spring constant of the cord. Note that it is not necessary to measure length L1. b) Release the ball from rest at position 1, where the cord is unstretched but 1 L1 fully extended (L1= Lf = the free length of the cord). The cord is attached to the top of the ball in position 1. Record the lowest position (2) reached by the ball. What is the speed of the ball at this location? Be Tape measure sure you use the same reference point on the ball to record its location in both positions 1 and 2. Suggestion: It is convenient to measure up from the floor and use the top of the ball as reference for position. 2 c) Since the kinetic energy of the ball is zero at both positions 1 and 2, the floor magnitude of the change (decrease) in gravitational potential energy of the ball should just equal the change (increase) in elastic potential energy of the cord from 1 to 2, assuming the cord behaves like a linear spring. Use the principle of conservation of mechanical energy between positions 1 and 2 (Eq.(3) with U′1-2 = 0) to predict the lowest position reached by the ball. d) Discuss briefly why your calculated lowest position may not exactly be the same as your experimental value. Was it easy to determine the exact location of position 2? e) If there were no loss of mechanical energy in the system, how high (we'll call position 3) would the ball rebound to? How far down would it then travel before changing the direction of its velocity again and starting back upward? f) Even though the velocity of the ball is instantaneously equal to zero at the highest and lowest positions, is the acceleration equal to zero at these locations? At any locations? Is the acceleration constant along the path? g) Calculate the location where the ball has zero acceleration. Hint: A FBD of the ball, not the cord, and use of Newton's Second Law should quickly guide you to the answer. h) Note that when the ball is above the position of zero acceleration, the acceleration is downward and when below this location the acceleration is upward. Thus, where along the path is the speed of the ball a maximum? ceiling Task 2. Determine the Loss of Mechanical Energy of a Tennis Ball Striking the Floor 1 4 floor 2, 3 a) Drop a tennis ball from shoulder height (position 1), and measure the maximum height to which the ball bounces (position 4). b) Calculate the total mechanical energy, kinetic plus potential, (sometimes called dynamical energy) of the ball before it is dropped, and again when it is at the top of its first bounce. To calculate the gravitational potential energy of the ball with respect to any datum, should you measure to its top, center, or bottom? Use 3cm above the floor as your datum for gravitational potential energy. You will see why in part (g). c) Calculate the percent of mechanical energy lost from position 1 to 4. Thus mechanical energy is not conserved over the entire path for the ball falling to the floor and rebounding to its maximum height. d) Using the principle of conservation of mechanical energy from 1 to 2, calculate the speed v2 of the ball just before it hits the floor (neglect drag on the ball from air resistance). e) Knowing the height to which the ball rebounded, calculate the speed v3 of the ball just after it leaves the floor. As before, neglect air resistance. f) Assume that the total mechanical energy loss occurs during the bounce itself. Determine the percent loss based on its mechanical energy just before and just after impact with the floor. You should obtain the same result as in part (c). Where did our lost energy go? Two Challenging Questions: g) If you had done everything the same as above except had taken your reference plane (datum) for gravitational potential energy to be at the floor, or possibly the basement of Estabrook, would any of your calculated results be different? Which results, if any, would change? h) It may appear that the work/energy principle is not valid over the time the ball is in contact with the floor. If we apply Eq.(4) from position 2 to position 3 (just before impact to just after impact with the floor), we obtain T2 + U′2-3 = T3. Thus U′2-3 must equal T3 – T2 , which is not zero. Where did the work (which is negative) come from? Task 3. Convert Potential Energy to Kinetic Energy for a Hot Wheels Car “Looping the Loop” 1 2 2R H a) Draw a FBD of the car in position 2 and determine the speed v2 at which the normal force of the track on the wheels is reduced to zero. This is the minimum speed the car must have to still be on the circular path at position 2. You should obtain v2 = (gR)1/2 where R is the radius of the circular path of the center of mass of the car. b) Assume that mechanical energy is conserved between positions 1 and 2. Calculate the height H (to the car’s center of mass at position 1) at which the car should be released from rest in order for it to be on the verge of leaving the track in position 2 (thus v2 = (gR)1/2). You should obtain H = 2.5R. c) Did you need to know the mass of the car, slope of the track or the distance traveled to calculate your result in step (b)? Why? Should R be the radius of the track or the radius of the path traveled by the center of mass of the car? d) Release the car from rest at a height H (position 1) for which the car will just begin to leave the track at position 2. Record this height (several trials). To what point in the car should you measure to obtain H? e) Discuss reasons why your predicted value of H is less than your experimental value. Comment: One reason the predicted value is less than the experimental value is that we have treated the car like a "particle", and consequently said its kinetic energy is specified entirely by mvc2/2, which is its kinetic energy due to translation of the center of mass. In reality the car has some additional kinetic energy in position 2 not accounted for by mvc2/2. This is due to the fact it is rotating in addition to translating (a line in the car rotates through an angle as the car travels on the circular path). We have not discussed this form of kinetic energy due to rotation, which is probably small, but not insignificant in this problem. Sometimes a body has only rotational kinetic energy, as in a wheel rotating about a fixed axis through its center of mass. In this case the translational kinetic energy mvc2/2 would equal zero (the center of mass has a speed of zero). If the wheel were rolling along the road it would have a kinetic energy given by the sum of the kinetic energy due to translation mvc2/2 and the kinetic energy due to rotation.