Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Control system wikipedia , lookup
Stepper motor wikipedia , lookup
Resilient control systems wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power engineering wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Buck converter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Fault tolerance wikipedia , lookup
Voltage optimisation wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Electric vehicle conversion wikipedia , lookup
Power electronics wikipedia , lookup
Mains electricity wikipedia , lookup
Resonant inductive coupling wikipedia , lookup
Rectiverter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Distribution management system wikipedia , lookup
Alternating current wikipedia , lookup
Electromagnetic compatibility wikipedia , lookup
Counter-IED equipment wikipedia , lookup
Automotive
Compilation
Volume 7 December 2010
Contents
Table of Contents
Configurable RF Architecture Gives Engineers
Greater Design Flexibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Design and Security Considerations for Passive
Immobilizer Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
Automotive LIN Bus Driving Sensor Applications . . . . . . . . 12
Designing Next Generation Key Fobs . . . . . . . . . . . . . . . . . . 15
Capacitive Proximity Detection in the Automotive
Industry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Extending the Range of E-vehicles with Li-ion
Batteries Using Active Balancing . . . . . . . . . . . . . . . . . . . . . . 24
Precision Battery Monitors for Standard Lead Acid
Batteries Ensure Engine Start-up . . . . . . . . . . . . . . . . . . . . . . 27
DC and BLDC Motor Control ICs . . . . . . . . . . . . . . . . . . . . . . . 29
EMC – Synonym for Exasperating, Magic, Confusing? . . . 36
EMC Pulse Immunity System-level Tests . . . . . . . . . . . . . . . 41
Configurable
RF Architecture Gives
Engineers Greater Design
Flexibility
Ahmad Chaudhry and Jim Goings
In the automotive environment, RFenabled sub-systems continue to
evolve and proliferate. Such systems
include Tire Pressure Monitoring
Systems (TPMS), which are mainly
unidirectional on a single RF channel at
relatively high data rates; Remote Start
(RS) systems, which are generally
bidirectional on single or multiple
RF channels at relatively low data
rates; Passive Keyless Entry (PKE)
and Remote Keyless Entry (RKE)
applications, which are unidirectional
on single or multiple RF channels at
moderate data rates. TPMS uses both
On Off Keyed (OOK) and Frequency
Shift Keyed (FSK) modulation, RS uses
OOK only, and RKE uses either OOK
or FSK. To accommodate such multiple
systems and applications, automotive
RF semiconductor devices must
possess flexible as well as configurable
architectures. The need for architectural
flexibility, combined with customer
expectations of high performance,
improved range, and reliability, is driving
the next generation of RF IC designs.
Beginning with range and reliability,
improvements here are easier to
realize when the transmit path has
programmable parameters. One can
1
usefully employ a Power Amplifier
(PA) with reserve capacity, which can
be trimmed in output power level to
provide the maximum allowable output
in accordance with local regulatory
requirements. Further benefit can be
obtained from a PA whose output
impedance can be trimmed to optimize
the antenna match. Range and
reliability gains on the receive side can
be enhanced through proper selection
of sensitivity-related parameters,
such as RF carrier frequency, subchannels, modulation, data rate, and IF
bandwidth.
and RS. The devices also support all
automotive bands: 310 to 318MHz,
418 to 477MHz, and 836 to 928MHz
and use one device and a single crystal
frequency.
These two devices are also designed
for architectural flexibility. A dualLNA architecture with two separate
input pins natively supports multiband applications using one single
IC, PCB, and bill of materials (BOM).
Additionally, dual-parallel demodulation
paths support simultaneous ASK and
FSK sensing capability. These features
Atmel Has Introduced Next-Generation Transceiver
And Receiver Devices With Configurable Options
Flexibility for the design engineer
is also gained through access to a
receiver in which these parameters are
available as a programmable option.
Atmel® has introduced next-generation
transceiver and receiver devices
with these configurable options.
For example, the Atmel ATA5830
transceiver and Atmel ATA5780
receiver can accommodate automotive
applications such as RKE, PKE, TPMS,
accommodate multiple polling schemes
including TPMS, RS and up to three
RKE channels, and can be configured
to support RF protocols across multiple
frequency bands, modulation schemes,
and data rates.
To implement the vast array of
configurable content in both Atmel®
devices, the desired configuration
settings are stored in the built-in
EEPROM and automatically applied to
© 2010 / www.atmel.com
(Optional)
(Optional)
PB3
PB4
PB5
PB6
PB7
AGND
TEST
_
102
SPDT_RX
RFIN
_HB
SPDT_ANT
SPDT_RX
PB3
PB4
PB5
PB6
PB7
PB2
23
24
22
23
DGND
PB0
21
22
DVCC
DGND
20
21
PC5
DVCC
19
20
PC4
PC5
18
19
PC3
PC4
17
18
Atmel
SPDT_TX
ANT_TUNE
RF_OUT
SPDT_TX
PC2
PC1
PC0
VS
AVCC
XTAL2
XTAL1
VS_PA
XTAL2
VS_PA
RF_OUT
PC3
PC2
PC1
PC0
VS
AVCC
TEST_
EN
10 11 12 13 14 15 16
9
24
PB1
PB2
PB0
PB1
ATA5830
Atmel
ATA5830
ANT_TUNE
SPDT_ANT
9
AGND
TEST
_
102
32 31 30 29 28 27 26 25
TEST_
EN
8
RFIN
_LB
RFIN
_HB
RFIN
_LB
XTAL1
1
1
3
1
4
3
5
4
6
5
7
6
8
7
ATEST
_
101
1
ATEST
_
101
32 31 30 29 28 27 26 25
17
10 11 12 13 14 15 16
VS = 3V
Elements
Number
Inductor
Elements
Capacitor
2Number
(3)
Matching
Comments
72(9)
3Matching
(5) for matching
(3)
43for
Blocking
7 (9)
(5)
for matching
Crystal
1
Capacitor
Inductor
Crystal
1
VS = 3V
Comments
14single
crystal for 3
for Blocking
different frequency ranges
1 single crystal for 3
different frequency ranges
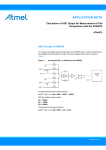
Figure 1. Atmel ATA5830 Transceiver Application Circuit
SPDT_RX
RFIN
_HB
SPDT_ANT
SPDT_RX
N.C
N.C
MISO
PWPON
LED1
NSS
ATA5780
MISO
PWPON
LED1
24
SCK
MOSI
NRESET
VS
AVCC
XTAL2
NRESET
XTAL2
NPWRON3
TMDO
VS
AVCC
10 11 12 13 14 15 16NPWRON2 17
TEST_
EN
9
XTAL1
9
MOSI
23
24
CLK_OUT
SCK
22
23
DGND
CLK_OUT
21
22
DVCC
DGND
20
21
NPWRON5
DVCC
TRPB
19
20
NPWRON4
NPWRON5
TRPB 18
19
NPWRON3
TMDO
NPWRON4
NPWRON2 17
18
TRPA
NPWRON1
NPWRON1
N.C
N.C
N.C
NSS
Atmel
ATA5780
Atmel
N.C
SPDT_ANT
N.C
N.C
AGND
AGND
RX_Active
RX_Active LEDO
LEDO
NPWRONG
NPWRONG
IRQ
IRQ
TEST
_
102
TEST
_
102
32 31 30 29 28 27 26 25
TEST_
EN
8
RFIN
_LB
RFIN
_HB
RFIN
_LB
XTAL1
1
1
3
1
4
3
5
4
6
5
7
6
8
7
ATEST
_
101
1
ATEST
_
101
32 31 30 29 28 27 26 25
TRPA
10 11 12 13 14 15 16
NSS
MISO
MOSI
NSS
MOSI
VS = 4.5v to 5.5v
Microcontroller
SCK
Elements
Number
Inductor
Elements
1Number Matching
Comments
41
1Matching
for matching
Capacitor
Inductor
Capacitor
VS = 4.5v to 5.5v
Microcontroller
MISO
SCK
Crystal
Crystal
4
1
1
Comments
31for
forBlocking
matching
13single
crystal for 3
for Blocking
different frequency ranges
1 single crystal for 3
different frequency ranges
accessible firmware, making it
possible to develop an entire
application using just one single IC.
Both the ATA5830 transceiver and
the Atmel ATA5780 receiver are also
highly integrated, requiring very few
external components. The application
circuits (see Figures 1 and 2) show
a standard implementation of each
device. For a typical application, the
ATA5830 transceiver only requires 10
external elements and the ATA5780
only six external elements. Both
devices are packaged in a 5 x 5mm,
32-pin QFN package.
In conclusion, the
newest generation
of configurable Atmel
RF semiconductor
devices provides the
design flexibility needed
for rapidly evolving
automotive RF-enabled
subsystems .
Figure 2. Atmel ATA5780 Receiver Application Circuit
Atmel Devices Also Have Enhancements Which
Simplify Design and Reduce BOM Cost
the device on power-up. This enables
autonomous (stand-alone) operation
and polling for incoming signals from
multiple RF systems with differing RF
carrier frequency bands, modulation
formats, and data rates. Stand-alone
operation allows an external controller
to sleep while the device polls,
validates start of frame, and checks for
proper transmitter ID data. The device
only wakes the controller when a valid
message is detected. This is critical to
reducing Ignition Off Draw (IOD) in
Automotive Compilation Vol. 7
vehicle-mounted applications and to
extending battery life in handheld fob
applications.
Atmel devices also have some other
enhancements which simplify design
and reduce BOM cost. The Atmel
ATA5830 transceiver device, for
example, has an embedded Atmel
AVR® microcontroller on the same
silicon die. The microcontroller
includes 6kByte of Flash and a
24kByte ROM library of user-
2
Design and Security
Considerations for Passive
Immobilizer Systems
Jim Goings, Toby Prescott, Michael Hahnen, Karl Militzer
For years, consumers have come to rely on the convenience and added security that
a passive vehicle immobilizer system offers . These systems consist of a key fob, carried
by the driver, and a base station, mounted in the vehicle . They work together to
determine if the driver is authorized to start the vehicle . Of equal or greater importance
is the system’s ability to prevent unauthorized sources from using the vehicle . While
top-level functionality of a vehicle immobilizer is simple to describe, the underlying
technology enabling it is intriguing and sophisticated . This article will explore both
the hardware and software aspects of vehicle immobilizer systems as well as offer
noteworthy comments on design and security considerations .
Communication
The prevailing method of communication between key fob
and vehicle in passive vehicle immobilizer systems today
is with a modulated magnetic field. This field is created by
the vehicle’s immobilizer base station from a low frequency
alternating current, typically 125kHz. The magnetic field
serves three fundamental purposes: A) the power source for
the key fob, hence the term “passive”, B) a carrier on which
information from the base station to key fob is conveyed, e.g.
“downlink”, C) a carrier on which information from the key
fob to the base station is conveyed, e.g. “uplink”.
authentication process, which has a direct impact on response
time. The sections that follow will address these topics in
greater detail.
System Interfaces
The system architecture of a vehicle immobilizer has several
layers of abstraction, each representing different system
interfaces. Figure 1 provides a visual representation of these
layers.
Crytographic
Protocol
Characteristics of magnetic fields that are of particular appeal
for a vehicle immobilizer system pertain most to the key fob’s
need to operate completely passively, e.g. without a battery.
“Downlink” field detection and “uplink” field modulation
can both be achieved using circuitry that consumes very
little current. Furthermore, harnessing sufficient field energy
to power these circuits in the key fob electronics can be
achieved with relative ease.
During the system design phase, care must be taken to
carefully consider key performance parameters such as key
fob energy requirements, which affect
antenna coil geometries and drive levels, and the
3
Logical
Physical
Figure 1. Vehicle Immobilizer Interface Layers
The Physical Layer
A t the lowest level of a vehicle immobilizer system is the
physical layer. It consists of a vehicle-mounted antenna coil
capable of creating a magnetic field of sufficient magnitude
to enable its detection and modulation by an antenna coil
mounted in the user’s key fob.
© 2010 / www.atmel.com
Field Generation and Modulation
Vehicle immobilizer systems can be classified in one of two
different ways based on how the magnetic field is used
to support the transfer data: half duplex or full duplex. In
a half-duplex system, the vehicle-mounted antenna coil
alternates between periods of energy transfer and data
transfer. Uplink data (e.g., fob to vehicle) is modulated using
Frequency Shift Keying (FSK). A graphical representation of
this communication method is shown in Figure 2. Two points
should be intuitively obvious from viewing Figure 2. First, the
rate of data transfer suffers from a significant compromise
due to the recurring need to perform the energy transfer,
e.g., charge up the key fob. Second, the modulated signal is
very small compared to the field present during the energy
transfer period, making it more susceptible to interference
from ambient noise which results in reduced range. These
characteristics have caused the popularity of half-duplex
systems to wane.
The dominant system in use today is the full-duplex system
in which the vehicle-mounted antenna coil performs energy
transfer AND data transfer simultaneously. Uplink data is
modulated using Amplitude Shift Keying (ASK). A graphical
Magnetic Field Charges Key Fob
FSK Key Fob Return Frequency ƒ¹ (red)
Figure 2. Half-duplex Communication Using FSK
Automotive Compilation Vol. 7
FSK Key Fob Return Frequency ƒ (blue)
0
4
Magnetic Field Charges Key Fob
ASK Key Fob Return Signal - Resistively Damped ( Green )
ASK Key Fob Return Signal - Undamped ( Black )
Figure 3. Full-duplex Communication Using ASK
representation of this communication method is shown in
Figure 3. Clearly, the ability to simultaneously transfer data
while keeping the key fob energized, or charged, provides
the design engineer a significant data transfer rate advantage
over half-duplex systems. Additionally, the constant carrier
field tends to mask out interferences and enables robust
communication during the data transfer. Furthermore, this
approach can be realized using simple envelope detection
circuitry. Because of the popularity of the full-duplex vehicle
immobilizer system in the market place today, the rest of this
document will focus on this type of system.
to predetermined times; T0 for a logic “0” and T1 for a
logic “1”. The advantage to this approach is that it embeds
energy transfer from vehicle to key fob into the data
encoding and ensures the key fob will be supplied enough
energy to process the encoded data. However, a side effect
of this encoding method is that the data transfer baud rate
depends on the logical value of the data bit stream being
sent since the transmission times for each binary state are
different. See Figure 4 for a more detailed graphical depiction
of this coding method.
System Interfaces: the Logical Layer
1-bit value
The next layer above the physical layer is the logical layer.
This layer captures the characteristics and requirements for
the coding and transfer of data across the magnetic field. It
applies to the bi-directional data transfer that takes place
from vehicle to key fob, commonly referred to as “downlink”,
as well as key fob to vehicle, also known as “uplink”.
‘0’
Downlink
‘1’
Downlink information is coded using Pulse Length
Modulation; typically Binary Pulse Length Modulation
(BPLM) or Quad Pulse Length Modulation (QPLM). This
method is based on inserting a carrier field gap, Tgap, of
fixed duration and setting the gap to gap timing intervals
5
BPLM bit frame example
LF-Field
Tgap
12 x CLKFC
LF-Field
Tgap
20 x CLKFC
Figure 4. BPLM Coding Method
© 2010 / www.atmel.com
QPLM is a variation of BPLM that is sometimes used. With
this modulation, two bits are transmitted after one gap, and
therefore more power is available on the transponder side. In
addition, the average baud rate is higher compared to BPLM.
The coding method follows the same basic implementation
as BPLM, except the allowed number of states is extended
from two to four and the predetermined gap to gap timing
Clock
Data
0
0
1
1
0
1
0
0
Manchester
Bi-phase
Figure 6. Manchester and Bi-phase Coding
2-bit value
QPLM bits frame example
LF-Field
‘00’
Tgap
18 x CLKFC
‘01’
LF-Field
Tgap
Both encoding techniques enable clock extraction from
the encoded data stream. This is possible because all time
durations in the coded bit stream are quantized to one of two
values; T or 2T, where T is what is referred to as a “half bit”.
Data rate is fixed by the relationship 1/(2T). Clock extraction
merely requires the detection of the minimum time duration
element, T, and synchronizing its phase with the coded bit
stream.
28 x CLKFC
LF-Field
Tgap
‘10’
40 x CLKFC
‘11’
LF-Field
Tgap
62 x CLKFC
Figure 5. QPLM Coding Method
intervals are expanded to cover the additional states. See
Figure 5 for a visual representation of QPLM.
Uplink
Information communicated from the user fob to the vehicle
base station is typically encoded using Manchester or Biphase. These encoding methods share several characteristics
that differ from the downlink: A) the encoded bit stream
always has an average duty cycle of 50%, B) the time
to send encoded data is based solely on the baud rate.
Automotive Compilation Vol. 7
Protocol Layer
The protocol layer defines how individual data bits are
grouped to enable communication between the vehicle
base station and key fob. It defines how many bits and in
which order they are transmitted between the reader and
the transponder. As a simple analogy, this can be compared
to the rules governing the formation of sentences in using
words. The protocol layer would be like the sentence formed
from the logical layer which would be like the words. It forms
a fixed set of commands along with their allowable responses.
Authentication
Authentication is the term used to describe the process of
deciding whether the driver is authorized to start the vehicle.
The simplest form of this is called unilateral authentication.
In this case, the vehicle “tests” the key fob to determine
if it has been associated/learned to the vehicle. When an
additional step is added to this process, in which the key
attempts to “test” the vehicle to determine if it has been
associated with the key fob, it becomes bilateral or mutual
authentication. Clearly, this added step increases security
strength but comes at the expense of longer authentication
time.
6
Unilateral Authentication Protocol
Key
Read UID
Command
Car
LF-Field On
Detection Header
(optional)
Key
Memory
ID
Memory
ID
4-bit Command
+ 4-bit CRC
Key
Memory
Read UID
ID
OK?
8-bit Header
+ 32-bit ID
+ 8-bit CRC
Stop
N
Y
Random Number
Challenge
8-bit Command
+ N Challenge-bit
+ 8-bit CRC
AES-128
(enc.)
Response
Challenge
AES-128
(enc.)
8-bit Header
+ M Response-bits
+ 8-bit CRC
=
Response
N
Stop
Y
Valid
OK, it is the
right key
Start Authentication
Command
Figure 7. Unilateral Authentication
Unilateral Authentication
Key Learn: Open/ Secure
Typically, the unilateral authentication protocol is initiated by
the vehicle and consists of the following steps:
1. Vehicle reads the key fob’s unique ID (not to be
confused with the secret key)
The Key Learn Protocol is the process that is used to allow
the vehicle to establish a secret key and share it with the key
fob. Depending on the restrictions and safeguards placed on
the initiated Key Learn session by the vehicle, secret keys
can be shared openly or securely.
2. Vehicle generates a random number challenge and
sends it to the key fob
An open Key Learn process would typically consist of the
following steps, also shown in Figure 8:
3. Key fob encrypts the challenge (using the secret key)
and sends this response to the vehicle
1. Vehicle generates a secret key based on a random
number and “proposes” it to the key fob
4. Vehicle compares key fob’s response with its calculated
response (using same key and challenge)
2. Key fob “accepts” secret key, saves to memory, and
responds with an acknowledgment
Note: The vehicle must posses the key fob’s secret key to
enable the success of this transaction. The process of sharing
the secret key is called “Key Learn” and is described in the
next section.
7
3. Vehicle saves secret key to memory after successful
receipt of key fob’s acknowledgement
If the Key Learn Protocol can’t be protected from
eavesdroppers or unauthorized access to the vehicle, it may
be desirable to utilize a Secure Key Learn Process.
© 2010 / www.atmel.com
Open Key Learn 1/2
Key
Car
LF-Field On
Detection Header
(optional)
Secret Key
Random Number
8-bit Command
+ 128 bit Key
+ 8-bit CRC
Secret Key
Learn Secret
Key (1 or 2)
Cmd
Key Memory
=
Pass
N
Stop
Y
Response ( Pass/Fail )
8-bit Header
+8 bit Status
+ 8-bit CRC
Key Memory
Figure 8. Open Key Learn
Bilateral or Quasi-mutual
Authentication
A more complex form of an authentication process is the
quasi-mutual or bilateral authentication. It is not a full
mutual authentication that is implemented in the Atmel®
immobilizer system because it does not use random
generators on both sides of the system, the car and the
key. The implemented solution uses a MAC (Message
Authentication Code) to authenticate the car vis-à-vis the
key.
Again, the authentication protocol is initiated by the
vehicle and – in case of a bilateral authentication –consists
of the following steps as shown in Figure 9:
1. Vehicle reads the key fob’s unique ID
2. Vehicle generates a random number challenge and
sends it to the key fob
3. Vehicle encrypts the random number and appends it
to the challenge
Automotive Compilation Vol. 7
4. Key fob encrypts the challenge (using secret
key 1) and compares it with the received encrypted
challenge (MAC)
5. If the result matches, the key fob encrypts it (using
secret key 2) and sends this response to the vehicle
6. Vehicle compares key fob’s response with its
calculated response (using same key and challenge)
Cryptographic Layer
The cryptographic layer provides the highest level of
encryption. It contains the mathematical function that
transforms a plain text message into a secret message.
Ideally, this function should have two properties:
1. Unique: For every plain text input, there must be a
unique secret text output
2. Unpredictable: It must not be possible to predict a
plain text to secret text pair, even if a large sample
of known good plain text to secret text pairs was
available for analysis
8
Bilateral Authentication Protocol
Key
Detection Header
(optional)
ID
memory
ID
4-bit Command
+ 4-bit CRC
8-bit Header
+ 32-bit ID
+ 8-bit CRC
Random Number
128-bit
Key 1
AES -128
encryption
Stop
Ok, is it the
right
car, continue
N
=
Y
Read UID CMD
Read UID
ID
OK?
Stop
N
Y
Start Authenitcation
Command
Random Number
8-bit Command
+ N bit RandN
+ M bit (RandN)
+ 8-bit CRC
Hidden
challenge (HCH)
expanded to 128 bits
AES -128
encryption
128-bit
Key 2
Car
LF-Field On
128-bit
Key 1
Hidden
challenge (HCH)
expanded to 128 bits
AES-128
encryption
128-bit
Key 2
AES-128
encryption
8-bit Header
+ M bit {Resp}AES
+ 8-bit CRC
=
Y
N
Stop
Ok, is it the
right key,
car match
Valid
Figure 9. Bilateral Authentication Protocol
Public vs . Private
For many years, private cryptographic algorithms were
commonplace. However, private algorithms have drawbacks:
A) uncertainty of algorithm’s strength, B) lack of being
subjected to critical peer review, C) potential wide-scale
security compromise should the algorithm be leaked to the
public. In recent years, several high-profile examples can be
cited that illustrate these weaknesses. Perhaps even more
compelling is the lack of interoperability in systems that share
the same physical and logical layers. This interferes with basic
competitive market forces and in many cases drives higher
system costs.
In an effort to address these concerns, public opinion has
shifted toward the acceptance of a public domain encryption
algorithm – the Advanced Encryption Standard (or AES,
as it is more commonly referred to). Its origin comes from
the 1997 initiative at the National Institute of Standards and
Technology (NIST) to select a public-domain encryption
algorithm. Within a year, fifteen candidate algorithms
were identified and subjected to critical review by the
cryptographic research community. This analysis included an
9
assessment of security and efficiency characteristics for each
algorithm. After trimming the list of candidates from fifteen to
four, NIST subjected them to a second round of public review
before finally selecting the AES algorithm in 2000.
AES, as we know it today, is a symmetrical block cipher that
combines a 128-bit plain text input with a 128-bit secret key
to create a 128-bit encrypted output. Due to its symmetrical
characteristics, AES can also be used in reverse to combine
the encrypted output with the secret key to find and extract
the original plain text input.
System Security Considerations –
Attacks and Countermeasures
A common misconception held today is that the security of a
vehicle immobilizer system is established by the strength of
the encryption algorithm. While encryption algorithm strength
is important, it alone does not define the overall system’s
resistance to attack. Each of the interface layers in the
immobilizer system, algorithmic, protocol, logical and physical,
contributes to the system’s overall security and must be
studied and fortified against attack.
© 2010 / www.atmel.com
Algorithmic Security and
Countermeasures
Physical/Logical Security and
Countermeasures
As noted earlier, it is imperative that the encryption algorithm
possess unique and unpredictable characteristics. In the case
of AES, the details of how the algorithm operates is freely
available to the public and as a result, it has been subject
to critical review by the research community. This, by far,
is the best countermeasure available. To date, scientific
studies have confirmed the algorithm’s strength as it has
withstood the test of time (over 10 years). However, in the
case of private algorithms, scientific analysis by the research
community was not possible, leaving the strength of these
algorithms in question. In fact, many have failed to withstand
the test of time and in recent years their weaknesses have
been exposed.
In recent years, attack methods have grown more
sophisticated. “Side-channel” attacks such as Simple Power
Analysis (SPA) and Differential Power Analysis (DPA) as
well as other “invasive” attacks have been successfully
applied to extract secret keys from key fobs. These socalled side-channel attacks measure and evaluate the power
consumption of a cryptographic device and combine it with
knowledge of the plain text or cipher text in order to extract
an otherwise secret key. The theory underlying these
methods is quite sophisticated and beyond the scope of this
document. The strongest defense against the side-channel
attacks noted above are:
Protocol Security and Countermeasures
In systems using unilateral authentication, attacks on the
protocol layer are typically accomplished using “scan” or
“dictionary” methods. In a “scan” attack, the attacker
receives a challenge from the vehicle and returns random
values in response. If the protocol consisted of a 56-bit
response, then the bit security is 256 , i.e., it takes 256 trials to
get one valid challenge-response pair. To resist this type of
attack, the following measures can be considered:
• Increasing the response bit length to add complexity
• Having the vehicle embed exponentially growing timeouts between consecutive unsuccessful trials
• Having the vehicle block trials after a fixed number of
consecutive unsuccessful trials are attempted
In a “dictionary” attack, the attacker collects valid challenge
(from the attacker) response (from the key fob) pairs by
communicating directly with the transponder. These pairs are
placed in a look-up table or “dictionary” for future reference.
Equipped with this dictionary, the attacker then sequentially
triggers the vehicle for a challenge, which can be checked in
the dictionary for a valid response. If the protocol included a
100-bit response, one would need 251 trials to get one valid
challenge-response pair. The “birthday paradox” states that
after 2n/2 logged challenge-response pairs and
2n/2 trials, the probability of a valid result is 0.5. Using this,
it can be shown that the overall complexity of this attack is
2n/2+1 = 251. Countermeasures to consider in this case are:
• Increasing the challenge bit length to add complexity
• Implementing a bilateral authentication protocol
Automotive Compilation Vol. 7
• Randomization of clock frequency and operation
• Interleaving of digital control and the encryption
operation
“Invasive” attacks dwell on the physical implementation
of the encryption-related circuitry on the silicon die itself.
The best countermeasures are fairly simple to implement as
long as they are considered early in the design process. The
following are examples of steps that could be considered:
• Metal shielding of memory blocks
• Using non-standard synthesis libraries
• Scrambling the location of critical digital elements used
during encryption
• Restricting memory access and automatic chip-erase
function if attempted
System Performance Considerations
Current Consumption
System performance has different aspects. One is the power
consumption of the key fob. This parameter relates directly
to the achievable communication distance between key
fob and vehicle base station. Car manufacturers and Tier1
suppliers tend to emphasize the importance of the coupling
factor as a critical system parameter. However, it mainly
represents the relationship of the mechanical dimensions
between the key fob’s antenna and the vehicle base station’s
antenna. This parameter is only valid for a given system
configuration and depends on antenna inductance, Q-factor,
driver current, reader sensitivity, and ignition lock cylinder
material. Because of this, use of this parameter alone to
compare different systems is inadequate. Of equal if not more
importance than the coupling factor is current consumption,
especially given that the key side current consumption is a
limiting factor in a passive, batteryless environment where
10
the energy is harvested from a magnetic field and stored in
a small capacitor. By selecting system components designed
for extremely low power consumption and microcontrollers
capable of being programmed with well-balanced
software (putting the controller in sleep mode whenever
possible), the engineer is able to overcome earlier system
disadvantages requiring high coupling factors to compensate
for high current consumption in the key fob.
Authentication Response Time
Another important factor in immobilizer systems is the time
it takes from turning the key fob inserted inside the lock until
the engine starts. This time should be short enough to avoid
the driver’s perception of a delay. Depending on mechanical
and electrical system design and how quick a person can
introduce and turn the key, an overall timing budget in the
range of 300ms to 500ms is typically available. A significant
part of this budget is consumed through mechanics and
overhead in the body control module. What remains is
between 100ms and 200ms for the authentication process. A
good compromise in terms of speed and security seems to be
a bilateral authentication with a challenge length of 100 bits
and a response length of 56 bits. In most systems this results
in a response time of under 100ms.
Error Handling
In case an authentication failed for whatever reason, today’s
systems require the complete authentication cycle to restart
from the beginning and allowing a maximum of three retries
within a reasonable time. The retry strategy from Atmel®
looks a bit different and enables the system to recover from
communication errors more quickly. All commands and
optionally the data are protected by a Cyclic Redundancy
Check (CRC). Both the key fob and the base station can
make use of the CRC to detect errors and signal these
conditions to their respective communication partner. This
enables the base station to be selective about the amount
of repeated info, the last action, the last response, or the
last command. This feature enables quicker communication
recovery and more attempts at communication recovery
in the same amount of time (five-seven retries instead of
three).
11
Summary
By selecting system components that meet the security
and performance expectations of the automotive market
place, and support a highly configurable and open-source
immobilizer software stack, the task of developing a robust
vehicle immobilizer system can be greatly simplified. As a
leader in automotive vehicle access solutions, Atmel offers
such a complete system solution consisting of both hardware
and software.
Key fob designs can be realized with the Atmel ATA5580 and
the Atmel ATA5795. These devices boast an LF front end, an
AES hardware block to perform fast and efficient encryption
calculations, coupled with an Atmel AVR® microcontroller that
has been optimized for extremely low current operation.
Both include programmable flash memory that can be used to
run the Atmel open immobilizer protocol or other customerspecific software and are capable of completely passive
immobilizer operation.
A base station can be realized with the Atmel ATA5272. This
device integrates the LF base-station function with an AVR
microcontroller with 8K of programmable flash memory.
As a final complement to these devices, the open immobilizer
protocol software from Atmel is available to users at no
cost. It provides an unprecedented level of configurability
including many user selectable features enabling the dynamic
evaluation of system parametric tradeoffs and accelerates the
development and optimization process:
1. A logical layer with uplink and downlink baud rate, bit
encoding, and modulation depth
2. A protocol layer with challenge and response bit
lengths, unilateral or bilateral authentication, data field
CRC, two secret keys, secure or open Key Learn
3. A cryptographic layer with AES crypto clock speed from
125 kHz to 4 MHz “on the fly”
© 2010 / www.atmel.com
Automotive LIN
Bus Driving Sensor
Applications
Dr. Stephan Hartmann
Today’s cars contain, on average, more than 50 different
sensors to monitor various physical variables . This number is
growing, driven mainly by the proliferation of actuators, which
require sensors to deliver the relevant input values . In addition,
requirements for signal systems are now increasing, and analog
data transfer techniques are showing their limitations . The
engineer now faces the challenge of transforming the sensor
area into an efficient, high-performance digital subsystem .
LIN bus driving sensor technology enables efficient management
of digital data, combining the benefits of existing voltage
modulation and current modulation approaches . Atmel®
provides all necessary products independent of the integration
level of LIN applications .
Automotive Compilation Vol. 7
12
Sensor systems differ in many respects from other electronic
components of the car. The most important difference is
that sensors are mostly located outside the vehicle in harsh
environments where they are subject to changes in humidity,
temperature or pressure. In most cases, sensors also have
to be mounted in areas with very limited space and are
connected with a 2- or 3-wire harness.
pull-up resistor. For the connection to the sensor, a 2-wire
connection is used. Disadvantages include thermal power
dissipation in the sensor module, as well as a limited data
rate dominated by the pull-up resistor. Other current-based
transfer methods, such as Manchester-coded protocols,
require dedicated transceiver ICs, driving system costs up.
The Applications for Sensors are as Diverse
as the Application Areas Themselves:
• In the comfort area:
- Temperature sensors
- Solar altitude sensors
- Light sensors
- Humidity sensors
- Dew point sensors
• In the powertrain area:
- Position sensors
- Speed sensors
- Pressure sensors
- Knock sensors
• In the body control area:
- Pressure sensors
- Gyro sensors
A typical sensor node contains the sensing element itself, a
microcontroller for signal conditioning, and a transceiver for
signal transmission. As the length of the data line is often
more than 1m, the data transfer is dominated by analog
signal conditioning which has a portion of about 90%.
Analog signal conditioning does have some advantages.
It is compatible with previously existing mechanical or
electromechanical detection systems, and is also easy
to use and to plug in. Analog data can be provided in a
voltage range of, for example, 0 to 5V and the sensor can
then be monitored by an ADC port on a microcontroller
which converts the data into the digital domain. Generally,
however, requirements for sensor systems are increasing,
making analog signal conditioning less attractive. With ADC
resolutions up to 10 Bit, and the ability to indicate two
different types of failure modes by clamping the signal
voltage either to the lowest or to the highest voltage levels,
analog techniques have already reached the limits of their
performance and will be replaced by different types of digital
data transfer.
Digital data transfer can be managed either by voltage
modulation or current modulation. Both types have
advantages and disadvantages. Simple current modulation
allows a very cost-efficient design of the ECU as well as of
the wiring harness. Inside the ECU, the different current
levels can be transferred into voltage levels using a single
13
Figure 1. Basic Current Interface Set-up
Voltage modulation has the advantage of allowing a variety of
protocols, beginning with simple PWM and moving to more
complex versions like SENT, which have higher data rates
than current modulation. Additionally, the ECU input can be
designed as a capture compare unit on a timer basis. The
main drawback of voltage modulation is that a wiring harness
with a 3-wire connection is mandatory. Further issues may
arise at EMC testing because most PWM drivers do not
include a slope rate control. Additionally, ESD protection is
low.
Figure 2. Basic Voltage Interface Set-up
The LIN bus protocol combines all advantages described
above. As a two-wire interface, LIN helps save cost in the
wiring harness. LIN’s slew rate control in the transceiver
ICs supports excellent EMC performance, while LIN’s ESD
protection features allow robust system designs suitable for
harsh environments. Finally, the high production volumes
© 2010 / www.atmel.com
for LIN bus transceivers lead to very cost-efficient designs
compared to other protocols requiring transceiver ICs (e.g.,
current-based transfer protocols).
and a microcontroller for signal conditioning and protocol
handling. Atmel® serves all integration levels with LIN
transceivers, LIN system basis chips (SBCs), and LIN
system-in-package (SiP) devices. With SiP, the customer
benefits from the ultra low-power designs of Atmel AVR®
microcontrollers with Atmel picoPower® technology. As a
second step, the designs can be converted into single-chip,
multi-die SiP designs. This saves PCB space and allows the
engineer to include all electronics in the connector of the
sensor element. Finally, by integrating the sensor element
into the chip, and by implementing an intelligent state
machine, the engineer takes a further step toward advanced,
single-chip LIN sensor node designs.
Figure 3. LIN Interface Set-up Modified to Support the Current Supply of the LIN Sensor Slave
UC
The concept for the system design specifies a pull-up resistor
at the ECU level. This is required to control the current supply
for the LIN slave sensor through the data line. At the LIN
slave sensor, only a buffer capacitor is required. Depending
on the capacitor value, the data rate can be chosen up to 100
kbit/s. Supply voltage reduction provides an additional option
for influencing the data transmission speed. As the dominant
and recessive levels are referenced to the supply voltage,
a reduction of the supply voltage directly reduces the gap
between bus low and high level (the delta) to reach the
correspondent levels. A 2V supply voltage reduction leads to
an increase in the data transmission rate of roughly 15%.
Unfortunately, the supply voltage cannot be lowered in all
cases. The time portion of the bus-dominant level must also
be considered, as this state discharges the buffer capacity of
the LIN slave sensor
Sensor system design using LIN can be viewed as a threestep process. First approaches to a discrete slave-node
design include a sensing element, a LIN system basis chip,
Voltage
99%
98%
95%
86%
63%
t
1τ
2τ
3τ
4τ
5τ
1τ
2τ
3τ
4τ
5τ
Figure 5. Capacity Discharge Depending on the Bus-dominant State Time
In summary, LIN not only enhances the driving of cars
from the in-vehicle networking point of view, it also allows
the rumble change of the sensor area to a cost-efficient
and high-performing digital sub-system. Atmel offers all
necessary products regardless of the integration level of
LIN applications. To support low-power designs, the AVR
microcontroller with picoPower technology is key. In addition,
engineers can design the most robust and EMV-tolerant
systems with the leading-edge EMC and ESD performance of
LIN transceivers and SBCs from Atmel.
20
18
16
Special thanks to Daniel Yordanov and Keith Nicholson
for supporting me during the writing of this article.
14
12
10
8
VCC
6
LINH
4
2
LINL
0
Figure 4. Bus Level States Bus Level States Depending on the Supply Voltage
Automotive Compilation Vol. 7
14
Designing
Next-Generation
Key Fobs
Paul Lepek
Key Fobs Today
915MHz). However, for a PE system the LF downlink is
used by the key fob to compute a Received Signal Strength
Indicator (RSSI) value and thus the fob’s physical coordinates
in relation to the vehicle while the RF link is used to execute
the authentication protocol with the vehicle. RKE and PE
system fobs are designed to be powered by a small coin
battery intended to last for the life of the vehicle.
Today’s key fobs can be generally subdivided into two
different functional categories. The first includes Remote
Keyless Entry (RKE) devices which require some sort of
human intervention or a physical interface of the user to the
key fob (e.g., key push) in order for the fob to produce the
desired function effect such as unlocking a door or
opening a sunroof. The second group of devices
provides similar functionality but also features an
Atmel has Introduced Next-Generation Transceiver
added level of comfort by performing the same
and Receiver Devices with Configurable Options
function without physical intervention by the user.
Instead of the push button or touch sensor interface,
a Passive Entry (PE) identifies the user (and the
Moreover, all key fobs support engine immobilizer system
key fob) as a legitimate entity and automatically triggers
authentication. To prevent theft every automobile uses an
authentication or issues a request (e.g., passive door unlock,
immobilizer system which authenticates engine starts. In
trunk release, etc.).
this case the key fob acts as a passive authentication tag
Both systems are based on a preprogrammed key fob device
similar to the RFID tag but with a larger feature set. Most
ID and authentication protocols which include an encryption
automotive key fobs use Near Field Communication (NFC)
stage for authorizing the issue of key fob commands to the
transponders which communicate with the engine controller.
vehicle. In this way the key can be identified by the vehicle
The transponder is integrated into the key and is a passive
and vice versa before any action is executed. All RKE-based
device. It does not need a battery for operation, but instead
systems require key fobs to support RF links which fall into
uses a magnetic field generated by the LF vehicle coil. It also
Industrial, Scientific and Medical (ISM) frequency bands
transmits the device ID and executes a special immobilizer
(i.e., 0 - 135kHz, 13.56MHz, 315/433MHz, 869MHz, and
15
© 2010 / www.atmel.com
Table 1 . Key Fob Features Today
Class
Immobilizer1
Physical Interface 3
(Button, Touch, etc.)
Batttery/
Recharge2
Remote
Start
Remote Entry
Accessories
Passive
(Entry/Go)
Accessories
Personalization
Settings
Time/
Data Logging
in Fob4
x
Basic
x
-
-
-
-
-
x
RKE (std.)
x
x/
x
-
-
-
x
RKE (ext.)
x
x/x
x
-
x
-
x
PE (std.)
x
x/x
x
x
x
x/x
x
PE (ext.)
x
x/x
x
x
x
x/x
x
x
x
Immobilizer support includes secure fob and vehicle authentication via the LF field using an integrated LF transponder.
1
The fob includes a built-in battery with the option of recharging the battery via the LF field.
2
Remote Start and Remote Entry are controlled via RF uni- or bi-directional link. Control of accessories can either be done using RF or IrDA links.
3
4
Data can be logged such as time stamp data, last device ID, last vehicle service date, and much more either via LF or RF links.
protocol for its authentication but all communication takes
place via an LF field generated by the vehicle.
Expanding Fob Applications
Originally key fobs were designed for only one purpose:
to unlock the door and start the engine with the metal
key. Later, RKE devices were used to remotely (HF
field) unlock the door. The integrated contactless passive
transponder (LF field) then unlocked the steering column
and enabled the engine start.
Only more recently fobs began to penetrate convenience,
general utilities, secure communications, and secure access
ID applications (even extending to payment systems and
e-ticketing). These functions were not developed before
due to a lack of hardware and software resources, primarily
because of the fob’s physical size and power consumption.
Recently, however, it has become possible to overcome
these shortcomings by incorporating much larger user and
program memories, and the use of faster, more compact,
and ultra-low power processors without increasing the
cost of production. Additionally, the integration of flexible,
reconfigurable, and secure authentication peripherals can
be made feasible. These types of peripherals include crypto
units, secure key management features, and integration
of smart cards useful for payment, user ID, and cipherbased authentication systems. An automotive key fob can
therefore be used not only to interact with the vehicle but
Automotive Compilation Vol. 7
also to gain entry to a park garage, ski lift or to purchase
train tickets. This can deliver considerable benefits when
goods are purchased using one of the major credit card
networks. The secure user memory can also be used to
store personal and secure information as personal data ID
and provide transit information for e-ticketing.
System-in-fob Hardware Resources
• Ultra-low-power 8-bit microcontroller
• Large Flash program and EEPROM data memory
(memory segmentation with locks)
• RF communication interfaces
- Infrared (IrDA) IF
- Immobilizer IF at 125kHz
- Passive entry IF at 125kHz (RX only)
- Smart card IF at 13.5MHz
- RKE IF at 315, 413, 868, 915MHz
(frequency hopping)
• Power management (optional battery charge)
• Hardware cryptological unit (AES-128)
• Integrated proximity coupling smart card (ISO 14443)
• Cyclic Redundancy Check (CRC) block
• Serial interfaces (SPI, SSI)
• ISP/debug (dW)
• Analog comparator
• Flexible GP timers and WDT
• Oscillators: RTC, INTRC (125kHz, 4MHz)
16
The heart of a modern key is an ultra-low power
microcontroller with sufficient program and data memories.
Typical program memory can range from 8KB to 16KB
and beyond with its data memory ranging from 1KB to
2KB depending on application requirements. Because of
secure application support, the key fob’s program and data
memories must have provisions for memory segmentation
and locks in both memory blocks. For example, the
application firmware resident in program memory can be
divided into separate memory sectors (e.g., application and
immobilizer sections). Also data memory may have its own
partitioning which can allow for soft and hard memory locks
when it comes to releasing user-sensitive device-stored
data (e.g., authorization password or secure key). While
the microcontroller core executes application firmware, the
secure user and key data is stored in the on-chip nonvolatile
memories (EEPROM).
The core uses various wireless communication peripheral
interfaces to communicate with the infrared transceiver
(IrDA), the LF transponder (125kHz), the 3D LF receiver
(125kHz), the smart card (13.5MHz) and the RKE
transceiver (315, 413, 868, 915MHz). Flexible serial
interfaces can be shared such as SPI or Serial Synchronous
Interface (SSI) to enable data exchange with every
communication peripheral. A hardware data integrity check
module, based on a Cyclic Redundancy Check (CRC)
checksum algorithm, supports validation of received data.
The fob must also contain analog peripherals such as internal
oscillators where F = 125 kHz and 4 MHz to generate its
internal clock signals used for the transponder front end and
the microcontroller core, respectively, with low frequency
deviation across VDD and temperature. The supplied analog
comparator can facilitate detection of VDD drops and prevent
data corruption during nonvolatile data memory writes in
passive mode.
Power
Management
SPI
FRC -Oscillator
Contactless
Interface/
Transponder
EEPROM/
2KB
RTC
3D LF Receiver
Volt. Monitor
ECIN
Clock
Management
& Monitoring
Contactless
Interface/
SmartCard
SRC Oscillator
Smart
Card
Atmel AVR - Core
Watchdog
Timer
IR - Driver
Timer Block
Crypto Unit
PM – ROM
2kB
SRAM
512B
Data Mem.
Secure
EEPROM
.
CRC
POR / BOD &
RESET
PM - Flash
14kB
debug WIRE
RF
TX/TRX
Module
Serial IF
IO-Ports
Figure 1. Fob Floor Plan
A unique feature of the immobilizer transponder interface
is that it is closely bound to the power management unit
which is used to provide power supply voltage, VDD, while
exchanging LF data with the immobilizer in passive mode.
In this mode all other communication with the key fob is
disabled to support batteryless operation. Some key fobs may
also support the battery charge feature which is integrated
into the power management module for recharging the
battery with the engine running.
Wireless Data Communication Interfaces
An entry/immobilizer system consists of at least two
communication partners where one side is on the vehicle
and the other on the key fob. Depending on the link type,
there are several possible communication interfaces available,
including:
1. IrDA link for convenience and comfort applications
While in secure smart card mode the device can also
operate in passive mode and exchange as well as encrypt
and decrypt proprietary data using its own crypto module
with the reader at FC = 13.5MHz. It can use its own device
memory or the fob’s internal nonvolatile memory.
Integrated crypto modules can support many different cipher
algorithms—the most popular being the 256-bit block cipher
known as the Advanced Encryption Standard (AES) based
on the Rijndael algorithm which can be used with a 128-bit,
196-bit or 256-bit secret key.
17
2. PE/PEG link to enter and start engine, including LF
downlinks and UHF uplinks
3. Immobilizer link to start engine and emergency vehicle
entry, including LF down- and uplinks
4. Chip card as user ID, authorization, authentication at pay
stations, including HF down- and uplinks
5. RKE as entry authentication, including UHF down- and
uplinks
© 2010 / www.atmel.com
Table 2 . Modern Key Fob Communication Links – Overview
Application
Standard
Link Type
FC
Modulation
Anticollision
Data
Encoding
BR [Baud]
Range
Average
Current
PE/PEG
Custom
3D LF
downlink
0130kHz
ASK
x
PIE
3.9k
3 - 5m
2 - 20μA
UHF uplink
315, 433,
868,
915MHz
ASK/FSK
-
Manchester,
Biphase
Up to 80k
30 - 120m
8 - 20mA
LF downlink
0130kHz
ASK
-
PIE
3.1 -8.9k
2 - 10cm
40 - 260μA
Manchester
4.4k
PIE, Miller,
NRZ
Up to 20k
5 - 20cm
20 - 120μa
Up to 80k
30 - 120m
8 - 20mA
Immobilizer/
Emergency
Entry
ISO14223
/Custom
LF uplink
Chip Card
ISO14443
ISO15693
ISO18000
HF
downlink
ASK
13.56MHz
HF uplink
RKE
Custom
UHF
downlink
ASK/PSK
x
ASK/BPSK
315, 433,
868,
915MHz
ASK/FSK/
PSK
Manchester,
NRZ
x
Manchester,
Biphase
UHF uplink
VBAT=1 & VFLD=0
(Start-up)
The summary of the communication channels and a brief
overview is shown in table 2.
Enter RKE Mode
RKE
Secure and Reconfigurable Firmware
Application firmware which supports the complete
functionality and feature set is the fundamental building block
of the key fob. It may consist of many different modules and
must encompass all functional and likely operating scenarios,
including battery failure which comprises emergency or
passive operation mode. To improve reliability it is a common
practice to keep both application and immobilizer programs
separate and in two distinct program spaces. While the
immobilizer firmware supports distinct engine starts, the
application software controls all other fob functionalities
including RKE, convenience or user-ID applications. The
immobilizer/emergency functionality is required to take
priority over any other function, which is the equivalent of an
override which suspends any function currently in progress
when the LF field is detected at the transponder LF coil.
Figure 2 depicts a flow diagram and interaction between
application and immobilizer firmware.
Automotive Compilation Vol. 7
APPLICATION SW
MODULE
VFLD?
Yes
No
VBAT=0 & VFLD=1
(Start-up)
Enter IMMO. Mode
IMMOBILIZER
APPLICATIONSW
MODULE
VFLD?
No
Yes
Figure 2. Immobilizer and Application Firmware Interaction Flow Chart
All data communication is fully supported in the fob’s
firmware. Various communication protocols including
unilateral, bilateral for immobilizer, PE/PEG and RKE systems
can be fully configured by the application software. Based on
18
A major advantage of a next-generation key fob is its in-field
programmability, which can be very helpful in the event of a
firmware or user data upgrade or programming. The fob can
be initially configured using its dedicated general-purpose
software via the LF field while the final test is performed at
the factory. The user data can be added later by the Tier1
or OEM without modifying the original configuration. Even
while in the field the fobs can be reprogrammed with new
Coupling
Factors
for Immobilizer
SystemSystem
Coupling
Factors
for Immobilizer
9.00%
8.00%
7.00%
Coupling factor [%]
protocol topology, the application software controls dedicated
peripherals by enabling them, and reading data during RX
phases, and writing data during TX phases of the protocol as
soft triggers (e.g., immobilizer and PE applications) or hard
triggers (e.g., RKE or IrDA applications using a push button
interface).
6.00%
5.00%
4.00%
3.00%
2.00%
1.00%
0.00%
0
0.02
Distance d [m]
Abstraction Level
Software Model
Figure 4. Immobilizer Coupling
Application Layer
Protocol/Session Layer
API, Configuration
Data I/O
Transport/Link Layer
Physical Drivers
Resources
Figure 3. Software Partitioning as a Bottom-up Approach
application and user data via one of the communication
interfaces at a later date. Of course, in this case only a single
functionality can be enabled while using memory locks to
provide security. This is especially useful when used as a pay
token in e-commerce or e-ticketing environments.
0.04
0.06
0.08
Lr=Rehfeld, Lt=2.45mH
Lr=Rehfeld, Lt=5.1mH
Lr=738uH, Lt=2.45mH
Lr=738uH, Lt=5.1mH
Figure 5 shows one complete challenge-response
authentication protocol which could be used in a passive
automotive immobilizer application. The LF field voltage
(green) is enabled for 160ms. The field is damped (2.2V)
during RX state and then switched to the undamped
level (6V) during TX state. The charge storage capacitor
voltage (yellow) which provides VDD to the transponder is
immediately charged to 2.2V during the RX data stage. The
transponder encrypts (AES-128) received plain text data
(128-bit challenge) and transmits the response. In many
immobilizer systems the system authentication time is a
major concern. To minimize authentication time, the number
of bits transmitted can be reduced without compromising
system security. It is common for authentication time
TAUT < 130ms at BR = ~3.9kBaud.
Transponder LF Field Coupling
Transponder-to-base-station coupling still remains the most
challenging aspect for key fobs. The proper transponder
coupling can be achieved when sufficient energy is
transferred from the base station to the transponder for the
transponder to communicate with the base station. During
design, the L-C tank must be carefully selected for optimum
energy and communication performance. Figure 4 shows a
typical transponder coupling at 125kHz vs. operating distance
from the base station coil5.
Figure 5. Immobilizer Protocol Execution Scope Shot/Power Analysis
5
19
Assumes the fob coil is placed in the center of the base station coil where the coupling is best
© 2010 / www.atmel.com
Figure 6 shows field voltage and VCC traces as the key fob
is energized by the field and begins to receive a BPLM data
stream. Field gaps are visible which separate field ‘On’ interval
which is decoded by the fob using a dedicated hardware
peripheral. The fob’s microcontroller is in sleep mode 95% of
the time to save power consumption.
Table 3 . RF Transceiver Parameters
Sensitivity
Antenna
Gain
POUT
Average
Current
Receiver
-109dBm
-6dB
-
~6 - 8mA
Transmitter
-
-18dB
10dBm
~9 - 10mA
Table 3 shows some typical RF transceiver parameters.
A snapshot of the transmitter spectrum taken at 433MHz
during transmission of an RKE message to the vehicle is
shown in Figure 7. The transmitter carrier frequency, the
span, power output, and device setting are configured using
the serial interface by shifting configuration data (in this case
the 32-bit configuration word) into the RF transmitter via the
MCU when the user presses the open-door button.
Figure 6. Transponder at Power-up
RF Communication Links
Both RKE and PE/PEG systems utilize HF communications
links. In comparison to LF links, HF links are superior in their
operating range (up to several hundred meters) and baud
rate (up to 80kBaud can be achieved). RF transceivers
currently available on the market use N-fractional PLL
frequency tuning techniques where the carrier frequency
can be selected in firmware by the MCU. Some devices allow
large tuning frequency variations, permitting more design
flexibility. The transceiver’s operating range remains a key
performance parameter. To extend operating range, it is
common for the transmitter power to be as high as 12.5dBm
and the receiver sensitivity to be less than -100dBm.
Antenna design is also a determining factor providing
additional performance gain. Although whip antennas add
additional performance gain, small loop antennas printed on
the PCB are usually chosen for use in automotive key fobs.
Power consumption is another critical factor on the receiver
as well as on the transmitter side. Power consumption can be
reduced by selecting higher data baud rates. Choosing ASK
modulation tends to lower operating current since the power
amplifier is momentarily disabled during modulation.
Automotive Compilation Vol. 7
Figure 7. RF TX Spectrum at 433MHz
References:
1. ISO 14223 – Advanced Transponders Standard
2. ISO 10536 – Close Coupling Smart Cards Standard
3. ISO 14443 – Proximity Coupling Smart Cards Standard
4. ISO 15693 – Vicinity Coupling Smart Cards Standard
5. ISO 18000 – Item Management Standard
20
Capacitive Proximity Detection in the
Automotive Industry
Luben Hristov
There has been a steady rise in demand for proximity
detection sensors in automotive applications which reliably
detect the presence of objects near the sensor surface
without physical contact and the number of possible
proximity detection applications is countless:
• Door entry control: detecting a hand approaching the
door handle to initiate the car unlocking process
• Illuminating and waking up the touchscreen when a
hand approaches the screen surface
• Switching interior car lights on/off when the hand is
near the sensor
• Detection of simple spatial gestures to switch devices
on/off
• Sensing the presence of large objects around the car
during parking
Many different proximity detection methods exist, for
example, capacitive, infrared, ultrasonic, optical, etc. For
the 5mm to 300mm proximity detection range, capacitive
21
sensing has many advantages compared to other methods:
excellent reliability, simple mechanical design, low-power
consumption, and low cost base. This article describes
capacitive proximity detection technology from Atmel®.
Atmel is a leading touch solutions manufacturer with many
years of experience in this field. The company’s capacitive
sensors are based on charge-transfer technology—a method
pioneered by Atmel where voltage is generated on the
sampling capacitor during the repetition of a specific control
sequence applied over the I/O pins. Atmel currently holds
multiple patents in the area of charge-transfer technology
for self-capacitance sensors (Atmel QTouch®) and mutualcapacitance sensors (Atmel® QMatrix). The Atmel chargetransfer technology delivers key benefits to the user and
offers advantages compared to other capacitive measuring
methods: increased flexibility, very high sensitivity,
excellent moisture resistance, and noise immunity.
QTouch and QMatrix technologies have been implemented in
multiple touch controllers supporting touch buttons, sliders,
wheels as well as touchscreens. Proximity detection support
is also available with some of the standard products. Atmel is
now developing and manufacturing new proximity algorithms
© 2010 / www.atmel.com
conductive surface as shown in Figure 1. Please refer to
the Atmel application note about using active shields at
http://www.atmel.com/dyn/resources/prod_documents/ankd02_103-touch_secrets.pdf, page 7. A further advantage of
active shields is their neutralizing effect on water films.
• Moisture resistivity: Moisture-induced changes in the
measured signals can be more significant than changes
from approaching objects. Water film on the surface is one
of the biggest problems for capacitive solutions. Water films
are more or less conductive and create a change of the
measured signals that is similar to normal touch events.
There are mainly two ways to handle effects caused by
water films:
1. Use of active shields (described above)
Figure 1. Active Shielding of Proximity Sensor
to increase sensitivity to support finger or hand detection
ranges of up to 200mm and more. The release of standard
products and software library modules is being planned for
2011 and 2012.
Capacitive proximity sensors measure the capacitance
change between the single electrode and ground (selfcapacitance sensors) or between two electrodes (mutual
capacitance sensors) as objects approach electrodes.
While constant capacitance is between 10pF to 300pF, the
capacitance changes are typically extremely small, ranging
from a few fF to several pF. Since the electrical field lines
around the self-capacitance sensors spread far away from
the sensing electrode, self capacitance is the preferred
proximity detection method over mutual capacitance where
field lines are largely concentrated in the area between the
transmitting and receiving electrodes.
Characteristics of Capacitive Proximity
Sensors For Automotive Applications:
• High sensitivity: Detecting small changes in the
measured capacitance requires increased and stable
sensitivity. Special measures should be taken to reduce
negative effects on sensitivity caused by capacitive
loading, especially if the sensing electrode is placed on
a conductive surface (metal plane, car body, etc.). An
active shield layer is used to reduce the negative effect
of capacitive loading between the electrode and the
Automotive Compilation Vol. 7
2. Shorter charge transfer time – the water film could be
utilized as a distributed RC circuit (as shown in Figure
2). Reduced charge transfer pulses will prevent full
charging of the distributed capacitors C and hence
reduce the impact of the water films. Best results can
be obtained if the charge transfer time is in the range
of 100ns to 250ns. A proper mechanical design of the
sense area and the use of the appropriate materials
prevent the emergence of thick water films on the
sensing area.
Figure 2. A Water Film Acting as a Distributed RC Circuit
• Temperature stability: In automotive applications extreme
and rapid temperature changes may occur at any time.
Special care should be taken with regards to a stable
mechanical design – even the smallest gap changes near
the conductive surfaces may cause false detection.
• Noise immunity: Due to the high sensitivity, noise
interference could compromise normal operation of the
proximity sensor. The electrical and mechanical design of
the PCB should be carried out to avoid noise interference
caused by adjacent cables or conductive surfaces.
• Fast response time: The expected response time is
usually between 10ms and 100ms
22
The following sections provide more detailed scenarios of
automotive capacitive proximity detection.
Door Entry System
One example of capacitive proximity detection is in car
door entry systems (see Figure 3). The proximity sensor
that detects hand approaches is located within the car door
handle (1). Once object proximity has been detected, the
main unit (2) sends a wake-up signal via the LF antenna
(3) which activates the car key transmitter (4). The car
key transmitter then exchanges information with the RFID
receiver (5) and – if the code matches the main control unit
(2) – the door is unlocked. The entire process of proximity
detection and ID recognition takes a fraction of a second.
This means when the hand pulls the door handle, the door is
already unlocked.
causes the light to switch on, a wave of the hand in the
opposite direction switches it off. The system is able to
analyze the signals from the proximity sensors and to decide
whether to switch the lamp on or off.
There are many different options available for designing
sensing electrodes inside a light – from using thin copper
wires to conductive polymers that can be applied directly
over the plastic.
The advantage of using proximity detection rather than touch
detection in door entry systems is the extended time to
identify a person. As a result, the door lock state will always
be resolved before the door handle is pulled.
Figure 4. Spatial Gestures for Switching Devices On/Off Inside the Car
Conclusions
• Implementation of capacitive proximity sensors in
automotive applications paves the way to a broad range
of comfort applications
Spatial Gestures to Switch
Devices On/Off
The simultaneous use of two or more capacitive proximity
sensors enables simple spatial gestures such as hand waving
in front of the device to be detected. Figure 4 shows a simple
example of such a system to switch lights on/off inside the
car – a wave of the hand in front of the light in one direction
23
Signal
Figure 3. Door Entry System with Proximity Detection
• Moisture and rapid temperature changes are the main
challenges for capacitive proximity sensors used in
automotive systems. These challenges can be overcome
by utilizing the most recent innovations in capacitive
sensing technology from Atmel.
Capacitive
ProximitySensor
L
L
R
R
© 2010 / www.atmel.com
Extending
the Range
of E-vehicles
with Li-ion
Batteries
Using Active
Balancing
Claus Mochel
Global warming has now become the main talking point of
our era, and electric or hybrid vehicles provide an excellent
way of saving fuel and reducing CO2 emissions. However,
electric and full hybrid vehicles have one particular Achilles
heel, which is the capacity of the battery and therefore
the limited range of these vehicles. The maximum battery
size that can be installed in a vehicle is limited because of
its volume and weight, making it all the more important to
make optimum use of the battery capacity that is available. In
order to provide the several hundred volts that are needed
in modern high-performance batteries for electric vehicles,
several individual battery cells are connected in series. Each
cell in a battery pack such as this differs from the others,
e.g. in terms of cell capacity, self-discharge rate, different
temperature characteristics and cell impedance – differences
that are intensified by the ageing effect of the battery. When
the cells are being charged, this leads to a situation whereby
some cells have not yet received their maximum possible
charge, but other cells are already fully charged. Unless
additional measures are taken the charging procedure has
to be aborted, since individual cells would otherwise be
overcharged, which would damage or possibly even destroy
the battery cells. The situation is similar with regard to
discharging. Whereas individual cells are already discharged,
others still contain enough energy to continue powering the
vehicle (in theory). However, the vehicle must not continue
to be driven, since the weaker cells would otherwise be overdischarged, which would lead to the destruction of these
cells. In order to avoid all of this, active balancing between the
individual battery cells is required.
Automotive Compilation Vol. 7
Passive Methods Convert Valuable
Energy Into Heat Loss
The method that is most widely used at present is passive
balancing, in which cells that are already fully charged are
discharged again using a resistor so that the other cells can
continue to be charged. The disadvantages of this method are
obvious:
• Cells can only be discharged for the purpose of balancing
• The discharge current causes power loss in the bypass
resistor
• Valuable energy is converted into heat and is no longer
available for powering the vehicle
• The range of the vehicle is reduced
While the passive balancing method only converts the energy
that is stored in the cells into heat loss, active balancing
enables to transfer the charge from one cell to another.
There are several ways of achieving this charge transfer, e.g.
using switched capacitors or inductors. When the capacitive
method is used, a capacitor is connected in parallel with the
cell with the higher voltage. Once this has been charged, it is
connected in parallel with the cell with the lower voltage and
can charge it up. This procedure is repeated until the same
voltage is present at both cells.
The method that uses capacitors is extremely cost-effective,
but has the disadvantage that the average balancing current
is limited to less than 50mA. This limitation does not exist
24
MBAT7
MBATn+2
DISCH6
MBAT6
DISCH5
RIN
PMOS
Zelle n+1
MBAT4
CSHUFFLE
MBATn+2
CIN
Zelle n+1
DISCHn-+1
MBAT5
DISCH4
RIN
PMOS
CIN
NMOS
RPD
DISCHn-+1
CSHUFFLE
NMOS
RPD
MBATn+1
MBATn+1
DISCH3
MBAT3
Zelle n
DISCH2
DISCHn
Zelle n
DISCHn
MBAT2
MBATn
DISCH1
MBAT1
Figure 1. Passive Balancing Using Resistors
Figure 2. Active Balancing Capacitors
with the inductive method, and in this case it is easily
possible to have balancing currents of 1A or more.
Active Balancing Method for Rapid and
Almost Loss-free Charge Transfer
Active balancing is realized by connecting an inductive
resistor in parallel with the cell from which the charge is to be
taken. This results in a constant increase in the current flow in
the coil.
Once the coil has been decoupled from the cell that is being
discharged via a transistor, the energy stored in the cell can
charge the neighboring cell via a diode. It is therefore possible
to move charges to and fro between the individual cells
extremely efficiently and almost loss-free. This method
has some decisive advantages:
• Balancing currents of 1A and more are possible
• Balancing is essentially loss-free
• Balancing is extremely rapid
• The efficiency and the capacity of the battery are
increased
• The range of the vehicle is increased
Compared to the other methods that have been mentioned,
implementing an active balancing method using inductive
resistors is not exactly low-cost because of the relatively
high cost of the inductive resistor component. However, this
25
MBATn
is not really a problem. A
modern high-performance
battery currently costs
approximately USD
$10,000 Even if only
gaining an extra 10% of
capacity using the inductive
balancing method, this
represents a value of
USD $1,000 – an amount
for which a considerable
number of inductive
resistors can be purchased.
1 = Discharging a cell
2 = Charging a neighboring cell
Cell n
Cell n-1
1
2
Figure 3. Active Balancing
Using Inductors
Individual cell monitoring
is required for Li-ion batteries for safety reasons, since these
cells burn when they are overloaded, and can even explode
in extreme cases. As well as the overvoltage, undervoltage
and temperature monitoring that is required, additional
functions such as precise charge condition determination are
needed. A component is now available on the semiconductor
market with which both these functions and also the
different balancing methods can be realized. With the Atmel®
ATA6870, each cell has individual electronic monitoring
in order to provide functions such as state-of-charge
determination, active/passive balancing or overvoltage,
undervoltage and temperature monitoring.
© 2010 / www.atmel.com
Measurement Data Recording and
Active Balancing for Li-ion Battery
Systems
is the world’s only device with the possibility of achieving
both passive balancing and active balancing between the
individual cells using capacitors or inductive resistors in
high-performance batteries with up to 300 cells or more
connected in series. In order to prevent the balancing from
taking an extremely long time because of the large number
of cells, balancing can be carried out simultaneously on
any number of cells with the ATA6870. With the aid of this
circuit it is now possible to develop low-cost, efficient and
safe battery management systems that can squeeze the last
Coulomb out of a battery due to extremely precise recording
of the charge status of the individual cells and the efficiency
of the balancing method that is used, and make it available
for driving operation. This is another step that increases
the range of electric vehicles and plug-in hybrid vehicles
and therefore contributes to the triumphant march of these
vehicles.
Cell 1
Reference
ADC
Charge Transfer
Digital Level
Converter
The heart of the Atmel® ATA6870 consists of six highprecision 12-bit AD converters. Each cell is monitored by
a separate AD converter, which has several advantages.
On the one hand, all cells can be measured simultaneously,
and on the other hand the cell voltage does not have to
be transferred analog to ground, which would reduce
the accuracy of the system. As well as providing efficient
balancing, another prerequisite for making optimum use
of the cell capacity is precise recording of the cell voltage
because of the extremely flat characteristic curve of Li-ion
battery cells. The ATA6870 therefore transfers the digital
voltage value to ground without loss of accuracy after
analog/digital conversion. As well as the six high-precision
AD converters for measuring cell voltage, the ATA6870
Standby
3.3V
Voltage Regulator
Logic
Cell 6
Reference
ADC
Charge Transfer
Digital Level
Converter
3.3V Internal
Voltage Regulator
Current Supply
Cell Temperature
Measurement
Digital Level
Converter
Communications
Bus
Microcontroller
Interface
Microcontroller
Figure 4. Block Diagram of the Atmel ATA6870 Li-ion Battery Management IC
Automotive Compilation Vol. 7
26
Precision
Battery
Monitors for
Standard Lead
Acid Batteries
Ensure Engine
Start-up
Claus Mochel
Today, one in three car breakdowns
is related to the vehicle’s electronic
equipment. Today, high-end cars
incorporate up to 65 electronic control
units (ECUs), compared to only 10
ECUs in 1995. Battery monitoring is
one of the most important current ECU
applications, since 60% of breakdowns
caused by electronic devices are
caused by defective or empty
batteries.
Batteries now face many challenges
for energy management. Formerly,
the battery’s main task was to provide
high-power output for a short time
to enable engine start-up. This has
changed dramatically, Today, the
battery must provide continuous
power to the large number of
electronic devices inside the car. This
function can be problematic in winter,
when battery capability is reduced
through cold temperatures and high
energy consumption due to loads such
as electrical seat heating. In addition,
driving in slow traffic means that the
car generator provides limited energy
to charge the lead acid battery.
27
27
Concerns about global warming, along with resulting stringent legal provisions for
reduction of vehicle CO2 emissions, are driving an additional challenge for energy
management: micro-hybrids. These cars save fuel by switching off the combustion
engine when stopping (for example, at a traffic light) and then automatically
restarting the motor when the driver wants to continue. The primary issue with
such an engine is that the vehicle’s starting capability must be guaranteed under
all circumstances. Otherwise, traffic chaos is bound to develop, given the growing
number of vehicles of this kind on city streets. With the advent of micro-hybrids,
reliable battery diagnosis and modern vehicle energy management become all
the more important.
The core of such an energy management system is an intelligent battery sensor
(IBS) to constantly monitor the charge and discharge currents, the battery
voltage, and the temperature. The resulting data is used to determine the
battery’s load and state-of-charge and for distributing power within the car.
Priority is given to critical functions such as engine start-up. Furthermore, the
sensor calculates the battery’s state-of-health (SoH) and alerts the driver when
battery lifetime is expiring in order to avoid car malfunction or breakdown. With
IBS information, engineers can also reduce fuel consumption and resulting CO2
emissions. This is done by tailoring the charging cycles depending on the required
current for the various loads and the energy available from the generator. In
cars without an IBS energy management system, the generator must provide a
continuous electrical charge for the battery while the motor is running; with such
a system, the generator can be disconnected from the battery when the battery
charge is sufficient and the vehicle’s engine is under heavy load.
© 2010 / www.atmel.com
Atmel® has provided initial models of a microcontroller
perfectly matching the requirements of an advanced IBS
system. The device is based on the well-known Atmel
AVR® microcontroller core in Atmel products, with additional
mathematical extensions adapted to the requirements of
battery management systems. The circuit has two 16-bit
Σ-Δ analog-to-digital converters (ADCs) with synchronous
sampling; the accuracy of these two ADCs is due to a very
precise 5ppm/K reference voltage with special second-order
temperature compensation. The first ADC is dedicated to
current measurement and has a large dynamic range. Using
a 100μOhm shunt resistor, currents from 1mA up to 1500A
can be measured due to a programmable gain amplifier
(PGA) at the input of the ADC. The second ADC is dedicated
to system temperature determination and monitoring of the
voltage of the lead acid battery. The temperature can be
measured using either the IC’s in-built temperature sensor
or an external sensor. The measurement of battery voltage
measurement is particularly interesting. This measurement
requires an extremely precise resistor divider, which is
integrated into the device. As a special feature, the divider
can be connected directly to the battery pole to enable
precise voltage measurement without failures caused by a
reverse protection diode or other protection devices. This
is very important because systems require reliable battery
data regarding state-of-charge and state-of-health. Reverse
polarity protection at this pin also poses no problems because
the device is based on SOI (silicon-on-insulator) technology.
SOI enables the design of circuits operating at voltage levels
lower than substrate voltage, since SOI devices are isolated
by an oxide instead of P-N junctions, which avoids issues
with parasitic diodes and transistors.
The microcontroller device also has some additional features.
First, due to its integrated voltage regulator, it is able to
directly use the vehicle’s power net for operation. Second,
it is available with 32kB and 64kB flash memory. Third,
in addition to the in-built power supply, it incorporates
a LIN transceiver based on the Atmel LIN transceiver
IP with excellent electromagnetic compatibility (EMC)
characteristics. Atmel products based on this LIN IP have
received approval from nearly every OEM worldwide,
ensuring smooth integration into a vehicle network. Fourth,
Atmel provides a version of this microcontroller without a
voltage regulator or LIN transceiver for systems that handle
these functionalities externally. Finally, due to the restricted
space and harsh environment of IBS applications, Atmel
provides the ICs in a robust QFN 7 x 7mm package. This
enables customers to design intelligent battery sensors
the size of a postage stamp, which fit into the pole niche of
almost any standard lead acid battery.
In conclusion, the new microcontroller device from Atmel
provides an advanced intelligent battery sensor system to
ensure starting capability in today’s vehicles, including microhybrids.
16-bit
S D ADC
Voltage
Regulator
Oscillators
Temperature
Automotive Compilation Vol. 7
-
Shunt
Timer/Counter
Reference
Low-power
Atmel
AVR CPU
+
Watchdog
16-bit
S D ADC
LIN
Transceiver
to LIN Bus
Supervision
and
Diagnostics
28
DC and BLDC Motor Control ICs
Klaus Schweizer
Atmel® has more than 25 years of in-depth
automotive design expertise. The automotive specialist
supplies drivers, predrivers, microcontrollers, and
software for DC and brushless DC (BLDC) motor
control solutions. This article describes Atmel system
basis predriver ICs and emphasizes its most recently
developed BLDC motor driver device.
One of the key fields Atmel specializes in is application
development for controlling brushed DC motors.
There are a large number of suppliers offering a wide
variety of automotive-qualified DC motors. Automotive
applications continue to see a high demand for
brushed DC motors. In most cases, these durable
motors, based on proven technology, meet the
customers’ application requirements and failure rates
are low. But brushless DC motor applications are now
emerging, and market analysts have assigned them
the highest growth rate. The extended functionalities of
BLDC motors are becoming more attractive.
29
Regardless of whether DC-brush or brushless
DC motors are used, the challenge in electronic
motor control is to design for new functionality
while maintaining reliability and high-performance.
Atmel smart drivers and bridges enable a myriad of
electronic applications. Manufactured using 0.8μm
BCD-on-SOI process technology, they support
operation up to 40V and can be optimized for motor
control applications in harsh environments such as the
engine compartment.
The Atmel systems basis predriver ICs are of particular
interest in managing the shift to brushless motors.
To enable new, additional BLDC motor applications,
a next generation of advanced system basis B6
predrivers has been developed. Together with Atmel
microcontrollers and software, these predrivers will
support successful design of future BLDC motor
control ICs.
© 2010 / www.atmel.com
Brushed DC Motor Advantages
Brushed DC motors are a proven technology offering several
advantages. In addition to low initial cost, brushed DC
motors also stand out for their reliability, the high volume of
production possible with this technology, as well as the ease
with which brushed DC motor speed can be controlled.
The low initial cost involved is perhaps the most important
benefit. Customers still prefer brushed motor control in pricesensitive applications, which comprise almost all convenience
electronics in small and mid-sized vehicles. In addition, many
functions in this environment still run without semiconductor
driver ICs, making them simpler and cheaper.
Brushed DC Motor Disadvantages
On the other hand, this technology has its drawbacks. One
disadvantage is that carbon brush wear can reduce the
motor’s service life. Also, brush fire of the DC motor may
cause EMI.
In addition, as indicated above, the low effort and cost of
electronic control with brushed DC motors is associated with
the use of relays, and a trend is underway to replace relays
with transistors. While relays have sufficient reliability in most
cases, particularly when motors are rarely switched on, they
do have disadvantages. Transistors are increasingly preferred
when the following variables are considered:
• Mechanical stress,
vibration
• Switching frequency
• High coil current
• Speed control
• Size, space
• Clicking noise
In summary, relay control is still the simplest method of
controlling brushed DC motors, but perhaps performs better
for certain applications with unidirectional operation, i.e.,
radiator fans, as well as for those with reversed operation,
such as power windows.
DC Motor Control in H-bridge
Typically, half-bridge drivers are employed for brushed
DC motor control, so it is important to utilize the right
combination of microcontroller and driver. In reversed DC
motor applications, for example, the DC motor is typically in
H-bridge configuration with four power MOSFETs forming the
bridge. The ATA6836, a fully protected hex half-bridge driver
designed in the Atmel Smart Power SOI technology, can be
used by a microcontroller to control up to six different loads.
Up to a current limit of about 650mA, the Atmel®
ATA6836 can be used to drive up to 5DC motors directly
in H-bridge configuration. This applies, for example, to
flaps in air conditioning systems and side mirrors. In the
case of DC motors with higher wattage (about 10W to
800W), Atmel recommends using an integrated gate
driver (Atmel ATA6823 or Atmel ATA6824), an Atmel
AVR® microcontroller (e.g., Atmel ATmega32M1), and four
discrete N-channel power MOSFET to be selected according
to the DC motor’s wattage.
The H-bridge driver ICs currently available are often simple
predrivers that activate and deactivate the gates of discrete
power MOSFETs. The approach taken by Atmel, however,
is more complex. Based on its extensive experience with
stand-alone watchdog ICs and system basis chips – including
LIN transceivers, low drop voltage regulators, and window
VBAT
Voltage
Regulator
Atmel
ATmega88
or
Atmel
ATtiny45
Watchdog
Timer
LIN
Transceiver
2 High-side
Drivers
Atmel ATA6823
M
2 Low-side
Drivers
LIN
Figure 1. Atmel ATA6823 Block Diagram
Automotive Compilation Vol. 7
30
VBAT
Battery
VINT 5V
Regulator
VCC
Regulator
Bandgap
VBG
12v
Regulator
OTP 12bit
H2
H1
HS1
Driver
EN1
Logic
Control
DIR
LS1
Driver
PWM
S1
PWM
mode
L1
L2
WD
timer
CC
timer
VBAT
LIN
OV
UV
OT
LS2
Driver
Supervisor
GND
DG2
DG3
DG1
CC
RWD
EN2
LIN
VCC
Figure 2
31
CPLO
HS2
Driver
WD
TX
When designing brushed DC motor
control systems, high-temperature
is a second consideration. Taking
advantage of Atmel SOI technology’s
high-temperature capability, the
company has designed the Atmel
ATA6824. Specifically for the high
demands of engine compartment
applications where electronic control
units are specified for ambient
temperatures of 150°C or higher.
However, a system basis predriver
with an integrated 100mA, 3.3/5V
linear regulator (designed for such an
environment) needs to be qualified
for a junction temperature of up to
200°C.
CP
VRES
/RESET
• Low leakage currents
• High-temperature and highvoltage capability
• Excellent radiation hardness
• Improved latch-up immunity
• High switching frequency
High-Temperature
Applications
Charge
Pump
S2
Oscillator
RX
In summary, smart H-bridge drivers
from Atmel offer a more robust
and flexible approach to controlling
multiple brushed DC motors.
CPHI
VG
VINT
PBAT
VBAT
VCC
VMODE
Micro
Controller
watchdogs in different partitioning –
Atmel has combined these IPs with
push-pull drivers. The drivers are
designed using a very robust SOI
technology (Atmel® SMART-I.S.™).
The numerous advantages of this
technology have been described in
great detail in several previous issues
of Automotive Compilation and there
is no need to detail them here. They
include:
VBATSW
CP
PGND
1. Operating Current
2. Free wheeling current
LIN
solutions. With such as shift, the
user expects that manufacturers
guarantee full protection. Discrete
power MOSFETs, for example, need
to be protected against overcurrent
conditions. This is typically done by
monitoring the drain source voltage
that is fed to a comparator integrated
in the predriver. A high short-circuit
current will flow if a high-side and
a low-side power MOSFET are
activated simultaneously within the
same branch. As a countermeasure,
Atmel system basis gate drivers
feature implemented shoot-through
protection. The dead time can be
adjusted individually by choosing an
R/C combination at the CC pin of the
cross conduction timer. This allows the
engineer to flexibly adapt the dead
time to the switching characteristic of
the power MOSFETs used.
Protection
Smart 2-pin Motion
Control
Protection is also an important
consideration, particularly when
customers are hesitant to adopt a
new technology, as with migrating
from relays to semiconductor
In choosing a motor driver, the user
is also looking for good speed and
direction control. Characteristically,
the architecture of SBCs involves the
integration of all necessary peripheral
functions into the driver IC. In this
specific case, speed and direction
control are made extremely easy.
The microcontroller needs only two
command lines to set the speed and
direction of the DC motor: pins DIR
(cw or ccw operation) and pin PWM.
The moment the PWM signal is low,
the system basis predriver activates
both high-side drivers so that the
free-wheeling current can flow
without any additional microcontroller
command. The Atmel ATA6823/
ATA6824’s extensive control logic
supports the microcontroller by taking
over several tasks.
Shift to Brushless Motors
As stated above, BLDC motors are
only now emerging in automotive
applications, although they have
been popular in disk drives, industrial
applications and hobby electronics for
several years. Automotive industry
studies reveal that about 80% of DC
motor applications is still equipped
with brushed DC motors. Market
analysis conclusively shows, however,
that brushless DC motor applications
are growing at the fastest rate. This
© 2010 / www.atmel.com
VBAT
Voltage
Regulator
Atmel
ATmega32M1
or
Atmel
ATtinyx61
Watchdog
Timer
LIN
Transceiver
3 High-side
Drivers
M
Atmel
ATA6833/34
3 Low-side
Drivers
LIN
Figure 3. Atmel ATA6833/34 Block Diagram
means that BLDC motors will soon
take the lion’s share of new motor
control electronics R&D.
The advantages of BLDC motors over
brushed motors are obvious:
• Improved speed vs. torque
characteristics
• High dynamic response
• High efficiency
• Noiseless and interference-free
operation
• Extended speed ranges
• Long operation life
Maintenance-free operation is a very
important advantage for all systems
that operate continuously while the
engine is running, such as fuel pumps
or variable vanes in turbo chargers.
Also, the smaller size and reduced
weight are plus factors for BLDC
motors.
On the other hand, the increased
effort and cost of electronic control
(including both hardware and
software) could slow the replacement
of proven DC motors with BLDC
technology. Customer resistance to
Automotive Compilation Vol. 7
BLDC can be overcome, however,
if the motor control ECU cost is
effectively managed by using a
BLDC motor control system approach
comprising a microcontroller, a
system basis gate driver, and the
necessary software.
The B6 Predrivers
Currently, vehicle applications mainly
incorporate highly efficient 3-phase
brushless DC motors. Such motors
typically need a B6 bridge to control
three high-side and three lowside power MOSFETs. As with the
system basis H-bridge predrivers
Atmel® ATA6823/24, the B6 bridge
predrivers Atmel ATA6833/34
include all the elements needed to
form a complete system. The system
consists of a pin-programmable linear
voltage regulator (100mA, 3.3/5V);
a LIN transceiver; and a window
watchdog, in combination with six
push-pull stages. The stages are
needed to control the six discrete
N channel power MOSFETs which
operate 3-phase brushless DC
motors.
These predrivers also offer
outstanding space saving on the PC
board, helping the designer minimize
board size. And because the system
basis predrivers are assembled in
QFN packages with exposed pad, the
board design can easily be optimized
for perfect heat transfer. The QFN48
7x7 mm package features a thermal
resistance of Rthjc = 5K/W, and thus
a thermal resistance of Rthja = 20K/W
can be achieved with an elaborate
board layout.
Inputs/Outputs for all
Kind of Commutations
Flexibility is also a must for motion
control of power MOSFETs in 3-phase
brushless DC motors. In a B6predriver, it makes no sense to use
a 2-pin motion control (as with the
Atmel ATA6823 or Atmel ATA6824)
because flexibility in the control of
the power MOSFETs is mandatory
for different kinds of commutation.
Therefore, power MOSFETs should
be controlled from the μC separately
via the three high-side and three lowside inputs of the Atmel predrivers
ATA6833/34.
32
incorporate a broad range of
functionalities, some functions should
be intentionally assigned to the
microcontroller.
U Nominal
t
Figure 4. Crank pulse = 12V; drop: -7V
Operation During Crank
Pulses
In order to enable operation of BLDC
motor systems during the crank
pulse (as defined by ISO7637, see
Figure 4), the minimum supply
voltage must be as low as 5V and the
predriver must be able to activate
the high-side and low-side N-channel
power MOSFETs. Hence the charge
pump needs to be powerful enough
to operate both the high-side and
the low-side FETs via the internal
voltage regulator. Because of this,
the Atmel® ATA6833/34 devices are
ideal for systems which need to be
in operation during engine start, e.g.,
fuel pumps.
B6 Driver Versions
As with as the H-bridge predrivers
ATA6823/24, which are both
available for the standard and the
extended maximum temperature
range, there are also two hightemperature B6 bridge driver types
available for 3-phase BLDC motor
control.
The ATA6833 is rated for a maximum
junction temperature of 150°C. For
all convenience applications, and also
some powertrain applications, this
temperature is sufficient.
33
The ATA6834 targets hightemperature applications with an
ambient temperature of 150°C or
more. The device is designed and
qualified for a continuous maximum
junction temperature of 200°C. Power
dissipation calculations can be found
in the application note “Estimated
junction temperature rise due to
power dissipation during operation”
(see http://www.atmel.com/dyn/
resources/prod_documents/
doc9181.pdf)
With temperature warning
functionality and switch-off
thresholds adapted to high junction
temperature, and also with a special
bond pad coating, the ATA6834 is
perfectly suited for ECUs attached to
coolant pumps, turbo chargers with
variable geometry, or exhaust gas
recirculation systems (EGR).
Universal Use
Because BLDC motor applications
involve multiple types of signal
conditioning, universal use of system
basis gate drivers is recommended.
These drivers do not handle Hall
sensors and BEMF signals, for
example, but can be used universally
to make stock-keeping easier. And
although system basis devices
In case of motor current measurement
to detect overcurrent, the
designer should feed the voltage
drop via a shunt resistor to the
analog comparators of one of the
microcontrollers (e.g., the Atmel
ATmega32M1). These comparators
can be used to condition either the
Hall sensor signals of a sensor-type
motor or the BEMF signals of a
sensorless motor.
New Generation:
Atmel ATA6843,
Atmel ATA6844
To enable new, additional BLDC motor
applications that take advantage
of extended functionalities, a next
generation of advanced system basis
B6 predrivers has been developed.
Like their predecessors, they consist
of six push-pull stages combined with
a 100mA, 3.3/5V pin-programmable
linear voltage regulator; a window
watchdog with a separate time
base that is independent of the
microcontroller; and a LIN transceiver.
Since this LIN transceiver is based on
the stand-alone LIN transceiver IP,
Atmel ATA6663, the system basis
gate driver’s LIN section meets the
high ESD protection requirements
at the 8kV LIN pins and complies
with all relevant conformance testing
requirements.
The increased functionalities of the
next-generation devices Atmel
ATA6843/44 include:
• Expanded overvoltage detection
threshold (up to 30V). This
is an important feature for
all applications requiring full
functionality during jump-start
© 2010 / www.atmel.com
can therefore be equipped with BLDC
motors:
Atmel ATmega32M1
PSC
PSCIN0
AMP1+;AMP1-
PSCOUT0A
PSCOUT0B
PSCOUT0C
PSCOUT1A
PSCOUT1B
PSCOUT1C
Power Bridge
+
Shunt Resistor
• Electronic throttle control
• Exhaust gas recirculation
• Turbo charger with variable
geometry
• Dual clutch
• Automated manual transmission
• Fuel pump
• Coolant pump
• Radiator fan
• Variable manifold
• Synchronous rectifier
• Electric power steering
PH_A
PH_B
Motor
PH_C
Over Current
Current
HallA
HallB
HallC
ACMP0
ACMP1
ACMP2
PSC : Power Stage Controller
ACMPi : Analog Comparator Positive Input (i = 0,1,2)
AMPi+/- : Analog Differential Amplified Channel Positive/Negative Inputs (i = 0,1,2)
Figure 5.
conditions, such as fuel pumps. In
this case, the supply voltage is in
the range of 5V to 30V.
• Adjustable and very low shortcircuit-detection threshold for
increased compatibility with
low-impedance power MOSFETs.
The drain source monitoring
can be adjusted by feeding a
voltage in the range of 0.5V to
3.3V to pin SCREF. An internal
voltage divider sets the detection
threshold to 2.5V if the pin is
left open. Note that the devices
Atmel® ATA6833/34 do not
provide this pin.
Unlike the standard-temperature
version Atmel ATA6843, the warning
threshold of the ATA6844 is set to
150°C, and its excess temperature
switch-off threshold is set to 200°C.
This makes this IC able to cope with
the environment of electronic devices
attached to parts of the engine, such
as coolant pumps, EGR, or turbo
chargers. Using NiAu plating on the
Aluminum pads, the Atmel hightemperature ICs are able to withstand
the challenges of high ambient
temperatures over a product’s
complete life cycle. The plating avoids
dangerous gold-aluminum corrosion
(“purple plaque”).
providing freedom to control discrete
power MOSFETs, e.g., for sinusoidal
commutation. The new predrivers also
allow simple and cost-effective control
of MOSFETs via the microcontroller’s
three command lines: the gate driver
ICs’ high-side and low-side inputs are
designed with opposite input logic
(ILx and /IHx).
High-temperature ICs for
Hot Applications
These automotive applications are
located within hot environments and
VBAT
The new predrivers include 6-pin
control (as with the ATA6833/34),
Automotive Compilation Vol. 7
VMODE
VBAT
VCC
DG1
Atmel
ATmega32M1
or
Atmel
ATtiny157
DG2
DG3
COAST
3.3/5V VCC
Regulator
Supervisor:
short circuit
openload
over temperature
under voltage
VINT VG
13V
Regulator
CP
13V
Regulator
VBG
Logic Control
High Side
Driver 2
Osc.
Low Side
Driver 1
Clear
Hall A
Hall B
Hall C
High Side
Driver 1
Low Side
Driver 1
IL1-3
RX
PBAT
High Side
Driver 3
Atmel
ATA6843/44
/RESET
WD
IH1-3
CPHI CPLO VRES
WD
timer
LIN
CC
timer
Low Side
Driver 3
TX
LIN
ENx
RWD
CC
SCREF
GND
H3
H2
H1
S1
S2
S3
L1
L2
L3
M
Hall A
Hall B
Hall C
• A digital input at pin COAST
connected to the logic control.
If this input is activated, all
power MOSFETs are switched
off, allowing the motor to coast.
In some situations, the motor
is asked to coast until it stops.
Also, the coast function may be
used in the case of overvoltage
(e.g., load dump) or to reduce
speed before reversing the BLDC
motor. Note that this pin is not
available in ATA6833/34.
PGND
Figure 6. Atmel AT6843/44 Block Diagram
34
Table 1 . System Basis B6 Predrivers Overview
Tj
Operating Range
Drain Source Monitoring
Coast Function
3-pin Control
ATA6833
150°C
5-20V
4V
No
No
ATA6834
200°C
5-20V
4V
No
No
ATA6843
150°C
5-30V
0.5-3.3V
Yes
Yes
ATA6844
200°C
5-30V
0.5-3.3V
Yes
Yes
Atmel AVR
Microcontollers
intelligence and control, which can
be optimized by the use of small,
powerful microcontrollers.
To support the growing demand
for BLDC motors, Atmel® supplies
not only systembasis gate drivers,
but microcontrollers with software
support as well.
Taking advantage of its unsurpassed
experience in embedded Flash
memory microcontrollers, with a
large number of devices of Atmel
AVR® devices from 8- to 32- bit
microcontrollers. Atmel brings
innovative solutions, whether for
sensor or actuator control or more
sophisticated networking applications.
These microcontrollers are fullyengineered to fulfill OEMs’ quality
The automotive market for electronics
is growing rapidly as the demand
for comfort, safety and reduced
fuel consumption increases. All of
these new functions require local
requirements towards zero defects.
Several AVR microcontrollers are
qualified for operation up to + 150˚C
ambient temperature (AEC-Q100
Grade0).
Designers can distribute intelligence
and control functions directly into
or near gearboxes, transfer cases,
engine sensors actuators, turbo
chargers and exhaust systems.
Links
35
• Overview of Atmel Automotive
Microcontrollers http://www.atmel.
com/products/automcu/default.
asp?source=overview_automotive
• System basis B6 predrivers:
Atmel ATA6833 Data Sheet:
http://www.atmel.com/dyn/resources/
prod_documents/doc9122.pdf
• Application note, “AVR194,”
featuring BLDC motor basics, hardware
implementation, and code example.
http://atmel.com/dyn/resources/prod_
documents/doc8138.pdf
• Atmel ATA6834 Data Sheet:
http://www.atmel.com/dyn/resources/
prod_documents/doc9122.pdf
• Application note: http://www.atmel.
com/dyn/resources/prod_documents/
doc9143.pdf
© 2010 / www.atmel.com
EMC –
Synonym for
Exasperating,
Magic,
Confusing?
Juergen Strohal
The acronym EMC stands for “electromagnetic
compatibility” and means the ability of an electronic device
(or a module, printed circuit board or integrated circuit)
to operate in an electromagnetically distorted environment
while keeping its own distortions below certain thresholds so
that other devices do not suffer any serious adverse effects.
For many people this field of expertise seems more like a
form of black magic: No matter what work is done related to
EMC, not only will something completely unexpected and
unpredictable happen, worse than that it can be assumed
that things will always take a turn in the wrong direction.
It will become apparent through this article whether this
viewpoint is accurate and what engineers can do to gain
more facility in this field.
Those involved in the field of electronics, especially in the
automotive sector, will certainly have been confronted by
EMC-related issues more than once. The phenomenon of
radio interference is nearly as old as the invention of radio
itself and at an early stage led to the definition of guidelines
for noise suppression. The other part of EMC, the immunity
against distortions, only began attracting attention around
fifty years ago. While it is merely a nuisance to experience
radio interference, it is definitely a serious matter if an ABS
or airbag may also be affected by interference, e.g., when
passing a TV tower. Not only is the number of electronic
control units in cars on the rise, so too is the number of
electronic devices frequently used inside the cars such as
cellphones, portable navigation devices, wireless headsets
which may also cause interference. Making matters even
worse is that more and more of devices of this kind operating
at higher and higher frequencies are constantly being
introduced to the market. Higher frequencies imply that
Automotive Compilation Vol. 7
smaller structures can behave like an antenna and crosscoupling needs to be considered even for relatively small
coupling capacitances. It is therefore only natural that there
has been a growing need to define certain rules of the game
over the past decades.
Today all car manufacturers are aware that EMC testing
is an important part of car electronics development and
understand that EMC issues become costlier the later they
are discovered. That is the reason why they do not just
rely on a final test inside the car but insist on tests of the
electronic control unit (ECU) and even on test results of the
integrated circuits used in the design before deployment in
vehicles. All around the world a wide variety of test methods
have been developed for both unwanted electromagnetic
emissions as well as the susceptibility for electromagnetic
distortions. In the meantime, all integration levels are covered
and over the past 10 years the various standardization
committees have devoted their time to the IC level. As a
semiconductor manufacturer, Atmel is confronted primarily
with IC-level and ECU-level tests. Unfortunately, not only
have there been quite a large number of different standards
established (perhaps a bane to testing specialists), at the
same time, many OEMs apply these standards in slightly
different ways.
Two different types of measurements can be distinguished in
the case of emission as well as susceptibility tests:
• The radiated measurements, involving an antenna, a
coupling clamp, a magnetic or electric probe, a stripline
or a TEM cell
36
• Measurements carried out using galvanic coupling to
certain ports to measure or inject RF signals
Semiconductor companies have do deal mostly with
testing at the IC level, however certain applications such
as automotive networking systems also require the proof
that some module level tests are passed by those ICs that
include integrated bus line transceivers. The “classic”
EMC tests at the IC level measure the emissions in varying
frequency bands at defined frequency steps, dwell times,
measurement bandwidths and detector types as well
as measuring immunity by applying an unmodulated
or AM-modulated RF signal of defined amplitude, again
while varying the frequency at defined steps. These tests
are specified in the international standards IEC 61967 for
emission and IEC 62132 for immunity. Currently these
standards are supplemented by new test standards for pulse
measurements.
Most ports at the IC level are designed to be connected
internally on the PCB only while just a few ports, such
as supply pins, bus lines or antenna pins, are connected
externally. While EMC requirements are less stringent for
local (internal), the global (external) ports are far more
critical because the cable lengths involved increase the
cross-coupling between different lines or may behave as an
undesired antenna for RF signals. Certainly a few ports such
as those for bus lines are external ports by definition, but for
most ports it is the application that determines whether they
need to be treated as local or global ports.
The good news is that designing circuits and board layouts
which are robust will not only ensure an assembly works
better and is more dependable but in most cases also
help to achieve the required performance regarding both
electromagnetic emissions and immunity. Having said this,
how can circuit design be achieved which is that robust? Of
course there are a few general rules which help to improve
the EMC behavior of the circuit:
• Careful consideration should be given to what clock
frequency is really needed for the development
application. The lowest clock frequency possible should
be chosen because this is the first measure which will
reduce electromagnetic emissions.
• High-impedant ports are susceptible to RF distortions;
therefore, impedance should be kept as low as
acceptable or a low-impedance path to GND for the
RF disturbance should be provided. If an integrated
37
circuit indicates that some GND pins are related to
certain VCC pins or ports, where decoupling caps are
placed should take this knowledge into account. Ports
that are connected on the outside of the ECU require
special attention – plan for decoupling capacitors to GND
and series resistors if possible – 10 to 100Ω are often
acceptable, whereas higher values will form a more
efficient filter but also cause a higher voltage drop for
DC signals. If emission of a particular port is the problem,
one end of the resistor is connected to the port while
the capacitor is on the other side. To protect a port
against RF distortions the components are arranged
inversely. For frequencies >10MHz ferrite beads may be
more efficient than only utilizing small resistors and as a
further benefit their DC resistance is negligible, meaning
the circuit will not suffer from a drop in voltage.
• For higher frequencies a capacitor functions not only as
a capacitor but also has some inherent, built-in parasitic
components such as series inductance and resistance –
known as equivalent series resistance (ESR) – to name
only the most important components with adverse
effects. Because the correct choice and placement of
decoupling capacitors is of vital importance, this will be
discussed in more detail below.
• In addition, resistors need to be regarded as a more
complex component (highly depending on the type
of construction and also on the resistance value).
Fortunately, for a typical low-ohmic thin film resistor as
they are used for building EMC filters, the contribution of
its parasitic components is largely negligible up to 1GHz.
• When developing the PCB layout, the different circuit
blocks should be arranged in such way that sufficient
space around sensitive inputs is provided towards
switched signals of high amplitude and/or frequency
because of the possible interferences these signals may
cause. Having parallel tracks on a board provides good
coupling between the signals on these tracks – if this
kind of coupling is not desired, insert some GND area
between the tracks; should these tracks cross each
other at different layers, have the tracks cross at right
angles to minimize the coupling area. Keep tracks as
short as possible, especially those carrying RF or
switched signals with fast slopes. Critical parts of the
circuit such as tuners may require shielding. The highest
frequency the circuit produces or is exposed to should
be considered and the track length of critical
connections kept below 1/10 of the wavelength. Two
considerations must be kept in mind here: First, the
© 2010 / www.atmel.com
wavelength λ on the PCB is shortened due to εr of the
board material, for FR4 this is typically around 4.5;
however the effective εr will be somewhat lower
because part of the electric field of a micro strip line is in
free space. For a frequency of 3GHz the formula
Capacitor
ESR
Parasitic Inductance
Cp
Rp
reveals that a track length of about 50mm already
equals λ/10.
Secondly, the highest frequency in the circuit is
Capacitor
ESR – soParasitic
Inductance
determined by the
fastest slopes
if some
parts of
the design operate at 1MHz but with slopes of 1ns,
there will be frequencies of at least 500MHz on the
Cp
PCB.
• Differential signals must be routed close to each
other with the same track length for both lines. Avoid
generating large loops and keep theRppath for the return
current in mind. The larger the area of a loop, the higher
the susceptibility and the lower the frequencies which
may impact the circuit. Analogously, this is valid for
emission, too – any tracks forming a loop with an RF
current flow can behave like a loop antenna.
• The ground plane should be designed as solidly as
possible, preferably using a multilayer PCB with
dedicated layers for GND and power planes. Typically,
the signal layers will be on the top and bottom side of
the PCB and the GND/power planes on the inner layers.
It is advantageous to keep the distance between signal
layer and adjacent GND/power plane to a minimum.
Doing so helps achieve relatively low track impedance
even for fairly thin connections. Slots in the GND plane
should be avoided to prevent creating unwanted slot
antennas. In addition, small “islands” should be avoided,
different GND areas need to be connected using a
sufficient number of vias (one via every 3 to 5mm is
sufficient for most designs).
• Hopping between the layers should be kept to a
minimum during board development. Every via,
especially “long” ones from top to bottom layer, involve
some inductance; as a rule of thumb this is in the range
of 0.5 to 1nH. Particular care needs to be taken about
GND connections of decoupling capacitors. Atmel® highly
recommends placing several vias in parallel close to the
respective capacitor.
Automotive Compilation Vol. 7
Figure 1. Equivalent Circuit of a Capacitor
Resistor
Parasitic Inductance
Cp Shunt Capacitance
Figure 2. Equivalent Circuit of a Resistor
Equivalent Circuit Model of the Capacitor
In the capacitor’s equivalent circuit model, the simplest model
comprises just a serial connection of the nominal capacitor, an
equivalent series resistance and a parasitic series inductance.
The ESR determines the lowest impedance reached at the
capacitor’s series resonance. Above this series resonance
the capacitor’s impedance will increase with frequency,
thus behaving like an inductor. A more sophisticated model
would also include the components Cp and Rp, connected in
gray in Figure 1. Modified equivalent circuits are also found
in literature which show Cp and Rp in parallel to the whole
serial connection of (desired) capacitor, ESR and parasitic
inductance; it is merely a question of transforming the
values of the respective inherent components. The parasitic
inductance together with Cp leads to a parallel resonance that
is frequently neglected, because such parallel resonance of
typical SMD ceramic capacitors will only appear at several
GHz.
The series resonance of the capacitor is determined by its
type (electrolytic, foil, ceramic), mechanical dimensions
(axial, radial, SMD, size) and of course its value. The higher
the capacitance of a certain capacitor type, the lower the
series resonance frequency. Therefore, it is advisable not
just to place a single capacitor for decoupling purpose,
but combine two or several caps to achieve broadband
decoupling. For example, it is often recommended to pair a
38
Figure 3. Attenuation of two Ceramic Capacitors of 10nF and 100pF in
Parallel in a 50Ω System
10nF capacitor for lower frequencies with a 100pF cap for
higher frequencies. The following will explore whether this is
advisable. A very basic linear RF simulation tool is sufficient for
demonstrating this; there are even freeware tools available
for this purpose. Many manufacturers of ceramic capacitors
supply S-Parameter files for their products and it is advisable
to use them. Figure 3 shows the attenuation of the above two
capacitors when placed in parallel from a 50Ω track to GND.
This looks quite acceptable. Attenuation of at least 30dB
was achieved for frequencies between 20MHz and well
above 1GHz. If a higher reference impedance than 50Ω
had been used, it would look even better. In a rather ideal
world, it would be possible to stop here. But has something
been overlooked? In reality, it is not possible to connect
the capacitors perfectly to GND or to the track or pad
which needs to be decoupled. Every track on the PCB
above behaves like a transmission line and its impedance
is determined primarily by track width, the thickness of the
PCB or, in case that a multilayer PCB is used, the distance
between signal and GND layer, the distance to adjacent GND
areas and the dielectric constant εr of the PCB material. Again,
there are special books and free calculation tools available for
guidance on this issue. With track widths of 0.2mm, GND area
>0.5mm away from the track and εr = 4.7, impedance of well
39
above 100Ω for 2-layer boards (1.6mm standard thickness)
will result and close to 50Ω will result for a multilayer board
with 150μm distance between signal layer and GND plane.
When considering the red curve in Figure 4, it is obvious it
looks quite different from the previous graph. Figure 4 shows
how decoupling performance changes if the board layout is
not done with care. The assumptions for the red curve were
as follows: standard 2-layer PCB, distance between caps and
to their GND vias: 10mm with just one GND via per cap. Now,
quite unexpectedly, there is a highly undesirable resonance
around 130MHz with attenuation of only 6dB. The green
graph in Figure 4 shows the performance for an improved
board layout. Now a multilayer board is used, the two caps
are closer to each other and each one has two GND vias only
1mm away from the respective cap. The resulting decoupling
performance is significantly improved, but there still seems to
be room for improvement.
The lesson learned from this example is, first, the decoupling
caps need to be as close as possible to each other and to the
component which needs to be decoupled. Secondly, using a
multilayer PCB with a GND plane just below the signal layer
is beneficial too. And, finally, it appears to be a good idea to
do some simulation with “real” capacitors rather than just
© 2010 / www.atmel.com
Red: Distance between caps and their
GND vias: 10mm, one GND via per cap,
track width: 0.2mm, board thickness
top to GND: 1.6mm.
Green: Optimized, distance between
caps: 5mm, between caps and their
GND vias: 1mm, two GND vias per cap,
track width: 0.2mm, board thickness
top to inner GND plane: 0.15mm
Figure 4. Attenuation of two Ceramic Capacitors of 10nF and 100pF in Parallel in a 50Ω System with Realistic Parasitic
Components in Connecting Tracks
selecting them based on instinct. Innovative layout designs
even place only a single centralized group of capacitors to
decouple a larger area – but that is something which should
not be attempted without careful simulation.
As mentioned previously in this article, car manufacturers
are aware that EMC issues generally become costlier the
later they are discovered. Engineers may benefit from this
insight within their own development work. Giving some
thought to EMC behavior already when designing a circuit
definitely helps avoid unpleasant surprises during EMC
approval testing. Having said that much – what needs to be
done if a design fails EMC testing despite the care exercised
prior to testing? Or, just in case it was not possible to include
sufficient time, budget or experience appropriate for EMC
assessment in a project, what can be done to improve
matters?
The truth is that no standard procedure exists. If emission
is the problem, a probe across the circuit can be attempted
with a field probe to detect any potential “hot spots.” Or,
if fast enough, it is possible to re-perform the particular
failed emission measurement while connecting a short
isolated wire to some “suspicious” spots on the PCB. If a
critical one shows up, the number of spurs will increase;
Automotive Compilation Vol. 7
this becomes immediately noticeable on the connected
receiving instrument. If the design performs weakly in terms
of susceptibility, consideration must be given to what parts of
the circuit are affected (this can often be deduced from the
malfunction occurring during the immunity measurement),
and the coupling path must be located. Once the critical
parts of the circuit have been pinpointed, the techniques
described above can be used to improve EMC performance.
A key consideration in this regard is that effective decoupling
requires a solid GND area. If this is lacking, it may be easier to
redesign the board first; alternatively some copper foil could
be added to facilitate further optimization measures in the
lab.
Hopefully it has become apparent that there is nothing
magical at all about EMC and that it is simply applied physics.
Naturally, our knowledge about coupling mechanisms
and particularly their parameters tends to be inaccurate
and sometimes incomplete, even if highly sophisticated
electromagnetic simulation tools are used. So there is a trace
of magic (or uncertainty) left in the process after all. But
these imponderables are also what challenge us daily in this
specialized discipline.
40
EMC Pulse Immunity
System-level Tests
Stephan Gerlach
System-level tests for EMC pulse immunity have been
established in order to test the immunity of an electronic
device or module against strong electromagnetic fields (e.g.,
the near field of an AM or FM transmitter station or the short
but intense shock from a flash that can damage or at least
disable vehicle electronics). Many car manufacturers and
Tier1 suppliers have tried to simplify test procedures and to
standardize both the test set-up as well as workbenches. By
using mature but still valid test cases they aim to reduce the
use of wiring harness, interacting modules and the car’s body
to only the basic functional minimum. Unfortunately, this led
to a large number of experimental set-ups that were similar
but incompatible for comparing technical parameters. Two
examples developed by car OEMs will be explained in this
article.
Figure 2 shows an example that is comparable to the set-up
of Figure 1 regarding functionality, but leads to differing
results.
Connector
Pin
Connector
+
Wire
Communitcation
Bus or Remot I/O Harness
BATTERY
Default
Connection
for Bleed-Off
Resistor
DUT
Test
Fixture
Insulator
Insulator
Table with Ground Plane
ESD
Simulator
-
Bleed Off
Resistor
ESO
SImulator GND
Chamber of Facility Floor
Figure 1. Principle of Car Wiring Harness Pulse Immunity Test Using an ESD Simulator (“ESD Pulse Gun”)
41
© 2010 / www.atmel.com
EST
GR
OU
ND
50mm
Battery
AN
PL
50mm
E
Electrostatic Discharge Generator
Actuators
Power Supply
Sensors
Figure 2. Workbench of a Major French Car Manufacturer
1
2
8
4
7
6
+
-
9
10
100mm >=200 mm
80mm
3
5
10mm
1500mm
>=100mm
11
Figure 3. EMC Pulse Immunity System-level Test According to ISO 10605 Annex F
(1 = metal ground plane, 2 = ESD resistors, 3 = reference ground, 4 = optional ground line, 5 = DUT1 (master), 6 = wiring harness, 7 = car battery,
8 = DUT2 (slave), 9 = artificial mains network, 10 = battery ground, 11 = ESD pulse generator with gun and ground cable)
Automotive Compilation Vol. 7
42
To overcome this obstacle, a major German
car manufacturer started an initiative that was
accepted by all major car OEMs. The proposed
test set-up simulates a wiring harness that is
exposed to ESD events. Since 2007 this setup has been part of the international standard
ISO 10605 as Annex F.
Functionality of EMC Pulse
Immunity System-level
Testing
By using an ESD gun, different pulses with
positive and negative polarity in the range of
1 to 30kV are applied to three test pads. The
so-called conducted discharge is utilized to
guarantee the highest possible repeatability
which is a vitally important characteristic of
any test procedure. Nevertheless, it cannot
be ruled out that a single pulse delivers the
same reaction on the device under test. The
standard procedure therefore prescribes a
repetition rate of 10 ESD pulses for each
polarity. To guarantee 100% test reliability,
this procedure has to be repeated on the test
fixture for all three pads.
Figure 4.
Stimulated Transient Signal Measured with Current Probe (Clamp-on Ammeter)
Figure 5.
Workbench System-level EMC Pulse Immunity Test in Application Lab
The reason for this is quite simple: To a
certain extent, the shape and amplitude of the
stimulated waveform within the wiring harness
is arbitrary. Moreover, because the ESD
pulses are applied to a “living system” (i.e.,
ongoing LIN communication between master
and slave) they have a different impact on the
DUT’s failure behavior until final destruction.
Figure 4 shows that current spikes of up to
37A are created with a burst frequency of
several hundred MHz. As explained above,
neither the pulse shapes nor the effects are
identical. A DUT can withstand five or seven
pulses, but the 8th pulse will cause final
destruction.
Figure 6.
Workbench System-level EMC Pulse Immunity Test – Pulse Measurement
43
© 2010 / www.atmel.com
Atmel Corporation
Atmel Asia Limited
Atmel Munich GmbH
Atmel Japan
2325 Orchard Parkway
Unit 01-5 & 16, 19F
Business Campus
9F, Tonetsu Shinkawa Bldg.
San Jose, CA 95131
BEA Tower, Millennium City 5
Parkring 4
1-24-8 Shinkawa
USA
418 Kwun Tong Road
D-85748 Garching b. Munich
Chuo-ku, Tokyo 104-0033
Tel: (+1)(408) 441-0311
Kwun Tong, Kowloon
GERMANY
JAPAN
Fax: (+1)(408) 487-2600
HONG KONG
Tel: (+49) 89-31970-0
Tel: (+81)(3) 3523-3551
www.atmel.com
Tel: (+852) 2245-6100
Fax: (+49) 89-3194621
Fax: (+81)(3) 3523-7581
Fax: (+852) 2722-1369
© 2010 Atmel Corporation. All Rights Reserved.
Atmel®, Atmel logo and combinations thereof, AVR®, QTouch®, picoPower®, SMART-I.S.™ and others are registered trademarks, or trademarks of Atmel Corporation or
its subsidiaries. Other terms and product names may be trademarks of others.
Disclaimer: The information in this document is provided in connection with Atmel products. No license, express or implied, by estoppel or otherwise, to any intellectual property right is granted by this document or in connection
with the sale of Atmel products. EXCEPT AS SET FORTH IN THE ATMEL TERMS AND CONDITIONS OF SALES LOCATED ON THE ATMEL WEBSITE, ATMEL ASSUMES NO LIABILITY WHATSOEVER AND DISCLAIMS ANY EXPRESS,
IMPLIED OR STATUTORY WARRANTY RELATING TO ITS PRODUCTS INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTY OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT.
IN NO EVENT SHALL ATMEL BE LIABLE FOR ANY DIRECT, INDIRECT, CONSEQUENTIAL, PUNITIVE, SPECIAL OR INCIDENTAL DAMAGES (INCLUDING, WITHOUT LIMITATION, DAMAGES FOR LOSS AND PROFITS, BUSINESS
INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT OF THE USE OR INABILITY TO USE THIS DOCUMENT, EVEN IF ATMEL HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Atmel makes no representations
or warranties with respect to the accuracy or completeness of the contents of this document and reserves the right to make changes to specifications and products descriptions at any time without notice. Atmel does not make any
commitment to update the information contained herein. Unless specifically provided otherwise, Atmel products are not suitable for, and shall not be used in, automotive applications. Atmel products are not intended, authorized, or
warranted for use as components in applications intended to support or sustain life.