Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
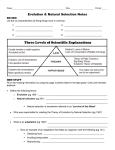
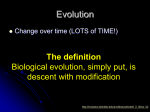
Gene Networks Have a Predictive Long-Term Fitness Michael E. Palmer Department of Biology Stanford University Stanford, CA 94305, USA +1-415-867-3653 [email protected] ABSTRACT new experimental replicate, that genotype A will, on average, increase by factor wA, and genotype B will increase by factor wB, over one generation. In the field of evolutionary computation (EC), the one-generation is predictive by fiat: we can intentionally program the simulation such that the genotypes will increase in number by their fitness factors, on average over one generation. But what about the predictability of evolutionary success over the long-term? In EC, we do not explicitly program the long-term dynamics: they are implicitly produced by the many interacting parts of our model. This is comparable to the situation in biology, where the short-term rules of population genetics are well understood, but long-term evolution is often considered to be unpredictable, nondeterministic, and even creative, like a “blind watchmaker” [2]. Using a model of evolved gene regulatory networks, we illustrate several quantitative metrics relating to the long-term evolution of lineages. The k-generation fitness and k-generation survivability measure the evolutionary success of lineages. An entropy measure is used to quantify the predictability of lineage evolution. The metrics are readily applied to any system in which lineage membership can be periodically counted, and provide a quantitative characterization of the genetic landscape, genotype-phenotype map, and fitness landscape. Evolution is shown to be surprisingly predictable in gene networks: only a small number of the possible outcomes are ever observed in multiple replicate experiments. We emphasize the view that the lineage (not the individual, or the genotype) is the evolving entity over the long term. Notably, the long-term fitness is distinct from the short-term fitness. Since evolution is repeatable over the long-term, this implies long-term selection on lineages is possible; the evolutionary process need not be “short-sighted”. If we wish to evolve very complex artifacts, it will be expedient to promote the long-term evolution of the genetic architecture by tailoring our models to emphasize long-term selection. Neither biologists, nor practitioners of EC, typically think of selection as acting directly on lineages, rather than on individuals or genotypes. However, in models in which longterm evolutionary outcomes are 1) predictable, and 2) not fully predicted by the short-term fitness, it is often appropriate to frame the evolutionary process as acting on lineages. Lineage evolution will in this case describe the long-term dynamics both simply and with sufficient accuracy. We might slightly increase our descriptive accuracy by including the voluminous details of organismal-level selection; but this would hide higher-level consistencies best captured concisely as lineage-level selection. Categories and Subject Descriptors I.2.2 [Artificial Intelligence]: Automatic programming. D.1.2 [Software Engineering]: Automatic programming. J.3. [Life and Medical Sciences]: Biology and genetics. In this article, we employ the “gene networks” model of Wagner [10] and Siegal and Bergman [8] to study the repeatability of long-term evolutionary outcomes. We illustrate use of several metrics of the long-term evolutionary success of lineages, including the k-generation fitness and the k-generation survivability. Using an entropy measure, we quantify the predictability of long-term evolution in gene networks. Previously, an computational model of lattice proteins has been shown to have a predictive long-term fitness [7]; here, we will show the same for the gene networks model. General Terms Measurement, Experimentation, Theory. Keywords gene networks, lineage selection, long-term evolution, survivability, predictability, repeatability, entropy, complexity. 1. INTRODUCTION 2. METHODS 2.1 Gene networks model As employed in biology, the standard one-generation fitness is useful because it is often predictive. For example, a microbiologist might estimate the fitnesses of two competing strains of bacteria, in multiple replicate experiments. These fitness estimates will enable the microbiologist to predict, in a In the gene networks model, the phenotype of an individual is an M-dimensional vector representing the expression rates of M gene products, as shown on the right side of Figure 1. In the variant of the model [5] used here, the elements of the phenotype vector range from 0 to 1 (representing no expression, to maximal expression). Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, or republish, to post on servers or to redistribute to lists, requires prior specific permission and/or a fee. GECCO’13, July 6–10, 2013, Amsterdam, The Netherlands. Copyright © 2013 ACM 978-1-4503-1963-8/13/07…$15.00. The heritable genotype is an M by M matrix, shown on the left of Figure 1. Element (i, j) of the matrix represents the regulatory action of gene product j upon the expression of gene product i, and may be negative (inhibiting expression), zero (no effect), or positive (promoting expression). 727 The parameter σ (set to 0.1 here) permits control of the severity of selection (lower σ makes relative selection stronger). Initially, a random fraction c of the matrix elements are set to values drawn from the standard normal distribution, and the rest are set to zero; this permits control of the amount of epistasis. This epistatic interaction among the genes makes the adaptive landscape of the model multimodal and complex. Mutations of the genotype matrix are effected by selecting a new value from the standard normal distribution for one of the nonzero matrix elements; zeroes never mutate. At each generation, we repeat the following operations in order: replication proportional to fitness; sampling to the carrying capacity N; mutation; migration (if there are multiple demes). 2.2 Measuring the fitness of lineages We define an asexual lineage as a founding individual organism and zero or more generations of its descendants. A lineage is therefore monophyletic. We assign each founder a unique tag number. This tag is inherited without error, permitting us to count the number of living descendants of a founder, or the “membership” of a lineage, at any time. (Here, all reproduction is asexual, but similar tracking of sexual lineages is possible if we restrict the founders of lineages to be all the members of a new species at the moment of speciation. With this restriction, sexual lineages, like asexual ones, may never fuse together [6].) Figure 1. During “development” the gene expression vector P is repeatedly multiplied by the regulatory matrix G, and then normalized. We conduct multiple replicate runs of a given experimental scenario. All replicates of a scenario are identical in their founding individuals, their initial and target vectors (uinit and utarg), and in their experimental parameters (e.g., the mutation rate µ, the parameters a, c, and σ). However, the replicates differ stochastically: a different random seed is used so that stochastic differences arise in 1) which mutations occur, 2) how the population is sampled down to the carrying capacity during reproduction, and 3) random migration (in those experiments below that include multiple demes). Thus the evolutionary outcomes in a set of replicates of a given scenario provide a statistical picture of what may be expected to occur in that scenario when the initial conditions and other parameters are fixed, but random mutation, sampling, and migration occur. At the beginning of the developmental process, each individual’s M-dimensional phenotype vector is set to a fixed . initial vector uinit (with M elements selected uniformly from the interval [0, 1]). As illustrated in Figure 1, each iteration of the developmental process consists of two parts: first, the genotype matrix and the current phenotype vector are multiplied together; and second, the entries of the resulting vector are normalized with the following sigmoid normalization function, which maps each element x of the matrix product back to the interval [0, 1]: The parameter a controls the steepness of the sigmoid function; here, we use an a value of 1. The vector of normalized elements becomes the phenotype vector for the next iteration of the developmental process. The standard one-generation fitness from population genetics measures the expected factor of increase in the count of a particular genotype over a time span of one generation. The fitness is useful because it is (often) predictive: if we measure the fitness in multiple replicates of a given scenario, we can (often) expect that a new replicate will yield a similar factor of increase in number for a given genotype. (The degree of predictability will depend on the scenario, as we discuss below.) If the individual’s phenotype converges to any vector in less than 100 developmental iterations (rather than entering a cycle, or not converging), then that individual is declared to be viable; otherwise, it “dies” and is removed from the population. Convergence is determined as follows. Let d be the distance metric between two phenotype vectors ua and ub defined by: Extending the standard one-generation fitness, Palmer and Feldman [6] previously defined a long-term fitness of lineages, as follows: π "# N ( t ) = n $% is defined as the probability that a lineage has n members at generation t. This can be estimated with a sufficient number of longitudinal experimental replicates in which lineage membership is periodically counted. At the end of each developmental iteration, an average phenotypic vector uavg over the last τ=10 iterations is computed. If the average d between the last τ phenotype vectors and uavg is below the threshold value ε=10-4, then convergence has occurred, and the individual is declared viable. N ( t ) is the expected number of members of the lineage at generation t, namely, An M-dimensional phenotypic “target vector”, utarg, the M elements of which are floating point numbers chosen uniformly from the interval [0, 1], defines the best possible phenotype. For all viable offspring, we compute the fitness, f, using the distance between the final, converged phenotype, uphen, and the target vector: N ( t ) = ∑ nπ "# N ( t ) = n $% . n Wk ( t ) is the “k-fitness” at generation t, namely, the ratio of the expected number of members of the lineage at generation t+k, to the expected number at generation t: Wk (t ) = 728 N (t + k ) , N (t ) (t ≥ 0, k ≥ 1) . Note that W1 ( t ) is equivalent to the standard one-generation fitness. We will refer to k=1 as the immediate term; k>1 as the short term; and k>>1 as the long term. Note that the standard (k=1) fitness can only depend on the standing variation in a lineage. However, different lineages have different tendencies to generate new variation over time. On time spans of k>1, the variation generated by a lineage begins to affect its k-fitness; for k>>1 this generated variation becomes increasingly important. H joint (k) estimates the average uncertainty in the outcome of a new experimental replicate at generation k. Note that 0 ≤ H joint (k) ≤ L (in units of bits). If H joint (k) = 0 , then the same state always occurs at generation , then k: the outcome is perfectly predictable. If the outcomes unpredictable. The term evolvability has come to mean the tendency to produce adaptive variation [12]. However, it has been shown [6, 7] that not only adaptive variation matters: the tendency of lineage to avoid deleterious variation, to disperse in space, and to diversify in phenotype can also matter (the latter two are sometimes described as “bet hedging”) to the long-term lineage fitness, and to its long-term survival. are equally likely, and thus maximally We also compute H i (k) , the entropy of the survival state of each distinct lineage i. (Below, we will show that these lineage entropies, H i (k) , are useful for interpreting the variation in the joint entropy, H joint (k) , over time.) The k-survivability of lineage i, Ski ( 0 ) , is the probability of its survival to generation k Palmer and Feldman [6] also defined the “k-generation survivability”, Sk ( t ) , which measures the probability that a (given that it was present at generation 0), so H i (k) turns out to : be a simple function of lineage will survive to generation t+k, given that it has living members at generation t: . Sk ( t ) = π ⎡⎣ N ( t + k ) ≠ 0∣N ( t ) ≠ 0 ⎤⎦ . Because a lineage has only two possible survival states, Selection on lineages is ultimately determined by extinction, because once a lineage proceeds to zero members, it cannot return. Thus Sk ( t ) is the more fundamental metric of lineage 0 ≤ H i (k) ≤ 1 (in units of bits). The joint entropy and the lineage entropies obey the following inequalities: success; however, in the shorter term, extinctions may be rare, so Wk ( t ) can be a useful proxy. H joint (k) ≥ max i "# H i ( k ) $% , and The question we address here is: how repeatable are evolutionary outcomes in gene networks over the long term? Does observing the outcome of multiple replicates give us power to predict the long-term outcome of a new replicate? H joint (k) ≤ ∑ H i ( k ) . i All of these metrics can be readily estimated in any situation in which we can: 1) periodically count the membership of each lineage, and 2) conduct a sufficient number of experimental replicates. They provide a quantitative description of the predictability of a particular experimental scenario, and predictions of the evolutionary success of each lineage. There are two ways that the k-fitness and k-survivability could fail to be useful: 1) if long-term outcomes are simply not very predictable; in that case, estimating the long-term metrics will not be informative about what will happen in a new replicate; or 2) if the short-term outcomes (e.g., the 1-fitness) completely, or very strongly, determine long-term outcomes. Experimental setup We will consider the long-term evolutionary outcome of a replicate to be set of lineages, out of those initially present, that survive in the long term. For example, if one lineage always outcompetes the others, driving them extinct, in every replicate, then the outcome is certain predictable. We present two sets of experiments. In the single deme experiments, we examine a single deme (D=1) of N=8192 individuals. The population is founded by L=128 founder individuals that were screened for viability; N/L clones of each is made for a total of N individuals. The mutation rate is µ=0.01 per individual per generation, σ=0.1, a=1, and c=0.25. We simulated 32 scenarios; each scenario corresponds to a new set of founders and new uinit and utarg vectors. We ran R=512 replicates of each scenario. In each replicate, all of the above conditions are the same, except we set a different random seed just before evolution begins; this produces different stochastic mutations and stochastic sampling (down to the population size N at each generation) in each replicate of a scenario. Thus the replicates as a group paint a statistical picture of the scenario. Each replicate runs for Gmax=2,000 generations. We use the following quantitative metric of evolutionary predictability [6]. Call s(i, j, k) the “survival state” of lineage i in replicate experiment j at generation k. s(i, j, k) = 1 if lineage i has any living members at generation k of replicate j, and 0 otherwise. The “joint survival state” M(j, k) is a binary vector composed of elements s(i, j, k), ordered by i; it indicates the realized survival state of all lineages at generation k of replicate j. If there are L lineages, there are 2L possible joint survival states at any time, in one replicate. By averaging over multiple replicates, we can estimate pm(k), the probability that each joint survival state m will occur at generation k. In the multiple deme experiments, we examine a metapopulation of D=16 demes of N=512 individuals (for a total population of ND=8192), connected by random migration among all demes. There were again L=128 founders in total. All ND/L=64 clones of each founder are initially assigned to the same deme. The initial vector, uinit, is the same in all demes, within a scenario. However, each of the 16 demes is assigned a distinct target vector, utarg, related in the following way: We generate a first We compute the entropy of the joint survival state at time k, , as a measure of the unpredictability of evolutionary outcomes in a particular evolutionary system (i.e., a particular scenario). 729 eventually fixes. Its long-term fitness at generation k=2,000 is =128; thus it has increased by a factor of 128, which vector (by drawing M elements uniformly from the range 0 to 1 inclusive) and assign it to deme 1. We make a copy of this vector, subject each of its M elements to a chance p=0.1 of being replaced with a new random draw, and assign this vector to deme 2. By this process, we sequentially generate a vector for each of the 16 demes, with a chance of the vector being modified each time; each subsequent vector may thus become increasingly different from the first one. This is to create some continuity among the demes, to give new migrants a greater chance to invade. We conducted R=512 replicates of 32 such scenarios. Again, each scenario has different founders and target expression vectors; and each replicate of a scenario differs only in the stochastic events (mutation, sampling, migration) that occur. Here, the number of generations is Gmax=100,000 (because it takes longer to reach equilibrium in a metapopulation [9]), µ=0.01 per individual per generation, σ=0.1, a=1, and c=0.25; the migration rate is mig=0.01. is the maximum possible. (Since each lineage is founded with N/L clones and the maximum count is N, the maximum possible at any k is L.). In the center plot in the top row of Figure 2, the plot of indicates that lineage 0018 never goes extinct: it has a 100% chance of survival to generation 2,000; all other lineages go extinct between approximately generation 5 and 200. This happens in all 512 replicates (otherwise they would show a small probability of surviving); thus the evolutionary outcome – survival of lineage 0018 only – is extremely repeatable for this scenario (first row). The top right panel of Figure 2 quantifies this predictability at each generation k: H joint (k) , in black, starts at zero because, initially, all 128 lineages are certain to be alive. It increases rapidly to a value of 9. Since we performed 512 replicates, the maximum observable joint entropy is log2(R=512)=9; this is observed when a different joint survival state M(j, k) occurs in every replicate j. Thus our observations of H joint (k) are “clipped” at a maximum of 9, as 3. RESULTS 3.1 Single deme In Figure 2 we show two scenarios selected from the 32 single deme (D=1) scenarios. Each row plots data from one scenario. The columns show , , and , respectively, indicated by the horizontal dotted line in the entropy plots (right column). (We would have to run more replicates in order to raise this clipping line.) H joint (k) is high between approximately with colored lines for each of the L=128 lineages. (The error show the standard error of the mean.) In bars about generations 5 to 200 because of the uncertainty in the exact , top extinction order of many lineages (note in plot of addition, the plots in the right column also show H joint (k) , in black. All L=128 lineages are plotted; however, in each row, only the five lineages with the highest “weight” (sum of N ( t ) center plot, that many lineages are tending to extinction). over all t) [3] are explicitly labeled in the figure legends. (For example, in the first scenario (row), all 128 lineages are plotted but only the highest-weight lineages, 0018, 0115, 0003, 0103, 0039, are explicitly labeled.) this point, we can be quite certain that a single joint survival state will be observed: that in which all lineages except lineage 0018 are extinct. We can predict with high certainty that, in a new replicate of this scenario, lineage 0018 would again survive alone after generation 200; in contrast, we will be unable to predict with certainty which lineages would be surviving, or extinct, around generation 10 of a new replicate. In the top left of Figure 2, the plot of Since all lineages except one (i.e., lineage 0018) go extinct by generation ~200, H joint (k) decreases to zero by this point. After shows that lineage 0018, in red, immediately dominates the population, and Figure 2. Two selected single-deme scenarios (rows). Columns show k-fitness, k-survivability, and entropy. First row: red lineage dominates. Second row: green is initially fitter, but red wins in the long term; red has a higher “long-term” fitness. 730 In the second row of Figure 2, we show data from another selected scenario for D=1 (out of the 32 single deme scenarios conducted). In this case, something interesting happens: see the bottom left panel of Figure 2. Although lineage 0030 (red) dominates in the long term, it is lineage 0107 (green) that has the higher in the short term. Thus, the short-term fitness and the long-term fitness are distinct. The initial standing variation in a lineage (in our experiments, a lineage initially consists of clones of the founding individual) contributes to the immediate (k=1) and short term (k>1) fitness; however, the new variation that a lineage produces contributes to its longer-term (k>>1) fitness. The green lineage is initially more fit, but the red lineage adapts more effectively. Thus, the green lineage has a higher 30-fitness; we expect it to increase by about 95x by generation 30 (i.e., its = 95). The red lineage increases only about 25x by this time. However, the red lineage has a higher 2,000-fitness: we expect it to increase 105x by generation = 105), while the green lineage is 2,000 (i.e., its Figure 3. Joint entropy averaged over 32 single-deme scenarios. Long-term uncertainty is less than one bit! expected to increase only about 20x by k=2,000. scenarios is plotted (error bars show the standard error of the mean). We see that the two selected scenarios shown in the previous figure were not atypical: typically increases In the center panel in the bottom row, the green lineage is only ~18% likely to survive in the long-term (k=2,000); the red lineage has a much higher of ~82%. In the long term, rapidly to the maximum observable value (log2(R=512)=9), and decreases to just 0.8 bits in the long term. A typical single-deme scenario (with parameters as above) is more predictable than a fair coin flip! Despite the fact that we initially begin with L=128 lineages, one can say, roughly speaking, that there are typically only about two lineages in contention to dominate in the long term, in any given scenario. In this sense, we say that evolution is very repeatable in gene networks. the marathoner, rather than the sprinter, tends to win this race. In the right panel of the second row, notice that the long term , in black, is not zero (unlike in the first entropy, row). This quantifies how uncertain the long-term outcome is in this scenario: about 0.75 bits. We could predict the outcome of a new replicate with less uncertainty than predicting a fair coin flip (1 bit). The colored lines in the bottom right panel plot from generation H i (k) ; they make it clear that the In a single deme, by generation 2,000, one lineage will almost always fix. But if we split the population up into a structured population of multiple demes, then different lineages can survive in different demes for very long periods [9]. Will evolution still be so repeatable in the multi-deme case? ~100 onward is mostly due to uncertainty in the extinction of the red and green lineages; others are likely to be already extinct. In Figure 3, the average of over all 32 single deme Figure 4. Two selected multi-deme scenarios (rows). The short-term and long-term fitnesses are again distinct, and outcomes are quite repeatable (low entropy), despite the fact that multiple lineages can survive in the long term. 731 3.2 Multiple demes initially the most fit, but loses out to lineage 0030 (red) in the long term. In Figure 6, we can see why. In Figure 4, we present two scenarios selected from 32 multideme scenarios (D=16 demes of N=512 individuals each, for a total population of ND=8192). The runs are of Gmax=100,000 generations; other parameters are as specified in Experimental setup. Again, all lineages are plotted in each panel, but only the highest “weight” lineages are explicitly named in the panel legends. In the first scenario (row) of Figure 4, a single lineage, 0055 (red) dominates from the beginning to the end of the experiment, as can be seen in the top left panel. Note in the center panel in the top row, that the red lineage always survives in the long term, but multiple other lineages also have a chance of surviving to generation 100,000. The sum of over all lineages is more than 2.0, indicating that about two lineages survive, on average. (In contrast, in a single deme, a single lineage will almost always fix within 2,000 generations, so the long-term k-survivabilities of the lineages sum to ~1.0.) In the top right panel, the joint entropy in the long term is ~2.5 bits. In the second row of Figure 4, another multi-deme scenario is shown. We selected a scenario in which lineage 0047 (blue) has a high short-term fitness, but does not adapt as well as lineage 0105 (red) or lineage 0026 (green) over the long term. Thus, the short-term and long-term fitnesses are distinct. In the middle panel of the bottom row, multiple lineages have at least a 10% chance of surviving in the long term (in one or more demes). In the bottom right panel, the long-term joint entropy is ~7 bits. Figure 6. Plots of expected counts for each unique genotype belonging to the two highest-weight lineages (0030, red; and 0107, green) from the second scenario of Figure 2 support the view of the lineage as the selected entity. All genotypes that attained at N ( t ) of at least 10 are plotted1 and the black line indicates the total N ( t ) for the entire lineage. The 20 highest-weight genotypes are explicitly named in each panel. The names are ordered (top to bottom) by the time that the genotype attains its peak value of N ( t ) . (Later-peaking genotypes are fitter than earlier-peaking genotypes, in general.) For example, the founding genotype of the red lineage has the name, JU.XANHV.HCU.SX.X.K.D.LTUZ.FRDT.KUC. This string is divided into ten parts separated by “.” characters; each part corresponds to one row of the genotype’s M by M matrix. Within one row, zero values are ignored. (Recall that, in the model, zero values may never mutate into nonzeros.) Nonzero values (which are normally distributed when initially generated) are mapped through the cumulative distribution function (CDF) of the standard normal to produce a number between zero and one; this number is mapped uniformly onto the capital letters ABC...XYZ. Thus an “A” and “Z” represent extreme negative and positive matrix values, respectively. The letters within each row are concatenated, and the rows linked with “.” characters. The name is thus a discretized representation of the matrix, and can be used to roughly follow inheritance and mutation by eye. For example, the second-highest-peaking red genotype arises Figure 5. Joint entropy averaged over 32 multi-deme scenarios. Long-term uncertainty is still low, considering that there are 2128 possible outcomes. In Figure 5, the joint entropy averaged over 32 multi-deme scenarios is shown: the uncertainty is about 5.3 bits in the long term for the multi-deme scenarios (as defined). Starting with L lineages, with 2L possible outcomes (joint survival states), only a handful of the possible outcomes are observed with significant frequency. Thus, we may again say that, even for multi-deme scenarios, evolution in gene networks is very predictable. (See [7] for a metric that quantifies how surprising a particular degree of predictability is, based on the negentropy.) 3.3 The lineage as the selected entity In Figure 6, we plot the expected counts, N ( t ) , of individual genotypes. In the two panels of the figure, we plot genotypes from the two highest-weight lineages from the second row of Figure 2; this is the scenario in which lineage 0107 (green) is 1 N ( t ) is averaged over 256 replicates; at any generation in a replicate, genotypes with a count of 1 are ignored. 732 The gene networks model used here was originally derived from a model of artificial neural networks [11]; it is not unlikely that commonly-used neural network models also possess a predictive long-term fitness. around generation 15 and peaks around generation 100; it is named JU.XANHV.HCU.SA.X.K.D.LTUZ.FRDT.KUC. It has a single mutation relative to the lineage founder: the row SX changes to SA (where X represents a very positive matrix value, and A a very negative value). This mutation and others at the same locus (e.g., to SD, SC, SE) permit the red lineage, which is initially less numerous than the green lineage (see bottom left panel of Figure 2), to overtake it. Subsequently, a number of genotypes (lower eight labels in upper (red) panel of Figure 6) descend from these and other contemporaneous competitors in a third wave of increase. The green lineage, founded by GO.EOVHO.UFQS.DSG.OXU.EZ.EOHR.ZFQ.MEX.JEI, does diversify into many other genotypes, but fails – repeatedly in many replicates – to promptly find a genotype to answer the challenge of the red lineage’s SX to SA mutant (and similar variants). This figure reinforces the view that the lineage is the entity that possesses a long-term fitness, rather than a particular individual or genotype. The long-term success of the red lineage is not due only to its founding genotype, or solely to any particular genotype. The failure of the green lineage is due to the repeated inability of the lineage as a whole to attain superior points in genotype space. The immediate fitness of the founding genotype only influences, but does not fully determine, the longterm success of the lineage. Natural selection has been described as being “short-sighted” [1]. We have shown here that this need not be the case in gene networks (for example, in the bottom rows of Figure 2 and Figure 4, respectively). The long-term fitness is only partly predicted by the short-term fitness, and is therefore distinct from it. Long-term selection on lineages can repeatedly trump shortterm selection, under some conditions. (For example, see [6] for the effects of population size on the balance between short-term and long-term selection.) In asexuals, each individual organism is the founder of a new lineage. Also, each organism is a member of many lineages: those founded by each of its ancestors. (We will fully treat the extension to sexual lineages in a future paper. Here, suffice it to say that sexual lineages are similar if we restrict the founding of sexual lineages to speciation events: the members of each new species comprise the founders of a lineage. This restriction implies that sexual lineages, like asexual lineages, cannot fuse.) When an organism dies, it affects the k-fitness and ksurvivability of many different lineages: those founded by each of its ancestors. Likewise, the reproductive success of one organism affects the success of its many ancestor lineages. In the simulations discussed above, we selected a set of founding individuals at generation zero and tracked their and 4. DISCUSSION A particular evolutionary process might be chaotic: a tiny difference in the state at one moment in time will lead to unbounded future changes in the dynamics. However, we have shown that this is not the case in the gene network model, as defined. Instead, long-term evolution in gene networks is very repeatable, and hence a new replicate experiment is predictable. This implies the existence of basins of attraction in the multidimensional space formed by the genetic landscape (i.e., the mutational neighborhood in this, asexual, case), the genotypephenotype map (the gene network “developmental process” illustrated in Figure 1), the fitness landscape (due to the fitness function and target expression vector(s) in a particular scenario), and other details of the population genetic model. The entire metapopulation as a whole can be considered to follow these basins of attraction, from the initial state, to the final long-term state (as described by the joint survival state of the lineages at generation k). Although different stochastic events (mutation, sampling, migration) occur between replicates, nonetheless the basins of attraction, or “evolutionary pathways”, are constant within an experimental scenario, and we have shown that they converge to a relatively small number of outcomes with significant probability. The metrics illustrated here give a quantitative summary of this high-dimensional space of pathways. Despite this complexity, the metrics are easily measured in any model in which one can: 1) periodically count the membership of each lineage, and 2) conduct a sufficient number of experimental replicates of a given scenario. ; but we could have also selected any individual at some generation t of any replicate and “forked” the replicate at that and of the newlypoint, in order to compute the founded lineage from that point. Thus, selection on lineages is layered and recursive: many layers of overlapping lineage selection are proceeding simultaneously at all times. The “viewpoint” of the lineage as the selected entity may seem alien. To a lineage, survival is more fundamentally important than increase to high numbers of individual members [6]. Individuals are expendable, until their numbers become small. While lineages do have to be immediately fit to survive in the short term, their ability to adapt and diversify is also important to their survival over the long term. Individual organisms do not have such long-term concerns. If we wish to employ the power of artificial evolution on a large scale to produce artifacts of great complexity – artifacts that are more complex than we can design or code manually – then we must understand how to harness long-term selection. Without a degree of long-term repeatability, the evolutionary process is doomed to “short-sightedness”, and reduced to brute-force search, or worse: we may apply datacenter-scale computing, but still remain trapped in short-term evolutionary dead ends. Using the metrics illustrated here, we can measure long-term predictability in any given model. One can then tweak and adjust the model – and measure again – in an attempt to emphasize long-term over short-term selection. This suggests a modus operandi to harness long-term evolution to efficiently search very high-dimensional landscapes. It is over the long term that the “magic” of evolution occurs: the gradual accretion of genetic and phenotypic complexity. Emphasizing longer-term selection will enable evolutionary methods to construct a path of multiple stepping-stones – ones that we cannot ourselves foresee – to meet the complex goals that we define for it. Repeatability of evolution has previously been shown for an in silico model of lattice proteins [7]. If the present result in gene networks, and the result in lattice proteins, carry over to biological regulatory networks and biological proteins, then much of biological evolution might be conceived of as proceeding via similar high-dimensional basins of attraction. Indeed, evolutionary repeatability has been observed in vivo: in a model of protein evolution [4, 13] and in bacteria [14]. 733 5. ACKNOWLEDGMENTS [7] Palmer, M.E. et al. 2013. Long-term evolution is surprisingly predictable in lattice proteins. Journal of the Royal Society Interface. 10, 82 (Feb. 2013), 20130026. This work was supported in part by NIH grant GM28016. 6. REFERENCES [8] Siegal, M.L. and Bergman, A. 2002. Waddington's canalization revisited: developmental stability and evolution. Proceedings of the National Academy of Sciences. 99, 16 (Aug. 2002), 10528–10532. [1] Clune, J. et al. 2008. Natural Selection Fails to Optimize Mutation Rates for Long-Term Adaptation on Rugged Fitness Landscapes. PLoS Computational Biology. 4, 9 (Sep. 2008), e1000187. [2] Dawkins, R. 1986. The Blind Watchmaker. W. W. Norton & Company. [9] Slatkin, M. 1981. Fixation probabilities and fixation times in a subdivided population. Evolution; international journal of organic evolution. 35, 3 (1981), 477–488. [3] Desai, M.M. and Fisher, D.S. 2007. Beneficial Mutation Selection Balance and the Effect of Linkage on Positive Selection. Genetics. 176, 3 (Jun. 2007), 1759–1798. [10] Wagner, A. 1996. Does evolutionary plasticity evolve? Evolution; international journal of organic evolution. (1996), 1008–1023. [4] Lozovsky, E.R. et al. 2009. Stepwise acquisition of pyrimethamine resistance in the malaria parasite. Proceedings of the National Academy of Sciences. 106, 29 (2009), 12025–12030. [11] Wagner, A. 1994. Evolution of gene networks by gene duplications: a mathematical model and its implications on genome organization. Proceedings of the National Academy of Sciences. 91, 10 (May. 1994), 4387–4391. [5] Palmer, M.E. and Feldman, M.W. 2009. Dynamics of hybrid incompatibility in gene networks in a constant environment. Evolution; international journal of organic evolution. 63, 2 (Mar. 2009), 418–431. [12] Wagner, G.P. and Altenberg, L. 1996. Perspective: Complex adaptations and the evolution of evolvability. Evolution; international journal of organic evolution. 50, 3 (1996), 967–976. [6] Palmer, M.E. and Feldman, M.W. 2012. Survivability Is More Fundamental Than Evolvability. PloS one. 7, 6 (Jul. 2012), e38025. [13] Weinreich, D.M. et al. 2006. Darwinian Evolution Can Follow Only Very Few Mutational Paths to Fitter Proteins. Science. 312, 5770 (May. 2006), 111–114. [14] Woods, R.J. et al. 2011. Second-Order Selection for Evolvability in a Large Escherichia coli Population. Science. 331, 6023 (2011), 1433–1436. 734