Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
ErrorPropagation.nb
1
Error Propagation
Suppose that we make N observations of a quantity x that is subject to random fluctuations or measurement errors.
Our best estimate of the true value for this quantity is then êêx ≤ sx where
1
êê
x = ÅÅÅÅÅÅÅ ‚ xi ,
N i=1
N
1
sx 2 = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ‚ Hxi - êêx L2
N - 1 i=1
N
are the sample mean and variance. Next, suppose that we compute a derived quantity f @xD. Our best estimate for this
êêê
êêD, but what is the uncertainty in this quantity? This question falls under the heading of error propagaquantity is f = f @x
tion. Let us assume that sx is small enough to use a linear approximation to f @xD near êêx , such that
∑f
êêê
f - f º ÅÅÅÅÅÅÅÅÅÅ Hx - êêx L
∑x
where the derivative is evaluated at êêx . Thus, if we expect the true value of x to lie in the range êêx ≤ dx, the true value for
êêê
f @xD should lie in the corresponding range f ≤ d f where
ƒƒ ∑ f ƒƒ
d f = † ÅÅÅÅÅÅÅÅÅÅ §ƒ dx
ƒƒ ∑ x ƒ
Under the present circumstances we would interpret the uncertainty dx as the standard deviation sx , but often we must
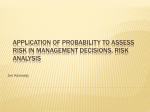
estimate this quantity by other means. As illustrated in the figure below, the steeper is f @xD near êêx the larger is d f for given
dx; this follows simply from the definition of derivative as rate of change. Note that we use the absolute value because
uncertainties are expressed as positive numbers giving the width of an interval.
f @xD
êêê
f ≤df
êê
x ≤dx
x
Now suppose that we measure two variables x and y and wish to compute f = f @x, yD. How accurately do we know
f if the uncertainties in the measured quantities are dx and d y? A crude estimate might simply add two contributions
analogous to the one-dimensional result above. However, this is likely to be an overestimate because sometimes the
fluctuations in the two variables will add and sometimes they will subtract. A more realistic estimate requires statistical
analysis. The simplest situation occurs when x and y are normally distributed random variables. Our best estimates of the
true values for these parameters are then their mean values, êê
x and êêy, with uncertainties given by their standard deviations,
ErrorPropagation.nb
2
sx and s y . Furthermore, we again assume that the uncertainties are small enough to approximate variations in f @x, yD as
linear with respect to variation of these variables, such that
∑f
∑f
êêê
f - f º ÅÅÅÅÅÅÅÅÅÅ Hx - êêx L + ÅÅÅÅÅÅÅÅÅÅ Hy - êêyL
∑x
∑y
êê, êêyL. If we perform many measurements, the variance of f becomes
where the partial derivatives are evaluated at Hx
2
1
1
∑f
êêê 2
i∑f
y
= ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ‚ H fi - f L = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ „ jj ÅÅÅÅÅÅÅÅÅÅ Hxi - êêx L + ÅÅÅÅÅÅÅÅÅÅ Hyi - êêyLzz
N - 1 i=1
N -1
∑y
k ∑x
{
N
N
sf
2
i=1
Expanding this expression
1
s f 2 = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
N -1
N
N
iji ∑ f y2 N
∑ f y2
∑f ∑f
êêyL2 + 2 ÅÅÅÅ
êê
êê yz
jjjj ÅÅÅÅÅÅÅÅÅÅ zz ‚ Hxi - êêx L2 + ijj ÅÅÅÅ
z
Å
ÅÅÅ
Å
Å
Hy
Å
ÅÅÅ
Å
Å
ÅÅÅÅ
Å
ÅÅÅ
Å
Å
z
‚
‚ Hxi - x L Hyi - yLzzzz
i
jj
∑ x ∑ y i=1
k ∑ y { i=1
kk ∑ x { i=1
{
and identifying its terms, we find
2
2
∑f ∑f
i∑f y
i∑f y
s f 2 = jj ÅÅÅÅÅÅÅÅÅÅ zz sx 2 + jj ÅÅÅÅÅÅÅÅÅÅ zz s y 2 + 2 ÅÅÅÅÅÅÅÅÅÅ ÅÅÅÅÅÅÅÅÅÅ sx,y
∑
x
∑
y
∑x ∑ y
k
{
k
{
where
1
sx 2 = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ‚ Hxi - êêx L2 ,
N - 1 i=1
N
1
s y 2 = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ‚ Hyi - êêyL2
N - 1 i=1
N
are the sample variances for each variable and
1
sx,y = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ‚ Hxi - êêx L Hyi - êêyL
N - 1 i=1
N
is their covariance.
This analysis can readily be generalized to an arbitrary number of variables. Let x = 8xm , m = 1, m< represent the set
of variables, such that
∑f
∑f
= „ ÅÅÅÅÅÅÅÅÅÅÅÅÅ sm,n ÅÅÅÅÅÅÅÅÅÅÅÅ
∑ xn
∑ xm
m
sf
2
m,n=1
where
1
sm,n = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ‚ Hxm,i - êêx m L Hxn,i - êêx n L
N - 1 i=1
N
is the covariance matrix and xm,i is the ith measurement of xm . Note that the diagonal elements of the covariance matrix,
sm,m = sm 2 , are simply variances for each variable.
ErrorPropagation.nb
3
The covariance measures the tendency for fluctuations of one variable to be related to fluctuations of another. A
closely related quantity is the correlation
sx,y
Cx,y = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ï -1 § Cx,y § 1
sx s y
which is normalized to the range -1 § Cx,y § 1. If a positive deviation in x (such that xi - êêx > 0) is more likely to be
accompanied by a positive deviation in y, then Cx,y will be positive, whereas Cx,y would be negative if a positive deviation
in one variable is likely to be accompanied by a negative deviation in the other. If the deviations in one variable are equally
likely to be accompanied by deviations of either sign in the other variable , the sum of products of fluctuations will tend to
average to zero and Cx,y will be small. Thus, when Cx,y is negligibly small, the variables x and y are described as statistically independent or as uncorrelated.
It is often impractical to repeat measurements many times. We must then estimate the uncertainties in various
quantities by other means. For example, if we are using a ruler, the uncertainty in length will be about half the smallest
division. In the absence of contrary information, we usually assume that random fluctuations in different quantities are
independent and omit the covariance. The error propagation formula then reduces to
2
2
i∑f
y
i∑f
y
Hd f L2 = jj ÅÅÅÅÅÅÅÅÅÅ dxzz + jj ÅÅÅÅÅÅÅÅÅÅ d yzz + ∫
k ∑x
{
k ∑y
{
where we use the notation dx to represent an uncertainty instead of sx because we use an estimated uncertainty instead of
an observed variance. This formula can be extended to an arbitrary number of statistically independent variables whose
contributions to the net uncertainty are said to add in quadrature because fluctuations sometimes add and sometimes
subtract. Each term is a partial uncertainty determined by the uncertainty in one variable and the rate of change with
respect to that variable. Notice that if the partial uncertainties vary significantly in size, only the largest contributions
matter because squaring before adding strongly emphasizes the larger terms. For example, suppose that d f consists of six
contributions where one term is five units and the other five terms are each one unit, such that
Hd f L2 = H5L2 + H1L2 + H1L2 + H1L2 + H1L2 + H1L2 ï d f = 5.5
The total contribution of the five smaller terms is only one tenth the contribution of the single largest term. Thus, the net
uncertainty
ƒƒ ∑ f
ƒƒ ∑ f
ƒƒ
ƒƒ
d f § †ƒ ÅÅÅÅÅÅÅÅÅÅ dx§ƒ + †ƒ ÅÅÅÅÅÅÅÅÅÅ d y§ƒ + ∫
ƒ ∑x
ƒ
ƒ ∑y
ƒ
is less than the linear sum of partial uncertainties. When designing an experiment, identify the dominant partial uncertainties and attempt to minimize them; the smaller terms do not require as much attention if their contribution to the quadrature
sum is negligible.
A couple of simple examples are listed below. Here a, b, m, n, l are considered exact numbers while x, y are
experimental quantities measured with finite precision.
f = a x + b y ï Hd f L2 = Ha dxL2 + Hb d yL2
2
2
dx 2
idf y
i dy y
f = a xm yn ï jj ÅÅÅÅÅÅÅÅÅÅ zz = Jm ÅÅÅÅÅÅÅÅÅ N + jjn ÅÅÅÅÅÅÅÅÅ zz
x
k f {
k y {
ErrorPropagation.nb
4
f = a Exp@-l xD ï d f = †l f § dx
ü example: measuring g with a pendulum
The period, T, of a simple pendulum is related to its length, L, by
L
ÅÅÅÅÅÅ
T = 2 p $%%%%%%
g
Therefore, if we measure L and T, we can deduce the gravitational acceleration, g, using
dL 2 %%%%%%%%%%%%%%%%
L
dg
2 dT %%%%2%
$%%%%%%%%%%%%%%%%
g = 4 p2 ÅÅÅÅÅÅÅÅÅ
J
ÅÅÅÅ
Å
ÅÅÅ
Å
N
ï
ÅÅÅÅ
Å
ÅÅÅÅ
=
+
J
ÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅ N
L
g
T
T2
Notice that the relative uncertainty in the period carries a greater weight than the precision of the length because it enters
the formula for g with a larger power.
ü example: mean of N measurements
Suppose that we make N observations of the random variable x and compute its mean value
1
êê
xê = ÅÅÅÅÅÅÅ ‚ xi
N i=1
N
What is the uncertainty in the mean? If we assume that the uncertainty, dx, is the same for each observation, then
N
N
2
êê
dxi 2
HdxL2
dx
ij ∑ x
yz
êê
ê
2
Hd x L = „ j ÅÅÅÅÅÅÅÅÅÅÅ dxi z = „ J ÅÅÅÅÅÅÅÅÅÅ N = ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ ï d êê
xê = ÅÅÅÅÅÅÅÅ
ÅÅÅÅ!ÅÅ
è!!!!
N
N
∑
x
k i
{
N
i=1
i=1
Therefore, the uncertainty in the mean is smaller than the uncertainty in a single observation by a factor of 1 ë
è!!!!!
N.
ü example: weighted mean
Next consider the weighted mean
xi
1
êê
xê = „ ÅÅÅÅÅÅÅÅ2ÅÅÅ ì ‚ ÅÅÅÅÅÅÅÅ2ÅÅÅ
si
s
i
i
i=1
where the uncertainties in each observation may be different. Notice that the terms with the smallest uncertainty carry the
most weight. The uncertainty in the weighted mean can be evaluated using standard error propagation to be
Hsêêxê L2
‚i=1 Hsi -2 si L
1
%%%%%%%%%%
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ÅÅÅÅ
ÅÅÅ
= ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅÅÅ
ÅÅÅÅÅÅÅÅÅ ï sêêxê = $%%%%%%%%
2
-2
-2
s
⁄
H⁄i si L
i i
2
ErrorPropagation.nb
Notice that if uncertainties are uniform, such that si = dx is the same for each observation, then this result is the same as
the preceding result for the unweighted average.
5