Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Phase-locked loop wikipedia , lookup
Power MOSFET wikipedia , lookup
Regenerative circuit wikipedia , lookup
Radio transmitter design wikipedia , lookup
UniPro protocol stack wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Index of electronics articles wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Equalization (audio) wikipedia , lookup
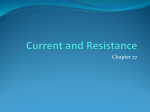
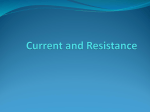
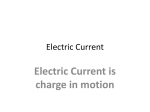
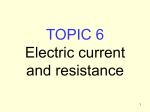
special topic first break volume 26, March 2008 Non-Seismic Methods Multi-transient EM technology in practice Chris Anderson,1 Andrew Long,2 Anton Ziolkowski,3 Bruce Hobbs,3 and David Wright3 explain the principles of multi-transient EM technology and provide some recent survey results from the North Sea. The authors claim significant advantages for their method over the marine controlled source EM operations which currently dominate this emerging market. E lectromagnetic (EM) radiation is a self-propagating wave in space with electric and magnetic components. These components oscillate at right angles to each other and to the direction of propagation, and are 90° out of phase with each other. Electromagnetic radiation is classified into types according to the frequency of the wave: these types include, in order of increasing frequency, radio waves, microwaves, terahertz radiation, infrared radiation, visible light, ultraviolet radiation, X-rays, and gamma rays. EM as used in geophysical exploration operates at very low frequencies from 0.1 Hz up to several tens of kHz, corresponding to the very far left of Figure 1. In its simplest description, the geophysical study of EM behaviour in the shallow earth (upper few km) can identify the spatial location of resistive zones. In a sedimentary basin, because hydrocarbon-bearing rocks are known to show increased resistivity relative to water-bearing rocks, the zones that appear highly resistive may indicate the presence of hydrocarbons. EM methods are members of a family of methods commonly known as the geoelectrical methods. These include direct current (DC) resistivity, induced polarization (IP), and magnetotelluric (MT) methods, all of which now represent precursors to the multi-transient EM methodology operated by PGS. In the DC method the electrical resistivity of subsurface materials in the earth is measured by causing an electric current to flow in the earth between one pair of electrodes (a ‘bipole’) while the steady-state voltage across a second pair of electrodes is measured. The measured voltage is converted to an apparent resistivity which is a value representing the weighted average resistivity over the volume of the earth between the source and receiver. The IP method extends the DC resistivity method by making an additional measurement of the ability of the ground to store electrical charge. IP instruments measure both the conductive and capacitive properties of the subsurface, and operate in the frequency range of 0.01-10 Hz, while the frequency range of active EM measurements on land is approximately 10 Hz-30 kHz. MT is a passive EM technique that uses naturally occurring currents in the ionosphere as the source field to probe the earth. The MT method is by nature confined to much lower frequencies than controlled source EM, and is thus traditionally a low-resolution tool. Role of resistivity data for hydrocarbon exploration As schematically illustrated in Figure 2, high-quality seismic data may discriminate lithology or in the best case, fluids (typically gas rather than oil). Wireline electric logging on a seismic survey scale is impossible, but multi-transient EM surveying can be viewed as ‘logging from the surface’, providing spatial representations of the apparent resistivity in the earth. With appropriate constraints, these data can be spatially correlated with the structural information provided by seismic data, thus allowing a direct pre-drilling discrimination of whether a prospect contains hydrocarbons or not. Figure 1 EM spectrum. Wavelengths in metres (m). 1 Petroleum Geo-Services, London, England, E-mail: [email protected]. Petroleum Geo-Services, Perth, Australia. 3 Petroleum Geo-Services, Edinburgh, Scotland. 2 © 2008 EAGE www.firstbreak.org 93 special topic first break volume 26, March 2008 Non-Seismic Methods Figure 2 Schematic illustration of multi-transient EM-derived resistivity profiles as a complement to the structural information provided by seismic data. Of all geophysical attributes, resistivity is the most sensitive indicator of hydrocarbons in a rock – resistivity can cover three orders of magnitude whereas acoustic impedance may change ±30% due to fluids. In that context, resistivity profiling has the potential to discriminate between commercial and non-commercial hydrocarbon saturation within a reservoir. When combined with seismic AVO data, high resistivity and low acoustic impedance may identify hydrocarbons within porous carbonates. Non-porous non-reservoir carbonates should correspond to high resistivity and high impedance. PGS multi-transient EM experience demonstrates an excellent repeatability of ±1% in extracted resistivity profiles when survey geometry is repeated, and thus the method is applicable to 4D reservoir monitoring of production-related changes. Local reservoir conditions (low porosity and/or heavy oil) can often render a producing reservoir unsuitable for seismic 4D (weak 4D signal), but multi-transient EM is only sensitive to resistivity variations. The following fact, however, must be observed: ‘While all hydrocarbons are resistive, not all resistors are hydrocarbons’. Notable resistors include salt, impermeable carbonates, coals, igneous intrusions, and volcanic layers. Interpretation of apparent resistivity profiles should be constrained by all other available data. It can be shown from Archie’s law (see later) that in a clayfree formation the resistivity of a rock increases with decreasing water saturation/increasing hydrocarbon saturation, increasing water resistivity, and decreasing porosity. It can be shown that the resistivity associated with hydrocarbon-bearing reservoirs increases approximately by an order of magnitude, but can be as high as three orders of magnitude compared with the resistivity associated with water-filled reservoirs. The resolving power of low-frequency EM methods is intrinsically limited by the spatially smooth nature of the diffusing EM fields. EM methods are generally sensitive to the transverse resistance of a layer; the resistivity-thickness product. Therefore, a thin highly resistive layer may be almost indistinguishable from a thicker less resistive layer with the same transverse resistance, and seismic constraints may thus be invaluable. By making measurements at many sourcereceiver offsets and employing a broadband signal this equivalence problem can be greatly reduced and the measurement of other EM field components can help reduce it even further. Multi-transient EM data benefits Figure 3 The typical range of resistivity found in earth materials. 94 This section is not supposed to be exhaustive, although the intention is to demonstrate that the accurate knowledge of the spatial resistivity cross-section of the earth opens many exciting opportunities. www.firstbreak.org © 2008 EAGE special topic first break volume 26, March 2008 Non-Seismic Methods Multi-transient EM technology supplements high-resolution seismic data to support decision-making and risk reduction. Operationally, real-time appraisal is an attractive bonus of the multi-transient EM method; ensuring optimum acquisition results are recorded for every survey, and every source-receiver configuration. Initial resistivity profile results can be generated in the field within 24 hours, potentially providing an early indication of the presence of hydrocarbons and their approximate depths. Because multi-transient EM is sensitive to fluid types contained within the reservoir rocks, it is the ideal tool for regional reconnaissance and initial exploration efforts in new plays and frontier areas. Besides its application to reduce or eliminate the risk of drilling dry holes, the technology can also be used to high-grade (or low-grade!) exploration prospects. This expedites planning and maximizes the economics of a drilling program: n Direct resistivity indicator, n Imaging through complex overburden, provided that it is conductive n Imaging resistors beneath seismic fault shadows n Capable of identifying stacked resistors n Confirmation where seismic AVO results are inconclusive n Confirmation where other direct hydrocarbon indicators (DHIs) are inconclusive n Imaging top resistor surfaces in carbonates n Discriminate hydrocarbon-saturated carbonates n Shallow gas/drilling hazard identification n Mapping tar sand deposits n Locating fresh water aquifers n Gas hydrates identification n Lower-risk drilling decisions. Multi-transient EM has the capability to maximize recoverable reserves and extend the economic life of a field. The technology can be used for 4D (time-lapse) applications to improve reservoir characterization and management. 4D surveys are also becoming increasingly commonplace to monitor movement of water, gas, chemicals, etc., injected into reservoirs during enhanced recovery programs: n Improve upon earlier reservoir imaging and characterization n Distinguish fizz water from commercial gas and accurately image resistors below low-saturation gas clouds n Identify sweet spots and bypassed pay in geological settings where lack of seismic resolution inhibits imaging n Identify and estimate reserves n Enhance reservoir parameter prediction because of high sensitivity to water saturation n Easily integrated into reservoir characterization workflows by direct correlation to log data, structural and stratigraphic interpretations and seismic data n 4D monitoring including permanent monitoring: seismic 4D does not always work n CO2 sequestration Multi-transient EM vs. CSEM Strictly speaking, multi-transient EM can be considered as a class of controlled source EM (CSEM), as the source function used is man-made and therefore ‘controlled’. The implementation, however, is strikingly different. EM exploration for hydrocarbons is usually considered in the context of the electric field component with a source current injected across bipole electrodes because that approach is established as being better for detecting hydrocarbons. It is important to note the concepts of a primary and secondary EM field more commonly associated with the magnetic field component of EM. Normally, if a magnetic source (e.g., a conducting loop) is switched on for a while, the primary Figure 4 Comparison of the time and frequency domain representations of a multi-transient EM PRBS source function and a CSEM continuous square wave source function. © 2008 EAGE www.firstbreak.org 95 special topic first break volume 26, March 2008 Non-Seismic Methods Figure 5 Illustration of the PRBS source function current (left), the measured potential across a receiver bipole (middle), and a deconvolved impulse function for the earth (right). The time scale on the right is 0 – 30 ms. field generated by that source will induce currents in the subsurface of the earth, and these will create secondary magnetic fields. The measured field at a receiver is the total field (primary + secondary). When the primary field is switched off, only the secondary field will be present, from which deductions will be made about the conductivity of the subsurface. In a CSEM frequency domain EM system a receiver measures the secondary field of frequency f generated by a source field also of frequency f. However, in all frequency domain EM systems the secondary field generated in the earth is always recorded in the presence of the primary field, which limits the detection of the secondary signal. Time domain EM systems are usually recorded in the absence of the primary signal, which makes the signal more detectable. Figure 6 Schematic layout of a PGS multi-transient EM onshore survey. 96 A patented deconvolution procedure to separate the primary and secondary fields recorded during a multi-transient EM survey (see below) has been developed by PGS. CSEM for hydrocarbon detection is only considered in the marine environment. Multi-transient EM is equally applicable to both the land and marine environments, although there are operational differences as discussed later. Geophysically speaking, the first-order difference between CSEM and multi-transient EM is that CSEM is a frequency domain pursuit and multi-transient EM is a time domain pursuit. In theory the two techniques will produce equivalent results, but CSEM in practice fails to record sufficient frequency range data to match the advantages of multi-transient EM. Another key difference between multi-transient EM and CSEM is the frequency content of the source waveform. The CSEM method uses a continuous harmonic signal that has traditionally consisted of a square wave with a fundamental frequency of typically 0.01-10 Hz and odd harmonics of the fundamental frequency. Individual frequencies are transmitted one at a time, a process that is inefficient and timeconsuming. As shown in the RHS of Figure 4, in addition to a less-than-ideal frequency spectrum, the CSEM frequency domain amplitudes are proportional to the inverse of frequency. The source waveform used most commonly in multi-transient EM is a pseudo-random binary sequence (PRBS) that has a frequency range from close to zero frequency up to the Nyquist frequency of the receiver unit or the source bit rate of the PRBS. If a step function or PRBS function is used, the current input to the ground does not exactly follow the applied voltage, because the circuit impedance is complex (see Figure 5). www.firstbreak.org © 2008 EAGE special topic first break volume 26, March 2008 Non-Seismic Methods Thus, the input current for each source event is measured. It is then possible to deconvolve the measured output voltage for the measured input current to yield the earth’s impulse response. The receiver voltage response is related to the input source current via the convolutional equation: v(t) = i(t)*g(t) + n(t), where g(t)is the impulse response of the earth, and is uncorrelated noise. This equation applies provided the input signal is constant or zero for a period exceeding the duration of the impulse response g(t). The impulse response can then be recovered by signature deconvolution. The PRBS source type enables the frequency content of the input sequence to be tuned to the depth of interest: a shallow target would employ a high frequency sequence, while deeper targets would use lower frequencies. The layout of an onshore multi-transient EM survey resembles that of a 2D seismic reflection survey (refer to Figure 6). In the onshore EM case, the response includes an airwave that travels at about the speed of light, arriving at the receivers almost instantaneously. After deconvolution the airwave appears as a sharp impulse that precedes the earth’s impulse response. The airwave and impulse response are therefore separable in time, and onshore multi-transient EM can be considered to have no airwave problem. For offshore surveying, PGS multi-transient EM utilizes mature, reliable ocean bottom cable (OBC) technology in water depths ranging from 10-500+ m. The OBC is deployed in a linear configuration with 200 m receiver bipole interval on the seabed where it remains stationary. Thus, the PGS multi-transient EM approach automatically measures the inline component of the electric field, has much denser (inline) receiver spatial sampling than sparsely deployed CSEM nodes, and is operationally much faster to deploy, relocate, and retrieve than CSEM nodes (refer also to Figure 7). The transient source comprises two large electrodes connected to the source vessel by heavy cables, and is deployed via a second vessel. Multi-transient EM uses a stationary source. The data are recorded until sufficient signal-to-noise ratio is achieved, and as is the case on land, real-time quality control is used to monitor the quality of the data as they are acquired. This makes it possible to determine if the signal-to-noise ratio is adequate prior to moving the source to the next point-another advantage over CSEM. As is the case for land EM data, at the water surface there is a refracted wave coupled to the earth; the inappropriatelynamed airwave that travels at almost the speed of light. The receiver receives energy from below that has diffused through the earth, and energy from above that has diffused through the water and refracted at the water-air interface. In shallow water (less than 500 m), the amplitude of the refracted air- © 2008 EAGE www.firstbreak.org Figure 7 Schematic layout of a PGS multi-transient EM offshore survey. wave at the receiver may be much larger than the wave from below, and can often swamp the measured response, thus masking the response from deeper resistors/hydrocarbon reservoirs. Its amplitude is attenuated by increasing water depth and becomes negligible if the depth is great enough. CSEM with an AC source is therefore normally restricted to water depths exceeding 300 m. In contrast, because multi-transient EM use a non-continuous source function it is possible to separate the airwave response from the earth response in the time domain for water depths less than a few hundred metres using patented technology. Resolution In terms of resolution, marine EM measurements are inherently lower in resolution than land measurements. Seawater strongly attenuates the high frequency end of the signal, the result being that only low-frequency signals penetrate to the depths required for hydrocarbon exploration. As discussed earlier, PGS multi-transient EM typically use a PRBS source function to efficiently inject a broad frequency spectrum into the ground (refer also to Figure 8). The frequency range of the source function is modified for each source-receiver offset, so unnecessarily high frequencies are not wasted. Horizontal resolution is half the receiver interval (like reflection seismic), and existing resistivity inversion methods can resolve the top of a resistor to about 10% of the depth. However, multi-transient EM generally resolves the transverse resistance of a reservoir, the product of thickness and resistivity. If seismic data can constrain the target thickness, or well logs can constrain the resistivity, then the other quantity is much better determined by multi-transient EM. Analysis and interpretation of data CSEM surveys derive a resistivity profile of the earth by frequency domain inversion or forward modelling of the 97 special topic first break volume 26, March 2008 Non-Seismic Methods Figure 8 Time (left) and frequency (right) domain representations of mono-frequency CSEM vs. DC resistivity vs. multi-transient EM. CSEM typically only has one or a few frequencies, spatially sampled at a coarse interval over a finite source-receiver offset range with a moving source dipole and stationary receiver dipoles. DC resistivity can be considered as the low frequency limit of CSEM, and uses stationary source and receiver bipoles. Multi-transient EM uses a broadband signal sampled at discrete offsets over a finite source-receiver offset range with stationary source and receiver bipoles. Sampling of the offset range is typically denser with multi-transient EM than CSEM. A transient input generates a broadband input signal, which means that a continuous frequency spectrum dataset is recorded. As the signal passes through more of the subsurface the energy in higher frequencies is absorbed, and the data remaining after this absorption is shown as the pink shaded area on the graph on the right. Therefore at any given offset the multi-transient EM system records all the available frequencies, the orange line on the graph. amplitudes and phase derived at each receiver location. In contrast to multi-transient EM surveys, CSEM surveys cannot recover the earth’s impulse response because of the limited source frequencies available. At least 32 frequencies would be required to recover the impulse response from a CSEM survey, which operationally would require repeatedly surveying the same line with a different switching frequency and exceptional source-receiver geometry repeatability. The remaining discussion below only focuses on multitransient EM methodology. With reference to Figure 9, when a single transient (step) current is applied to the earth, the step response in voltage at a multi-transient EM receiver (land example) starts with an instantaneous increase at time t = 0, whose strength depends on the surface resistivity. This is the airwave, which precedes the earth impulse response. The airwave is followed by a period of little change after which the transient responds to the subsurface resistivity. The response varies with offset. The late time value can be used to determine the DC resistivity value, and is the value that would be achieved if the current remained on long enough. Note that the derivative of the EM field step response is the earth’s impulse response function (Figure 9). The impulse response function is the key to multi-transient EM data interpretation - it contains all the information about the subsurface resistivity. Note in Figure 9 that if the reservoir contains hydrocarbons (red curve) the peak is larger at the reference offset of 1 km than if the reservoir contains water (black curve). Both the amplitude and travel time information in 98 the impulse response are used for building resistivity profiles of the earth. Note again that multi-transient EM typically deconvolve the earth’s impulse response from a PRBS source function, rather than the step function used here to explain the fundamental geophysical principles involved. It can be mathematically proven that the ‘peak’ time of the impulse response to a modelled half-space resistivity model is an explicit function of source-receiver offset and apparent resistivity (ρH). Furthermore, by measuring the gradient of the peak time vs. increasing source-receiver offset an apparent interval resistivity (ρI) can also be estimated. As the modelled half-space impulse response closely matches the real impulse response measured in the field, forward modelling plays a large part in multi-transient EM data interpretation. The relationship between ρH and ρI may be considered as roughly analogous to the relationship between the stacking velocity and the interval velocity in reflection seismology. The extraction of apparent interval resistivity is attractive because these have higher resolution than the apparent half-space resistivities. Real-time appraisal products quickly derived in the field include two pseudo-resistivity analyses that enable real-time decision-making: n Common offset amplitude analysis: Amplitude information from different offsets provides an approximate indication of the depth of resistors being imaged, and enables rapid and accurate delineation of their lateral extent. n Travel time (tpeak in the impulse response) to resistivity mapping, either as an average apparent resistivity or as an apparent interval resistivity estimated from the offsetdependent gradient in tpeak. The pseudo-resistivity value www.firstbreak.org © 2008 EAGE first break volume 26, March 2008 special topic Non-Seismic Methods Figure 9 Modelled step response (left), impulse response without system response (middle), and impulse response with system response included (right), both for water and hydrocarbons in the model half-space. The modelled offset in each case is 1 km. derived is simply the resistivity of a modelled uniform halfspace that has the same arrival time as the peak of the earth impulse response. Thus, the amplitudes will not match the true resistivity. Depth scale is only approximate. Figure 10 shows impulse response data displayed as a series of common-offset sections. The effect of a resistor is noticeable at offsets greater than about twice its depth. High amplitudes are observed between horizontal distances along the profile of 1800-4000 m, and at offsets of about 1400 m and greater. This is interpreted as the effect of the resistor corresponding to the known gas storage reservoir at a depth of 500 m and greater. Turnaround to delivery of this product is typically less than 24 hours. Figure 11 is derived from analysis of the travel time peak of the impulse responses at each source-receiver offset. Again, it is clear that there is a deep resistor between horizontal positions 1800-4000 m overlain by a conductor and variable nearsurface resistors. This interpretation is consistent with the results of the common-offset sections in Figure 10. Office-based processing and inversion products can also be delivered within a week of acquisition (refer to Figure 12): rd n 2D DC dipole-dipole resistivity inversion using 3 party software to fit the late time component of the step response (integrated from the impulse response). n Full waveform multi-offset inversion: Several offsets in CMP gathers are inverted simultaneously using full waveforms, resulting in absolute resistivities as a cross-section function of depth. Generally implemented as Occam inversion; either unconstrained or constrained. Case example: Saturation discrimination and 4D feasibility An empirical scenario based upon Archie’s Law (Figure 13) demonstrates that increasing from 0-30% hydrocarbon saturation in a clay-free rock only doubles the resistivity factor, a standard petrophysical attribute used in resistivity logging. As the trend in Figure 13 is followed to decreasing water saturation (increasing hydrocarbon saturation), however, the impact © 2008 EAGE www.firstbreak.org upon the resistivity factor becomes exponentially greater. Therefore, EM can clearly distinguish commercial from noncommercial in-situ hydrocarbon accumulations. In addition, EM is most sensitive to early production-induced saturation changes, making it possible to evaluate flow-continuity shortly after production is initiated and plan for additional wells necessary to extend plateau production of the field. In the context of 4D (time-lapse) reservoir monitoring, Figure 13 also demonstrates that if the initial in-situ hydrocarbon saturation is 90% and 2/3 of all reserves are subsequently produced, the resistivity factor will decrease from 100 to 2, a significant change that should be easily observable using resistivity cross-sections derived from a multi-transient EM survey. Increasing clay content (e.g. shales) will decrease the comparative resistivity factor from the nominal clean sand trend shown, and carbonates will increase the resistivity factor. Case example: Conflicting seismic amplitudes and multi-transient EM anomaly A multi-transient EM survey of 21.6 km was acquired in water depth of 135 m. Survey duration was less than five days, with the delivery of data products about a week later. Observe in Figure 14 that seismic amplitudes at the target level of 1435 m increase to the left of the figure, away from an existing dry well. In contrast, a strong resistivity anomaly increases in amplitude in the opposite direction, towards the well location. Reservoir interval thickness is 10-50 m. Case example: Confirmation of hydrocarbon pay zone 14.8 km of multi-transient EM data was acquired in water depth of 100 m. Survey duration was less than three days, with the delivery of data products about a week later. A known producing interval occurs at 1700-1900 m depth. Observe in Figure 15 that the multi-transient EM amplitude anomaly correlates with the producing well location, and is absent below the dry well location. Additional 2D surveying and 3D processing and inversion is recommended to properly delineate the multi-transient EM anomaly. 99 special topic first break volume 26, March 2008 Non-Seismic Methods Figure 10 Common-offset sections of the earth impulse response function for offsets 700–2000 m. The horizontal coordinate is the midpoint between source and receiver, and the scale is shown at the top of each figure; the vertical coordinate is time, with the complete axis being 0–100 ms. The grey bar at the top of each section shows where the airwave has been muted out. The relative amplitude scale is denoted by the colour bar (again the airwave has been muted out). The presence of a deep (> 500 m) resistor can be seen at offsets of about 1400 m and greater. From Ziolkowski et al. (2007). 100 www.firstbreak.org © 2008 EAGE special topic first break volume 26, March 2008 Non-Seismic Methods Figure 11 Travel time-to-resistivity mapping in CMP-offset coordinates (refer also to Figure 10). From Ziolkowski et al. (2007). Figure 12 Schematic flow from survey to the delivery of resistivity cross-sections. © 2008 EAGE www.firstbreak.org 101 special topic first break volume 26, March 2008 Non-Seismic Methods Figure 13 The nominal trend shown is the ‘resistivity factor’ for a clay-free rock matrix: The resistivity at particular water saturation (Rt) divided by the resistivity at 100% water saturation (R0). Figure 15 The multi-transient EM anomaly correlates to the producing well, and is absent below the dry well location. correlated with the structural information provided by seismic data. Hydrocarbon fluids and gas can thus be discriminated in terms of location and saturation - prior to any drilling decisions. The method is equally applicable to land, transition zone, and marine, providing greater penetration depth and higher resolution that other EM methods. Multi-transient EM data have much broader frequency content than CSEM data, and are unaffected by the airwave problem. The methodology is intuitively analogous to the seismic method, recording offset, and depth-variant resistivity information from the earth. An extensive suite of applications includes exploration, exploitation and production, and 4D production monitoring. Figure 14 Correlation between a PGS multi-transient EM survey and seismic data in the North Sea. The multi-transient EM data conflict with the seismic amplitude trend. Both North Sea case examples above (acquired in late 2007) verify the resolution and quality of multi-transient EM data in very shallow water - impossible with CSEM data. Acknowledgements PGS Multi-Transient EM is grateful for the cooperation of Apache Corporation and BP in acquiring the data examples shown. References Wright, D., Ziolkowski, A., and Hobbs, B. [2002] Hydrocarbon detection and monitoring with a multicomponent transient electromag- Summary Multi-transient EM is a proven remote sensing method for direct hydrocarbon detection and delineation. Profiles are rapidly derived to describe the resistivity of the earth, spatially netic (MTEM) survey. The Leading Edge, 21(9), 852-864. Ziolkowski, A., Hobbs, B.A., and Wright, D. [2007] Multi-transient electromagnetic demonstration survey in France. Geophysics, 72(4), F197–F209. Looking for the latest www.nearsurfacegeophysics.org publications applied to near surface? 102 www.firstbreak.org © 2008 EAGE