Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
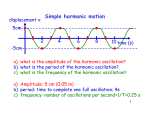
EP225 Note No. 2 Oscillations: Mechanical Oscillations 2.1 Mass-spring system Waves are in general created by something oscillating. For example, sound waves are radiated by various oscillating elements such as speakers, vocal chord, strings in piano and guitar, tuning fork, etc. Electromagnetic waves are also radiated by oscillating (or circulating) charges. In an antenna, electrons are forced to oscillate by an oscillating generator. Through radiation of waves, oscillators lose energy to waves which carry energy (and momentum as well) through space. Fig. 2.1. Mass-spring system. Fig. 2.1. Mass-spring system. 1 Fig. 2.1. Mass-spring system. Consider a mass M (kg) attached to the end of spring with spring constant k (N m 1 ). The mass provides inertia and spring provides elasticity or restoring force. These properties (inertia and elasticity) are basic ingredients of mechanical oscillations and also mechanical waves. Oscillation in a mass-spring system can be started by various means, e.g., hitting the mass, or displacing the mass from the equilibrium position and then release it. No matter how oscillation is started, once started, the same oscillation frequency is observed. For ideal spring-mass system without friction, oscillations prevail without damping. To analyze oscillation of spring-mass system, let us consider equation of motion for the mass, dv = kx (1) M dt where dx v= (2) dt is the velocity of the mass, x(t) is the displacement of the mass from the equilibrium position, and kx is the restoring force exerted on the mass by the spring. Note the negative sign which indicates that the spring always tends to bring the mass back to the equilibrium position (hence restoring force). Substitution of Eq. (2) into (1) yields the following second order di¤erential equation, k d2 x(t) + x(t) = 0 (3) 2 dt M which has a general solution in the form x(t) = A sin !t + B cos !t where A and B are constants that can be determined from initial conditions, and r k (rad s 1 ) != M (4) is the oscillation frequency. The quantity k=M has dimensions of k M = Nm kg 1 = kg m s kg m 2 =s 2 p and k=M indeed has dimensions of frequency, rad s 1 . (The angle radian is dimensionless.) If the mass is displaced by a distance x0 and then released, the oscillation starts with the initial value of x(t = 0) = x0 : Then, A = 0 and B = x0 ; and the solution for x(t) can be uniquely determined, x(t) = x0 cos !t It is noted that giving an initial displacement to the mass involves change in the spring length by the same amount, x = x0 ; and one has to do work with an amount of energy 1 2 kx (J) 2 0 2 given to the spring in the form of potential energy. After oscillation has started, the mass acquires a velocity dx(t) v(t) = = !x0 sin !t dt and corresponding kinetic energy 1 1 1 mass kinetic energy = M v 2 = M ! 2 x20 sin2 !t = kx20 sin2 !t 2 2 2 The instantaneous potential energy of the spring is 1 spring potential energy = kx20 cos2 !t 2 The sum of the two forms of energy is constant, 1 total energy = kx20 2 (Note that sin2 + cos2 = 1:) When the potential energy is maximum, the kinetic energy becomes zero, and vice versa. The mass and spring toss energy between them as illustrated in the …gure. x(t) 2 1 0 0.05 0.10 0.15 0.20 0.25 0.30 -1 -2 Fig. 2.2. Displacement y = x(t) = 2 cos (!t) when !=2 10 rad s 1 : 3 t v(t) 100 50 0 0.05 0.10 0.15 0.20 0.25 0.30 t -50 -100 Fig. 2.3. Velocity of the mass v (t) = dx (t) =dt = 40 sin (20 t). E 2.0 1.5 1.0 0.5 -0.02 0.00 0.02 0.04 0.06 0.08 0.10 0.12 0.14 0.16 0.18 0.20 0.22 0.24 0.26 0.28 0.30 0.32 t Fig. 2.4. Kinetic energy (red), potential energy (black), and total energy (green). Example 1: Derive the di¤erential equation M d2 x(t) + kx(t) = 0 dt2 (5) from the condition of energy conservation, 1 1 M v 2 + kx2 = constant 2 2 Solution: Di¤erentiate (6) 1 1 M v 2 + kx2 = constant 2 2 once to obtain Mv dv dx + kx =0 dt dt 4 (7) However, v= dx dv d2 x ; = 2 dt dt dt Therefore, Eq. (7) reduces to d2 x(t) k + x(t) = 0 2 dt M Example 2: (a) What mass should be attached to a spring with a spring constant k = 10 N m 1 for the system to oscillate at a frequency 5 Hz? (b) If oscillation is started with an initial displacement of 3 cm, what is the maximum velocity of the mass? Solution: 1. (a) The angular frequency is !=2 From != we …nd M= 5 rad s =2 r 1 k M k 10 = = 0:01 kg 2 ! (10 )2 (b) The velocity of the mass is given by v(t) = dx (t) = dt !x0 sin !t Therefore, the amplitude of velocity oscillation is !x0 = 2 0:03 m s 5 1 = 0.943 m s 1 Example 3: If the mass in a mass-spring system is subject to a friction force proportional to the velocity, the equation of motion for the mass is modi…ed as M dv = dt kx fv (8) where f is a constant. Deriving a di¤erential equation to describe oscillation with the friction force, show that the amplitude of oscillation decreases exponentially. For simplicity, assume small friction force such that f !M: Solution: The di¤erential equation for the displacement can readily be found from Eq. (8) by noting v = dx=dt, d2 x dx M 2 +f + kx = 0 (9) dt dt By assumption, the second term involving the …rst order derivative is small. Therefore, we may assume for x(t); x(t) = x0 e t cos !t; ! 5 where ! remains unchanged from the frictionless case, ! = dx = dt d2 x = dt2 ' p x0 ( cos !t + ! sin !t)e x0 [(! 2 2 ) cos !t x0 (! 2 cos !t k=M : Noting t t 2 ! sin !t]e 2 ! sin !t)e t we …nd Eq. (9) reduces to M x0 (! 2 cos !t 2 ! sin !t)e t f x0 ( cos !t + ! sin !t)e t + kx0 e t cos !t = 0 This must hold at any time t: Therefore, the coe¢ cients of both cos and sin functions must identically vanish. Recalling !; we …nd f 2M The graph below shows damped oscillation when = e y 0:005 t = 0:0025!: cos 2 t 1.0 0.8 0.6 0.4 0.2 0.0 10 20 30 40 50 -0.2 60 70 80 90 100 x -0.4 -0.6 -0.8 -1.0 Example 4: Find (a) the e¤ective spring constant of two springs k1 and k2 connected in tandem and then (b) the oscillation frequency when a mass M is attached. 6 Solution: Both springs experience the common force F , F = k1 l1 ; where F = k2 l2 l1 is the elongation of spring 1 and l2 is that of spring 2. The total elongation is l = l1 + l2 1 1 = + F k1 k2 k1 + k 2 = F k1 k 2 Therefore, the e¤ective spring constant is ke¤ = k 1 + k2 k 1 k2 and the oscillation frequency is != r ke¤ = M r k1 k2 1 k1 + k2 M Example 5: Find the oscillation frequency of the system shown. Solution: The restoring forces provided by the springs are additive and the e¤ective spring constant is k1 + k2 : The oscillation frequency is therefore given by r k 1 + k2 != M Example 6: Find the oscillation frequency of the system shown. The cylinder (mass M , radius a) rolls on the ‡oor without slipping. 7 Solution: The moment of inertia of the cylinder about its axis is 1 IC = M a2 2 The translational velocity of the cylinder v is related to the rotational angular velocity d =dt through d dx =a v(t) = dt dt The sum of three energies (potential, kinetic, and rotational) is constant, 1 2 1 1 kx + M v 2 + IC 2 2 2 d dt 2 = constant or noting 1 IC 2 2 d dt 1 = M v2 4 we have 1 2 3 kx + M v 2 = constant 2 4 Di¤erentiation with respect to time yields 3 dv kxv + M v =0 2 dt which reduces to d2 x 2 k + x=0 dt2 3M Therefore, the oscillation frequency is given by r 2 k != 3M 2.2 Ordinary Pendulum Pendulum in a grand father’s clock is a familiar oscillation system. The restoring force is provided by gravity and the mass M of the bob cancels between the inertia force M dv=dt and the gravitational force M g: The oscillation frequency of a pendulum is practically independent of the mass. The motion of the bob is constrained along the arc determined by the length of pendulum L and equation of motion for the mass may be written down as d2 ML 2 = dt M g sin where it is noted that the velocity of the bob along the arc is v(t) = L (t): The sin factor is the component of the downward gravitational force in the direction as shown in Fig. 1.8 (p. 11). Cancelling the mass in both sides, we obtain d2 g + sin = 0 2 dt L 8 (10) This is a nonlinear di¤erential equation for . If the oscillation angle (rad), sin ' holds and Eq. (1) can be linearized as is small, j j d2 g (t) = 0 + dt2 L 1 (11) which describes sinusoidal oscillation with a frequency r g != (12) L p If L = 1 m, the oscillation frequency is ! = 9:8 rad/sec = 3.13 rad/sec, or = 0:498 Hz. The nonlinear equation Eq. (1) has been a subject of extensive studies in the past and its solutions are now well understood. That the oscillation frequency should decrease with the amplitude of oscillation can be seen from the following qualitative argument. The function sin can be Taylor expanded as 1 3! sin = 3 + 1 5! 5 : Retaining up to the third order term and substituting into the original equation, we obtain for 2 < 1 (not necessarily j j 1); g d2 + 2 dt L 1 6 1 2 (13) =0 This predicts an oscillation frequency which now depends on the amplitude, s 2 g 0 !( 0 ) = 1 L 6 0; A more detailed analysis only changes the numerical factor, s r 2 2 g g 0 0 !( 0 ) = 1 ' 1 L 8 L 16 (14) It should be noted that the above result is still subject to the assumption of small oscillation amplitude. For large amplitude approaching , the nonlinear equation has to be solved without approximation. In the Web site, oscillations with small and large amplitudes are shown in animation. Solutions for 0 = 0:1 (small amplitude) and 0 = =2 (large amplitude) are shown below. The period when 0 = 0:1 is close to 2 but increases to about 6.67 when 0 = 1. 0 theta 0.10 0.05 0.00 -0.05 -0.10 2 4 6 8 10 = 0:1 12 9 14 16 18 20 22 24 26 28 30 t 0 = =2 y 00 + sin y = 0 y 0 (0) = 0 y (0) = =2 , Functions de…ned: y y theta 1.5 1.0 0.5 0.0 2 4 6 8 10 12 14 16 18 20 22 24 26 -0.5 28 30 t -1.0 -1.5 Example 7: Pendulum is still in wide use to measure the gravitational acceleration g which varies from place to place. What is the % change in the oscillation frequency if g changes by 1 %? Solution: Let the change in g be g): The oscillation frequency is r g+ g ! = L r s g g = 1+ L g r g 1 g ' 1+ ; L 2 g g( where use is made of the binomial expansion, (1 + x)n ' 1 + nx; jxj 1 If g=g = 0:01; the change in the oscillation frequency is approximately 0.5 %. Although the change in the frequency is small, it manifests itself in the number of oscillations over an extended period. For example, a pendulum having a length of L = 24:8 cm oscillates at = 1 Hz or 3600 times per hour if g = 9:80 m/sec2 : 0.5 % change corresponds to 18 oscillations per hour which can be easily detected. 10 Example 8: A pendulum on a boat or submarine is subject to unwanted (noise) acceleration as well as the gravitational acceleration. An ingenuous way is to use two pendulums to get rid of unwanted acceleration. Explain how. Solution: Let the unwanted force be f (t): The equations of motion for each pendulum are d2 1 +g dt2 d2 2 L 2 +g dt L 1 = f =M; 2 = f =M: Subtraction yields d2 L 2( 1 2 ) + g( 1 2 ) = 0; dt which means that the di¤erence between the two oscillation angles is not subject to the unwanted force. This principle has made it possible to measure g in oceans. 2.3 Physical Pendulum Any object freely pivoted becomes a pendulum. The oscillation frequency is determined by the moment of inertia I (kg m2 ) about the pivot and the distance between the pivot and the center of mass d; r M gd (15) != I Although the mass M appears, it is cancelled because the moment of inertia I is proportional to the total mass M: The case of ordinary pendulum can be recovered by noting that for a lumped mass, I = M L2 and thus != r M gL = M L2 r g L Example 9: Calculate the oscillation frequency of a meter stick freely pivoted at its end. Assume a small oscillation angle and g = 9:8 m s 2 . Solution: The moment of inertia about the end of a stick having a length L is Z M L 2 x dx I = L 0 1 = M L2 3 The distance between the pivot and center of mass is d = L=2: Therefore, the oscillation frequency is given by v r u u M gL=2 3g !=u = 2 t ML 2L 3 11 If L = 1 m, we have != Example 10: hung. r 3g = 3:83 rad/sec or 0.61 Hz 2 Determine the oscillation frequency of a circular hoop of radius a freely Solution: The moment of inertia about the pivot is I = IC + M a2 = 2M a2 where IC = M a2 is the moment about the center of the hoop.. The distance between the pivot and center of mass is a: Therefore, r r M ga g != = 2 2M a 2a Example 11: The sweet point of baseball bat, tennis racket, etc. is the impact position which gives a minimum reaction to the grip position. (a) For a physical pendulum with a moment of inertia about the center of mass IC ; distance between the pivot and center of mass d; and mass M; what is the length of a simple pendulum L which would have the same oscillation frequency as the physical pendulum? (b) Show that the sweet point of the physical pendulum is at distance L from the pivot. Solution: 2. (a) The oscillation frequency of the physical pendulum is r M gd != IC + M d2 where I = IC + M a2 is the moment of inertia about the pivot. From r r M gd g != = 2 IC + M d L we …nd the length of a simple pendulum which has the same oscillation frequency as the physical pendulum, IC + M d2 L= Md (b) Suppose an impulse force F acts at the position L from the right. The pivot experiences two forces, a translational leftward force equal to F; and clockwise rotational force about the center of mass. If they cancel, the net force to act on the pivot vanishes. The clockwise angular acceleration about the center of mass is (L d)F = IC 12 and the acceleration at the pivot is a = d (L = d)dF IC IC +M d2 Md = d IC F M = dF to the right Therefore, the rotational force exactly cancels the translational force. Example 12: Sloshing Oscillation of Water. Water in a long lake or bay exhibits slow sloshing oscillation. Its frequency is given by r 12Hg != a2 where a is the length and H is the water depth. Assume a sloshing amplitude h as shown. The CM of the rectangle BCED is at x = 0; y = 1 (H 2 h) and that of the triangle ABC is at 1 x = a; y = H 6 2 h+ h=H 3 1 h 3 Then the CM of the whole water is at xCM = 1 aH ah 13 1 1a a= h 6 6H 1 a (H aH 1 1 2 = H + H 2 yCM = h) 1 2 h 6 1 (H h) + ah H 2 H 1 h2 = + 2 6H 1 h 3 Deviation in y is 1 h2 H = 6 2 x2 6H a The trajectory of (x; y) is a parabola and the CM executes harmonic oscillaltion with a frequeny r 12Hg != a2 y= 14