Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
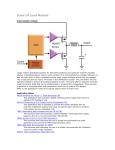
This sample chapter is for review purposes only. Copyright © The Goodheart-Willcox Co., Inc. All rights reserved. 456 26 Objectives After studying this chapter, you will be able to: K Define microcontroller. K Explain the difference between a computer and a microcontroller. K Explain the function of main microcontroller parts. K Identify various types of ROM. K Name the general types of programming languages. K Name some common components found on a microcontroller module. Key Words and Terms The following words and terms will become important pieces of your electricity and electronics vocabulary. Look for them as you read this chapter. arithmetic/logic unit (ALU) assembler program assembly language editor electrically erasable programmable read only memory (EEPROM) erasable programmable read only memory (EPROM) high-level language interpreter library machine code machine language macro masked ROM microcontroller microcontroller interface object code opcode operand port program counter programmable read only memory (PROM) register source code stack stack pointer watchdog timer word size This chapter introduces you to the microcontroller. The microcontroller is a programmable integrated circuit. This means that the microcontroller can be programmed to perform a set of specific functions. The microcontroller Microcontrollers is, therefore, the merging of programming languages and digital logic components. Complex controls that once required thousands or even millions of individual components are duplicated in a single chip. The information in this chapter builds a bridge of technical knowledge between software programs and digital ICs. You will discover how computer software can be used to control integrated circuit devices to achieve the same results as control systems that require many discrete devices. The microcontroller has dramatically changed the way control circuitry is designed. 26.1 OVERVIEW OF THE MICROCONTROLLER A microcontroller is an integrated circuit (IC) that can be programmed to perform a set of functions to control a collection of electronic devices. Being programmable is what makes the microcontroller unique. Often thought of as a “tiny computer” on a single chip, the microcontroller is used in many applications and can be found in almost every electronic device we encounter daily. In this section, you will learn what makes the microcontroller comparable to the computer. You will also learn why the microcontroller has replaced many relays and solid-state devices in industry. Electronic Communication and Data Systems See Figure 26-1. Although the microcontroller and the computer share many common components, there are many distinct differences between them. The major differences between a computer and a microcontroller are • The limitations of the microprocessor. • The amount of memory available for data and program manipulation. • The type of storage available to permanently store a program. A microprocessor inside a computer is more powerful and more versatile than that in a microcontroller. The computer’s microprocessor allows the computer to run a variety of programs and applications. A single computer can be used to perform a variety of functions such as word processing, playing a DVD, playing an interactive game over the Internet, monitoring security systems, and making a CAD drawing. A microprocessor in a microcontroller has a limited instruction set that allows it to run a specific application. In other words, the microcontroller can only understand a limited number of commands, and these commands are specific to the functions the processor is designed to handle. For example, a microcontroller may be designed specifically to monitor and control a fuel injection system on an automobile. In fact, every car manufactured today has many microcontrollers incorporated into its electrical system—antilock brakes, fuel control, air conditioning, heating, and keyless security locks. Each microcontroller on a vehicle is designed to handle a specific function. The microcontroller, like the computer, uses RAM to store programs and data temporarily. The amount of RAM built into a microcontroller is minimal and is usually enough for its intended use. The RAM in a computer is ample enough to run a variety of memory intensive applications. All computers and microcontrollers must have some sort of ROM that contains a permanent set of instructions so that they can communicate with other devices. The microcontroller stores in its ROM the program it needs to perform a specific job. The computer has a ROM, called the BIOS, that contains BASIC programming functions. The computer stores the rest of its programs, operating system and applications, in other storage devices such as a hard drive. A larger capacity for program storage makes the computer more versatile and powerful than a microcontroller and allows it to run many different programs. Although computers are versatile and powerful, the microcontroller has its advantages. Microcontrollers are small and can fit inside other devices like an appliance or a vehicle. Microcontrollers cost less to produce, and they Microprocessor ROM (BIOS) Program and data storage RAM Microprocessor Comparison and Contrast of the Microcontroller and the Computer RAM ROM You will find that many of the terms you will learn in this chapter can also be applied to computers. This is because the microcontroller and the computer share many common components: • A microprocessor to process instructions. • Memory locations to store data and programming information. • Input/output facilities to move data between itself and another device. 455 RAM Figure 26-1. The microcontroller and the computer share similar components. Chapter 26 consume less power. Microcontrollers are used in almost all types of electronic equipment, from coffeepots to laser printers. They are even incorporated into computer systems. They can be found in floppy drives, CD-ROM drives, and video cards. A microcontroller is often embedded into the electronic circuit boards of these computer devices. A microcontroller is usually a single chip, but when incorporated into a large control system, it is referred to as an embedded controller, Figure 26-2. An embedded controller often depends on other components in the system, such as additional memory, to perform its function. Microcontrollers are also used heavily in industry. They have taken the place of relays, solid-state devices, and other discrete components. Microcontrollers 457 Reusable The typical microcontroller is programmable, which means it is reusable. This is especially advantageous for prototyping control circuitry. When developing a complex control system, it is not unusual for it to fail when first applied. As a matter of fact, a complex control project may need to be rewritten and/or rewired many times before it meets design expectations. The fact that the control circuit can be modified by programming rather than rewiring is very advantageous for fast project prototype development. Integrated circuits, such as the microcontroller, are much more dependable than relays. Before microcontrollers, control circuitry relied on many electromechanical relays and timers to control the system. Relays depend on electromagnets to move armature and contact parts, so they eventually wear out due to mechanical friction. Relays are also susceptible to damage caused by dust, dirt, corrosion, rust, insects, and other contaminants that can interfere with the moving parts. Microcontrollers have no moving parts. This provides a much higher rate of reliability. Relays and high-power transistors can be incorporated for final applications to motors, but the actual timing and control logic does not need to rely on the mechanical action of relays. Microcontrollers can be produced at lower costs than their electromechanical predecessors. Also, microcontrollers can be reprogrammed if the designed application does not work correctly or if the application for its use changes. Energy efficient Advantages of Using Microcontrollers in Industry There are a number of advantages to using microcontrollers in industry. Some of the major advantages of microcontrollers are that they are reusable, dependable, cost effective, and energy efficient. Electronic Communication and Data Systems need for skilled programmers and the sensitivity of the controllers to electrostatic charges. EPROM ROM Programming complexity Special skills are required to program the microcontrollers. This requires a higher level of training for some personnel. In addition, there are many different programming languages to choose from. This can lead to a compatibility problem when attempting to merge two dissimilar systems into one control system. Stack area Program counter Bus Instructional register Oscillator General purpose register Instruction decoder Watchdog timer Electrostatic sensitivity Dependable Cost effective Figure 26-2. The microcontroller inside this refrigerator contributes to energy and cost savings by monitoring temperature and controlling the compressor. Courtesy of Motorola, Inc. 458 Because the majority of the circuitry is made from integrated circuits, the energy cost of using a microcontroller is much less than if using individual components of a relay-type logic circuit. Relay logic uses numerous relays wired in series and parallel to form control circuit conditions similar in function to logic gates. A microcontroller consumes less electrical energy than conventional electromechanical devices. Disadvantages of Using Microcontrollers in Industry There are a few disadvantages to using microcontrollers. The two most prominent disadvantages are the Most microcontrollers are composed of complimentary metal-oxide semiconductor (CMOS) integrated circuitry. CMOS can be damaged easily by a static charge. Static precautions must be strictly obeyed. Review Questions for Section 26.1 1. Name three differences between a computer and a microcontroller. 2. What types of devices are controlled by a microcontroller? 3. What is an embedded controller? 4. What are four advantages of using microcontrollers in industry? 5. Name two disadvantages of using microcontrollers in industry. 26.2 MICROCONTROLLER COMPONENTS The microcontroller consists of thousands of digital circuits. These digital circuits are combined into areas that provide specific functions. Examine Figure 26-3. The simplified block diagram illustrates how the major sections inside the microcontroller work together to process the program instructions. The parts of the microcontroller are used to save data and programs, perform math and logic functions, and generate timing signals. The different areas are connected by a bus system. The bus system contains tiny parallel circuits that carry the digital pulse patterns from section to section. The ROM stores the program required for the microcontroller to function. The ROM controls how the chip components operate and how data and instructions flow through the chip. ALU Port A Port B Port C Figure 26-3. A simplified block diagram of a typical microcontroller. All the major components are connected together by a bus system. Data and instructions are moved around the chip via the bus. Ports and Registers There are many different types of registers and ports found inside a microcontroller chip. Ports and registers are special memory locations dedicated to a specific function such as a hardware location or a place to manipulate data. Some ports correspond to the input and output pin assignments of the chip. By placing a one or zero into a specific port address, you can change the pin assignment of the microcontroller from an input pin to an output pin. Ports can also contain information sent to the pins on the microcontroller chip from sensors or switches. The contents can then be stored in memory or remain in the port. A register can be used to hold the contents of data being manipulated. For example, when performing a mathematical operation, the data being manipulated must be stored in two different registers and the result placed in a third register. See Figure 26-4. In the illustration, you see three registers labeled as A, B, and C. The content of register A and the content of register B are added together and then stored in register C. Another typical use of a register is to store a value to be compared to another register value. For example, compare the content of register A to the content of register B. If the values are identical, an action is initiated such as turning on a valve, activating a door switch, or turning on an alarm. The contents of the two registers, A and B, could compare a temperature rise to a preset value, or the distance moved by a robotic arm. As you work with programs and memory, the use and applications for registers will become more apparent. Chapter 26 Register A 00001010 Register A 00001010 Register B 00110000 Register B 00110000 Register C 00111010 When the content of register A is equal to the content of register B, set off the alarm. Figure 26-4. The contents of the two registers can be compared to determine if an action should begin. Microcontrollers 459 ALU The arithmetic/logic unit (ALU) performs common mathematical and logical operations on data. The logical operations are similar to the digital devices you have studied earlier in this textbook. Some typical logic functions are similar to the AND, OR, NOT, NOR, and NAND digital gates. Oscillator Stack Pointer and Program Counter The area in memory that is used to store data and program information is called the stack. The most common use of the stack is to store the program address of the next instruction to be executed. Since the processor processes commands sequentially, one after the other until complete, it relies on the stack to temporarily store the address of the next instruction in case the main program is interrupted. A special device called the stack pointer keeps track of the last stack location used while the processor is busy manipulating data values, checking ports, or checking interrupts. Look at Figure 26-5. Stack Stack pointer value 00 A2 10101001 11110000 00110011 01010101 00011100 11001000 10100010 00110001 Instruction addresses and data Figure 26-5. The stack pointer is responsible for keeping track of the sequence of memory locations, referred to as the stack, while the computer is manipulating data and checking interrupts. Interrupts are, as the name implies, a way to interrupt the processor while it is processing instructions and data to perform a different task. The interrupts come in two varieties: hardware interrupts and software interrupts. An example of a hardware interrupt is when input pin number 3 receives an electrical signal from a push button, and the microprocessor stops what it is doing to respond to the signal. While it is responding to the push button signal (a hardware interrupt), the contents of the program counter are pushed onto the stack. The stack pointer bookmarks the location of the last item pushed onto the stack. When the processor finishes servicing the interrupt, the counter address is popped from the stack and returned to the program counter, and the microprocessor continues processing the instructions in order. The oscillator is a complex digital device that requires a steady digital pulse for timing. All of the separate functions are controlled by one central timing system. The timing pulse provides the basis for proper sequence of all the separate sections of the microcontroller chip. The source of the steady pulse rate is the oscillator circuit. 460 Electronic Communication and Data Systems memory (RAM) and read only memory (ROM). These two types of memory are classified according to their function as memory units. You have already learned about RAM in detail in Chapter 25—Introduction to the Personal Computer (PC). Random access memory is used in the microcontroller just as it is in the computer, to temporarily store programs and data. It is volatile memory, which means it loses its contents when electrical power is no longer applied to the memory chip. Power can be lost due to power failures or by simply turning off the power switch. Read only memory is used to permanently store a program or data and retain the information even when the power is disconnected from the unit. It is described as nonvolatile memory. In Chapter 25 you learned about ROM only as it applied to the computer’s BIOS. In this chapter, we will take a closer look at the many types of ROM. Programmable Memory Watchdog Timer A specialized program often found as part of the microcontroller is called a watchdog timer. The watchdog timer is designed to prevent the microcontroller from halting or “locking up” because of a user-written program. Remember that a processor processes instructions step-by-step. It will wait until one instruction is completed before processing the next. A problem can arise if a command is issued to a processor that cannot be accomplished. For example, a program is written by a user and contains an instruction calling for checking the input value of I/O pin 36. If there is no I/O pin 36, the microcontroller will wait forever for input. It will not process the next command until it receives input on pin 36. Without the watchdog timer, the microcontroller would halt and thus fail to process further instructions. The watchdog timer uses a routine that is based on timing. If a program has not been completed or repeated as a loop within a certain amount of time, the watchdog timer issues a reset command. A system reset sets all the register values to zero. The reset feature allows the controller to recover from the crash. It releases the program and sets the controller to start over again. Memory As stated earlier in this chapter, microcontrollers and computers use various types of memory. These types of memory are usually referred to by acronyms. The two broad classifications of memory are random access ROM is classified as to how it is constructed and how the program code inside the chip can be altered. Masked ROM (usually referred to as just ROM) is a special type of memory that is permanently programmed during the manufacturing process. Masked ROM memory cannot be reprogrammed. To change the program in a system using masked ROM, you must use an entirely different masked ROM chip. Programmable read only memory (PROM) is memory that is programmed after it is manufactured. It is manufactured with thousands of empty memory cells. A program writer "burns" a pattern into the empty cells, forming a program in the blank PROM chip. Like masked ROM, a PROM chip program is permanent for the life of the chip. Erasable programmable read only memory (EPROM) is a special type of PROM that can be reprogrammed many times. When manufactured, a small window is left on the chip. Any program entered into the chip can be erased at a later time by shining an ultraviolet light through the window on the chip. The chip can then be reprogrammed using a programming device. Electrically erasable programmable read only memory (EEPROM) is a type of memory chip that can be erased electrically and then reprogrammed. It is commonly used for the computer BIOS chip. A microcontroller is usually constructed with a PROM on the chip itself containing the basic set of instructions for running the microcontroller and its internal parts. This program is permanent and not alterable. In addition to the basic ROM, another section of memory is used to store programs written by the user. It typically contains a small EEPROM memory area. If larger program storage is required, additional EEPROM chips can be connected to the microcontroller. Review Questions for Section 26.2 1. The special function areas of a microcontroller chip are connected using an _____ system. 2. The _____ keeps track of the data held in the stack area. 3. Math and logic functions are provided by the _____. 4. The _____ circuit provides a steady pulse for timing. 5. A(n) _____ prevents the microcontroller from crashes caused by bad programming. 26.3 PROGRAMMING LANGUAGES AND TERMINOLOGY A variety of languages are used to program controllers and computers. These languages range from the most basic level of machine language to a wide selection of high-level languages. Some languages used to program microcontrollers are C, C++, BASIC, Visual BASIC, Quick BASIC, and numerous proprietary languages such as PBASIC for the Parallax microcontroller. Software programs especially written for programming microcontrollers are usually referred to as editors. Look at the illustration in Figure 26-6. Use this drawing as a reference while we discuss the various languages used to program microcontrollers. Machine Language, Assembly Language, and High-Level Languages One language that can be used to program a microcontroller is machine language. Machine language, or machine code, is a computer language constructed of ones and zeros that represent binary codes and digital voltage pulse levels. The computer understands machine code without further conversion. There is no form of code that is closer to the machine itself, hence the name machine code. Machine code is also referred to as object code or executable code. Machine code matches the type of processor with which it is communicating. For example, an Intel processor cannot use a machine code written for a Motorola (Apple) processor, or vice versa. Chapter 26 High level programming languages Source code C, C++, Basic, Visual BASIC Mnemonics opcode and operand Compiler Assembler Machine code Digital pulses Microcontrollers 461 The main differences between using a high-level language and using assembly language is the amount of code stored after being converted into machine language, and the speed of its execution. Assembly code is difficult and time-consuming to program in, but the code uses less memory and executes faster than high-level code. The assembly code is much more exacting than highlevel programming languages. For example, when using an assembly, you must indicate the exact memory location in which to place the data, and each command must be in sequence followed by the proper amount of data bits. This is more work for the programmer. A high-level language is not as restrictive. The programmer must simply indicate that data needs to be stored in a file. However, when highlevel language is compiled into the low-level machine language, allowances must be made for the fact that no specific memory location was specified. The program must use an additional set of commands to locate a free block of memory that does not conflict with another data block. Higher-level languages are also not as restrictive about putting commands in exact sequence for execution. Assembly code must be in exact sequence, or it will lock up (crash) the system when implemented. Figure 26-6. Compiled from high-level languages, programming language or source code is turned into machine code by a compiler. Machine language is closest to the digital signals found moving through the system circuitry. Binary ones and zeros can be used to illustrate the digital pulse patterns. Compilers and assemblers convert high-level programming languages and assembly language into machine language. Programming Terminology Machine code is difficult to learn and inefficient for writing programs. The main advantage of using machine language programs is that they run more quickly than other types of programming. Machine language programming was the original way to program a microprocessor. Programming in this language was very tedious, and it took many hours to write even the simplest program. Soon, a faster programming language was invented called an assembly. Assembly language uses a series of words, called mnemonics, combined with hexadecimal data values to create a program. After the program is written, it is assembled. An assembler program converts the series of instructions into a machine code that can be read by the processor. Programs written in assembly language are very compact, efficient, and fast. However, simple programs still can take hours to write using assembly language. Most programmers write programs using high-level languages such as C, C++, BASIC, Visual BASIC, and Quick BASIC because it is much easier and faster. Very large programs that would be almost impossible to write in assembly language can be written using a high-level language. The high-level language can then be assembled into machine language code by using a program called a compiler. One of the most difficult aspects of programming is learning all of the new terminology. Many new words have been created, and many common words, such as bit, word, and library, have been given new meanings. Knowledge of these terms will help you understand the manuals that come with microcontrollers. The size of a normal group of bits processed at one time through a computer system is referred to as its word size. The word size typically matches the bus width of the chip. Some common word sizes are 8, 12, 14, 16, 24, 32, and 64 bits in length. A word usually contains an instruction and some data to be acted on. The opcode is the part of a word that contains the instruction to be carried out. Instructions are typically followed by data referred to as the operand. This is a repeating sequential pattern used in programming. Together, the opcode and the operand combine to form the source code. Source code is simply another name for the program written by the programmer. The source code is then converted into machine code by an assembler or a compiler. When source code is assembled or compiled, it becomes what is known as object code and is saved as a file. Object code is also called executable code or machine code. Source code can also be run directly by an interpreter. The interpreter runs the source code without compiling the code into machine code, Figure 26-7. 462 Electronic Communication and Data Systems Many times programmers will save the programs they have written so that they can use the code again on another control system. As you work with programmable devices, you will notice how much of the code can be reused for another project. A library is a collection of code modules. For example, the robot project that is covered later in this chapter can be programmed to perform in a number of ways. It can be programmed to run while connected to a PC. The keyboard arrow keys can be used to control the robot’s movement. The robot can also be programmed to follow a line drawn on a piece of cardboard without being connected to a PC. In addition, the robot can be programmed to use infrared sensors to detect objects in front of it such as a wall. When the object is detected, the robot makes a 90-degree right turn. In every case, you can reuse some of your code blocks rather than rewriting the complete program from scratch. The parts that are reusable can be saved to a code library. Libraries are sometimes referred to as code modules. Some software systems allow you to call the code modules out of a storage memory from the main program. Opcode Operand Source code Interpreter Object code (Stored as a file) Assembler or compiler Figure 26-7. Source code can be run straight from an interpreter or from object code. A macro is a collection of assembler instructions represented by a single word. A macro assembler converts macros into machine language. The term macro and mnemonic are often used interchangeably when talking about programming. Mnemonics, discussed earlier with assembly language, are instructions that can be converted directly into machine language. The mnemonic itself looks like a short abbreviation of the actual command being issued. For example, MOV might be used to represent the instructions to move data. Review Questions for Section 26.3 1. The most basic language, which is composed of ones and zeros, is called _____. 2. Name three high-level languages. 3. Which portion of the source code contains the data, the opcode or the operand? 26.4 THE MICROCONTROLLER MODULE A microcontroller can consist of a single chip, or it can be composed of several components collected together on a circuit board to function as a single unit. When a microcontroller is mounted on a circuit board with other components, it is sometimes referred to as a module or a microcontroller board. A microcontroller module typically consists of a microcontroller, a power source, an interface for connecting to a programming device, I/O ports, and additional memory. A power source is required to power the microcontroller and any accompanying components located on the printed circuit board. An interface is needed to communicate with the controller. The microcontroller interface is usually an older serial connection or a universal serial bus (USB) connection matching the ones found on most PCs. A set of input/output (I/O) ports is used to send and receive signals from the devices the microcontroller is designed to control. The microcontroller’s I/O pins can be programmed as output or input pins. When programmed as an output pin, each pin can output digital signals. When programmed as an input pin, each pin can receive digital signals. Devices commonly controlled through the I/O ports are relays, power transistors, servos, stepper motors, LEDs, and solenoids. Devices that commonly send electrical signals to the I/O ports are photocells, piezocells, thermistors, and thermocouples. LEDs are often used to indicate the presence of power or that communication is taking place, Figure 26-8. Depending on the microcontroller’s intended use, you might find timing oscillators. The oscillator circuit can be a separate component or incorporated into the microcontroller chip. When constructed separately from the chip, a crystal or ceramic resonator is used as well as capacitors and resistors. See Figure 26-9. One advantage of using a separate oscillator circuit is that it can produce a number of frequencies rather than a fixed frequency. By having the ability to produce a wide range of frequencies, the microcontroller can match the frequency required of a large control circuit in which it may be embedded. Additional components such as digital-to-analog and analog-to-digital converters can be used to change the digital pulses into analog signals. If you need to drive a device requiring a higher output current, you can simply Chapter 26 Input and output devices Relays Power transistors LEDs Speakers Stepper motors Photocells Piezocell Thermocouple Thermistor Switches Power supply Microcontroller Interface I/O ports Mem Additional memory Figure 26-8. The basic components found on a microcontroller module and the typical devices to which the microcontroller interfaces. PIC16C5X OSC1/CLKIN Crystal OSC2/CLKOUT Capacitors Figure 26-9. The PIC exterior oscillator circuit is a simple crystal with two capacitors to form a tank circuit. The exact values of the crystal and capacitors will vary depending on the desired frequency and the exact model of PIC being used. incorporate a small mechanical or solid-state relay between the output pin and the load device. A microcontroller chip usually contains a relatively small amount of programmable memory. If a microcontroller is going to be used to run a large or complicated program, or if much data is to be stored, additional RAM and ROM can be mounted next to the microcontroller. A reset button can be added to clear the processor if a program fails. Microcontroller Relay Circuit Many times, the device or devices to be controlled by a microcontroller far exceed the electrical power limits of the controller. A method must be used to increase the power output capabilities of the microcontroller. This can be accomplished many different ways. One common Microcontrollers 463 way is using mechanical or solid-state relay devices. Figure 26-10 shows an application for controlling a device when the electrical requirements far exceed the output power of the microcontroller I/O pins. To drive a load of higher current, a special circuit must be built and inserted between the microcontroller module and the load device. The circuit in the schematic is simple in design. The output pin of the microcontroller connects directly to an optic coupler. The optic coupler consists of an LED and a photosensitive transistor. The optic coupler is designed to prevent higher voltage levels and short circuits in the load device circuit from damaging the sensitive microcontroller chip through a backfeed situation. This could happen if a typical transistor was used. When the LED inside the optic coupler is energized by the output of the microcontroller, the light forces the photosensitive transistor into conduction, thus completing the circuit to the relay. When the relay energizes, the relay contact closes and completes the circuit to a heavyduty device such as an appliance, some lighting, or a welder. Note the fact that the heavy appliance load can use any type of power supply, such as 120 Vac, 240 Vac, 12 Vdc, and 48 Vdc. The components, such as the transistor, are sized according to the relay coil requirements. The diode placed in parallel with the relay coil is used to prevent an inductive kick from damaging circuit components. As you recall from the study of inductance reactance, when a coil is energized or de-energized, the induction voltage created can be quite high. This can damage circuit components such as transistors. The diode prevents the high level by short-circuiting the induction created by the relay coil. When ac is used as the applied voltage in the load circuit, capacitors can also be incorporated into the circuit to prevent damage induced by the ac circuit. In place of a mechanical or solid-state relay, high power transistors, SCRs, or even a TRIAC can be used to increase the output capabilities of a microcontroller. Microcontroller Interface Most microcontrollers interface with an IBM compatible computer through the serial or parallel port. See Figure 26-11. This figure shows the connections for a standard 9-pin serial port PC connection and the PIC16C5X microcontroller, from Microchip Technology. The 9-pin serial port connection is also called a DB-9. The Pins 1, 2, 3, and 4 on the microcontroller are tied directly to pins 2, 3, 4, and 5 on the 9-pin serial port connection. Note that pins 6 and 7 are connected together on the serial port of the PC. This allows the PC to 464 Electronic Communication and Data Systems 120 AC voltage source AC Connect to I/O pin 9 VDC High current load for example: appliance motor, welder, lighting, etc. Optic coupler Relay Relay contact The optic coupler is used to electrically isolate the microcontroller from the relay circuit. Figure 26-10. A microcontroller chip can be connected to heavy loads using a typical circuit as shown. BS2-IC PIC16C5X DSR 6 7 RTS 8 9 1 2 Rx 3 Tx 4 DTR 5 GND 1 SOUT 2 SIN 3 ATN 4 VSS 5 Serial port on PC DB9 Pin connections on microcontroller chip Figure 26-11. This is an illustration of the serial port connections using a BS2-IC. The connection for the BS1-IC is different. Always check the technical specifications of the microcontroller chip. automatically detect communications on the port. Also, be aware that this illustration only refers to a connection to a PIC16C5X microcontroller. It is important to always check the technical specifications sheet of the particular microcontroller you are using. Microcontroller pins for different models have different pin functions. In addition, the parallel port, as well as the USB port, can be used for some microcontroller communications. Review Questions for Section 26.4 1. A microcontroller that consists of several components is called an _____. 2. Name four major parts of a microcontroller module. 3. What is one advantage of using a separate oscillator circuit? 4. Which ports found on an IBM compatible PC can be used to download a program to a microcontroller? 5. Do all microcontrollers use the exact same pin location to connect to a serial port? 26.5 GETTING STARTED WITH MICROCONTROLLERS One of the most used microcontrollers by students and hobbyists are the PICmicro® microcontrollers by Microchip Technology. There are a variety of educational kits that incorporate the PICmicro chips. Two of the most popular kits are the BASIC Stamp 1 & 2 starter kits from Parallax and the PIC BASIC Compiler Bundle from microEngineering Labs. What makes the BASIC Stamp microcontroller unique is that it comes with a built-in interpreter. As you recall, an interpreter reads one line of code at a time and Chapter 26 processes the command. Therefore, you do not need to compile the source code to run the program. You can program the BASIC Stamp with Parallax’s own BASIC language called PBASIC. The BASIC Stamp is sold as a complete package with the BASIC Stamp controller, carrier board, Stamp Software, and cable or as separate components. The cable for the BASIC Stamp 1 connects to the parallel port of your PC, and the cable for the BASIC Stamp 2 connects to the serial port of your PC; although, the BASIC Stamp software communicates serially through both these ports as it downloads the program to the BASIC Stamp. The PicBASIC Compiler Bundle from microEngineering Labs comes with the PicBASIC Compiler, a software package that compiles your BASIC program and downloads it to the PICmicro microcontroller. Included in the Compiler Pro Bundle is the PicBASIC Compiler Pro software that is compatible with BASIC Stamp 2 commands. Both kits come with the EPIC Plus Programmer and a 25-pin cable that connects the programmer board to the parallel port of your PC. Review Questions for Section 26.5 1. What is one the most popular microcontrollers used by students and hobbyists? 2. The language used to program the BASIC Stamp is ______. Summary 1. A microcontroller is an integrated circuit that can be programmed to perform a specific function. 2. When a microcontroller is part of a larger control assembly, it is often referred to as an embedded controller. 3. A microcontroller is perfect for prototyping because it can be easily reprogrammed. 4. A watchdog circuit is designed to prevent a microcontroller from locking up. 5. Machine language is the lowest-level programming language and the language closest to the hardware. 6. Most programmers use high-level languages to write programs for computers as well as microcontrollers. 7. Computers are used to program microcontrollers, and the program is transferred to the microcontroller using serial, parallel, or USB ports. Microcontrollers 465 466 Electronic Communication and Data Systems Test Your Knowledge Please do not write in the text. Place your answers on a separate sheet of paper. 1. Explain the difference between a microcontroller and a personal computer. 2. What is the purpose of the watchdog timer? 3. What does the acronym PROM represent? 4. What does the acronym EPROM represent? 5. What does the acronym EEPROM represent? 6. The programming language constructed of ones and zeros that represent binary codes and digital voltage pulse levels is called _____ language. 7. Name three or more high-level programming languages. 8. A(n) _____ is used to convert a high-level language into machine language. 9. A word is a combination of _____ and _____. 10. Word size is typically equal to the _____ width of the chip. 11. _____ and _____ are special memory locations dedicated to a specific function such as an I/O port. 12. A microcontroller that consists of several components is called an _____. For Discussion 1. Discuss the differences between a computer and a microcontroller and describe some applications for each. 2. Discuss the different kinds of read only memory. 3. Describe some of the functions of a microcontroller. 4. Describe some applications that you can think of for a microcontroller. 5. Discuss your experience with the exploration of technical web sites and your future plans for accomplishing this important task. Closeup of an eraseable programmable read only memory (EPROM) module. Shining an ultraviolet light through the EPROM’s tiny window can erase a program that has been written to the EPROM.