Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Time-to-digital converter wikipedia , lookup
Chirp compression wikipedia , lookup
Spectral density wikipedia , lookup
Opto-isolator wikipedia , lookup
Cavity magnetron wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Regenerative circuit wikipedia , lookup
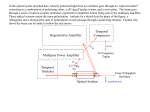
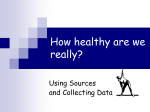
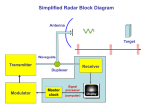
RADAR BY HUGH LUPO MARITIME ELECTRONIC TECH TRAINING WHAT IS RADAR •HOW DOES IT WORK • TRANSMITTER • TRIGGER PULSE • MIC (microwave IC) • IF AMP/ VIDEO • DISPLAY • DIGITAL • FMCW WHAT DOES RADAR STAND FOR ? Radio Detecting and Ranging The radar transmits a signal then receives For a fixed period of time. The echo reflected off a target. The time laps and direction of the return target is then recorded on a screen. The mark on the screen is known as a pip BLOCK DIAGRAM PUSE RADAR SCANNER DISPLAY ANTENNA CIRCULTATOR MAG C MOD C0NTROL PANEL MIC / LNA IF AMP HD, BP PROCESSOR video trigger NAV IN 0183 SHIPS MAINS GYRO OR HDT TRANSMITT •The processor generates a pulse. ( The pulse width is controlled by the range selection) •The pulse is amplified on the modulator board and feed into the pulse transformer •The pulse now is around 4kv and feed to the Magnetron •This oscillates the Magnetron and the 9.4 GHz wave is radiated from the array. 4KV P-P 400 V P-P 12V P-P pulse width 10-20 us 12 VP-P ARRAY TX RX LIMITER BLOCKS INCOMMING RF From the transmitter and other Radars in close proximity RECEIVER •The circulator passes the transmitter signal to the antenna and the receiver signal •From the antenna to the limiter in the MIC •The MIC converts the 9.4 GHz signal down to 60 or 30 MHz depending on the system design. •Rf amp, increases the low level signal •Double balanced mixer, mixes the 9.4 GHz signal with the local oscillator frequency and produces the IF (intermediate Frequency) of 60 or 30 MHz • IF amp increases the IF freq and outputs the video to the display AFTER THE IF AMP BOARD IF AMP BOARD M I C TURNING GEAR The turning gear is made up of the Motor, Ships heading marker switch (flasher) and The Bearing Pulse Generator. •The motor drives the array in a 360 deg continues circle at 24 or 48 rpm •The ships heading marker (flasher) resets the count at 0 deg every revolution to bow reference. •The bearing signal generator outputs a count from the timing disc. This disc has 60 Slots cut in it and uses a photo transceiver to produce a count of 144 rpm as it turns. • This is then converted to a count of 4096 pulses that represents 360 deg on the Screen in the display. One resolution •These signals are all feed into the processor and this gives us the position of the target in reference to the bow of the vessel PROCESSOR EAV ECHO AVERAGING GDC GRAPHIC DISPLAY CONTOLLER RADAR DEFLECTON BOARD CONTRAST AMP PLATE CONTROL DIGITAL RADAR What is the difference ? All signal conversion from analog to digital Is processed in the scanner. The transmitter functions are processed In the scanner. All the information from the scanner is Transported by ether net. The scanner has its own power supply. The scanner now is called a sensor. DIGITAL RADARHall effect position sensor shm MTR RX MOD SPU MD The trigger pulse generated in the Field Programmable Gate Array (FPGA) on the SPU (SIGNAL PROCESSOR UNIT) board is delivered to the modulator (MD) board and used to trigger the magnetron. The Pulse Repetition Frequency (PRF) and pulsewidth of the TX trigger pulse varies according to the range in use. The 60 MHz IF and video signal from the RX module is input to the SPU board and processed by the FPGA. Unlike the radar scanner unit, the DRS sends the video signal to the display unit (MFD) via Ethernet, instead of through coaxial cable. Thus, no video timing adjustment is required 1) SPU board 2) MD (Modulator) board 3) PWR (Power supply) board 4) MTR (Motor control) board for open antenna 5) DRS (Digital Radar Sensor) The control signals including Radar ON/OFF signal are generated in the MFD and sent to the DRS via Ethernet RX module (RXM) The Receiver Module, RXM consists of Microwave Integrated Circuit (MIC) and a semi-logarithmic IF amplifier. The MIC down-converts the RF signal to the 60 MHz IF signal. The V_TUNE signal controls the VCO in the MIC to tune the MIC with the receiving RF signal. The LNA and VGA CONTROL signals control the gain of LNA (Low Noise Amplifier) in the MIC and the VGA (Variable Gain Amplifier) in the IF amplifier. Other signals from the SPU board to the RF module are; (a) VOLTAGE_COMMON The reference voltage output from the ADC is applied to V_COM terminal of the differential amplifier in the IF amplifier circuit. (b) CARRIER_GATE This signal selects the output signal from the IF amplifier to either video signal for normal operation or IF carrier signal for automatic tuning. (c) BAND_WIDTH This signal selects the bandpass filter in the IF amplifier; 1.7 MHz or 20 MHz. (d) MBS_CONT This signal turns on the Main bang attenuator in the IF amplifier. This image cannot currently be displayed. FET DRIVER ON OPEN ARRAY ONLY MTR BOARD The antenna motor used in the DRS is a three phase brushless DC motor with the Hall effect position sensors. The outputs from a set of hall sensors inside the motor are supplied to the SPU board through the MTR board in the antenna. The motor drive circuit consists of the high-side and the low-side drivers. Each side is driven separately by the motor control signals, M HD A/B/C for the high-side and M LD A/B/C for the low-side respectively. The over current and overload detectors output 5 V (“H” signal) in normal condition, and 0 V (“L” signal) in an over current and an overload conditions. *** ***THE 4 & 6 KW OPEN ARRAY HAS A STORAGE CAPACITOR IN THE TXHV LINE MD BOARD The MD board for 2 kW and 4 Kw transmitters in the radome type antenna. The board mainly consists of an FET driver, a switching FET, a pulse transformer, a Rate of Rise of Voltage pulse circuit (RRV), magnetron current detector, and a voltage divider. The open 4 and 6 kw open array has a storage capacitor added in the HV circuit Other than that the circuit is the same. NAVICO BROADBAND RADAR. FMCW Frequency Modulated Continuous Wave This system transmits a MODULATED FREQUENCY for 1 ms. Long increasing in frequency. For example it will start its transmitted signal at 9.400 GHz and stop at 9.410 GHz. The receiver is sweeping the same frequencies and listening for return signal in the Selected band. The receiver is a wide band receiver Both the transmitter and receiver are in continues mode, Not Pulsing. This gives a big advantage with targets, and enhances close in targets The targets are compared to the tx frequency when received and the difference between The Tx and Rx echo frequency to measure the distance. The rest of the system works the same as pulse radar. The use of a magnetron is not Needed for this system, they use semiconductor finals with low power output. Pulse vs. FMCW FMCW Radar Pulse Radar • • Pulsed Transmissions Magnetron – • Used for both transmitting and receiving • – • Pulse length depends on range • Frequency Modulated Continuous Wave Dual Antennas – – High Power Pulse – Continuous Transmissions One continually transmitting One continually receiving Low Power 9.410 GHz Target echo retains the same freq when It was transmitted. Tx Freq 9.405 At any instant in time, Tx Freq is higher Than Rx Freq Rx Freq 9.403 9.400 GHz 1 ms tx time FMCW = Frequency Modulated Continuous Wave The scanner transmits a ‘rising tone’ (Tx wave) with linearly increasing frequency. The wave propagates out from the transmitter retaining the frequency it had when it was transmitted. If it reflects off an object, it will return to the receiver, still at the frequency it had when originally transmitted. Meanwhile, the transmitter continues to output an increasing frequency. The difference between both the currently transmitted and received frequencies, coupled with the known rate of frequency increase, allows a time of flight to be calculated, from which distance is calculated. BP Conventional X-Band Magnetrons Solid State, small X-Band Transmitters are in all Navico Broadband Radars MARTIME ELECTRONIC TECH TRAINING METT [email protected] 203-205-0266 I offer training seminars in marine electronics on theory of many Different subjects. Some include VHF RADIO SSB RADIO ANTENNA THEORY RADAR SAT SYSTEMS BASIC ELECTRONIC CMET Most of this material came from FURUNO OR SIMRAD Service manuals. I thank NAVICO for the support They provided me on the new FMCW system.