Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
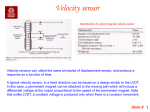
P.W.L.S. Innovations Chris Landry, Project Manager Kosta Papasideris, Systems Engineer Brad Sutter, Hardware Engineer Archie Wilson, Software Engineer Sponsor: Afshin Shaybani, Avicen Corporation Advisor: Dr. Ben Zoghi Sensor Characterization March 10, 2008 Introduction For use with the ExacTrak system, this characterization report was developed. Sensors used in the development of positioning information such as accelerometers, gyroscopes and magnetometers are the integral modules of the ExacTrak system and must first be characterized and calibrated for use. This report outlines test routines and the data collected for the STMicrolelectronics LIS3LV02DQ accelerometer, InvenSense IDG-300 gyroscope and Honeywell HMC6343 Magnetometer, and its purpose is to develop a sensor characterization knowledgebase. Definitions In order to outline the process undertaken to develop an understanding of how the ExacTrak’s sensors should operate in-system, more than just reading datasheets is necessary. Sensor characterization and calibration must be defined. Characterization Sensor characterization is the process of understanding the functionality of the sensor. This includes maximum and minimum output data values, how this data is transmitted, in what form, and what it means to be maximum or minimum. Also contributing to characterization are data sampling rate and data drift between trials. Calibration Sensor calibration is the final step involved in sensor knowledgebase development. When sensor output data is confirmed and consistent, the datasheet’s expected values can then be compared to trial results for each sensor. This data can be interpreted as an error and adjusted accordingly if necessary. PWLS Innovations | pwlsinnovations.com 2 System Data Requirements The ExacTrak System will be used to determine and display the location and orientation of a person through knowledge of: 1. Distance traveled, and 2. Angle of rotation when direction is changed In order to find changes in these criteria we used an accelerometer to measure acceleration which will be integrated twice in software to determine distance traveled, and a gyroscope and magnetometer to measure angular change. Before system data can be collected and interpreted in software, however, each sensor must be characterized so we can understand what the raw sensor data equates to with regards to system requirements. Accelerometer The STMicrolelectronics LIS3LV02DQ accelerometer is a 3-Axis, ±2g/±6g Digital Output, Microelectromechanical System (MEMS) sensor. Being tri-axis, this accelerometer provides orientation information for distances in all three directions of interest (forward/backward, left/right and up/down). Theory of Operation Accelerometers measure the linear acceleration of a system in the system's own reference frame (but without direction), providing data in the form of changes in acceleration per time period based solely on the movement of the system. Figure 1a depicts the accelerometer under no forces. This accelerometer is composed of two fixed capacitive sensing cells and a central mass which is free to move in the direction of the sensed acceleration. When acceleration is applied to the accelerometer, the central mass displaces from its rest position, changing capacitance between its plates and registering the imbalance according to the relationship: where capacitance, C, relates inversely to a change in distance d between the plates. A is the area of each capacitive plate, and ε refers to the dielectric constant of the material between the plates (vacuum = 1). Figure 1b represents the accelerometer under acceleration’s pull and depicts a change in δx between fixed electrodes and movable electrodes, acting as the capacitive plates. PWLS Innovations | pwlsinnovations.com 3 Anchor Point Fixed odes electro Beam B Mass ble Moveab electrod des x0+δx x0-δx (1a) Figure 1a,b: Accelerometer at rest r and unde er acceleration (1b) Charactterization an nd Data Interpretation The LIS3LV02DQ accelerome a eter commu unicates dig gitally follow wing I2C pro otocol and ch can be in nterpreted as a changess in accelerration over a given (or transmitts data whic user spe ecified) sam mpling time.. The datassheet for th his accelero ometer state es that whe en accelera ating in one e axis, norm mal to gravitty and pointting in gravvity’s pull (re efer to Figu ure 2), a deccimal value e representing -1g or -1024 is tran nsmitted. Likewise, L fo or accelerattion normal to t gravity and pointing away from m gravity’s pull, p a decim mal value re epresenting g 1g or 1024 is transmittted. These decimal d valu ues are indicative of th he accelero ometer’s 12-bit data register, th represen nted as 2 bytes b (16 bitts). The 11 bit repressents the sign of the acceleration a n and will be configurred in softw ware to reprresent forward or backkwards acce eleration. The T 12 en is confine ed to a rang ge of 0 to 2 (4096) decimal valu ues. Underrstanding th hese data the signed values v is im mportant in interpreting g the data correctly. As this accelerometer has h a chosen maximum m g-force ra ating of ±2g, we can exxpect signe ed values be etween -20 048 47. and 204 2048 3072 4096, 0 1024 2047 Figure 2: Accellerometer refe erence (±2g unsigned u data a) bsolute minimum and maximum sensor s data a readings are a known, the Once ab accelero ometer can be rotated from -1g to o +1g, an angle chang ge of 180°, representin r ng PWLS Innovations | pw wlsinnovation ns.com 4 the full range r of values under observation. This rota ation mimiccs, in a controlled environm ment, the fo orward and backward movement of a person n with a rela atively consstant accelera ation, and under u gravitty’s constan nt pull. Refferencing Figure 3, the e data reflected by Figurre 2 is interpolated to a rotational motion insstead of a la ateral one. A test for 0g 0 is necessa ary to reflec ct the accele erometer’s stillness be etween axe es. When placed p flat on o a table, the accelerom meter’s xy-plane is un naffected byy the pull off gravity on it, thus transmittting 0g, 0 decimal d for its accelera ation. 1024 (1024) 0 (0) 0 (0 0) 3072 (-1024) Figure 3: Accelerom meter referen nce 180° Testt (±1g signed data) Calibratiion elerometer reflected tyypical datassheet-expeccted resultss, Since initial testing of the acce sensor calibration c consisted c o incorpora of ating and exxtracting the e sign bit, making m sensor output data d reflect true ±2g accceleration. This step is importan nt because utilizing va alues which arre all positiv ve gives uss no immediate knowle edge of movvement, so o signed datta is critical. e the accele erometer, a software filter f was incorporated as a step In order to calibrate ng data tran nsmission to the user. This filter looks at the e 11th bit (ssign bit) and d if it precedin is high, the t sign is negative. This T sign is saved and appended to the num mber once it is subtractted from 2048, making g it fit within the range we require (-2048 to 2047). 2 Befo ore this filterr is utilized,, values are e representa ative of acccurate data, yet subtra acting each value fro om 2048 turns high va alues (>204 48) negative e and low values (<204 48) positive e. Please refer r again to Figure 2. 2 PWLS Innovations | pw wlsinnovation ns.com 5 Data/Results The accelerometer under test reflected datasheet-expected results with relation to simple acceleration tests. The accelerometer was taken from 1g to -1g, with minimum and maximum values of 1024 to 3072, respectively. These results yielded the expected range of 2048, from -2g to 2g. When applying the software filter, and repeating the 180° rotation test, values indicative of negative and positive acceleration (-1024 to 1024) were recorded. Average values of -1023.52 to 1073.76 reflect the test ranges, and Figure 4 displays this test data, stopping at +x, 0, -x and 0 again. 1g, 1024 0g -1g, -1024 Figure 4: Accelerometer Test Routine (-1024 to 1024) PWLS Innovations | pwlsinnovations.com 6 Gyrosco ope enSense ID DG-300 gyro oscope is an a integrate ed dual-axiss, trimmed full f scale The Inve range: ±500°/sec ± MEMS M senssor. Being dual-axis, d th his gyrosco ope providess orientatio on data in the t form of voltage pottential drop ps within a 0 to 3.3V ra ange. Theory of o Operatio on Gyrosco opes use vibrating mecchanical ele ements to sense s rotation. This vibratory sen nsor is based d on the transfer of ene ergy between two vibrration mode es of a struccture cause ed by Corio olis accelera ation. Corio olis accelerration is an acceleratio on arising in n a rotating g referencce frame an nd is proporrtional to the rate of ro otation. Vibrating g gyroscopes use Corriolis accele eration effeccts to sense e when they rotate, establish hing an osc cillatory motion orthogo onal to the input axis in i a sensing g element within th he gyro. An n internal circuit precissely sets an n oscillation for each mass. m When n the senssor is rotate ed about the e X or Y-axxis, the Coriiolis Effect causes a vibration (with velocity, v) that can n be detecte ed by a cap pacitive nettwork. Figu ure 5 displays the Coriolis Effect an nd its accelleration com mponent. Ω v Figure 5: Dual-axis Gyroscope G Exxperiencing Coriolis C Accele eration Coriolis acceleratio on is given by b 2Ω where ac is the Corriolis accele eration, Ω iss the angula ar rate or ro otation, and d v is the velocity of vibration n. See also o Figure 5. Charactterization an nd Data Interpretation enSense ID DG-300 gyro oscope com mmunicatess an analog g signal and d transmits The Inve data which can be interpreted as a chang ge in angular orientation over a given g (or usser specified d) sampling g time. Perr the datash heet the datta is transm mitted at 2m mV/°/sec. Using U this relattionship, if one variablle changes then so do oes anotherr. For exam mple, if we sample every ½ se econd, then we must decrease d on ne of the other variable es either byy a PWLS Innovations | pw wlsinnovation ns.com 7 ½ degree or 1mV per sample. Furthermore, the gyroscope outputs an analog voltage that is steady at 1.5V when not sensing any rotation in the orthogonal axis. The voltage then decreases or increases based on the direction of rotation: decreasing voltage counter clock-wise and increasing voltage clock-wise. Based on the difference between the initial voltage and the final voltage we can then use the given relationship to calculate the change of degree per time interval. Data/Results The Gyroscope was taken through a simple rotation test, similar to the accelerometer. Because the gyroscope recognizes a rotational change in the orthogonal axis to the measured axis (in this case, the X-axis), when rotated from a stationary, 0° position clockwise to 90° and finally to 360°, values representative of rotation about a complete circle were recorded. Figure 6 displays the data collected during this test. 360° 270° 180° 90° 0° Figure 6: Gyroscope Test Routine (0°-360°) PWLS Innovations | pwlsinnovations.com 8 Magnetometer The Honeywell HMC6343 Magnetometer is a 3-axis magneto-resistive device incorporating three 3-axis MEMS accelerometers. The accelerometers provide the ability for magnetic true-north detection despite system orientation. Magnetometers measure the strength and direction of magnetic fields in their vicinity. This information can show heading (cardinal directions) and is represented digitally. Theory of Operation The HMC6343 Magnetometer is Anisotropic Magnetoresistive (AMR), indicating that its ability to “sense” the earth’s magnetic field is proportional to a change in resistance. The basic AMR device consists of strips of a thin film of nickel-iron alloy deposited on a silicon wafer. Typically four of these resistors are connected in a Wheatstone bridge configuration (see Figure 7) so that both magnitude and direction of a field along a single axis can be measured. Figure 7: AMR Sensor Circuit The magnetoresistive characteristic of the nickel-iron alloy causes a resistance change in the bridge induced by the presence of an applied magnetic field. This causes a corresponding change in voltage output from the bridge. PWLS Innovations | pwlsinnovations.com 9 Charactterization an nd Data Interpretation The HMC6343 mag gnetometerr communiccates data digitally d following I2C protocol. p This data is a real-time measure off degrees around a a cirrcle, with tru ue-north is represente ed as 0° and 360°. 3 Figure e 8 graphically represe ents the ma agnetomete er’s range. Figure 8: Magneto ometer Compass Values (F Flat on Table--top) haracterizattion is a tesst of magne etometer ca alibration. Values matcching The nexxt step to ch those in Figure 8 should be ga athered. Th he magneto ometer whe en placed fllat on a tab ble and rota ated on a prre-designed d compass designating g cardinal direction d an nd degree values frrom 0°-100 0° resulted in i data interpreted as both accura ate and app propriate. Further, it was not apparent whether w the HMC6343 magnetom meter could provide reliable data when taken ou ut of its norrmal, flat an nd absolute orientation n. It seemss that the three 3-axis accelerometters allow th his magneto ometer the freedom to o determine e cardinal es) despite orientation. o w the magnetome m eter module e can heading (in degree In other words, be flippe ed, rotated and taken out o of norm mality with th he ground and a still tran nsmit data in the direcction of orie entation with respect to o the earth’’s magneticc north. Data/Re esults gnetometerr under testt reflected datasheet-e d expected re esults with relation r to The mag simple rotational te ests. The magnetomet m ter was takken from 0°,, clockwise and back again, with w North = 0°, East = 90°, South h = 180° and West = 270°. These e results yielded the t expecte ed range off 360°. PWLS Innovations | pw wlsinnovation ns.com 10