Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
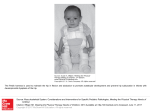
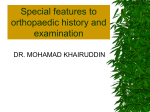
Editorial Brain (2002), 125, 2589±2590 Human gait as a step in evolution The nervous systems in various species do not change rapidly in evolution. Yet the idea that human gait would be controlled in much the same way as it is in other mammals, or indeed even in invertebrates (Clarac et al., 2000) has met a lot of resistance (Capaday, 2001). Nevertheless, as evidenced by Dietz et al. in this issue of Brain (Dietz et al., 2002), we should take this evolutionary idea seriously. From the work on cats it is known that the rhythmic muscle activities during gait are generated by specialized neural circuits located in the spinal cord (the so-called central pattern generator, CPGs for locomotion). Each limb is controlled by such a CPG, either located in the rostral or in the caudal spinal cord, subserving forelimb and hind limbs, respectively (Duysens and Van de Crommert, 1998). These CPGs are coordinated by neurones, which interconnect both sides or which transmit information between the cervical and lumbar spine (Dietz, 2002a, b). Each CPG is guided by sensory feedback to facilitate the transitions between the phases of the step cycle. Two important sources of feedback to the CPGs have been identi®ed. First, signals about the loading and unloading of the limb are important. During the stance phase of gait the load signals increase extensor activity (extensor reinforcing re¯ex) while at the same time suppressing the onset of swing. At end stance the loading decreases and swing can be initiated (Duysens and Pearson, 1980; for review see Duysens et al., 2000). A second signal relates to hip position (Andersson and Grillner, 1981). At end stance the extension of the hip is a powerful cue for the initiation of the swing phase. This cue is thought to come from the stretch of hip ¯exor muscles at the end of the stance phase (Hiebert et al., 1996). Do these cues play a role in human locomotion as well? It would be quite surprising if basic mechanisms, such as the regulation of phase transitions during gait, were to stop with the advent of man. Yet, it has been quite dif®cult to obtain good evidence, especially in man with an intact nervous system in which cortical inputs can overrule underlying re¯ex mechanisms. So far, the strongest evidence comes from two types of human subjects in which the spinal cord receives relatively little cortical input, namely either from infants or from patients with spinal cord injury (SCI). In infants the importance of loading and hip position was demonstrated by hip extension inducing locomotor movements (Pang and Yang, 2000) and by showing that sudden loading of the leg can prolong the stance phase and produce a delay in the ensuing swing phase equivalent to that observed in the decerebrate cat (Yang et al., 1998). ã Guarantors of Brain 2002 In SCI patients one has another chance to study what the spinal cord can achieve in the absence of corticospinal input. First, Dietz and his group demonstrated the importance of load feedback for gait in these patients by showing that manipulation of this feedback is crucial in locomotor recovery (Dietz et al., 1994). In the present issue, the question of hip and load feedback is raised in the context of imposed movements in SCI patients with a complete lesion. The paper from the Dietz laboratory on SCI (Dietz et al., 2002) shows that a close to normal rhythmic locomotor pattern can be elicited when a robotic device [driven gait orthosis (DGO), see Fig. 1] is used to assist the movements in these patients, who cannot walk independently. When the imposed movements were restricted to the hip (the knee and ankle being held in an extended position) a close to normal locomotor EMG pattern could be elicited, provided the appropriate level of body weight support was given. In contrast, imposed movements at the ankle were ineffective to generate these near normal patterns. The data, although obtained so far on a limited number of patients, provide convincing evidence for an involvement of hip and/or load afferents in the generation of locomotor activity. A complete separation of these two inputs was not possible since imposed movements at 100% body unloading were ineffective in eliciting locomotor patterns. The DGO experiments, described in this issue, promises to provide some new and exciting data on the issue of interlimb coordination during gait as well. Unilateral DGO-assisted movements did induce much less contralateral stepping movements in SCI patients than in normal controls during unloaded gait. The present study is the ®rst to describe such limited coordination between the two legs in SCI patients, thereby illustrating that coupling between CPGs is weak when the input from supraspinal structures is reduced. This is in line with cat data showing that interlimb coupling in spinal cats is much weaker than in cats with intact supraspinal control (Dietz, 2002a, b). The present type of evidence is very timely since several recent studies on humans, mostly again from the Dietz group, have shown that human interlimb coordination and re¯exes during locomotor related activities are organized much in the same way as it is in the cat (Dietz et al., 2001; Wannier et al., 2001). The clinical importance of the Dietz et al. (2002) study is best illustrated by the very tool used to investigate the experimental question. The DGO, as illustrated in Fig. 1, is routinely used to train SCI patients on a treadmill. Dietz was one of the ®rst neurologists to realize that gait training on a 2590 Editorial Capaday C. Force-feedback during human walking. Trends Neurosci 2001; 24: 10. Clarac F, Cattaert D, Le Ray D. Central control components of a `simple' stretch re¯ex. [Review] Trends Neurosci 2000; 23: 199± 208. Dietz V. Do human bipeds use quadrupedal coordination? Trends Neurosci 2002a; 25: 462. Dietz V. Proprioception and locomotor disorders. Nat Rev Neurosci 2002b; 3: 781±90. Dietz V, Colombo G, Jensen L. Locomotor activity in spinal man. Lancet 1994; 344: 1260±3. Dietz V, Fouad K, Bastiaanse CM. Neuronal coordination of arm and leg movements during human locomotion. Eur J Neurosci 2001; 14: 1906±14. Fig. 1 Driven gait orthosis (DGO). treadmill could be used to recover locomotor ability in patients with SCI (Dietz et al., 1994). The idea arose from knowledge of cat physiology, since it was long known that spinal cats can be successfully trained to walk on a treadmill, provided there is enough body weight support (Duysens et al., 2000). In addition, some passive movement assistance is often needed and the DGO was developed for this purpose. The present data illustrate that imposed hip extension in combination with body weight support could be very important in treadmill training, thereby con®rming earlier clinical experience. In this way, the Dietz study illustrates that insight into evolution of the nervous system can lead to better therapy. J. Duysens Department of Biophysics, University Nijmegen and SMK-research, Nijmegen, The Netherlands References Andersson O, Grillner S. Peripheral control of the cat's step cycle. I. Phase dependent effects of ramp-movements of the hip during `®ctive locomotion'. Acta Physiol Scand 1981; 113: 89±101. Dietz V, MuÈller R, Colombo G. Locomotor activity in spinal man: signi®cance of afferent input from joint and load receptors. Brain 2002; 125: 2626±34. Duysens J, Pearson KG. Inhibition of ¯exor burst generation by loading ankle extensor muscles in walking cats. Brain Res 1980; 187: 321±32. Duysens J, Van de Crommert HW. Neural control of locomotion. Part 1: the central pattern generator from cats to humans. Gait Posture 1998; 7: 131±41. Duysens J, Clarac F, Cruse H. Load-regulating mechanisms in gait and posture: comparative aspects. [Review]. Physiol Rev 2000; 80: 83±133. Hiebert GW, Whelan PJ, Prochazka A, Pearson KG. Contribution of hind limb ¯exor muscle afferents to the timing of phase transitions in the cat step cycle. J Neurophysiol 1996; 75: 1126±37. Pang MY, Yang JF. The initiation of the swing phase in human infant stepping: importance of hip position and leg loading. J Physiol 2000; 528: 389±404. Wannier T, Bastiaanse C, Colombo G, Dietz V. Arm to leg coordination in humans during walking, creeping and swimming activities. Exp Brain Res 2001; 141: 375±9. Yang JF, Stephens MJ, Vishram R. Transient disturbances to one limb produce coordinated, bilateral responses during infant stepping. J Neurophysiol 1998; 79: 2329±37.