Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Josephson voltage standard wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Operational amplifier wikipedia , lookup
Radio transmitter design wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Opto-isolator wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Equalization (audio) wikipedia , lookup
Index of electronics articles wikipedia , lookup
RLC circuit wikipedia , lookup
Two-port network wikipedia , lookup
Positive feedback wikipedia , lookup
Phase-locked loop wikipedia , lookup
Regenerative circuit wikipedia , lookup
Analysis of scanning tunneling
A. I. Oliva,a) E. Anguiano,
microscopy
N. Denisenko,
feedback system
and M. Aguilar
Institute de Ciencia de Materiales de1 C.S.I.C., Campus de Universidad Autbnoma de Madrid,
C-III, 28049 Madrid Spain
J. L. Pena
Centro de Investigacib y de Estudios Avanzados de1 IPN, Unidad Mhida, A2
&f&ida (yucatrin), M&ico
73-Cordemex, 97310,
(Received 21 November 1994 accepted for publication; 16 January 1995)
A theoretical analysis of the feedback system in the scanning tunneling microscope (STM) is
presented. The proposed model includes all the elements involved in the STM loop. The knowledge
of its behavior allow one to accurately determine the region where the unstable STM operation
could affect the measurements, and also to set the optimal working parameters. Each element of the
feedback circuitry is analyzed and discussed as well as their mutual interactions. Thus the stability
region of a STM has been obtained analytically, using all the possible elements in the feedback loop
and without using simplifications or rare models for the system. The mathematical models for each
element of the loop has been used and the problem has been solved using control theory. Different
working conditions are simulated and analyzed. Some relations for stability conditions, considering
the value of each component involved in the feedback loop, are proposed and analyzed. The good
agreement between theory and experimentation is shown by comparing images taken under
conditions of good stability and of instability. 0 1995 American Institute of Physics.
1. INTRODUCTION
The scanning tunneling microscope (STM) invented by
Binnig and Rohrer’ in the beginning of the 1980s has become in an important instrument in surface science laboratories due to its capability to obtain atomic resolution. The
STM utilizes the high sensitivity of tunnel current flowing
through the gap formed between the sample and a tip. Controlling this current and scanning the tip over the surface of
the sample, the topography of the surface is obtained with
atomic resolution and/or measurement of some electronic
properties of the sample.
During STM operation a sharp tip is scanned over the
sample while the tip is maintained very near the sample and
a bias voltage between them is applied. The vertical positioning of the tip is possible by a feedback circuit. The tip movement quality depends on the parameters used for control and
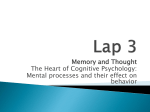
the feedback mechanisms employed. A typical feedback system is shown in Fig. 1, where we can see each component
that we will explain in more detail later on. In general, the
feedback system compares a setup reference with a value
given by the real system. The error value between them is
used to generate a compensation signal that is used to obtain
the control value in the output despite the system perturbations. In one operation mode, the tip position during scanning needs to be maintained at constant height; then the compensation value will represent the surface topography. The
inadequate values chosen for the control parameters can produce instabilities and imprecise movements of the tip during
scanning, giving us false information or, even worse, the
system can oscillate.
The general theory of feedback control can be found in
“Permanent address: Centro de Investigaci6n y de Ektudios Avanzados de1
IPN Unidad Mkrida, AP 73-Cordemex, 97310, Mdrida, Yucadn, Mixico.
3196
Rev. Sci. Instrum.
66 (5), May 1995
several books.’ One of the first works describing a model for
a STM feedback system was realized by Park and Quate.3 In
their work, they introduce the concept of the delay time r in
the scanning system response and find three regions of stability on the feedback system response as a function of a
effective gain (given by the amplifier gain, detector sensitivity, and piezoelectric sensitivity) and the adimensional ratio
RC/r. However, this model is useless because there is not a
clear way to obtain r and RC and impose severe limitations
in the feedback loop.
In other work, Kuk and Silverman4 suggest a more realistic model and with the transfer function obtained from their
control system they find the critical damping response of the
transient response with a net gain of 200.. In this work, they
consider the mechanical response of the tunnel junction as a
double-pole system in order to obtain instabilities. Important
parameters in this model are the natural frequency o, of the
tunnel junction and the quality factor Q of the vibrations
system. In this work the transient response of the STM control as function of the net gain is shown. However, they do
not explain how to measure or estimate the transfer function
parameters.
Jeon and Willis recently proposed a method to experimentally find the optimal feedback parameters for the critically damped response,5 thus dispensing the need to use
mathematics to find out the analytical solution. However,
they never give the values of the parameters used during
experimentation.
A new approximation for the real case is presented in the
work of Hammiche et aZ.,6where they describe a mathematical model for feedback circuit with only an integrator (i.e.,
without the proportional part). They consider the values of
the elements involved in the analysis, but arrive at an equation so complex that they stop the analysis and do not get
any conclusion or result. Another work on control system
0034-6746/95/66(5)/3196/8/$6.00
@ 1995 American
Institute
of Physics
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
_.
j
]
pz
Y
hiJ
-
id:
FIG. 1. Feedback loop circuit diagram.
analysis for STM7 used root locus and Nichols approaches as
tools for stability evaluation but the applicability to real systems is neither easy nor clear.
Recently, a book’ on STM offers, in an instrumentation
chapter, a general view about the stability of the tunnel loop,
suggesting a resonant model characterized by three parameters: undamped resonant frequency UJ,J,quality factor Q,
and a factor a related to the phase response but no hint of
how to locate the stability region of a particular STM is
given.
In this work we present a theoretical analysis of a general feedback system implemented for a STM. We analyze
the case when the mechanical component has two poles (the
most simple case) and consequently instabilities. We describe the model and the conditions to achieve the optimal
values of the control system to avoid instabilities. We propose a condition, based on relations among the control parameters, to assure stable conditions and show images obtained under both stable and unstable conditions.
quency which assures precise positioning. Short times in the
response mean high gains and fast response but less stability.
The tunnel junction is also in the feedback loop which
has an exponential dependence with the separation distance
with the tunnel current given by the equation (see, e.g., Ref.
9)
Z,=(T~V~ exp( - 1.025 J&3),
0)
where a0 is the proportionality constant, V, the bias voltage
(in volts), 4 the average barrier height (in electron volts),
and S the tip-sample distance separation (in angstroms).
To linearize the tunnel current, it is common to use a
logarithmic amplifier to avoid violent responses when sudden changes occurs during scanning. When the surface is
atomically flat, and for atomic resolution analysis, this element can be unnecessary. The tunnel current is detected in
the tunnel junction by using an Z-V converter with variable
gain and its output sent to the logarithmic amplifier for linearization.
II. CONTROL SYSTEM DESCRIPTION
In order to minimize the error signal (that after comparison), different elements such as filters, proportional control,
integral control, and others are used in the feedback loop.
The particular components of the STM system such as the
I-V conllerter, the logarithmic amplifier, and the tunnel
junction are also in the feedback loop. A brief discussion of
the main components follows.
The error system has an output equal to the difference
between the measured value (a signal proportional to the
tunnel current) and the setup reference value. The low-pass
filters can be used before or after the direct loop. It produces
a slow decrease of gain with frequency. The proportional
control moves the tip in proportion to the error. Its value
depends mainly on the tip state, tunnel junction quality, scanning speed, and the piezoelectric sensitivities. High gains
mean fast responses; however, is important to take into account the mechanical resonance of the system as we will see
later on. The integral control gives different response times
on the feedback circuit. It has an infinite gain at zero fre-
Ill. FEEDBACK
MODEL
The control system to be analyzed is shown in Fig. 1.
Our system consists of a proportional-integral controller (p,
in the figure) whose output signal feeds the z piezoelectric
for moving in a certain direction. As response, the z piezo
will suffer an elongation and will change the tip-sample
distance (s) and consequently will change the value of the
tunnel current. This value (volts) is sent to the comparator
G, . This element will give us a signal proportional to the
error between this voltage and the reference voltage, generating the feedback cycle. It is necessary to have an inversor
element in the circuit for loop stability. In this case this condition is given by the inversor input of Gr . Others elements
of the circuit are the current amplifier (I-V converter), the
logarithmic amplifier, the high-voltage amplifier with gain A
to increase the elongation of the piezos, and several RC
poles (F, ,. . . ,F,). These last elements are filters either of
first or second order, added as complement for the PI control.
STM feedback
3197
Rev. Sci. Instrum., Vol. 66, No. 5, May 1995
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
In Fig. 1 these last elements are joined with the PI control
and called p and will represent the total effect during analysis.
From Fig. 1, tip-sample distance S is given by
S=d-h,
(2)
where d is the z-piezo
phy.
Changes in the
changes in the tunnel
The resultant signal is
given by the feedback
elongation and h the sample topogratip-sample distance will generate
current I, in agreement with Eq. (1).
sent to the Z-V converter with a gain
amplifier resistance value R,
V,=RI,.
(3)
K, is the integration constant related to the RC factor of the
circuit by K,= 1JRC in s-* and i is the imaginary unit. Then
P(w)=(K,lio--G2)F1(m).
If the first-order low-pass filter has a cutoff frequency of W,
the response frequency is (1 + iolw,)- ‘. Replacing in Eq.
W,
P(w)=(K,lio-G2)[0,/(0,+iW)].
V,(o)=AV,(w)=AP(w)G1[V,-Vo+a8(w)].
where KL is the conversion factor of the logarithmic amplifier (in volts) and EL its sensitivity (in volts).
Developing Eqs. (l), (3), and (4), we obtain
VI= - 1.025KL loglo(e)@6+KL
logIo(RaoVsIEL).
a=1.025KL
The term d(w) is determined by the potential V,(o);
that applied to the z-piezo produces elongation.
A simple model for d(o) can be
(11)
~(o)Vdo),
where do is the relaxation distance and y(o) the voltage sensitivity of the piezo at the frequency o in &V.
Defining
logto(e)@=0.445KL&
and
Y0=1im
loglo(R~oVBIEL),
Y(O),
02)
W-+0
Eq. (4) can be represented by
V*=-as+vo.
(10)
V,(o)=AP(o)G~{V,-Vo+cr[d(o)-h(o)l).
d(o)=do-
Defining
Vo=K,
BY appWng Eq. (6)
(4)
log,o(V,lE,),
(9)
By now we will maintain the compact notation of p(o)
and we will use the expression in the next section.
Following the path of the signal in Fig. 1, the V,(o)
value is given by
The logarithmic amplifier acts on the signal as
V,=KL
03)
(5)
For the following mathematical analysis we will consider the
signal in its Fourier components (o space) in order to simplify the problems with the differential and integral terms
and to reduce it to an algebraic problem. This means that, as
the tip scan the sample with lateral piezos (x,y), h changes
with time and we can consider without problems that
h= h(o). In similar mode, d modifies its value with time to
adjust h changes. Then we can represent it as d = d( 0). Then
Eqs. (2) and (5) convert to
S(o)=d(w)-h(w),
(6)
v,=-aS(w)+Vo.
(7)
as the response to changes in voltage at null frequency, i.e.,
to infinitely slow changes, and taking positive when positive
bias voltage applied causes an elongation (in other words,
when d decreases).
By substituting Eq. (11) in Eq. (lo),
V,(~)=AP(w)GD’r-ah(w)].
Since V, is such that V,= Vo- ad, (V, being constant),
then
Resolving for V,(w) ,
V4(0)=- 1+aAcc,kty~~‘h(o)*
y(~)
Now we can continue with the analysis of the signal propagation through the loop. After comparator G, , the signal is
V,(w)=G,[V,-V,(w)]=GJV,-Vo+a6(w)].
Vo+ ado- q4o)V,tw>
That can be written as
The next step is
(13)
V,(o)=-W(o)h(w),
with
where p(w) is the transfer function of the /3 module in the
feedback system (see Fig. 1).
For the calculation of P(W) we can suppose that the cutoff frequency of the devices included in /? are over the bandwidth of our interest. A common operation mode is to include a first-order low-pass filter, F,(o) in fl, i.e., with the
PI control.
In this last term, p, the proportional part gives the G2
term and the integrator can be represented as KIliw, where
3196
Rev. Sci. Instrum.,
Vol. 66, No. 5, May 1995
AGl@(o)
w(0)=
l+AG,@(w)y(w)’
(14)
The factor W(w) is known as the closed loop transfer
function. Equation (13) says that the potential V, measured is
essentially the topography of the sample surface with opposite sign but distorted by the W(o) factor. Defining V,,, as
the inverted signal before capturing, then
Vm(w)= -V4(w)=
W(w)h(o).
(15)
STM feedback
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
We also see that W(o) is a dimensional factor. In order to
obtain an adimensional factor, we will define the term h, as
the topography “expressed in volts.” This is
with y. defined in Eq. (12).
Then, the new adimensional transfer function is
G(o)=yoW(o)=
AGI@(w)Yo
~+AGI@(w)Y(~)
*
06)
model
for
piezo
For the z-piezo we will take as a first approximation a
simple model where the piezo responds uniformly at all the
frequencies of our interest. That is, the z-piezo voltage sensitivity will have a constant value with frequency, i.e.,
y(o)=
Thus, Eq. (25) becomes
V,(~)=G(~M,(~).
A. Simple
(19)
Yo-
For the expression of p(o) we will use Eq. (9). For simplicity we assume that w,=m; that holds if filters are not
used. Then Eq. (9) will become
P(w)=(Krlio-G2).
(17)
Thus the measured voltage V at a given frequency is
related to the “true” topography (expressed in volts) h
through the adimensional transfer function G: V=G-h.
(20)
Defining Go, the total gain of the closed loop, as
Go=AGI~yo=0.445KL&$AGI
and introducing Eqs. (19)-(21)
obtain
y.
in Eqs. (16) and (18), we
(22)
IV. STABILITY STUDY AND MODELS FOR THE PIE20
When the tunnel loop stability is studied, is very important to consider the open-loop transfer function G’(w),
which is basically given by the denominator minus 1 of Eq.
(16). This is
G’(w)=AG,ap(w)y(w).
(18)
The stability conditions are usually based on the G’(w)
properties. Thus a system is considered unstable if in some
region of the w space, in which the phase of G’(o) is near
180”, its modulus IG ‘( w)j (called amplitude or absolute
gain, too) is greater than 1 (see, e.g., Ref. 10). As a result the
system will oscillate within frequencies in this region. In this
case the feedback will be now positive. On the other hand, to
achieve a satisfactory performance of the system the gain has
to be lower than 1 in the whole range between the frequency
at which the phase of G’(w) is -180” and the frequency at
which the gain is 1. The corresponding range of phases in
this frequency range is called the phase margin. The corresponding range of gain is called the gain margin. For satisfactory performance the phase margin should be between 30”
and 60” and the gain margin should be larger than 3 dB.
Based on the previous condition, Nyquist”“’ obtained
an alternative and equivalent way for stability: he made a
vs Re{ G ‘(w)} for w between --oo and
plot of Im{G’(o)}
+m; the result is a closed curve. According to the Nyquist
condition, the system will be unstable if the curve enclose
the point ( - 1 ,iO), and stable if does not enclose it. Though
this condition is easy for application, it does not mention
nothing about the stability region. In fact, the Nyquist condition informs whether a given setting is stable but does not
allow one to find out the stability region.
The loop stability can be studied by the properties of the
G(o) function. For that, we need to write this function as a
function of the Laplace operator s = iw; then if all the poles
of G(s) have real and negative parts, the system will be
considered stable.
Now we need to make a model for the voltage sensitivity
of the z-piezo, y(w), and to describe the values for the PI
control to obtain p(w).
Rev. Sci. Instrum., Vol. 66, No. 5, May 1995
(21)
Equation (22) holds for a piezo without resonance and with
G2=0.
We can easily demonstrate the stability condition writing
the last expression (22) of G(w) as a s function (for G,=O).
This is
G(s)=
K&o
K,Go+s’
which has only one negative pole s1 = -K, G,<O, and then
it is stable.
Another way to understand the same problem is considering G(o) as the response of a first-order low-pass filter
with cutoff frequency w,=KIGo=26
700 s-l (f,=4.25
kHz).
In this simple example we can increase the bandwidth
without problems by increasing the Go or K, value. From
this, we can achieve G(w) = 1 in all sampling bands of V, ,
and considering Eq. (17),
V,,,-h,,
we will have the desirable situation: the measured value V,
reproduces without distortions the sample topography h, at
all sampling velocities.
B. Realistic
model
for
piezo
The weak point in the previous model for the piezo was
to consider the z-piezo frequency independent. A more realistic situation is to assume that the tripod system (z-piezo
and x-y scanner), which moves the tip mechanically, presents a group of resonances called the system’s resonance
frequencies. Among these mechanical frequencies, only the
lowest is of interest in our case because is the most difficult
to damp and will limit the bandwidth as we will see later.
Then, a more realistic expression for the voltage sensitivity
of the z-piezo is
YO
y(o)=
1f’
where the expression
STM feedback
3199
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
TABLE I. Parameters that yield unstable conditions
K,=l
V
f&=4 eV
a=Q.89 VIA
A=5
G,=O.l
y,=300 A/v
G,,=133.5
K,=200 s-’
(1 + ion- 02/wi) represents a resonance-similar
to the
RCL electric circuit or to a damping oscillator-with
3 as
the resonance frequency and r the time constant related to
the damping. In our case w, is related to the lowest mechanical resonance, and the parameter 7, the relaxation time, is
related to the width and height of the resonance peak. With
this model for ‘y, the system will present instabilities because
there exists a loop component, y, with two poles.
With this definition for y(o), keeping expression (21) for
Go and for the particular case where p includes only an
integrator, we can rewrite Eqs. (16) and (18) as
G(w)=
K,Go( 1 + ionK,Go+ io( 1 + ioT-
02/wi)
02/&)
’
-270 . ‘...,..’ . . ‘....a . .-.-.a
‘.i...
IO0
101
102
103
104
(24)
G’(w)=
Frequency (Hz)
&Go
io( 1 +iwr-
02/w$ ’
By using the particular values oo=31 416 s-l cfo=5
kHz) and r=5 w and the control parameters that are shown
in Table I, we learn that the system will have an unstable
behavior as can be demonstrated if we draw the Nyquist
diagram. If we try to obtain a tunnel current in this condition
it is clear that the resulting signal will have spontaneous
oscillations and it will be impossible to obtain stability.
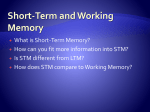
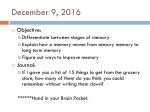
We can show the unstable conditions in other ways. Figure 2 represents the Bode diagram: logarithm of the amplitude [Fig. 2(a)] and phase [Fig. 2(b)] versus logarithm of the
(continuous line) and
frequency, (f= w/27r) for G’(o)
G(o) (dashed line), i.e., for open- and closed-loop conditions, respectively. In this diagram we have used the group of
parameters showed in Table I (G2=0). Here, G’(o) has a
phase of - 180” on the peak of resonance and the system will
be unstable because gain is always greater than 1 before the
resonant frequencies, in agreement with the criteria exposed
before.
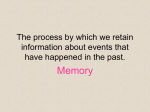
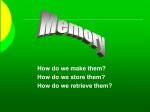
Figure 3 shows a case for stable conditions. Using the
same values for w and 7 as in Fig. 2 and the parameters of
Table II, we obtained the stable condition. Figure 3(a) shows
the Bode diagram for G’(w) (continuous line) and G(o)
(dashed line) and we can apply the phase-amplitude criterion
near f. for cornprobation. Moreover, the Nyquist diagram
[Fig. 3(b)] shows that the curve does not contain the
(- 1,iO) point and then it is stable.
Thus far we have shown that for particular conditions we
can say whether or not the system is stable. Thus up to this
point we have not gone further than previous works. How
can we generalize our results, i.e., how can we design and
3200
Rev. Sci. Instrum.,
Vol. 66, No. 5, May 1995
FIG. 2. Bode’s diagram for G(o) and G’(o) with the data of Table I and
the parameters q,=31416 s-’ (fo=5 kHz) and ~5 p. Note the unstable
conditions with the parameters used (G2=0).
use our feedback control system in order to avoid the instabilities produced by the resonance of the mechanical component?
We first obtain a new expression for G( 0) for a real and
general case by substituting j?(w) and $u), and including
G2:
G(o)=
G,P( 0)
1 +AG,@(w)Y(o)
=[Go( ;-G2)]
/[
I+,,(
2-2)
X
(25)
Defining
Go
M(w)= (1-&.@+&2’
G’(o)=M(o)(
$-G2][
(l-
(27)
$1 -iwT].
In this situation the imaginary and real parts are
STM feedback
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
TABLE II. Group of parameters used in the model to obtain stable conditions in the feedback system.
KL=l V
f$=4 eV
a=O.89 V/z&
A=1
G,=O.l
y,=3oo&v
G,=26.7
K,= 150 s-l
For the stable condition, we need the curves formed by
the real and imaginary part in the Nyquist diagram to enclose
the point ( - 1 ,iO). Thus fulfilling this condition and making
Im{G’(w)}=O,
we obtain
This equation can be written in the usual form corresponding to a damped harmonic oscillator as
02=&l-&,
(30)
where 5 is the damping factor of the signal when a sudden
change occurs. We have made the assignation
(l-52>=
Frequency (Hz)
KI
KI+G2m$
(31)
Then, the real part needs to obey the condition
rl,O
K,d-G212
p+(1-12)&y
Im G’
1
<19
(32)
with Go, the total gain of the closed loop, as given by Eq.
cm
V. DISCUSSION
Re
Equation (29) shows that the integral K, and the proportional G, rule the delay of the control response and it is
related to the damping factor 5 during signal transitory.
Obtaining the damping factor 5 from Eq. (31),
(33)
Equation (32) give us the stability conditions. Special
cases of this expression are:
V-4
FIG. 3. (a) Bode’s diagram for G(w) and G’(w) with the data of Table II
and the parameters %=31416 SC’ (f0=5 kHz) and ~5 p. (b) Nyquist
diagram for this case. Note the stable conditions with the parameters used
(G,=O).
Re{G’(w)}=-M(o)
Im{G’(o)}=
- M;’
-
[ Gz ( l-
$)+KI+
[Kl(1-$)-w2~G2].
(28)
6)
If G,=O, then, from Eqs. (30) and (31), l=O and
o=wo. Then Eq. (32) becomes the following:
(ii)
G&I
-Tp
If K,=O
and
G,G,<l.
(without integral control), then {=l,
o=O,
Figure 4 shows the Bode [Fig. 4(a)] and Nyquist [Fig.
4(b)] diagrams for the parameters given in Table II except
that K,=30 s-l and G2 = 0.02 and the same values for w
and 7. The system is stable because for a phase of -180” in
STM feedback
3201
Rev. Sci. Instrum., Vol. 66, No. 5, May 1995
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
KI (s-?
FIG. 5. Curves that show the stability boundaries for our STM and electronics design. The stable regions for good imaging are those below the
lines. Each curve was obtained for differents values selected for Go (i.e., A,
G, , a, and yoyo).
-270'
IO0
'.'.".I
10'
3
"*.,..' , .",,'.I
. .:.LIO3
IO2
104
Frequency (Hz)
4
ImG
case the system is stable and will have a good performance
but the bandwidth is very narrow: about lOXnarrower than it
could be.
Using this method for feedback analysis, we can characterize each STM in order to obtain the regions of stability
from Eq. (32). Figure 5 shows lines of constant Go values as
function of G2 and K[. For a given Go the region of
{G, ,K,} values that is above the line corresponds to unstable
behavior and the region below is the stable one. The curves
in this figure correspond to one of our STMs that has a resonance frequency of 2.7 kHz. From Fig. 5, we can chose a
group of values for stability. Each STM design and each
electronics design needs to obtain its own curves for stability.
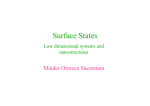
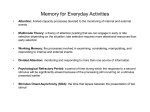
In Fig. 6(a) a topographic image obtained from the surface of a CdTe:In thin film when the system is in clear stability conditions is shown. If the same region is scanned
again but under unstable conditions, the image shown in Fig.
6(b) is obtained. It is clear that in the second case the overall
information obtained from the surface has changed and that
04
FIG. 4. (a) Bode’s diagram for G(o) and G’(o) with the data of Table
II-but K,=30 s-t-and the same parameters of resonance as Fig. 3. (b)
Respective Nyquist diagram. In this case the system shows a stable behavior
(G,=0.02).
G ‘( 0) the absolute gain or modulus IG’( o)l is lower than
1. From this figure we can see that the margins are 55” for
the phase and 3.1 dB for the gain. Then the system will have
a good performance. We then obtain a bandwidth of 200 Hz,
i.e., the cutoff frequency is about 425, very far away from
the criteria given in Pohl’s work13 of 0=43.
Thus in this
3202
Rev. Sci. Instrum.,
Vol. 66, No. 5, May 1995
(4
(b)
FIG. 6. Topographic image obtained from the surface of a CdTe:In thin film
when the system is in (a) clear stability conditions and (b) unstable conditions (1,=0.9 nA, V,=50 mV).
STM feedback
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp
undulations or ripples appear everywhere in the image. This
second image shows that the problem of working in unstable
conditions is not the impossibility of obtaining a surface image or large oscillations of the tunnel gap. Unstable conditions can be very tricky: in fact, an image can be obtained, as
in the example shown in Fig. 6(b), but it has no relationship
with the actual topography. Thus if the stable region of an
STM is unknown, then the obtained images are unreliable.
Thus the ignorance of the stability region explains the
astonishing fact that commercial STMs never include with
the documentation a graph with the stability region. Only a
mention of the best setting or range of settings for good
performance is given. The STM user should guess or find out
a good setting when-for experimental reasons-the recommended setting cannot be used. However, as we have shown,
the attainment of a coherent image does not imply that the
image represents the actual or “true” surface topography.
The knowledge of the role of every parameter involved
in the feedback control allows one to work the STM in reliable conditions. In this work we developed a theoretical
mode1 to analyze the combined effect of the parameters used
in the control with the mechanical properties of the STM. We
discuss the useful limits obtained from the analysis done and
the most common problems during operation. It is important
to remember that when the resonance peak is damped, the
available bandwidth diminishes for measurements as the result showed. Then a compromise between stability and scan
speed should be reached. In conclusion, a good characterization of the STM employed is necessary in order to obtain
reliable images.
We have been able to obtain the stability region of an
STM analytically, using all the possible elements in the feed-
back loop and without using simplifications or rare models
for the system. We have use the mathematical models for
each element of the loop and we have solved the problem
using control theory.
At this moment, we should point out that to use our
model in actual STMs, the characteristics of each element in
the loop need to be perfectly known.
ACKNOWLEDGMENTS
This work was possible by the support of the International Cooperation between CONACyT (Mexico) and CSIC
(Spain). Partial economic support from Spanish Fundacion
Ram&r Areces and CICYT (Grant No. MAT92-0492) is also
acknowledged.
‘G. Binnig and H. Rohrer, Lex Prix Nobel en 1986, The Nobel Foundations, 1987.
‘See, e.g., R. C. Dorf, Modern Control .Systems(Addison-Wesley, Reading,
MA, 1983).
3S. Park and C. F. Quate, Rev. Sci. Instrum. 58, 2004 (1987).
4Y. Kuk and P. J. Silverman, Rev. Sci. Instrum. 60, 165 (1989).
‘D. Jeon and R. F. Willis, Rev. Sci. Instrum. 62, 1650 (1991).
6A. Hammiche, Y. Wei, I. H. Wilson, and R. P. Webb, Rev. Sci. Instrum. 62,
3010 (1991).
7G. Ping and M. A. Player, Meas. Sci. Technol. 4, 677 (1993).
‘Methods of Experimental Physics: Scanning Tunneling Microscope, edited
by J. A. Stroncio and W. J. Kaiser (Academic, New York, 1993), Vol. 27.
9G. Binnig, H. Rohrer, G. Gerber, and E. Weibel, Appl. Phys. Lett. 40, 178
(1982).
“Millman and Halkias, Integrated Electronics (Mc-Graw Hill, New York,
1972).
” H. W. Bode, Network Analysis and Feedback Amplifier Design (van Nostrand, New York, 1956).
“H. Nyquist, Bell Syst. Tech. J. 11, 126 (1932).
13D. Pohl, IBM J. Res. Dev. 30, 417 (1986).
Rev. Sci. Instrum., Vol. 66, No. 5, May 1995
STM feedback
3203
Downloaded 26 Oct 2006 to 148.247.195.130. Redistribution subject to AIP license or copyright, see http://rsi.aip.org/rsi/copyright.jsp