Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
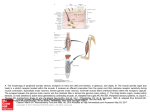
Action: What’s the Problem? CLPS1500 Ecological Approach to Perception and Action Prof. William Warren Why Action? Information (flow)! Laws of! Ecological! Optics! Environment! Laws of! Control! Agent! action (F)! ! The function of perception is to control action ! To understand how perception can control action, must understand how action is organized ! ! Coordination: organization among parts of action system Control: regulation of action system for a task goal What’s the Problem? ! Not obvious -- we take movement for granted. But we still can’t program a robot to walk down the street ! ! Coordination: How walk down the street and chew bubblegum at the same time? Control: How walk fast, step on a crack, avoid an obstacle? ! Nikolai Bernstein (1896-1966) ! Russian physiologist ! Translated in 1967, large influence in West since 1980s (Turvey, 1977) ! Bernstein’s problems 1. Degrees-of-freedom problem 2. Context-conditioned variability problem 1. The DF Problem The Centipede was happy, quite Until the Toad in fun Said, “Pray which leg goes after which?” And worked her mind to such a pitch, She lay distracted in the ditch Considering how to run. -- Mrs. Edmund Craster, c. 1870 ! How control a system of many moving parts? ! Central executive can’t control them independently. The Degrees-of-Freedom Problem ! How many people did it take to run ET? ! Marionette (13 joints) ! Imagine trying to make it do a pirouette ! How control a system of many df? ! df = Number of values required to specify the state of the system (positions of all joints) ! If each joint is controlled independently, computational burden too great for central executive ! ! ET required 10 central executives! In biological systems, df are not controlled independently ! Related to redundancy problem (motor equivalence): ! Same goal can be achieved by different movements ! Too many df. How constrain them to yield a unique movement? DF of Human Body ! 75 joints à 100 mechanical df ! 792 muscles à motor df ! >100,000 motor units à neural df ! An NP-complete problem: computational burden increases exponentially with number of df ! interactions (a) Joints and (b) Muscles Hinge Joints! • 1 df: knee, elbow • ≥ 2 muscles • flexor/extensor • agonist/antagonist Ball & Socket Joints! • 3 df: shoulder, hip • Multiple muscles: prime mover, synergists Biceps! Brachialis! Triceps! (c) Motor Units <--Afferents (dorsal root)! IA! IB! α Golgi tendon organ! muscle spindles! Intrafusal! Efferents--> ! Golgi tendon organ ! IB afferent fires if force on tendon ! γ-motoneuron ! sets sensitivity of muscle spindle (ventral root)! Spinal column! ! α-motoneuron ! contracts muscle ! Muscle spindle ! IA afferent fires if stretched extrafusal! γ ! Motor Unit (100s per muscle) ! α-motoneuron ! and innervated muscle fibers Muscle! ! Stretch reflex: system keeps muscle length constant with varying load ! Change muscle length by coactivation of α and γ mn Bernstein’s Solution: Synergies head R arm R leg x1 ! How control a system with many df? ! functionally couple df in low-level “automatisms” L arm L leg x2 ! Synergies, coordinative structures ! Equation of constraint (function over df) ! Reduces the effective df that must be controlled ! But where do the linkages (the organization) come from? y = f ( x1, x 2 ,...x n ) xn control! € coordination! Locomotor Automatism (Brown, 1911; Shik & Orlovskii, 1965) ! Decerebrate (“spinal”) cat ! Exhibits normal gait ! Alternate firing of flexors & extensors ! Tonic stimulation of brain stem --> increased speed, gait transitions ! Gait organized at the spinal level ! ! Spinal “rhythm generator” (Brown) General speed control parameter Remote Compensation (Gracco & Abs, 1985) ! Hallmark of a synergy ! df coupled to achieve functional goal ! Perturb lower lip while saying “aba” ! See adaptive compensation in upper lip (EMG ~50 ms) ! Preserves goal of lip closure Where does the organization in behavior come from? ! Hyp 1: Central controller ! ! ! Organization assumed a priori, imposed on the musculature Action plan, motor program, neural pattern generator Prior knowledge! ! Hyp 2: Self-organized, emergent behavior ! ! Organization emerges a posteriori from processes of pattern formation Walk & chew bubblegum: entrainment between low-level automatisms 2. The Problem of Contextual Variability ! Indeterminacy ! No fixed relation between central command and resulting movement ! Depends on context ! Inverse problem: How determine the motor command for a desired movement? ! Equifinality ! Achieve functional goal despite varying context ! Sources of indeterminacy ! Anatomical, mechanical, physiological variability (a) Anatomical Variability ! The role of a particular muscle in producing a given movement depends on context Exercise: ! Lowering your arm ! Deltoid ! Lowering arm against a resistance ! Latissimus dorsi (b) Mechanical Variability ! The relation between muscle activity and the resulting movement depends on the current state of the limbs ! ! When arm is below horizontal, pectoralis major à flexor (forward) When arm is above horizontal, pectoralis major à extensor (backward) ! Non-muscular forces: gravity, inertia ! If arm is stationary, contract pectoralis major to start forward movement ! But if arm is moving backward, contract it to stop movement ! Each movement alters the initial conditions for the next movement (c) Physiological Variability ! The relation between a cortical “command” and the resulting movement depends on the state of the spinal interneuron pool ! e.g. Tonic stimulation of brain stem ! ! Effect depends on spinal organization Speed parameter for locomotor automatism Bernstein’s Solution: Synergies again ! Low-level automatisms automatically adjust for varying conditions, at the spinal level ! Motor system takes advantage of non-muscular forces ! Thelen: infant kicking ! Learn to reduce active muscle contribution to movement Locomotor Automatism: Context Sensitivity ! Spinal rhythm generator is modified by sensory fb ! ! swing à flex stance à extend Extensors tonically active Flexors (swing) initiated by sensing full leg extension & leg unloading ! Phase-dependent reflex reversal ! Touch paw during stance --> extend ! Touch paw during swing --> flex Job Description for a Coordinative Structure df: Functionally couple df to yield stable coordination patterns ! Equifinality: Converge on goal from various initial conditions ! Motor equivalence: Family of movements all achieve goal ! Contextual variability: Automatically adapt to varying conditions ! ! What sort of system can do this??