Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Journal of Plankton Research Vol.20 no.9 pp.1837-1845, 1998
SHORT COMMUNICATION
Chaos and closure terms in plankton food chain models
Hal Caswell and Michael G.Neubert
Biology Department, MS #34, Woods Hole Oceanographic Institution,
Woods Hole, MA 02543-1049, USA
Abstract 'Closure terms' describe the mortality of top predators in plankton food chain models. Here
we present a counter-example to the conjecture that non-linear closure terms eliminate limit cycles
and chaos in food chain models.
Models of plankton food chains [see Steele and Henderson (1981), Evans and
Parslow (1985), Wroblewski et al. (1988) and Fasham et al. (1990) for typical
examples] are usually assembled from three components: (i) source terms that
describe the input of nutrients or the dynamics of basal species, which do not feed
on other species in the chain; (ii) consumption terms that link consumers and their
resources within the chain; (iii) terms describing the mortality of top predators,
which are not fed upon by other species in the chain. Because part of the mortality of top predators may result from higher-order predators that are not explicitly
included in the model, these last terms are called 'closure terms', acknowledging
their role in truncating the food web (Steele and Henderson, 1992,1995; Totterdell, 1993). At the end of this note, we discuss the legitimacy of using closure
terms in this way as a substitute for higher trophic levels; suffice it to say here that
it is, in fact, commonly done.
The dynamics of a food chain model depend on the forms of the source,
consumption and closure terms, and on their parameter values. These dynamics
may be complex. Even in the simplest food chain models—two-species predator-prey interactions—the system may exhibit one or more stable equilibria or
undergo a bifurcation (the so-called Hopf bifurcation) to a limit cycle. These limit
cycles occur in a wide variety of different models (Kolmogorov, 1936; Rosenzweig
and MacArthur, 1963; Rosenzweig, 1971; May, 1973). Models with more than two
dimensions can produce chaotic dynamics, whether the additional dimensions
result from additional species (Gilpin, 1979; Hastings and Powell, 1991), seasonal
forcing (Kot et al., 1992; Rinaldi et al., 1993), age structure (Nisbet and Gurney,
1985) or spatial structure (Pascual, 1993). As is now well known, chaotic dynamics are characterized by irregular, aperiodicfluctuationsand sensitive dependence
on initial conditions, so that there are limits to long-term predictability, even if
the system is modeled correctly.
Most food chain models include only density-independent mortality of the top
predator (Totterdell, 1993), so the closure term itself is proportional to population
density. If the closure term does reflect, at least in part, the action of higher-order
predators, then the functional or numerical responses of those predators might
produce density-dependent mortality of the top predator, and thus a non-linear
© Oxford University Press
1837
H.Caswen and MGJVeubert
closure term. In an important series of papers, Steele and Henderson (1981,1992,
1995) have suggested that non-linear closure terms stabilize plankton food web
models, eliminating or greatly reducing the possibility of limit cycles or chaotic
dynamics.
If this claim were true, chaos in food chain models (e.g. Gilpin, 1979; Hastings
and Powell, 1991; Schefer, 1991) might be an artifact of density-independent
closure terms, and chaos would be relevant to planktonic ecosystems only to the
extent that the mortality of top predators could be shown to be density independent.
There has been relatively little analysis of the effects of non-linear closure (but
see Gilpin, 1975; Bazykin etal., 1981; Hainzl, 1988,1992; Edwards and Brindley,
1996; Popova et al., 1997). In this note, we present a counter-example to Steele
and Henderson's hypothesis. We take a simple, well-studied, three-species food
chain model that is known to produce chaos and modify the closure term to
include density-dependent mortality. We find that shifting mortality from
completely density independent to completely density dependent does not eliminate periodic or chaotic dynamics. In making such comparisons, it is important
to avoid confusing changes in density dependence with changes in total mortality, and we show how to do so.
As a counter-example, our results are only intended to show that non-linear
closure does not automatically eliminate chaos. They are not intended to characterize completely the effects of non-linear closure in this model or in plankton
models generally. Nor does it matter that the model does not describe in detail any
specific plankton food chain. One interpretation of our results is that studies of
any specific food chain must explicitly examine the effects of non-linear closure;
you cannot assume that it will eliminate, or even reduce, oscillations or chaos.
The model we will analyze (Hastings and Powell, 1991) describes the rates of
change of the densities of a basal species (X), its predator (Y) and a top predator (Z):
X
K
}
It includes logistic growth of the basal species, and Type II functional responses
(Holling, 1959) for the two predators. In a typical example, X, Y and Z might
represent the population densities of phytoplankton, herbivorous zooplankton
and carnivorous zooplankton, respectively (Scheffer, 1991). The parameters are:
R, the intrinsic growth rate of the basal species; K, its carrying capacity; C, and
C2, the conversion rates of prey to predators; Ah the maximum predation rates
1838
Chaos and closure terms in food chain models
per unit prey; Bh the prey population size at which predation rates per unit prey
are one-half their maximum value; and D\, the density-independent per capita
mortality rate of the intermediate predator.
The closure term in model (1) is Af2(Z)Z. Af2(Z) is the per capita mortality rate,
or hazard. Steele and Henderson (1981,1992,1995) have suggested writing
M2(Z) = E2Za\
a2 > 0
(2)
to incorporate the numerical and functional responses of higher-order predators
to the density of their prey. Linear closure corresponds to density-independent
mortality and the special case a 2 = 0. Non-linear closure corresponds to densitydependent mortality and, with 0 < ot2 < 1, would approximate the effects of a Type
II functional response of the higher-order predators.
A per capita mortality rate of the form (2) can be criticized because it permits
no intermediate situations between the extremes of complete density independence (when ot2 = 0) and complete density dependence (when a2 > 0, no matter
how slightly). Complete density dependence implies that per capita mortality of
the top predator vanishes as population density goes to zero. In reality, however,
organisms are at risk of mortality due to a variety of factors, some of which are
density dependent and some of which are not. To completely eliminate densityindependent mortality is as biologically unrealistic as eliminating density-dependent mortality.
If the hazards of density-independent and density-dependent mortality are
independent, the total hazard is given by their sum (Cox and Oakes, 1984). Thus,
we propose as a closure term:
M2(Z)Z = (D2 + E2Za')Z
(3)
where D2 is the density-independent hazard and E2Za* is the density-dependent
hazard (see also Gilpin, 1975; Bazykin et al., 1981; Gatto, 1991).
By varying D2 and £ 2 , it is possible to change the per capita mortality from
completely density independent (£ 2 = 0) to completely density dependent (D2 =
0). Varying a 2 changes the dependence of mortality on density from decelerating
(0 < ot2 < 1) to linear (a 2 = 1) to accelerating (a 2 > 1). The linear case corresponds
to a Type I functional response of the higher-order predators, and the decelerating case crudely approximates a Type II functional response. The accelerating
case does not correspond to any biologically reasonable response, and will not be
considered here.
Recasting equations (1) and (3) into dimensionless form significantly reduces
the number of parameters. Rescaling the variables and parameters using
x = X/K,
ax = (KAMRBi),
a2 = (C2A2K)/(CXRB2),
y = CXY/K,
z = CXZI{C2K)
K/Bu
dx = DXIR
62 = KI(CXB2\
d2 = D2IR
1839
HXasweU and M.GJSeubert
e2 = (E2/R)(C2K/Cl)°>,
t = RT
produces:
^
)
(4c)
with the rescaled closure term
^(z)z = (d2 + E2za>)z
(5)
We now consider the effects of density-dependent closure of the form (5) on
the dynamics of model (4). With linear closure (e2 = 0), model (4) exhibits a series
of period-doubling bifurcations, leading eventually to chaotic dynamics on a
strange attractor (Hastings and Powell, 1991). These chaotic dynamics have been
studied extensively (Scheffer, 1991; Muratori and Rinaldi, 1992; Klebanoff and
Hastings, 1994; McCann and Yodzis, 1995; Kuznetsov and Rinaldi, 1996). We
used the Hastings and Powell parameter values and explored the robustness of
this attractor to changes in the closure term u2(z)z by varying the parameters d2,
e2 and a2. Using a strictly linear closure term with e2 = 0 and d2 = 0.01, Hastings
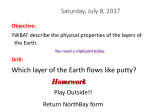
and Powell produced the attractor shown in Figure la. The rest of Figure 1 shows
how this asymptotic attractor changes as we reduce d2 and increase e2—from
complete density independence to complete density dependence. Clearly, shifting the allocation of mortality from density independent to density dependent
does not eliminate chaos or limit cycles.
Fig. L The Hastings-Powell atractor, with varying amounts of density-dependent and density-independent mortality in the top predator, (a) The trajectory analyzed by Hastings and Powell (1991),
with only linear closure, (b-d) The results of shifting mortality from density independent to density
dependent, with a 2 = 1. (e-g) are similar, but for a 2 = 0.5. Parameter values:
a =1
a = 0.5
62
(a)
(b)
(c)
(d)
2
1.0 X 105.0 x 10"3
2.5 X IO-3
0
0
5.325 X lfr-1
7.987 X 10-<
1.065 x 10-'
(a)
(e)
(f)
(g)
1.0 x 1O"2
5.0 X 1O"3
2.5 X 10"3
0
0
1.650 X 10"3
2.475 X 10"3
3.300 x 10-'
AU other parameters were fixed at a\ = 5.0, b\ = 3.0, d\ = 0.4, a2 = 0.1 and 6 2 = 2.0. In all cases, the
mortality rate of the top predator, averaged over the attractor, is approximately the same:
0.01.
1840
Chaos and closure terms in food chain models
In making these calculations, we were aware that changing d2 and e2 will, in
general, change the overall level of mortality of the top predator. Such a change
in overall mortality will affect the dynamics quite apart from its density dependence or lack thereof. To avoid this, we used (d2, t{) P a i r e that kept the long-term
average, <u2>, of the per capita mortality rate u2, fixed at the value 0.01 used in
the density-independent case. By calculating <U2> for a large number of (d2, £2)
1841
H.Caswell and M.GNeubert
pairs, we found that <u2> can be held constant by varying d2 and e2 along a line
in parameter space (Figure 2a and b). This allowed us to examine the results of
changing density dependence unconfounded by changes in total mortality.
The results in Figure 1 suggest a complex pattern of changes, from strange
attractors to limit cycles and back again, as the closure terms are varied. To characterize this pattern, we explored a section of the (d2, e2) parameter plane for
a 2 = 1 and a 2 = 0.5. For each of 128 x 128 combinations of d2 and e2, we classified the asymptotic behavior of the system as a stable equilibrium, a limit cycle,
or chaos. The classification was based on calculation of the dominant Lyapunov
exponent Xj (Wolf et al., 1985) of the trajectory. This exponent measures the
long-term average rate of divergence of nearby solutions; Xi < 0 indicates a stable
equilibrium, \x = 0 indicates a limit cycle and Xi > 0 indicates chaos. We used the
same initial condition ([*(0), y(0), z(0)] = [0.75, 0.15, 9.95]) for all parameter
values. For each parameter combination, we also computed the long-term
average mortality rate of the top predator, <u2>.
Figure 2 shows the results. When d2 and e2 are varied along lines of roughly
constant <u2> (moving from the lower right to upper left corner), chaos is robust
to non-linear closure terms. Increasing total mortality (moving from the lower
left to the upper right corner) tends to stabilize the system, whether the closure
is linear or not. The complex intermingling of chaotic and periodic dynamics in
the lower left corners of Figure 2c and d is to be expected; the bifurcation
diagrams of chaotic systems typically show such patterns as any parameter is
varied. We note that Figures 2a and c and 2b and d are qualitatively similar; there
is no significant effect of changing the response of the higher-order predators
from linear to decelerating. Finally, we note that models like (2) are known to
exhibit multiple attractors (Hastings and Powell, 1991; Abrams and Roth, 1994).
Thus, it is possible that different inital conditions would change the colors of some
of the pixels in Figure 2.
Non-linear closure terms do not automatically eliminate either limit cycles or
chaos in plankton food chain models. If the closure term is adjusted to keep the
average per capita mortality constant, mortality may be shifted between densityindependent and density-dependent components over a wide range without
changing the qualitative dynamics. Increasing total per capita mortality does tend
to stabilize the dynamics, but this is true regardless of whether the densitydependent or density-independent component is increased.
Our results here are specific to one food chain model, examined in the neighborhood of one (well-studied) set of parameters. They are counter-examples to
the conjecture that chaos in food chains is an artifact of linear closure. Non-linear
closure may stabilize some food chain models, but the effect is not automatic. Our
results do not completely characterize the role of closure terms in food chain
dynamics. That much larger question will require more extensive analysis of other
models, of closure terms based explicitly on the functional and numerical
responses of the higher-order predators, of the effects of forcing and of the effects
of density-dependent mortality at other trophic levels. We are undertaking such
investigations and will report them elsewhere.
The idea of 'closure' itself also warrants further study. Whether a trophic level
1842
Chaos and closure terms in food chain models
xllH
0.015
0.013
0.011
0.009
0.007
o
0.005
0.0
0.0050
0.0075
0.0100
0.0125
0.0
0.005
0.010
0.015
density independent mortality ( d2 )
Fig. 2. (a) The average per capita mortality rate of the top predator, <u2>, o f model (4, S) on a 128
X 128 grid in the (d2, e2) parameter plane. For each parameter pair, we set a2 = 1 and fixed the other
parameters in the model at the values used by Hastings and Powell (1991): aj = 5.0, b\ = 3.0, d\ - 0.4,
a2 = 0.1, bi = 2.0. We then integrated model (4, 5) from t = 0 to t = 5000 from the initial condition
[or(O),y(0), z(0)] = [0.75,0.15,9.95], to eliminate transient behavior. Finally, we integrated the system
for an addtional 15 000 time units and computed the average of u2 [cf. equation (5)] over the final
15 000 time units, (c) The dominant Lyapunov exponent. For each of the attractors computed in (a),
we also estimated the dominant Lyapunov exponent (X.]). A black pixel represents a positive exponent
(\] > 0.001) and implies chaotic dynamics for that pair of parameter values. A white pixel represents
a zero exponent (l\|l < 0.001) and implies either a periodic or quasi-periodic attractor. A negative
exponent (X| < -0.001), which implies a stable equilibrium, is represented by a gray pixel, (b, d) The
same as (a, c), respectively, but with ot2 = 1/2.
need be incorporated explicitly in a model, or can be implicitly described as a
parameter, usually depends on the time scales involved. If the higher-order
predators vary so slowly, compared to the rest of the food web, that their action
may be considered constant, then they can safely be described by a constant parameter. If they vary so rapidly, compared to the rest of the food web, that they
are always at their equilibrium value, then an expression for that equilibrium, as
a function of the rest of the food web, can be included in the model. There are
analytical methods that can be used to investigate these issues, but to our knowledge they have never been applied to plankton food chain models.
1843
tLCaswell and IVLONeubert
Acknowledgements
We thank Mercedes Pascual, John Steele, Bonnie Ripley, Mark Hill, Andy
Edwards and John Brindley for discussions and suggestions. The authors were
supported by the Office of Naval Research (N00014-92-J-1527). This is WHOI
contribution #9338.
References
Abrams,P.A. and RothJ.D. (1994) The effects of enrichment of three species food chains with
nonlinear functional responses. Ecology, 75,1118-1130.
Bazykin,A.D., BerezovskayaJ.S., Denisov.G.A. and Kuznetzov.Yu.A. (1981) The influence of
predator saturation effect and competition among predators on predator-prey system dynamics.
Ecol. Model., 14, 39-57.
Cox,D.R. and OakesJD. (1984) Analysis of Survival Data. Chapman and Hall, London.
Edwards.A.E. and BrindleyJ. (1996) Oscillatory behaviour in a three-component plankton population model. Dynam. StabiL Sys., 11,347-369.
Evans.G.T. and ParslowJ.S. (1985) A model of annual plankton cycles. BioL Oceanogr., 3, 327-347.
Fasham,MJ.R., DucklowJH.W. and McKelvie.S.M. (1990) A nitrogen-based model of plankton
dynamics in the oceanic mixed layer. /. Mar. Res., 48, 591-639.
Gatto,M. (1991) Some remarks on models of plankton densities in lakes. Am. Nat., 137,264-267.
Gilpin.M.E. (1975) Group Selection in Predator-Prey Communities. Princeton Unversity Press,
Princeton, NJ.
Gilpin,M.E. (1979) Spiral chaos in a predator-prey model. Am. Nat., 113, 306-308.
HainzI.J. (1988) Stability and Hopf bifurcation in a predator-prey system with several parameters.
SIAMJ. Appl. Math., 48,170-190.
HainzlJ. (1992) Multiparameter bifurcation of a predator-prey system. S1AM J. Math. Anal., 23,
150-180.
Hastings^, and Powell.T. (1991) Chaos in a three-species food chain. Ecology, 72,896-903.
Holling.C.S. (1959) The components of predation as revealed by a study of small mammal predation
of the European pine sawfly. Can. Entomol., 91,293-320.
Klebanoff A- and Hastings,A. (1994) Chaos in a three-species food chain. /. Math. BioL, 32,427-451.
Kot,M., Sayler.G.S. and Shultz,T.M. (1992) Complex dynamics in a model microbial system. Bull.
Math. BioL, 54,619-648.
Kolmogorov,A.N. (1936) Sulla teoria di Volterra della lotta per l'esistenza. G. Inst. ItaL Attuari., 7,
74-80.
Kuznetsov.Yu.A. and Rinaldi,S. (1996) Remarks on food chain dynamics. Math. Biosci., 134,1-34.
May,R.M. (1973) Stability and Complexity in Model Ecosystems. Princeton University Press,
Princeton, NJ.
McCann,K. and Yodzis,P. (1995) Bifurcation structure of a three-species food chain model. Theor.
Pop. BioL, 48, 93-125.
Muratori.S. and Rinaldi.S. (1992) Low- and high-frequency oscillations in three-dimensional food
chain systems. SIAMJ. Appl. Math., 52,1688-1706.
Nisbet,R.M. and Gumey.W.S.C. (1985) Fluctuation periodicity, generation separation and the expression of larval competition. Theor. Pop. BioL, 28,150-180.
Pascual.M. (1993) Diffusion-induced chaos in a spatial predator-prey system. Proc. R. Soc. London
Ser. B, 251,1-7.
PopovaJE.E., Fasham>IJ.R., OsipovA-V. and Ryabchenko.V.A. (1997) Chaotic behaviour of an
ocean ecosystem model under seasonal external forcing. /. Plankton Res., 19,1495-1515.
Rinaldi.S., Muratori.S. and Kuznetsov.Y. (1993) Multiple attractors, catastrophes and chaos in seasonally perturbed predator-prey communities. Bull Math. BioL, 55,15-35.
Rosenzweig,M.L. (1971) The paradox of enrichment. Science, 171,385-387.
Rosenzweig,M.L. and MacArthur,R.H. (1963) Graphical representation and stability conditions of
predator-prey interactions. Am. Nat., 97, 209-220.
Scheffer,M. (1991) Should we expect strange attractors behind plankton dynamics—and if so, should
we bother?/ Plankton Res., 13,1291-1305.
Steele,J.H. and HendersonJE.W. (1981) A simple plankton model. Am. Nat., 117, 676-691.
Steele J.H. and Henderson,E.W. (1992) The role of predation in plankton models. / Plankton Res.,
14,157-172.
1844
Chaos and closure terms in food chain models
SteeleJ.H. and Henderson^ .W. (1995) Predation control of plankton demography. ICESJ. Mar. ScL,
52,565-573.
TotterdelUJ. (1993) An annotated bibliography of marine biological models. In Evans.G.T. and
Fasham^IJ.R. (eds), Towards a Model of Ocean Biogeochemical Processes. Springer-Verlag,
Berlin, pp. 317-339.
Wolf,A., SwiftJ.B., SwinneyJi.L. and VastanoJ.A. (1985) Determining Lyapunov exponents from a
time series. Physica D, 16,285-317.
WroblewskiJ.S., SarmientoJ.L. and Flierl.G.R. (1988) An ocean basin scale model of plankton
dynamics in the North Atlantic. I. Solutions for the climatological oceanographic conditions in May.
Global Biogeochem. Cycles, 2,199-218.
Received on November 9, 1997; accepted on April 28,1998
1845