Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Alternating current wikipedia , lookup
Stray voltage wikipedia , lookup
Current source wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Mains electricity wikipedia , lookup
Voltage optimisation wikipedia , lookup
Buck converter wikipedia , lookup
Geophysical MASINT wikipedia , lookup
Distribution management system wikipedia , lookup
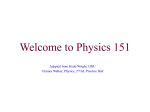
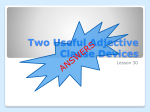
Modifying a Walker for Use in Rehabilitation of Spinal Cord Injuries ! Andy Blandino, Timothy Hoye, Brent Miller! Advisor: Dr. Nitin Sharma! Abstract! Walkers play an important role in the walking rehabilitation of a patient with a spinal cord injury (SCI). How much a SCI patient relies on his/her walker tells a lot about the state of his/her injury. Recording how much the patient relies on the walker and how far he/she can go using the walker allows rehabilitation progress to be tracked.! ! Introduction! There are approximately 270,000 people in the United States that currently suffer from spinal cord injury (SCI), with approximately 12,000 new cases each year1. This type of injury commonly leads to paraplegia, which greatly reduces the mobility of these patients2. This makes it very important to have effective an effective means of rehabilitating these people. Regaining strength and stabilization in leg and hip muscles is essential to rehabilitate walking in patients. The rehabilitation method that this project is intended for involves combining a walker, a knee-ankle-foot orthosis (KAFO), and functional electrical stimulation (FES).! ! Project Goals! The goal of this project is to track the progress of a SCI patient’s walking rehabilitation by modifying and adding sensors to the walker. The walker will be modified to accommodate a KAFO with hip motors. The sensors added will measure the downward force applied to the walker and the distance the walker travels. The walker will then be interfaced with Simulink.! ! Design! The first step in the design process was to decide what sensors were going to be needed to achieve the project goals. To find the applied force, the Flexforce A301 force sensor was chosen. To find the distance traveled, a Hall effect sensor was used.! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! ! Figure 1: Image of load cell (top left)3, image of Hall Effect sensor (bottom left)4, and summary of modifications made to walker (right)5.! ! The Flexforce sensor acts as a variable resistor; when there is a force applied there is a change in resistance. This results in a change in voltage, which is the output of the sensor. This voltage is very small, so an amplification circuit (Figure 1) is used to improve the signal range. This circuit was then made into a printed computer board (PCB) for aesthetic and simplicity purposes (Figure 2).! ! ! ! ! ! ! ! ! ! ! ! ! ! The Hall effect sensor is activated by 2 magnets that are mounted on the wheel. As a magnets passes near the sensor, a change in magnetic field is observed, resulting in a change in output voltage. This voltage drop is then converted to a count, where one count is half a revolution of the walker wheel. ! ! ! ! ! ! ! ! Figure 3: Multiple views of handle which houses load cells.! ! To house the force sensors, a 3D model was drawn in SolidWorks (Figure 3). This was built in 2 parts; the bottom fits around the walker frame and houses the force sensors, and the top has 2 cylinders that press down on the sensors only. This allows for a more exact calculation of the load applied because the load is only applied to the load cells. These handles were then printed using Stereolithography (SLA) and attached to the walker using a strong adhesive.! ! Simulink Interfacing! Interfacing with Simulink allows for simpler and cleaner outputs of the sensors. One single Simulink block diagram allowed for the outputs of the force sensors and the Hall effect sensor to be plotted in the same window. This makes it easier for the user to see real time data as the walker is being used.! ! ! ! ! ! ! ! ! ! ! Figure 4: Sample plots of Hall Effect Sensor data (left) and load cell data (right).! ! The plots from the figure above are representative plots of the data obtained using Simulink. In the plot on the left, the top plot shows the signal from the Hall Effect sensor and the bottom plot represents the relationship between these voltage increases and the distance traveled (plotted on the y-axis). The plot on the right shows the voltage output of a single load cell in simple loading and unloading of the handle. The increase in voltage relates linearly to the force being applied to the load cell. ! ! Conclusions! The force sensors measure the applied load by the user to the walker which can be interpreted as the user’s dependence on the walker. The Hall Effect sensor measures how far and how fast the walker travels. As dependence on the walker decreases and distance traveled increases, we can conclude that walking rehab is progressing positively. These sensors were successfully implemented and interfaced with Simulink, meeting all project goals.! ! Future Work! Future work will include better interfacing the KAFO and FES with the modified walker. Additionally, sensor readings can be refined to give additional information about the upper body position through the use of the difference in force on the load cells in the front and back of the handles.! ! Acknowledgements! Dr. Nitin Sharma, Nicholas Kirsch, and the Machine Shop! ! Sources! Figure 2: Amplification circuit diagram (left) and PCB design (right).! [1] https://www.nscisc.uab.edu/PublicDocuments/fact_figures_docs/Facts%202012%20Feb%20Final.pdf! [2] http://www.spineuniverse.com/conditions/spinal-cord-injury/spinal-cord-injury-sci-aftermath-diagnosis! [3] http://www.tekscan.com/store/media/catalog/product/cache/1/image/9df78eab33525d08d6e5fb8d27136e95/a/3/a301-sensor-thumbnail_3.jpg! [4] http://www.ictradenet.com/models_pic/480-TO-92.jpg! [5] http://amzn.com/B009OEB6EC!