Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Digital Comprehensive Summaries of Uppsala Dissertations
from the Faculty of Science and Technology 202
Electric Energy Conversion
Systems: Wave Energy and
Hydropower
KARIN THORBURN
ACTA
UNIVERSITATIS
UPSALIENSIS
UPPSALA
2006
ISSN 1651-6214
ISBN 91-554-6617-6
urn:nbn:se:uu:diva-7081
! "#$"% & & & '( ) * +(
) ,( !( + + - $ .
+ /*(
0
( ( %1 ( ( 234 1"5%%65!!"75!(
+ 8 & ( )* & *
*( ) *9 & & (
&& *
:; ( 0 * &
* &< ( ) &
&
* ( ) * * & ( )
* & &
( & * (
0
& & & ( 0 & 5
& += : &; * (
/* & ( )
& & "1 8 & &( * & * && * * (
>
*
* *
&
! " ! #$ %&'! !
"()%*+* ! ? ,
) !
24 "!%"5!"6
234 1"5%%65!!"75!
$$$$
57 @" :$AA(9(ABC$$$$
57 @";
To Stefan, the best supporter
List of Papers
This thesis is based on the following papers, which are referred to in the text
by their Roman numerals.
I
II
III
IV
V
VI
VII
VIII
IX
Leijon M., Danielsson O., Eriksson M., Thorburn K., Bernhoff
H., Isberg J., Sundberg J., Ivanova I., Sjöstedt E., Ågren O., Karlsson K.-E., and Wolfbrandt A. An electrical approach to wave energy conversion. Renewable Energy, 31(9), pp. 1309–1319, July
2006.
Danielsson O., Thorburn K., Sjöstedt E., and Leijon M.
Simulated response of a linear generator wave energy converter.
ISOPE’04, Toulon, France, 23–28 May, 2004.
Eriksson M., Thorburn K., Bernhoff H., and Leijon M. Dynamics of a linear generator for wave energy conversion. OMAE’04,
Vancouver, Canada, 20–25 June, 2004.
Thorburn K., Bernhoff H., and Leijon M. Wave energy transmission system concepts for linear generator arrays. Ocean Engineering, 31(11-12), pp 1339–1349, August 2004.
Thorburn K., Eriksson M., Karlsson K.-E., Wolfbrandt A., and
Leijon M. Time stepping finite element analysis of variable speed
synchronous generator with rectifier. Applied Energy, 83(4), pp.
371–386, April 2006.
Thorburn K. and Leijon M. Analytical and circuit simulations of
linear generators in farm. 2005/2006 IEEE PES Transmission &
Distribution, Dallas, USA, 21–24 May, 2006.
Thorburn K. and Leijon M. Farm size comparison with analytical model of linear generator wave energy converters. Accepted
for publication in Ocean Engineering, May, 2006.
Thorburn K. and Leijon M. Ideal analytical expression for linear generator flux at no load voltage. Conditionally accepted for
publication in Journal of Applied Physics, August, 2006.
Henfridsson U., Neimane V., Strand K., Kapper R., Bernhoff H.,
Danielsson O., Leijon M., Sundberg J., Thorburn K., Ericsson
E., and Bergman K. Wave energy potential in the Baltic Sea and
the Danish part of the North Sea, with reflections on the Skagerrak. Submitted to Renewable Energy, March, 2006.
5
X
XI
XII
Thorburn K., Nilsson K., Danielsson O., and Leijon M. Generators and electrical systems for direct drive energy conversion.
MAREC’06, London, UK, 6–10 March, 2006.
Thorburn K. and Leijon M. Case study of upgrading potential
for a small hydro power station. Renewable Energy, 30(7), pp.
1091–1099, June 2005.
Bolund B., Thorburn K., Sjöstedt E., Eriksson M., Segergren E.,
and Leijon M. Generator upgrade potential using new tools and
high voltage technology. Journal on Hydropower and Dams, Issue
Three, pp. 104–108, 2004.
The author has also contributed with minor inputs to the following conference
papers (not in appendix).
A
B
C
D
E
6
Danielsson O., Thorburn K., Sjöstedt E., Eriksson M., and Leijon M. Permanent magnet fixation concepts for linear generator. 5th EWTEC, Cork, Ireland, 17–20 September, 2003. Nonreviewed.
Bolund B., Segergren E., Solum A., Perers R., Lundström L.,
Lindblom A., Thorburn K., Eriksson M., Nilsson K., Ivanova I.,
Danielsson O., Eriksson S., Bengtsson H., Sjöstedt E., Isberg J.,
Sundberg J., Bernhoff H., Karlsson K.-E., Wolfbrandt A., Ågren
O., and Leijon M. Rotating and linear synchronous generators for
renewable electric energy conversion – an update of the ongoing
research projects at Uppsala University. NORPIE’04, Trondheim,
Norway, 14–16 June, 2004. Non-reviewed.
Danielsson O., Leijon M., Thorburn K., Eriksson M., and Bernhoff H. Dynamics of a linear generator for wave energy conversion. OMAE’05, Halkidiki, Greece, 12–17 June, 2005. Reviewed.
Gustafsson S., Svensson O., Sundberg J., Bernhoff H., Leijon M.,
Danielsson O., Eriksson M., Thorburn K., Strand K., Henfridsson U., Ericsson E., and Bergman K. Experiments at Islandsberg
on the west coast of Sweden in preparation of the construction of
a pilot wave power plant. 6th EWTEC, Glasgow, UK, 28 August
– 3 September, 2005. Non-reviewed.
Stålberg M., Waters R., Eriksson M., Danielsson O., Thorburn
K., Bernhoff H., and Leijon M. Full-Scale Testing of PM Linear
Generator for Point Absorber WEC. 6th EWTEC, Glasgow, UK,
28 August – 3 September, 2005. Non-reviewed.
Contents
1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Wave energy concepts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Hydropower . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Generator modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Field based models . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Circuit equivalent models . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Rectifier modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Analytical theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Fourier series expansion . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Simulated examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Wave energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Concept description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Force models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Cogging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Rectification of generator output . . . . . . . . . . . . . . . . . . . . . . .
3.5 Farm connections and transmission . . . . . . . . . . . . . . . . . . . . .
3.6 Experimental work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Hydropower upgrading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 High voltage generators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Small-scale hydropower . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Economical modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.4 Upgrading of Swedish hydropower . . . . . . . . . . . . . . . . . . . . .
5 Summary of papers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Linear generator wave energy converter . . . . . . . . . . . . . . . . . .
7.2 Hydropower upgrading . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Svensk sammanfattning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
15
16
19
19
19
20
22
23
25
26
35
35
36
37
37
37
38
39
39
40
40
40
41
45
49
49
49
51
53
Nomenclature and abbreviations
A
B
D
E
H
j
Bt
BG
c
C
e(t)
F0
Fb
Fem
Fes
Fs
g
hm
I, i(t)
k
L
m
n
p
AC
DC
FEM
HV
Tm
T
C/m2
V/m
A/m
A/m2
T
T
F
V
N
N
N
N
N
m/s2
m
A
N/m
H
kg
Magn. vector pot.
Magnetic field
Displacement field
Electric field
Magnetizing field
Free current dens.
Field in tooth
Airgap field
Cables per slot
Capacitance
EMF
Spring pre-tension
Buoy force
EM force
End stop force
Spring force
Gravity
Harm. amplitude
Current
Spring constant
Inductance
Mass
No of years
No of poles
Alternating Current
Direct Current
Finite Element Method
High Voltage
pkW
q
qc
r
R
V , v(t)
VG
WG
wp
wt
x
ẋ
D
Dm
T
O
/
P
U
Uc
Ur
V
)
:
EMF
OWC
PM
LV
e
C
%
:
V
m3
J
m
m
m
m/s
%
rad
rad
Wb-turns
e
Vs/Am
kg/m3
C/m3
:m
A/Vm
Wb
rad/s
Price per kW
Slots per pole
Total charge
Interest rate
Resistance
Voltage
Airgap volume
Airgap energy
Pole width
Tooth width
Transl. position
Transl. speed
Utilisation factor
Harm. phase shift
Electric angle
Flux linkage
Value of inst. kW
Permeability
Density
Charge density
Resistivity
Conductivity
Magnetic flux
Transl. ang. freq.
Electromotive force
Oscillating Water Column
Permanent Magnet
Low Voltage
The term rotor is used as a reference to a rotating machine, and translator
refers to a linear generator.
9
Preface
The division for Electricity and Lightning Research at the Ångstrom Laboratory in Uppsala has a good record within the lightning field. Since 2000, when
Mats Leijon was appointed as professor in Electricity, has the division also
developed within renewable energy research. Several fields are investigated;
wave energy, hydropower, wind power and energy conversion from water currents, as well as the related energy storage issue.
Professor Mats Leijon worked as a research leader within ABB, until 2001,
where an experimental approach was used. One way to succeed with research
is to build a prototype, based on thorough research and calculations, and test it
to verify the research. This approach has been adopted and a wave energy conversion prototype was successfully installed in March 2006. Similar projects
are pending for most of the other research areas.
The author was registered as a PhD student within wave energy in October
2002. Three PhD areas were formed then, with three students. Mikael Eriksson has been working mainly with the hydrodynamics and force interactions
of the buoy related to the wave energy converter and Oskar Danielsson has
focused on the generator; the stator, the translator and the electromagnetic
induction. The author’s field was defined as farm interconnection and power
transmission. A project regarding hydropower was run in parallel initially,
which resulted in two publications (paper XI and XII).
It has been increasingly clear over the years that all three wave energy areas
are vast, and could each be the scope of research for another dozen of PhD students (which will hopefully be the case). Several questions – perhaps obvious
depending on the reader’s background – rest therefore unanswered today.
A lot of theoretical and experimental work lies ahead, which is both annoying and exciting. Annoying, as each PhD student aims for the stars and sets
out to get it all done, and exciting as the project will go on and incorporate
more people and it will therefore develop in other ways than today’s plan.
11
"The sun’s rays shower as much energy on the earth’s surface in one
minute as the entire human race utilizes in one year. Despite the presence
of this bountiful and unusual flow of energy, a large part of the struggles
of the human race are concerned with acquiring and controlling sources
of power. Evidently our state of development in the utilization of power
is still rather crude."
(...)
"Some day the photochemical approach to energy utilization will either
be solved or definitely proved impracticable. In view of our own energy
resources it may seem foolish to start working on it now. But it may
not be too early to start. If we wait too long we may be caught short
as energy supplies dwindle. Moreover, many parts of the world already
suffer from insufficient energy. Many international problems might disappear if every group of people could fully utilize the energy falling on
its roof-tops."
Furnas, 1941 [1]
12
Acknowledgments
There are several people that I would like to thank for various reasons. First,
my supervisor Prof. Mats Leijon, who encouraged me to go back to the University after a couple of years in the industry, and with whom I have had several interesting discussions. Further, my assistant supervisor Dr. Arne Wolfbrandt has done a great job with the simulation environment with Dr. KarlErik Karlsson, and they are dedicated to explaining how it works.
All financiers, enabling our research, are given a warm thank you. Among
them, over the years, are: the Swedish Energy Agency (STEM), the Ångpanneföreningen Research Foundation, the J Gust Richert Research Foundation,
Draka Kabel AB, the Vargön Smältverk AB Foundation, the Gothenburg Energy AB Research Foundation, the Helge Ax-son Johnson Foundation, the CF
Environmental Research Foundation, Vattenfall AB and Uppsala University
Faculty of Natural Sciences and Technology. Since 2004 I was financed by
the Swedish Centre for Renewable Electric Energy Conversion (Centrum för
Förnybar Elenergiomvandling, CFE), which is funded by the Swedish Energy
Agency (Energimyndigheten) and the Swedish Governmental Agency for Innovation Systems (VINNOVA). I have been the secretary of CFE and would
like to thank the members of the steering committee for their interest and encouragement to our work.
Mrs. Gunnel Ivarsson, Mr. Ulf Ring and Mr. Thomas Götschl are gratefully acknowledged for their assistance with various problems; administrative,
practical and computer issues respectively. Further, I would like to express my
gratitude to all colleagues at Electricity and Lightning Research for interesting
discussions, and for helping me with proof reading.
Finally I would like to thank my family and my fiancé for their support and
inspiration.
13
1. Introduction
There are different types of energy in nature, and one type is the kinetic energy
that is related to natural movements. Water in motion can be converted into
another type of energy, electricity, which we use daily. The energy in moving
water in rivers can be converted with hydropower, and the water can be stored
as potential energy in dams. Ocean waves are induced by wind, and the energy
in waves can also be converted into electricity.
This thesis deals mainly with energy conversion from ocean waves, with
focus on the electric output and issues related to how this output can be transmitted to the electric grid. Some work relates to upgrading of hydropower by
substituting conventional generators for cable wound high voltage generators.
The focus of this thesis lies on the most recent work, as the earlier work was
presented also in a Licentiate Thesis in December 2004, [2].
1.1 Wave energy concepts
There has been several wave energy conversion projects in the world over
the years. One development period was in the late 1970’s, after the oil crisis.
Reviews of several of these concepts are found in [3] – [7]. The concepts
may be categorized in three groups – OWC, wave activated bodies (including
point absorbers) and overtopping devices – and those who cannot be placed in
any of these are grouped as not classified. These classifications were used in
the WaveNet report [8] and a schematic illustration of the three categories is
shown in Fig. 1.1, where also a point absorber is shown.
An OWC, or oscillating water column, extracts the energy via an air turbine.
A hollow pipe, or other structure, is placed in the waves and the wave will
press or suction the air through the turbine.
Wave activated bodies use the relative motion of the waves to drive a generator. Two bodies on the ocean surface can be connected with a joint, in which
hydraulic oil is pumped in response to the motion. Alternatively, a flap that
moves with the waves can be used. Point absorbers are buoys that are placed
on the ocean surface.
An overtopping device is a container, into which the waves spill water with
high potential energy. The water is led back into the ocean via a turbine similar
to a hydropower turbine.
The concept behind the work in this thesis is based on a point absorber and a
linear generator, [9] – [21]. A generator is placed on the seabed and its moving
15
(a) OWC
(b) Wave activated
(c) Overtopping
(d) Point absorber
Figure 1.1: Schematics of wave energy conversion types.
generator part, the translator, is connected to the buoy with a rope. Springs
between the translator and the generator foundation improve the generator
performance and end stops prevent the translator from separating from the
generator. Different aspects of this ocean wave energy conversion system are
presented in paper I-X, [19] – [28].
1.2 Hydropower
Two of the papers in this thesis, XI [29] and XII [30], deal with electrical
upgrading of old hydropower plants. This is a relatively small field within
renewable energy research, but can nevertheless contribute with a substantial
increase in power production, [31].
Several hydropower plants need revision in the near future as most of the
hydropower plants were built 30 – 50 years ago. If the overall efficiency of
a large plant (500 MVA) is increased by 1% we add 5 MVA to the power
production. The increase in energy production per annum is approximately 20
GWh. This figure can be compared with wind power where a new wind energy
converter can be rated at 2 MVA. If this converter has a utilization factor of
30 % (i.e. the plant runs at nominal speed 30 % of the hours per year), the
energy production amounts to 5 GWh. Such an electrical upgrading of a large
hydropower plant would hence correspond to a new installation of four large
wind energy converters.
A hydropower plant consists of several parts, of which the generator and
the electrical system constitutes a small part, see also Fig. 1.2.
16
Reservoir
Dam
Powerhouse
Transformer
Generator
Intake Control gates Penstock Turbine Outflow
Figure 1.2: Overview of hydroelectric power plant
The most visible part of the hydropower station is the dam. Dams are important structures and the planning work is crucial. All extremes must be accounted for as a failure would have devastating consequences. The dam is
one of the reasons why new installations of hydropower in Sweden (and most
other countries) is unlikely. The ecological impact is large. Both the flora and
fauna are affected as large areas are submerged into the water. It is also possible that animal habitats are disturbed during the construction work. Social
factors must also be taken into account. More than one million people must
leave their homes in China, as a result of the Three Gorges hydropower installation. The Three Gorges station is the largest in the world and it will deliver
approximately 18.2 GW, [32], when completed.
Watercourses guide the water through the hydropower plant. Above the turbine the water is led through a vertical pipe, and below the turbine the water
is directed to the downstream outlet. The downstream pipes can sometimes
be long, and even interconnect two upstream dams to one common outlet
river. The shape of the watercourses affects the hydrodynamic properties of
the system. An overall upgrading of a hydropower plant includes revision of
the watercourses to optimize the water flow through the turbine.
There are three main types of turbines, [33]; Kaplan, Francis and Pelton
turbines. The Pelton turbines are used for the highest heads (100 – 1800 m)
and Kaplan for the lowest (5 – 50 m). The Francis turbines are used in a wide
spectrum of head heights; from 20 m to 800 m.
The electrical generator is a fairly small part of the investment of a hydropower plant. And there have been few breakthroughs in generator design
since the first constructions a century ago. The rotor of the generator is placed
on the turbine shaft. Today the turbine and generator are placed vertically, but
in the early days the shaft was horizontal. The rotational speed is usually 100
– 300 rpm, and this speed determines the number of electrical poles.
17
2. Theory
2.1
Generator modelling
Two main tracks are detected within generator modelling today; the first is a
field approach and the second is based on the analytical Park transform, [34]
– [39]. These approaches are often used for different purposes.
Firstly, a model can be used to design a new device with correct physical properties. A method where field equations are solved in accordance with
physical correlations is probably the more appropriate here. It is possible to
use a circuit approach for new design also, but such models are normally simplified and non-linearities (such as magnetic saturation) will then not be taken
into account.
The second purpose of a model is to represent a generator, which has already been built, and which makes use of parameters obtained from shortcircuit and other tests. For this purpose a circuit equivalent model is probably
adequate.
The detailed finite element (FE) modelling of both hydropower generators
and linear wave energy generators, in the work behind this thesis, is based on
the same physical principles: the field equations.
2.1.1 Field based models
One way to describe a generator is to use the Maxwell’s equations for electromagnetic coupling and induction, Eqs. 2.1 – 2.4.
· D = Uc
(2.1)
·B = 0
(2.2)
wB
×E = −
wt
wD
×H = j+
wt
(2.3)
(2.4)
B is the magnetic flux density, D refers to the displacement field, E is the
electric field and H is the magnetizing field. On the right hand sides, Uc refers
to charge density and j is the free current density.
To obtain a field model of a generator, a magnetic circuit on a rotor is required. This magnetic circuit can originate from electromagnets (i.e. a rotor
with field windings) or permanent magnets mounted on the rotor. A stator
19
with stator windings is modelled outside the rotor. An alternating voltage is
induced in the stator, when the rotor moves in relation to the stator windings,
in accordance with Faraday’s law.
One approach to solve the field model numerically is to use a finite element
method, FEM. This method has been developed and has been presented in
literature, see e.g. [40] and [41], and refer to [42] for an overview.
A finite element calculation is initiated with a definition of a geometry.
For generators a two-dimensional geometry is most frequently chosen, with
a cross-section normal to the axis of rotation. An error is then introduced,
in which the losses in the end windings constitutes the main part. A circuit
can be added to the FEM model to compensate for the end windings, and the
modelling error by doing so is small compared with the difficulties associated
with a full three-dimensional simulation. Other external circuits can also be
coupled to the FE model, which are handled outside the FE environment, [43]
– [46].
The simulations of the generator are based on mathematical models of magnetic fields and there are three main model simplifications in the generator
model. Firstly the displacement field w D/w t has been neglected due to the low
(<100 Hz) frequencies. Secondly the magnetic field is solved for a two dimensional section of the translator and the stator. The last simplification concerns
the end effects of the stator windings, which are modelled as impedances in an
electric circuit. With these simplifications Maxwell’s equations can be combined into Eq. (2.5).
1
w Az
−·
V
Az = −V V
(2.5)
wt
P
This formulation is also used in, for example, [43]. V is the conductivity, Az
is the vertical component of the magnetic potential and P is the permeability.
The V on the right hand side is an applied voltage, which couples the external
circuits to the generator model.
FE simulations were used in simulations behind the results in paper I-III, V,
VIII, X–XII
2.1.2
Circuit equivalent models
A circuit equivalent of an electromagnetic object contains resistances, R, capacitances, C, inductances, L and sources for voltage, V , and current, I . The
configuration of these parameters is regulated in differential equation relations.
When a generator is modelled as circuit equivalents one generally assumes
that the generator rotor moves at a constant speed. Material parameters are
assumed to be linear (e.g. constant magnetic permeability, P ). Several circuit
elements can be identified and the degree of complexity of the model is determined by the need for detail in the model.
20
An example of a method for determination of parameters in lumped circuit
models, and of how electric circuits are coupled to mechanical circuits, is
found in [47]. An example of the process is found in [48].
The resistance, R, can be modelled simply as Ur l/Al , where Ur is resistivity,
l is length of the conductor and Al is the cross-sectional conductor area. Ideal
generalized equations for inductance and capacitance are described further as
follows, [47].
Inductance
The flux linkage, O , is defined as
O=
S
B · nda,
(2.6)
where the magnetic field B is integrated over the surface S. If a perfect conductor is assumed the terminal voltage, v, is obtained as
v=
dO
.
dt
(2.7)
O is a function of the induced current, i, and the position, x, of the moving
part (rotor or translator) of the system, i.e. O = O (i, x). Eq. 2.7 can therefore
be rewritten as
dO
w O di w O dx
v=
=
+
.
(2.8)
dt
w i dt w x dt
If it is assumed that the system is electrically linear, i.e. the flux linkage is
linear with the current, O becomes
O = L(x)i.
(2.9)
Eqs. 2.8 and 2.9 combined gives the terminal voltage as
v = L(x)
dL dx
di
+i
.
dt
dx dt
(2.10)
The inductance L is a function of rotor position, which is intuitively reasonable. Parameters such as saturation, stator slots, small variations in air gap
distance and other imperfections will affect the inductance of the machine.
Capacitance
A capacitance may be derived in analogy with the previous section. Starting
with the total charge qc on one of the equipotential bodies in the circuit, the
current can be written as
dq
.
(2.11)
dt
The charge, qc , depend on material properties, geometry and applied voltage, hence q = q(v, x) (where v and x may be functions of time). Therefore can
2.11 be expanded to
i=
21
dq w q dv w q dx
=
+
.
(2.12)
dt
w v dt w x dt
If it is assumed again that the system is electrically linear the charge can be
rewritten as
i=
q = C(x)v.
(2.13)
Eqs. 2.12 and 2.13 are combined into
i = C(x)
dC dx
dv
+v
.
dt
dx dt
(2.14)
The capacitance, C, depend on geometry.
2.2
Rectifier modelling
Rectifiers are used for electricity conversion, from AC to DC. Power semiconductor devices such as diodes and thyristors can be used for this purpose; the
most simple component is the diode.
A diode conducts when it is subjected to a voltage drop in the forward direction, and ideally the diode blocks the current when the voltage is reversed.
Two diodes are needed per phase to rectify, one diode is used for the positive and the other for the negative half period. For a full three-phase rectifier
bridge six diodes are mounted and the positive and negative direct current,
DC, leads are connected, respectively. See Fig. 2.1. A bipolar DC output is
thereby obtained, where the net voltage is Vdc+ +Vdc− .
+Vdc+
a1
b1
c1
a2
b2
c2
A
B
C
-VdcFigure 2.1: Six pulse diode rectifier connected to phase A, B and C
In the wave energy conversion concept used in the present work a rectifier
is needed to enable interconnection of several generating units in a farm. A
detailed description of the rectifier model used with the FEM simulations is
presented in paper V. The results obtained were compared with results from
rotating machine simulations, [49].
22
2.3
Analytical theory
The ocean wave energy source is irregular, and it is therefore not straightforward to predict the generator output without simulations. An ideal analytical
theory has therefore been developed, which may lead to deeper understanding,
or which can be developed further to serve as a tool for system design. Resonances and unwanted harmonics can be avoided if transmission equipment
(e.g. cables and filters) and power converters are designed properly, e.g. [50].
This theory evolves in paper VI–VIII.
Assume a linear translator where permanent magnets (PM’s) are mounted
with alternating polarity, [24, 25]. This translator is then moved vertically, see
Fig. 2.2 where a sinusoidal motion is illustrated. However, as the ocean waves
are irregular it is not realistic to expect that the translator moves sinusoidally.
Any continuous function can be described as an infinite Fourier series, which
means that several superimposed waves form an arbitrary motion pattern. An
example of this is found in Fig. 2.3. The terms "wave motion" and "wave
position" hereafter refer to the translator motion and position.
Translator with permanent magnets
Translator position
h
h
Time
Ω
0
Translator speed
wp
Ωh
-h
Time
Stator with cable windings
Figure 2.2: Cross section of linear generator. The translator with permanent magnets
moves sinusoidally in the most simple case.
The amplitudes associated with the harmonics are denoted hm and the fundamental angular frequency of the translator motion is :. Then the position
and speed of the translator, x and ẋ, can be written as:
f
x(t) =
¦ hm sin(m:t + Dm )
(2.15)
m=1
f
ẋ(t) = :
¦ mhm cos(m:t + Dm ).
(2.16)
m=1
: is the fundamental angular frequency of the translator motion based on the
wave period T , : = 2S /T and hm is the harmonic amplitude. The harmonic
index is m and the phase shift is Dm for each harmonic.
23
1.5
x(t)
Wave height [m]
1
h1
0.5
h2
h3
h5
h4
0
-0.5
-1
α5
α4
α1=α2=α3=0
0
1
2
3
Time [s]
4
5
6
Figure 2.3: Example of series expanded wave. The harmonic waves have frequencies
that are multiples of the fundamental frequency, and phase shifts are included.
If the pole pair width, w p , is defined as the distance from one north pole to
the next (see Fig. 2.2), then the electric angle T is
T (t) =
f
2S f
h
sin(m:t
+
D
)
=
m
¦ m
¦ bm sin(m:t + Dm ). (2.17)
w p m=1
m=1
A mathematical amplitude bm = 2S hm /w p is introduced here.
Assuming that the flux, ), lags the motion by angle G , the flux (a function
of T ) may be written as,
f
)(t) = )t cos(T + G ) = )t cos
¦ bm sin(m:t + Dm ) + G
(2.18)
m=1
where )t is approximated here by a constant describing the amplitude of the
total flux. The angle G is related to the load angle, i.e. how much the voltage
shifts during full load with respect to the no load voltage. From this point
onwards G is set to zero, which means that the no load case is considered, i.e.
where the voltage equals the electromotive force (EMF). The magnitude of
the flux, )t , is identified as
)t = Bt · wt · d
(2.19)
i.e. the product of Bt , the magnetic field in a tooth (obtained from numerical
finite element, FE, simulations)[16, 12, 40, 51], and the cross sectional area
through which the flux lines are guided (defined as the width of a stator tooth,
wt , times the width of the stator stack, d ). Further, p is the total number of
poles, q is the number of slots per pole and phase and c is the number of
cables in a slot, which gives the total number of turns, N as
N = p · q · c.
24
(2.20)
The last step is to derive Eq. (2.18) to obtain the EMF according to Faraday’s
law:
f
d)
e(t) = −N
= N)t ¦ m:bm cos(m:t + Dm ) ×
dt
m=1
f
¦ bm sin(m:t + Dm )
sin
.
(2.21)
m=1
The EMF expression in Eq. (2.21) may be used for numerical Fourier transforms to find the frequency contents. An alternative is to calculate the Fourier
series based on the wave fundamental :, as shown in the following section.
2.3.1 Fourier series expansion
The target for the following derivation is to write the flux in Eq. (2.18) as a
series expansion,
f
¦
)(t) =
An ein:t .
(2.22)
n=−f
A complete solution is presented in paper VIII, and is not duplicated here. The
results are highlighted, nevertheless. The solution to An is
f
f
An = )t
¦
eipm Dm Jpm (bm ) ,
(2.23)
pm =−f
m=1
with contributions that fulfils
f
f
¦ mpm = n
m=1
and
¦ pm = 2q.
(2.24)
m=1
Jpm (bm ) refers to Bessel functions, see e.g. [52].
This series expansion may be turned into a positive sum of cosines, where
the terms are calculated as
f
)(t) =
¦ Bn cos (n:t + En ),
(2.25)
n=0
where
Bn =
¦ Jp
∗ m=1
+
m
¦ Jp
2
f
¦ pm D m
(bm ) cos
+
m=1
f
(bm ) sin
f
¦ pm Dm
2 1/2
¦ Jpm (bm ) sin (¦ pm Dm )
= (S +) arctan
.
¦ Jpm (bm ) cos (¦ pm Dm )
∗ m=1
En
f
m
(2.26)
m=1
(2.27)
S is added if the arctan denominator is negative.
25
The asterisk (*) sum is defined in Eq. (2.24) and an offset is obtained for
n = 0, where E0 = 0 and
B0 =
f
¦ Jp
∗
(bm ) cos
f
¦ pm Dm
.
(2.28)
f
d)(t)
= −i:N)t ¦ nAn ein:t
dt
n=−f
(2.29)
m
m=1
m=1
Accordingly the EMF is derived as
e(t) = −N
f
= −: ¦ nBn sin (n:t + En )
(2.30)
n=1
where An , Bn and En are given by Eqs. (2.23), (2.26) and (2.27).
The harmonic content in the EMF for each multiple of the fundamental
wave frequency is thereby obtained directly from Eq. (2.30).
2.3.2 Simulated examples
Two simulated examples are used to illustrate the theory presented here. In
the first example an analytical simulation with a circuit is compared with a
dynamic finite element (FE) simulation. The second example shows how the
theoretical model can be used, and results from a range of simulations are
discussed.
FE simulation comparison
A linear test generator has been defined and simulation parameters were chosen to somewhat correspond to wave energy converters for Swedish waters. A
selection of generator parameters are presented in Table 2.1.
Parameter
Value in simulations
wt
wp
d
p
q
c
T
h
Bt
8 mm
100 mm
400 mm
100
6/5
6
5s
1m
1.53 T
Table 2.1: Parameters for example study.
26
Resistance
Inductance
R
L
i(t)
+
+
e(t)
Generator
v(t) Rload
Load
Figure 2.4: Circuit
Dynamic FE simulation
The generator was designed with a finite element calculation tool where the
generator voltage is used as a design target, which affects the machine length.
This design is done in a stationary mode, i.e. the translator is locked in space
relative the stator. The design process is usually iterated several times until the
most desired performance is obtained. Other geometric parameters are fixed,
as well as material properties. A range of generator parameters are found in
Table 2.1. The magnetic flux in the stator tooth, Bt , was obtained from a noload simulation, and is used for analytical calculations.
It is possible to simulate the generator in a dynamic mode, which has been
done for the designed generator. The generator windings has a resistance of
0.37 ohms per phase and an inductance of 11.5 mH at nominal speed (0.8 m/s)
and a resistive load of 3.1 ohms per phase was connected to the generator.
Analytical and circuit simulation
The data from Table 2.1 was inserted into Eq. 2.29 with m = 1 in An , Eq.
(2.23),(i.e. for a perfectly sinusoidal motion), which gives the ideal EMF for
the machine. That is, for a no-load case. To compare the results with the FE
calculations a load situation is formed by adding a resistive circuit to the EMF
model, see Fig. 2.4. There will be a voltage drop over the cable windings as
well as over the load, and a phase shift occurs due to the winding inductance.
The differential equation for the circuit with respect to the load voltage is
calculated as:
v(t) = e(t) − R · i(t) − L ·
di
dt
v(t) = Rload · i(t)
R
dv
Rload
+1
=
e(t) − v(t)
dt
L
Rload
(2.31)
(2.32)
(2.33)
The reactance is described with a differential equation here, rather than X =
Z L, as the frequency varies.
27
300
Voltage [V]
200
100
0
-100
-200
-300
0
0.2
0.4
0.6
0.8
Time [s]
1
1.2
1.4
Figure 2.5: Voltages from comparison simulation. The EMF from the analytical simulation has the highest amplitude (green), then the corresponding terminal voltage v(t)
(red), and the FE simulated load voltage (blue).
80
60
Current [A]
40
20
0
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
Time [s]
1
1.2
1.4
Figure 2.6: Currents, analytical (red) and FE simulated (blue).
EMF and load voltage are shown with the FE simulated voltage in Fig. 2.5.
The corresponding currents, powers and analytical flux are are found in Figs.
2.6, 2.7 and 2.8 respectively.
Interpretation of the simulation
The load voltages from the analytical and from the FE simulations are quite
similar, as are the corresponding currents. An offset in the power levels reveals
a discrepancy of some 4% for the time averages.
Three simulated waves
Height comparison
Another simulated example shows two waves, Fig. 2.9, the first with a height
of 25% of the second wave. The aim is to illustrate the harmonic content of the
28
30
Power [kW]
25
20
15
(Time averages,
~4% difference)
10
5
0
0
0.2
0.4
0.6
0.8
Time [s]
1
1.2
1.4
Figure 2.7: Powers, momentary and time averages, analytical (dashed) and FE simulated (solid).
4
Flux [mWb], speed [m/s]
3
2
1
0
-1
-2
-3
-4
0
0.2
0.4
0.6
0.8
Time [s]
1
1.2
1.4
Figure 2.8: An illustration of the flux )(t) (solid) in the analytical and circuit calculation, plotted with the translator speed (dashed).
magnetic flux and EMF as derived in the previous sections. The fundamental
frequency is :0 = 2S /5 rad/s, i.e. the period is T = 5s.
The waves illustrate the motion of the translator, and the corresponding
fluxes and voltages are found in Fig. 2.10.
One can identify that the highest EMF is obtained for the highest velocity,
i.e. for the larger wave when the slope is steepest (right before t = 5s). This
speed is never obtained for the smaller wave and the voltage is therefore more
modest. The flux patterns differ between the two waves for that same reason.
29
0.3
1
0.2
Wave height [m]
Wave height [m]
0.5
0.1
0
-0.1
0
-0.5
-0.2
-1
-0.3
-0.4
0
1
2
3
Time [s]
4
5
6
-1.5
0
1
(a) Small wave
2
3
Time [s]
4
5
6
(b) Large wave
5
5
4
4
3
3
2
2
Flux [mWb]
Flux [mWb]
Figure 2.9: Two waves, dashed are fundamental and dotted graphs are first harmonics (double fundamental frequency). Solid graphs show the sum, which is the wave.
hsmall = [0.225 0.05]m, hlarge = [0.9 0.2]m, D = [0 0.8]rad.
1
0
-1
1
0
-1
-2
-2
-3
-3
-4
-5
-4
0
1
2
3
Time [s]
4
5
-5
6
0
80
400
60
300
40
200
20
100
0
-100
-40
-200
-60
-300
0
1
2
3
Time [s]
4
(c) Small wave EMF
3
Time [s]
4
5
6
5
6
0
-20
-80
2
(b) Large wave flux
Voltage [V]
Voltage [V]
(a) Small wave flux
1
5
6
-400
0
1
2
3
Time [s]
4
(d) Large wave EMF
Figure 2.10: Flux and EMF for the waves in Fig. 2.9. There are two graphs in each
diagram with good overlap: dashed represents the ideal graph as per Eqs. (2.18) and
(2.21), and the solid graph shows the series expanded solutions, Eqs. (2.25) and (2.30).
30
2
14
1.8
12
Flux harmonic content [10-4 Wb]
Flux harmonic content [mWb]
1.6
1.4
1.2
1
0.8
0.6
0.4
10
8
6
4
2
0.2
0
0
-2
0
5
10
15
20
25
30
Multiples of Omega (n)
35
40
0
18
45
16
40
14
35
12
10
8
6
20
15
10
5
5
10
15
20
25
30
Multiples of Omega (n)
35
0
40
0
20
40
60
80
Multiples of Omega (n)
100
120
(d) EMF harmonics, large wave
2
2
1
1
Argument variation [rad]
Argument variation [rad]
(c) EMF harmonics, small wave
0
-1
-2
-3
-4
-5
120
25
2
0
100
30
4
0
40
60
80
Multiples of Omega (n)
(b) Flux harmonics, large wave
Emf harmonic content [V]
Emf harmonic content [V]
(a) Flux harmonics, small wave
20
0
-1
-2
-3
-4
0
5
10
15
20
25
30
Multiples of Omega (n)
(e) Argument, small wave
35
40
-5
0
20
40
60
80
Multiples of Omega (n)
100
120
(f) Argument, large wave
Figure 2.11: Harmonics, or rather, values of Bn , :nBn and En in Eqs. (2.25) – (2.30).
31
The peaks in the flux plots represent passages of north and south magnetic
poles in relation to one phase. Further, as the translator velocity is higher for
the larger wave, we will see higher harmonics present for flux and EMF for
the larger wave. See Fig. 2.11, where also the phase is plotted against the
multiples of the fundamental frequency.
Frequency comparison
In the final simulation two waves with identical harmonic amplitudes, but with
different fundamental frequencies (: = 2S /4 and : = 2S /5), have been compared. Illustrations are found in Fig. 2.12.
5
1
400
4
300
3
0.5
200
2
100
1
0
0
0
-1
-0.5
-100
-2
-200
-3
-1
-300
-4
-1.5
-5
0
1
2
3
Time (s)
4
5
0
6
1
2
3
Time (s)
4
5
6
1
(b) Fluxes, )i (t)
(a) Waves xi (t) and harmonics
2
3
Time (s)
4
5
6
100
120
25
30
(c) EMFs, ei (t)
14
2
-400
0
60
12
1
50
10
0
40
8
-1
6
30
-2
4
20
-3
2
-4
0
-5
-2
0
20
40
60
80
Multiples of Omega (n)
100
120
10
0
20
(d) Arguments Ei,n vs n
40
60
80
Multiples of Omega (n)
100
120
0
0
20
(e) )i,n vs n
60
80
Multiples of Omega (n)
(f) ei,n vs n
14
2
40
60
12
1
50
10
0
40
8
-1
6
30
-2
4
20
-3
2
-4
-5
10
0
-2
0
5
10
15
20
Frequency, Hz
25
(g) Ei,n vs frequency f (Hz)
30
0
5
10
15
20
Frequency, Hz
(h) )i,n vs f (Hz)
25
30
0
0
5
10
15
20
Frequency, Hz
(i) ei,n vs f (Hz)
Figure 2.12: Argument and harmonics for flux and EMF for waves with T=4 s (i =
1: red, black) and T=5 s (i = 2: blue, green). a) First (dashed) and second multiple
(dotted). d)-f) n refers to multiple.
32
Interpretation of the simulations
General peaks in flux and EMF appear for the same multiples of the fundamental frequency in the height comparison. The maximum peaks do not necessarily coincide with respect to harmonic number n, however, as the EMF is
scaled with n, see Eq. (2.30). A variation in wave height will affect the number
of harmonics so that higher amplitudes return higher numbers of harmonics.
The EMF is also scaled with the fundamental angular frequency, :, which
means that the exact graphs for the EMFs in Fig. 2.11 are valid for : =
2S /5 rad/s. Another fundamental frequency will scale the EMF amplitude,
and a scaling also occurs in the frequency domain (but the number of harmonics is the same), which is seen in the frequency variation example.
33
3. Wave energy
One reason why wave energy is of interest as a renewable energy source is
the potential, which has been estimated in paper IX to 56 TWh in the Baltic
Sea. A sample of real data from Ölands södra grund is found in paper II. The
energy content of waves in those waters is quite modest compared to e.g. the
Norwegian and Portuguese coasts. An often-used measure is the energy flux
[kW/m], which refers to the energy transported in each metre of wave front,
per second. The annual average in the Baltic is about 5 kW/m whereas the
figure can be as high as 100 kW/m in some areas, [53], [54].
The idea behind this wave energy research is to convert ocean wave energy
to electricity with a simple system of direct drive generating units in farms.
Today the solution comprises a buoy on the ocean surface connected by a rope
directly to the generator on the seabed. The generator is linear, which means
that the motion of the translator is up and down (in contrast to a conventional
generator with a rotating rotor). Linear generators are used in a few other wave
energy concepts, see e.g. [55] and [56].
A fundamental description of the research is found in paper I, where the
work is motivated with theory, simulations and experimental results.
3.1
Concept description
The system for energy conversion from ocean waves used in this thesis is
based on a point absorber and a linear generator, [57].
To broaden the understanding of the model, the linear generator system
used is briefly presented. A buoy on the ocean surface pulls a translator up by
a rope. Springs connecting the foundation (on the seabed) and the lower end
of the translator are also energized from the buoy. Surface mounted permanent
Neodymium Iron Boron (Nd2 Fe14 B) magnets, [10], on the translator induce a
voltage in the stator windings, which are positioned outside the translator. See
also [9], in which the system is described, and [21], where the power output
is investigated at different DC voltage levels.
The concept also includes transmission and grid integration and several
units can be interconnected to increase the total power output, [22]. In Fig.
3.1 (a) a schematic generator is shown, and an example of a farm connection
and cable transmission is illustrated in (b).
35
20 -100 m
Buoy
Ocean
wave
Generator
enclosure
Translator
with PMs
2-6m
Rope
Converter
Transmission
cable
Stator with
cable windings
Transformer
Foundation
on seabed
Spring
Ocean
Land
Grid
Generator Rectifier
(a) Power take-off
(b) Transmission schematics, [22]
Figure 3.1: Permanent magnet linear generator for wave energy conversion, (a) power
take-off and (b) electric connections and transmission, [22].
3.2
Force models
All parts in the power take-off system contribute with forces that either energize or damp the motion of the translator. The forces are presented in Eqs.
(3.1-3.6), [9].
mẍ
=
Fb + Fem + Fes + Fs + mg
(3.1)
Fb
=
(3.2)
Fs
=
Fem
=
P
=
U gVb
−F0 − k'x
dWG
dx
dWG
dt
where
WG
=
B2G
dV .
2P0 G
(3.3)
(3.4)
(3.5)
(3.6)
m is the mass of the translator and the buoy, in the equations above, if the buoy
force is greater than zero, or the mass of the piston only. Fb is the buoy force,
Fem denotes the electromagnetic forces, Fes is an end stop force, modelled as
a stiff spring to prevent the piston from leaving the generator, and Fs is the
spring force. U denotes the water density, g represents gravity and Vb is the
volume of the water displaced by the buoy. z is the position of the wave and
x is the piston position, along the same vertical axis. F0 is the spring charge,
k denotes the spring constant, and Fem is calculated from the electromagnetic
field in the airgap. The energy in the airgap, WG , is integrated from functions
36
of the magnetic flux in the airgap, BG , and the permeability P0 , over the airgap
volume VG .
Such a configuration generates voltages and currents that not only vary
in amplitude and frequency, but also in phase orientation as the translator
reverses direction, as indicated in Fig. 3.1. A corresponding rotating phenomenon would be a rotor that spins in the clockwise direction first, then
stops, and when it starts again it rotates in the anti-clockwise direction.
3.3 Cogging
A phenomenon, called cogging here, appears if the distance between two magnets of the same polarity is a multiple of the distance between six stator slots.
If a magnet opposes a stator tooth the field is locked in the steel material.
When the translator moves the field stays in the tooth until the next tooth is
closer. Then the field lets go and the magnet is jerked towards the next tooth.
See also [15].
When all magnets follow the same pattern the motion is affected and the
translator no longer moves smoothly. Cogging causes excessive fatigue to materials and introduce spikes in the power output.
3.4
Rectification of generator output
The generator terminal voltage is far from sinusoidal, both due to the stochastic nature of the waves and due to the linear generator setup itself (the translator stops and reverses). See e.g. Fig. 6 in paper I or Fig. 2.5. Power electronic
components, [58], [59], are required to shape the electricity into something
useful, and a diode rectifier can be connected as a first step.
There are different levels for semiconductor modelling, as well as for generators, and the model types are suitable for different purposes. FE models
of e.g. diodes are aimed at diode development, [60], [61], and lumped circuit
models are used in circuit simulation software, [62]. The most simple model
of a diode, a switched resistance, [49] – [64], is often used in external circuits
coupled to FE simulations.
The introduction of a diode in a circuit affects the voltages and currents on
both sides of the diode, see paper V where a rectifier model was included as
an external circuit in detailed FE calculations.
3.5
Farm connections and transmission
It is possible to interconnect several linear generators in farms provided that
each unit has a rectifier and the interconnection is done in parallel on the DC
37
side. The DC voltage will then serve as a regulation parameter, as seen in
paper III, and the power variations from each generator appears as variations
in current injections. The power output from one unit varies widely over a
wave period, whereas the power variations from several units in a farm are
less severe, paper VII.
The units can be interconnected in farms in several ways using transformers
and / or power electronic components, illustrated in paper IV and IX. A cable
is used for the transmission of power to the electrical grid onshore, [65] – [67].
Paper IV shows some transmission options, and in paper V a more detailed
simulation procedure for connecting a rectifier to the FE simulations is presented.
3.6
Experimental work
Two experimental generators were built. The first was aimed for laboratory
use, and the experimental data in the verification in paper I was obtained from
this setup, see Fig. 3.2.
Figure 3.2: Prototype in laboratory. The blue structure supports the stator windings
and the translator is pulled by a motor, seen to the right.
The second generator is a part of a full scale test unit, which was installed
near Islandsberg on the Swedish west coast, in March 2006.
38
4. Hydropower upgrading
4.1
High voltage generators
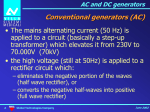
The generators found in most hydro power plants today are conventional synchronous machines in which the voltage level cannot exceed 25 kV due to
insulation limits. This means that a high current, I , is needed in the stator
windings to obtain a high output power. Since the resistive losses and mechanical forces are proportional to I 2 , a lower current is desirable. A transformer is
also a necessity, when a lower generator voltage is used, as transmission voltages can be of magnitude of several hundred kV. The transformer step also
contributes to the losses.
It is possible to increase the voltage substantially by using a PowerformerT M
generator, described in [68]–[71], due to the use of insulated cables in the stator windings, [72]. A number of transformers in a power system can thereby
be removed completely, or replaced by cheaper and more efficient autotransformers, whose function is described in [73]. Generator and transformer losses
can be cut by several per cent. In Fig. 4.1 a traditional single line diagram and
a Powerformer diagram are presented. A cable wound high voltage generator
has been built for 155 kV and can theoretically be designed for voltages as
high as 400 kV.
Generator
breaker
HV Breaker
Grid
Generator
Transformer
Surge arresters
HV Breaker
Grid
Powerformer
Surge arrester
Figure 4.1: Single line diagams, conventional generator (top) and Powerformer
39
4.2
Small-scale hydropower
It is of interest to discuss the small hydropower plants even if the energy production from each station is small. Historically, the plants have grown in size
over the years, and several small plants were installed 50 - 100 years ago. See
also [74]. This implies, that if they have not been restored already, the need
for refurbishment is high. It might even be time for a second restoration of the
oldest plants. [75]
A recent study, [29], shows that an upgrade to new technology results in
two advantages. Firstly, the number of components is reduced, resulting in a
reduction of cost compared with replacement of these components during a
conventional restoration. Secondly, the power production is increased as the
available power is converted more efficiently. The annual energy production
from plant the in the study, where the total power is 18 MW, is estimated to
increase more than 5%, from 75 to 79.2 GWh.
4.3
Economical modelling
For hydropower plants that are due for an upgrading one can easily motivate
a change to a more efficient system. It might not be that simple to justify an
upgrading for a fairly new installation, even if it is possible.
Parameters that are taken into account in the economical models are reduction in losses, reduction of number of components, reduction of maintenance,
and increased system efficiency. These parameters are combined, and the formula for capitalized cost may be used
/ = D · H · pkW ·
1 − (1 + r)−n
.
r
(4.1)
Here / is the value of one installed kW, D is the utilization factor, H =8760 is
the number of hours in one year, pkW is the price per kWh, r is interest rate,
and n the number of years for the investment. This equation can be used as
a first estimate to determine how much an investment is allowed to cost with
respect to the increase in energy production.
4.4 Upgrading of Swedish hydropower
A study was conducted in 2003 regarding the upgrading potential for hydropower in Sweden. This study resulted in two reviewed papers, XI and XII,
and a report to the Swedish Energy Agency (STEM), [76].
The work was done as a cooperation between Electricity and Lightning
Research at Uppsala University and Luleå Technical University.
40
5. Summary of papers
I: An electrical approach to wave energy conversion, [19]
This paper describes the work with renewable kinetic electric energy conversion at Uppsala University, applied to wave energy. Direct drive is promoted to
reduce maintenance cost and the theoretical foundation is presented. Results
are provided from simulations and experiments.
Renewable Energy, vol. 31, no. 9, July 2006. The author’s research is used
in the paper, but there was no direct participation in the writing. The paper
was number 11 on the TOP25 list for Renewable Energy in January-March
2006. Refereed journal publication, published.
II: Simulated response of a linear generator wave energy converter, [20]
The behaviour of a linear generator wave energy converter with a point absorber is investigated in this paper for an authentic wave climate, i.e. the generator is simulated for waves other than the design wave. It is found that the
output power characteristics for waves smaller than the design wave is similar
to the output for the nominal wave, only lower in amplitude. A limiting function is found for waves higher than the design wave, as a built-in feature of the
system. The system can therefore, hopefully, limit the destructive overloads,
e.g. during a storm.
Oral presentation at the ISOPE-2004 conference in Toulon, by O. Danielsson. The author participated in the evaluation work. Refereed conference
publication.
III: Dynamics of a linear generator for wave energy conversion, [21]
A rectifier is included in the FEM simulations as it is a part of the system and
has a great impact on the electric parameters. The induced voltage determines
whether the diode conducts or blocks; if the induced voltage is higher than the
DC voltage the diode conducts. The DC voltage level is therefore essential for
the current (i.e. power) output from the generator, and is varied in simulations
in this paper, as well as simulated ocean wave heights. Optimum DC voltages
are identified for three wave heights.
Oral presentation at OMAE-2004 in Vancouver by M. Eriksson. The author
contributed with text, layout and evaluation. Refereed conference publication.
41
IV: Wave energy transmission system concepts for linear generator
arrays, [22]
Transmission and farm interconnection aspects are discussed in this paper.
Four transmission options and four connection schemes are presented and
evaluated with examples. The conclusion is that small farms are most economical with small transmissions. This means that as little equipment as possible
is placed at sea. Large installations, on the contrary, might gain from power
components offshore.
Ocean Engineering Volume 31, number 11–12, August 2004. The author
initiated and completed the paper. The paper was third on the TOP25 list
for Ocean Engineering in July-September 2004. Refereed journal publication,
published.
V: Time stepping finite element analysis of variable speed synchronous
generator with rectifier, [23]
Direct driven variable speed synchronous generators will have a variable output. It is therefore necessary to convert the voltages and currents to make them
grid compatible. A rectifier model that handles variable voltages and variable
directions (i.e. for linear generators) is presented in this paper. Simulations are
used to illustrate the rectifier behaviour.
Applied Energy volume 83, number 4, April 2006. The author is main author. Refereed journal publication, published.
VI: Analytical and circuit simulations of linear generators in farm, [24]
A mathematical model is used to describe the ideal generator EMF in a PSpice
simulation environment. An inductance and a resistance were placed in series
to model the generator impedance. Five such generators were modelled and
connected to rectifiers, and the output was analyzed for five cases where the
amplitudes and frequencies were varied between the generators.
Presented by the author with a poster at the 2005/06 IEEE PES Transmission and Distribution Conference in Dallas, USA, 23 May 2006. The author
is main author. Refereed conference publication.
VII: Farm size comparison with analytical model of linear generator wave
energy converters, [25]
The material in this paper builds on paper VI, and has been extended to include
a comparison with ten generators. A smoother power output can be detected
with more generators if the generators’ translator motions are well spaced.
This paper was accepted for publication in May 2006 in Ocean Engineering.
The author is the main contributor. Refereed journal publication.
42
VIII: Ideal analytical expression for linear generator flux at no load
voltage, [26]
The harmonic content in the voltage generated from a linear generator varies
widely over a wave period. An ideal expression for the voltage harmonics has
been derived with Fourier series expansions in this paper, so that the harmonics are expressed as multiples of the fundamental translator frequency. The
knowledge of the harmonic content is useful for the design of the transmission system and electrical filters, primarily to avoid resonance. The mathematical model from papers VI and VII is used, and is also compared with finite
element simulations.
Conditionally accepted for publication in Journal of Applied Physics in August, 2006. The author is main author. Refereed journal publication.
IX: Wave energy potential in the Baltic Sea and the Danish part of the
North Sea, with reflections on the Skagerrak, [27]
A cooperation project with the Swedish utility Vattenfall resulted in a survey
of the potential for wave energy in the Baltic and the Danish part of the North
Sea. Several aspects of wave energy are addressed, such as ecological impact,
energy and efficiency calculations, geological impact (i.e. seabed conditions)
and some case studies are used as illustrations.
Submitted to Renewable Energy in March 2006. The author contributed to
the transmission aspects of the case studies. Refereed journal publication.
X: Generators and electrical systems for direct drive energy conversion,
[28]
Continuous speed variations will be a challenge for direct drive generators
aimed for renewable energy conversion, as an as high efficiency as possible is
desired for all load conditions. The efficiencies for two generators, one linear
and one rotating, have been mapped in simulations with respect to translator
velocity or rotor speed in this paper. It is concluded that both generators, with
data from experimental set-ups, exhibit good efficiencies for part load (half
speed) up to severe overload (2.5 times nominal speed); >70% for the rotating
and >80% for the linear generator.
Oral presentation (by the author) at MAREC’06 in London, UK, 9 March
2006. The author is corresponding and contributed mainly to work on linear
generators. Refereed conference publication.
XI: Case study of upgrading potential for a small hydro power station,
[29]
It is possible to increase power output from small hydropower plants by optimizing the use of the available power. A new generator and electrical system
can further reduce losses. In this paper a Swedish small hydropower plant is
used as a reference, a new generator is simulated and a new system is pro-
43
posed. The annual increase in energy production is estimated to 4.2 GWh for
the total generator power of 18 MW.
Renewable Energy volume 30, number 7, June 2005. The author is main
author. Refereed journal publication, published.
XII: Upgrading generators with new tools and high voltage technology,
[30]
Several hydropower plants are investigated and new generators are simulated.
Losses are estimated and the conclusion is that losses may be cut by up to 66
% compared with losses today.
Journal on Hydropower and Dams, Volume Eleven, Issue Three, 2004. As
paper (XI), this paper resulted from a study in 2003. The author contributed
with simulations and evaluation work. Refereed journal publication,
published.
44
6. Discussion
One of the first issues that one encounters when working with direct drive
systems is that the frequency is far from constant. This means that most conventional models are out of scope, and it is also essential to investigate the
operating conditions for experimental material.
It is important to know the purpose of the simulation work to choose the
right model. Detailed models require longer computing times than simpler
models, and the results correspond to the level of detail. That is why it is useful to use detailed FE simulations to gain knowledge of the device properties.
FE simulated results can act as a "target" for simpler models if real experimental results are lacking (which was the case during the first half of the
work). It is also possible to continue to use the FE simulations as targets even
if experimental data are present, as long as the FE model has been properly
verified.
Paper I includes simulated and measured data, which serves as a verification
of the FE software used. This verification is reproduced in Fig. 6.1.
8
8
Va
Vb
Vc
6
4
Voltage (V)
4
Voltage (V)
Va
Vb
Vc
6
2
0
-2
2
0
-2
-4
-4
-6
-6
-8
-8
0
2
4
6
8
10
12
14
16
18
Time (s)
(a) Experiment, three-phase voltage
20
0
2
4
6
8
10
12
14
16
18
20
22
Time (s)
(b) Simulation, three-phase voltage
Figure 6.1: Verification of simulation with experimental results. From [19].
The energy output is probably more interesting than the technology from a
commercial perspective. An attempt to estimate the annual energy production
is presented in paper II, although the models used will need a revision to be of
great significance for the future. The research has moved on in several fields,
e.g. [77], [78], and an updated hydrodynamic model is essential.
One significant result for the control of a linear generator with a rectifier is
found in paper III, see Fig. 6.2. The power output is highly dependent on the
level of the DC voltage on the DC bus. This means that there is an optimal DC
45
voltage for all wave conditions, which will serve as a target in a future control
algorithm.
25
Power (kW)
20
15
10
5
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
DC-voltage (kV)
T=3.0s
T=4.5s
T=6.5s
Figure 6.2: Output power for three wave periods: 3.0, 4.5 and 6.5s as functions of DC
level. Each x represents a full physics simulation, [21]. The shorter wave period (3.0s)
returns the highest power as the translator moves fast.
An overview of system transmission options was presented in paper IV. It is
implied that the farm size and the distance to the electrical grid are important
parameters in choosing transmission system. What has yet to be addressed are
the power quality and reliability issues with respect to transmission scheme.
Offshore wind power also deals with these questions, e.g. [79] – [81].
Rectification was studied in paper V and an illustration of how a diode in a
circuit affects the voltage and currents on both of its sides is found in Fig. 6.3.
This means, for example, that the behaviour of fields in the generator changes
when a diode is connected to the generator terminals.
Rectifier models are commonly used in simulation software (e.g. PSpice),
and such diode models were used in applied farm simulations in paper VI and
VII to see what happens when several units are interconnected to the same
DC bus. The studied examples constitute a basic overview of the generic farm
behaviour, and it is indicated that the power fluctuations are reduced with an
increased number of units in the farm.
One step further was taken in paper VIII to calculate the harmonics in the
generated voltage. This model can be developed further as only the no-load
voltage is calculated. Another need for improvement is to include the stator
winding ratio in the model. Today is the ratio only used as a scaling, but including the ratio would improve the effects of cogging and the flux harmonics.
To include the ratio the idealized assumption that ) = cosT must be revised,
and also include harmonics, [82]. The analytical model, and its series expansion, can also be expanded with the force equations, Eqs. (3.1) – (3.4), to use
the wave motion, rather than the translator motion.
An estimate of the wave energy potential in the Baltic Sea is presented in
paper IX, which was a co-operation between the Swedish utility Vattenfall and
the wave energy group in Uppsala. One insight from the project was that the
46
(a) Currents
(b) Voltages
Figure 6.3: AC (solid) and DC currents and voltages, at constant piston speed, [23].
The corresponding AC graphs without the rectifier are sinusoidal.
ocean waves in Swedish waters have not been measured carefully compared
with, e.g., the waves in the USA. It is likely that new hind casting models,
verified with long-term measurements, would provide more reliable results of
the overall Swedish potential.
The direct drive concept, where the source motion drives the generator rotor
(or translator) directly, results in the varying induction shown in several illustrations through the thesis. It is almost without meaning to talk about nominal
speed for these generators as they always run at part load (=slow) or overload
(=fast). It is, however, important that the generators have a wide frequency
optimum, and this aspect has been simulated in paper X for a linear, see Fig.
6.4 and a rotating machine.
89
LG Efficiency [%]
88
87
86
85
84
83
82
81
0.5
1
1.5
Speed [p.u.]
2
2.5
Figure 6.4: Efficiency with respect to translator speed for 13 kW linear generator. [28]
Nominal speed at 1 p.u. is 0.8 m/s
47
Hydropower is a large contributor to the Swedish energy mix. A study done
in 2003 showed that the electrical efficiency of a hydropower plant could be
increased significantly. For plants with generators rated at a power less than
15 MVA the increase can be as high as 5%. The efficiency for larger plants
can be increased by 1% or more. This is described in paper XI and XII. A
revision of the waterways and turbines may lead to even higher increases in
energy production.
48
7. Conclusion
7.1
Linear generator wave energy converter
A wave energy system with a linear generator, a point absorber and springs can
be used for renewable electric energy conversion. Such a device will produce
currents and voltages with varying frequencies and amplitudes in accordance
with Faraday’s law. See Fig. 7.1. Therefore must the output be rectified with
power electronic components. The DC output then allows for several units to
be interconnected in a farm, to increase the total output power and reduce the
number of transmission cables (if found economically favourable).
23 May 2006, 07:50:50 PM
150
Voltage (V)
100
50
0
-50
-100
-150
-10
-8
-6
-4
-2
0
Time (s)
2
4
6
8
10
Figure 7.1: Example of raw experimental data from the Lysekil test plant, three phase
load voltage. Unpublished work by courtesy of Olle Svensson.
An analytical model for identifying the harmonics in the induced no-load
voltage has been proposed and verified with FE simulations and indirectly
with experimental results. This model can be used in system design for farmto-grid connection, to avoid resonance frequencies in filters, cables and power
electronic equipment.
7.2 Hydropower upgrading
An upgrading of the hydropower generator to a new high voltage generator,
with a cable wound stator, can increase the efficiency substantially and elimi49
nate the need for an intermediate transformer for connection to the power grid.
The exclusion of the transformer reduces space consumption in the plant, reduces environmental impact and reduces losses. One circuit breaker, the generator breaker, which must handle high currents, is also excluded.
Resistive losses also decrease as the system with a high voltage generator
implies that the current is low, and the ohmic losses are proportional to I 2 . The
cooling system can thereby be reduced in size, and cooling costs decrease.
An upgrading to a high voltage generator renders a substantial gain, in all.
For a small plant the electric efficiency alone may increase with 5%.
50
8. Svensk sammanfattning
Tillgång på el är en viktig fråga för dagens - och morgondagens - samhälle.
Kraven är höga på energiomvandling från nya och nygamla energikällor:
miljöpåverkan och kostnad ska minimeras. Det är i sammanhanget viktigt att
skilja på energikällan (=fysiken) och omvandlingen (=tekniken) eftersom
källan kan vara energirik och en teknik med låg effektivitet eller hög
miljöpåverkan används. Denna påverkan är ofrånkomlig, men den kan
minimeras, och en annan teknik kan medföra en högre effektivitet. Fysiken
bör man inte döma ut, bara tekniken.
Två energikällor utgör basen i arbetet bakom den här avhandlingen: energin
i havsvågor samt den potentiella energin i älvar. Vågkraften kan anses vara ny
eftersom den inte finns i kommersiell drift ännu, medan vattenkraften använts
i över ett sekel.
Vågkraften står idag inför en spännande framtid. Flera grupper har inlett
samarbeten med industriella partners för att kommersialisera sina produkter,
och koncepten bygger på fundamentalt olika tekniska principer. Den tekniska
lösningen som används i det här arbetet baseras på en punktabsorbator (boj)
på vattenytan som kopplas direkt med en lina till translatorn ("rotorn") i en
linjärgenerator på havsbotten. Mellan generatorfundamentet och translatorn
sitter en fjäder som förbättrar rörelsen. Då en vågtopp lyfter bojen dras translatorn genom statorn (som är fast i fundamentet) och fjädern lagrar energi.
I vågdalen bidrar fjädern till en ökad hastighet hos translatorn. Permanentmagneter är monterade på translatorn, och på så sätt induceras en spänning i
trefaslindningarna i statorn.
Eftersom vågorna är oregelbundna, och på grund av aggregatets konstruktion, så varierar frekvensen och amplituden kontinuerligt hos den alstrade
elen. Effekten varierar från noll i translatorns vändlägen till ett maxvärde när
hastigheten är som högst. För att jämna ut effektvariationerna vill man koppla
flera aggregat i en park, och för detta kopplas en likriktare till varje generator.
Ett transmissionssystem kan sedan designas för att överföra elen till elnätet på
land.
Flera aspekter av vågkraftkonceptet beskrivs i artiklarna i avhandlingen,
med fokus på likriktning, sammankoppling och parksimuleringar. En analytisk härledning som kan utgöra grunden till ett verktyg för systemdesign
presenteras också.
Vattenkraften har byggts ut i Sverige i över hundra år och de största anläggningarna togs i drift på 1950-80-talen. Idag behöver flera av dessa rustas upp
51
och en av delarna som kan uppgraderas är generatorn. En studie har visat att
den elektriska verkningsgraden hos vattenkraftanläggningar kan höjas med en
kabellindad högspänningsgenerator. För stora kraftverk kan det röra sig om
1% medan mindre anläggningar kan förbättra verkningsgraden med upp till
5%.
52
References
[1] Furnas C.C. Future sources of power. Science, 94, 1941.
[2] Thorburn K. Modelling new generators for wave energy conversion and
hydropower upgrading. Licentiate thesis UURIE 297L, Uppsala Univerity,
Sweden, December 2004.
[3] Clément A., McCullen P., Falcaõ A., Fiorentino A., Gardner F., Hammarlund
K., Lemonis G., Lewis T., Nielsen K., Petroncini S., Pontes M.-T., Schild P.,
Sjöström B.-O., Sørensen H.C., and Thorpe T. Wave energy in Europe: current status and perspectives. Renewable and Sustainable Energy Reviews,
6(5):405–431, 2002.
[4] Falnes J. and Løvseth. Ocean wave energy. Energy Policy, 19(8):768–775,
October 1991.
[5] Glendenning I. Ocean wave power. Applied Energy, 3(3):197–222, July 1977.
[6] Thorpe T.W. and Picken M.J. Wave energy devices and the marine environment.
IEE Proceedings A, 140, 1993.
[7] Ivanova I. Simulation of Linear Permanent Magnet Octagonal Generator
for Sea Wave Energy Conversion. Licentiate thesis UURIE 295-04L, Uppsala
Univerity, Sweden, December 2004.
[8] Thematic Network on Wave Energy. Results from the work of the European
Thematic Network on Wave Energy. Report, E.E.S.D, European Community,
2003.
[9] Leijon M., Bernhoff H., Ågren O., Berg M., Isberg J., Sundberg J., Karlsson
K.-E., and Wolfbrandt A. Multiphysics simulation of wave energy to electric
energy conversion by permanent magnet linear generator. IEEE Transactions
on Energy Conversion, 20(1):219–224, March 2005.
[10] Danielsson O., Thorburn K., Sjöstedt E., Eriksson M., and Leijon M. Permanent
magnet fixation concepts for linear generator. Fifth European Wave Energy
Conference, Cork, Ireland, 17–20 September 2003.
[11] Eriksson M., Isberg J., and Leijon M. Hydrodynamic modelling of a direct
drive wave energy converter. International Journal of Engineering Science,
43(17–18):1377–1387, November 2005.
53
[12] Nilsson K., Danielsson O., and Leijon M. Electromagnetic forces in the air
gap of a permanent magnet linear generator at no load. Journal of Applied
Physics, 99(3), 034505, February 2006.
[13] Ivanova I., Ågren O., Bernhoff H., and Leijon M. Simulation of a 100 kW permanent magnet octagonal linear generator for ocean wave conversion. Fifth
European Wave Energy Conference, 17–20 Sep, Cork, Ireland, 17–20
September 2003.
[14] Ivanova I.A., Ågren O., Bernhoff H., and Leijon M. Simulation of wave-energy
converter with octagonal linear generator. IEEE Journal of Oceanic Engineering, 30(3):151–161, July 2005.
[15] Ivanova I., Ågren O., Bernhoff H., and Leijon M. Simulation of cogging in a
100kW permanent magnet octagonal linear generator for ocean wave conversion. Symposium on Underwater Technology, 20–23 Apr, Taipei, Taiwan,
20-23 April 2004.
[16] Leijon M. Danielsson O. and Sjöstedt E. Detailed study of the magnetic circuit
in a longitudinal flux permanent-magnet synchronous linear generator. IEEE
Transactions on Magnetics, 41(9):2490 – 2495, September 2005.
[17] Ivanova I.A., Bernhoff H., Ågren O., and Leijon M. Simulated generator for
wave energy extraction in deep water. Ocean Engineering, 32(14–15):1664–
1678, October 2005.
[18] Thorburn K. Eriksson M. Danielsson O., Leijon M. and Bernhoff H. A direct
drive wave energy converter - simulations and experiments. Proceedings of
OMAE’05, 12–17 June, Halkidiki, Greece, pages 797–801, 2005.
[19] Leijon M., Danielsson O., Eriksson M., Thorburn K., Bernhoff H., Isberg J.,
Sundberg J., Ivanova I., Sjöstedt E., Ågren O., Karlsson K.-E., and Wolfbrandt
A. An electrical approach to wave energy conversion. Renewable Energy,
31(9):1309–1319, July 2006.
[20] Danielsson O., Thorburn K., Sjöstedt E., and Leijon M. Simulated response of
a linear generator wave energy converter. Proceedings of ISOPE’04, 23–28
May, Toulon, France, pages 260–265, 2004.
[21] Eriksson M., Thorburn K., Bernhoff H., and Leijon M. Dynamics of a linear generator for wave energy conversion. Proceedings of OMAE’04, 20–25 June,
Vancouver, Canada, pages 545–549, 20–25 June 2004.
[22] Thorburn K., Bernhoff H., and Leijon M. Wave energy transmission system
concepts for linear generator arrays. Ocean Engineering, 31(11-12):1339 –
1349, August 2004.
54
[23] Thorburn K., Karlsson K.-E., Wolfbrandt A., Eriksson M., and Leijon M. Time
stepping finite element analysis of variable speed synchronous generator with
rectifier. Applied Energy, 83(4):371–386, April 2006.
[24] Thorburn K. and Leijon M. Analytical and circuit simulations of linear generators in farm. IEEE PES Transmission and Distribution Conference, 21-24
May, Dallas, USA, 2006.
[25] Thorburn K. and Leijon M. Farm size comparison with analytical model of
linear generator wave energy converters. Accepted for publication in Ocean
Engineering, May 2006.
[26] Thorburn K. and Leijon M. Ideal analytical expression for linear generator flux
at no load voltage. Conditionally accepted for publication in Journal of
Applied Physics, August 2006.
[27] Henfridsson U., Neimane V., Strand K., Kapper R., Bernhoff H., Danielsson O.,
Leijon M., Sundberg J., Thorburn K., Ericsson E., and Bergman K. Wave energy
potential in the Baltic Sea and the Danish part of the North Sea, with reflections
on the Skagerrak. Submitted to Renewable Energy, March 2006.
[28] Thorburn K., Nilsson K., Danielsson O., and Leijon M. Generators and electrical
systems for direct drive energy conversion. MAREC’06, London, UK, 6–10
March, 2006.
[29] Thorburn K. and Leijon M. Case study of upgrading potential for a small hydro
power station. Renewable Energy, 30(7):1091–1099, June 2005.
[30] Bolund B., Thorburn K., Sjöstedt E., Eriksson M., Segergren E., and Leijon M.
Upgrading generators with new tools and high voltage technology. Journal on
Hydropower and Dams, Issue Three:104 – 108, 2004.
[31] Bartle A. Hydropower potential and development activities. Energy Policy,
30(14):1231–1239, 2002.
[32] Vögele H. Design of the generators for Three Gorges. Journal on Hydopower
and Dams, Issue Three:78–81, 1998.
[33] Strand K. Energy loss and potential in the waterways of existing Swedish hydropower. Masters thesis, Uppsala University, April 2003. In Swedish.
[34] Park R. H. Definition of an ideal synchronous machine and formula for the
armature flux linkages. General Electric Review, 31(6):332–334, June 1928.
[35] Park R.H. Two-reaction theory of synchronous machines, Generalized method
of analysis - Part I. AIEE Transactions, 48:716–730, July 1929.
[36] Blondel A. E. Sur la théorie empirique des alternateurs. L’Industrie électrique,
8:481–484, 1899.
55
[37] Blondel A. E. Synchronous motors and converters. McGraw–Hill Book
Company, 1913.
[38] Concordia C. Synchronous machines – theory and performance. John Wiley
& Sons, Inc. (New York), Chapman & Hall Ltd. (London), 1951.
[39] IEEE Committee report. Recommended phasor diagram for synchronous machines. IEEE Transactions on Power Apparatus and Systems, 11:1596 –
1610, 1969.
[40] Binns K. J., Lawrenson P. J., and Trowbridge C. W. The analytical and numerical solution of electric and magnetic fields. John Wiley & Sons, Inc.,
1992.
[41] Deng E. and Demerdash N. A. CFE–SS approach for salient-pole synchronous
generators under unbalances, part II: Balanced and unbalanced rectifier loads.
IEEE Transactions on Aerospace and Electronic Systems, 33(1):152 – 162,
Jan 1997.
[42] Bolund B. Electric power generation and storage using a high voltage
approach. PhD thesis, pp. 16–23, Uppsala University, Sweden, 2006. ISBN
91-554-6552-8.
[43] Strangas E. G. Coupling the circuit equations to the non-linear time dependent
solution in inverter driven induction motors. IEEE Transactions on Magnetics, MAG–21(6):2408–2411, November 1985.
[44] Bedrosian G. A new method for coupling finite element field solutions with external circuits and kinematics. IEEE Transactions on Magnetics, 29(2):1664–
1668, March 1993.
[45] Deng E. and Demerdash N. A. O. A coupled finite-element state-space approach
for synchronous generators. Part I. model development. IEEE Transactions on
Aerospace and Electronic Systems, 32(2):775 – 784, April 1996.
[46] Väänänen J. Circuit theoretical approach to couple two-dimensional finite element models with external equations. IEEE Transactions on Magnetics,
32(2):400 – 410, March 1996.
[47] Woodson H. and Melcher J. Electromechanical dynamics. Part I: Discrete
systems. John Wiley & Sons, Inc., 1968.
[48] Holmberg P., Leijon M., and Johansson S. A wideband lumped circuit model of
the terminal and internal electromagnetic response of rotating machine windings
with a coaxial insulation system. IEEE Transactions on Energy Conversion,
19(3):539–546, September 2004.
56
[49] Väänänen J. Combination of power electronic models with the two-dimensional
finite element analysis of electrical machines. Report 44, Helsinki University of
Technology, Laboratory of Electromechanics, Espoo, 1994.
[50] Smith K.S, Brogan P., and Wilson L. Measurements and simulations of dc drive
harmonics on an interconnected offshore system with long sub-sea cables. Proceedings of EPE’97, 8–10 Sep, Trondheim, Norway, 4, 1997.
[51] Sadowski N., Lefevre Y., Lajoie-Mazenc M., and Cros J. Finite element torque
calculation in electrical machines while considering the movement. IEEE
Transactions on Magnetics, 28(2):1410 – 1413, March 1992.
[52] McLachlan N.W. Bessel functions for engineers. Oxford University Press,
Second Edition, 1955.
[53] Glendenning I. Wave power – a real alternative? Ocean Management, 4(2–
4):207–240, 1978.
[54] Claesson L. et al. Energi från havets vågor, Efn-rapport nr 21. Energiforskningsnämnden, 1987. ISBN-91-38-09691-9.
[55] Mueller M. A. Electrical generators for direct drive energy converters. IEE
Proceedings on Generation, Transmission and Distribution, 149(4):446–
456, July 2002.
[56] Polinder H., Damen M.E.C., and Gardner F. Linear PM generator system for
wave energy conversion in the AWS. IEEE Transactions on Energy Conversion, 19(3):583–589, 2004.
[57] Leijon M. and Bernhoff H. Vågkraftaggregat, användning av ett vågkraftag-
gregat, förfarande för att genera elektrisk energi, system av komponenter för tillverkning av linjärgenerator till ett vågkraftaggregat samt förfarande vid tillverkning av en linjärgenerator, 2003. Swedish patent no
SE520921 C.
[58] Mohan N., Undeland T., and Robbins W. Power Electronics. John Wiley &
Sons Inc., 1995.
[59] Thorborg K. Power Electronics – in Theory and Practice. Studentlitteratur
& Chartwell-Bratt Ltd., 1993.
[60] Chen R-C and Liu J-L. An iterative method for adaptive finite element solutions
of an energy transport model of semiconductor devices. Journal of Computational Physics, 189(2):579–606, August 2003.
[61] Chen Z. A finite element method for the quantum hydrodynamic model for
semiconductor devices. Computers and Mathematics with Applications,
31(7):17–26, April 1996.
57
[62] Strollo A. and Napoli E. Power rectifier including self heating effects. Microelectronics Reliability, 38(12):1899–1906, December 1998.
[63] Hecht F. and Marocco A. A finite element simulation of an alternator connected
to a non linear external circuit. IEEE Transactions on Magnetics, 26(2):964–
967, March 1990.
[64] Preston T. W., Sturgess J. P., and Tarkanyi M. Finite-element simulation of a
generator feeding into a rectified load. IEE Fifth Conference on Electrical
Machines and Drives, 341:311–315, 11–13 Sep 1991.
[65] Wallace A.R.S and Whittington H.R. Measurements and simulations of dc drive
harmonics on an interconnected offshore system with long sub-sea cables. 3rd
IEE Conference on Future Energy Concepts, 27–30 Jan, London, UK,
192, 1981.
[66] Bianchi G. and Luoni G. Induced currents and losses in single-core submarine
cables. IEEE Transactions on Power Apparatus and Systems, PAS-95(1),
Jan–Feb 1976.
[67] IEEE Standards Board. IEEE guide to the factors to be considered in the planning, design, and installation of submarine power and communications cables.
IEEE Std 1120–1990, September 1990.
[68] Leijon M. and Liu R. Energy technologies: Electric power generators, volume 3, inbook 4, pages 151–164. Landolt–Börnstein, 2002.
[69] Leijon M., Berggren B., Owman F., and Karlsson T. High voltage power generators without transformers. Journal on Hydropower and Dams, Issue four:37–
40, 1998.
Rotating electric machines with magnetic circuit for high
voltage and method for manufacturing the same, 2004. US patent no
[70] Leijon M.
US2004084987.
[71] Leijon M., Owman F., and Karlsson T. Power generation without transformers.
Journal on Hydropower and Dams, Issue two:97–98, 1998.
[72] Leijon M., Dahlgren M., Walfridsson L., Li Ming, and Jaksts A. A recent development in the electrical insulation systems of generators and transformers.
IEEE Electrical Insulation Magazine, 17(3):10–15, May/Jun 2001.
[73] Grainger J. and Stevenson W. Power System Analysis. McGraw–Hill Book
Co., 1994.
[74] Lyndon L. Hydro-electric power. McGraw-Hill Book Company, Inc. (New
York), Hill Publishing CO. Ltd. (London), 1916.
58
[75] Paish O. Small hydro power: technology and current status. Renewable and
Sustainable Energy Reviews, 6:537 – 556, 2002.
[76] Gustavsson H. Karlsson T. Leijon M. Nilsson S. Sjöstedt E. Bernhoff H.,
Dahlbäck N. and Strand K. Vattenkraftens utvecklingspotential i befintliga anläggningar, 2003. Report (in Swedish) to the Swedish Energy Agency.
[77] Eriksson M., Isberg J., and Leijon M. Hydrodynamic modelling of a direct
drive wave energy converter. International Journal of Engineering Science,
43(17-18):1377–1387, November 2005.
[78] Danielsson O., Eriksson M., and Leijon M. Study of a longitudinal flux permanent magnet linear generator for wave energy converters. International
Journal of Energy Research, Accepted for publication, published online(DOI:
10.1002/er.1209), 2006.
[79] Martander O. DC grids for wind farms. Report 443L, Department of Electric
Power Engineering , Chalmers University of Technology, Göteborg, Sweden,
2002. Available online, www.elkraft.chalmers.se.
[80] Reidy A. and Watson R. Comparison of VSC based HVDC and HVAC interconnections to a large offshore wind farm. IEEE Power Engineering Society
General Meeting, 12–16 June, 2005.
[81] Morton A.B., Cowdroy S., Hill J.R.A., Halliday M., and Nicholson G.D. AC
or DC? Economics of grid connection design for offshore wind farms. The 8th
IEE International Conference on AC and DC Power Transmission, 28–31
March, pages 236–240, 2006.
[82] Waters R., Danielsson O., and Leijon M. Measuring air gap width of permanent
magnet linear generators using search coil sensor. Submitted to Journal of
Applied Physics, February 2006.
59
Acta Universitatis Upsaliensis
Digital Comprehensive Summaries of Uppsala Dissertations
from the Faculty of Science and Technology 202
Editor: The Dean of the Faculty of Science and Technology
A doctoral dissertation from the Faculty of Science and
Technology, Uppsala University, is usually a summary of a
number of papers. A few copies of the complete dissertation
are kept at major Swedish research libraries, while the
summary alone is distributed internationally through the
series Digital Comprehensive Summaries of Uppsala
Dissertations from the Faculty of Science and Technology.
(Prior to January, 2005, the series was published under the
title “Comprehensive Summaries of Uppsala Dissertations
from the Faculty of Science and Technology”.)
Distribution: publications.uu.se
urn:nbn:se:uu:diva-7081
ACTA
UNIVERSITATIS
UPSALIENSIS
UPPSALA
2006