Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Point-to-Point Protocol over Ethernet wikipedia , lookup
Zero-configuration networking wikipedia , lookup
Low-voltage differential signaling wikipedia , lookup
Computer network wikipedia , lookup
Internet protocol suite wikipedia , lookup
Distributed operating system wikipedia , lookup
Airborne Networking wikipedia , lookup
Network tap wikipedia , lookup
Recursive InterNetwork Architecture (RINA) wikipedia , lookup
Power over Ethernet wikipedia , lookup
Compensation of Asymmetrical Latency for
Ethernet Clock Synchronization
Natasa Simanic∗ , Reinhard Exel∗ , Patrick Loschmidt∗ , Thomas Bigler∗ , and Nikolaus Kerö†
∗ Institute
for Integrated Sensor Systems, Austrian Academy of Sciences, Wiener Neustadt, Austria
Email: {Natasa.Simanic, Reinhard.Exel, Patrick.Loschmidt, Thomas.Bigler}@oeaw.ac.at
† Oregano Systems - Design Consulting GesmbH, Vienna, Austria
Email: [email protected]
Abstract—Clock synchronization has become an indispensable
service in most distributed systems as it allows to sort events on a
common time scale and coordinate collaborative actions. With the
demand for even higher synchronization accuracy, new challenges
and barriers have to be tackled to fulfill these requirements.
One of them, the inevitable signal propagation time between the
devices, is compensated in many state-of-the-art synchronization
protocols by round-trip measurements, neglecting any form of
delay asymmetry of the communication link.
In this paper, we analyze the impact of asymmetry in networks
based on the physical layer of copper-based Ethernet and
compare different approaches on how to mitigate the impact
of asymmetry. We propose a non-invasive system performing
asymmetry measurements on a link basis and show that such
a system can integrate into existing synchronization solutions.
Keywords: physical layer clock synchronization, asymmetry
mitigation, Ethernet, high accuracy
I. I NTRODUCTION
Clock synchronization is a concept originating from the
observation that internal computers’ clocks are differing and
from the necessity to have them aligned. As the desired synchronization accuracy level rises, so does the complexity of the
clock synchronization and the time distribution mechanisms.
A simple clock synchronization scheme is found in radiocontrolled clocks. For example, the DCF77 [1] synchronization
mechanism is based on long-wave radio transmitters broadcasting timing information sourced from an atomic clock
to receivers at a distance greater than 2000 km. These socalled radio-controlled clocks adjust their time according to
the received timing information. As no propagation time
compensation is performed, the clocks with larger distance
to the transmitter are delayed in a range of few milliseconds.
However, for most applications in our daily life this offset is
practically irrelevant.
In order to achieve and maintain higher accuracy synchronization, the measurement and compensation of the propagation time of the signal is compulsory. State-of-the-art
synchronization protocols such as Network Time Protocol
(NTP) [2] or Precision Time Protocol (PTP, IEEE 1588) [3]
perform round-trip measurements to mitigate the impact of the
inevitable signal propagation time. By exchanging messages
This work was partly financed by the province of Lower Austria, the
European Regional Development Fund, the FIT-IT project Ætas under contract
825904 and Oregano Systems Design and Consulting.
978-1-61284-893-8/11/$26.00 ©2011 IEEE
0 T0
t2
t3
Node B
Node A
0
t1
TAB
TBA
t4
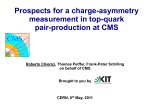
Fig. 1. A typical round-trip delay measurement scheme for state-of-the-art
clock synchronization protocols
and timestamping them accurately, first the propagation time
and then also the offset between the clocks are estimated and
compensated for. Current implementations are able to reach an
accuracy in sub-millisecond (NTP) or sub-microsecond range
(PTP).
The limiting factor for achieving even higher accuracy with
these kind of measurements is the fact of message’s latency
not being symmetric, i. e. transmit and receive paths do not
have the same network transit time. Typically, this fact is
neglected either to simplify the synchronization process or
because the impact of asymmetry can be considered low with
respect to the requested accuracy limit. Asymmetry does not
impair the precision, but if it is ignored it creates a clock offset.
As synchronization is getting even better, thanks to hardware
support, the offset caused by asymmetry is a significant factor
for the accuracy of a clock synchronization system.
The asymmetry problem is described in more detail and
narrowed down to a physical level in section II. Sources and
causes are stated and its scale and influence are explained.
In section III, the state-of-the-art methods of dealing with the
asymmetry compensation are described. An insight into the
ideas of dynamical methods of dealing with this problem in
100 Base-TX Ethernet is presented in section IV. In section V
we present possible solutions how to integrate the proposed
method into current synchronization networks. Finally, section VI summarizes the findings and gives an outlook for
future work in this area.
II. D ELAY A SYMMETRY IN C LOCK S YNCHRONIZATION
To identify the problem of asymmetry, recall how state-ofthe-art communication protocols, such as PTP, exchange peer
delay measurement messages for round-trip measurements, as
highlighted in figure 1. The clock offset and the mean link
delay of messages exchanged between the nodes are typically
calculated out of the timestamps collected in node A (i. e.
the node being synchronized). For the sake of simplicity we
assume the clock rate in both nodes is identical and only the
offset T0 between the nodes exits. The offset can be estimated
based on the propagation delays from node A to node B, TAB ,
and reverse, TBA . These delays can be expressed by:
TAB = (t2 − T0 ) − t1 ,
(1)
TBA = t4 − (t3 − T0 ),
(2)
where t1 and t3 are the message sending time instances,
and t2 , t4 are the message receiving time instances, in the
corresponding nodes.
Regardless if the link is asymmetric (TAB 6= TBA ) or not,
the offset estimation, T0 , is calculated as follows:
t2 − t1 − (t4 − t3 ) TAB − TBA
−
,
(3)
2
2
where TAB − TBA represents the channel asymmetry. In the
round-trip based latency measurements, the asymmetry is
neglected, which results in a clock synchronization offset.
In addition, if node A and B have a significant frequency
offset, the frequency offset must be compensated before the
measurement in order to scale the timespan t3 − t2 to the
timescale of node A.
Communication networks can be classified as asymmetric
for variety of reasons. Some characteristic that can influence
it are bandwidth (as in ADSL networks), media access (as in
cellular networks), link bit error rate (networks with different
link quality), or the way of data transfer (i. e. uni- or bidirectionality) [4]. In this paper we will keep focus on the
asymmetry occurring on the physical level only. There, the
asymmetry itself may originate from different sources: one is
the physical property of the transmission channel, the other
the design and implementation of the physical layer device.
In the following a summary of the sources in copper-based
Ethernet is given.
T0 =
A. PHY Device Induced Asymmetry
For practically every sophisticated modulation scheme, the
receiver module in a PHY device is a complex design, which
is performing parameter estimation methods on the sampled
signal and traceback decoding to optimally decode the received
signal. Hence, the receiver generates a much higher processing
delay than the transmitter of the same PHY, rendering the
device per se asymmetric. Note that this in fact would not be
an issue if all PHY devices within the system were to have the
same receive-to-transmit asymmetry. Since every transmitter is
paired to a receiver on the opposite side, the asymmetry would
therefore ideally cancel out. But in a realistic network this is
not the case, considering that receive and transmit delay values
are vendor specific, as shown by the measurements in [5].
In case of 100 Mbit/s Ethernet, another peculiarity of
many commercial-off-the-shelf (COTS) PHYs contributes significantly to the asymmetry. 100 Base-TX transmits with
125 MBaud/s, which is recovered as a 125 MHz clock at the
receiver. As the Media Independent Interface (MII) operates at
25 MHz, the receive clock must be divided by a factor of five.
If the clock division is not aligned to the symbol boundaries,
the receive processing may be variable by multiples (0 up to
4) of 8 ns [6]. This creates an asymmetry of up to 32 ns per
link.
The measurements presented in [7], using a COTS physical
layer device and a 100 m CAT 5 cable, have shown that
the link delay between the nodes remains constant once the
physical connection is established, but varies with each new
re-establishment. Although the delay is constant for an active
link, it still induces asymmetry as the delay at which the PHY
locks in is unknown.
B. Cable Induced Asymmetry
The cabling between the PHYs also contributes to the
asymmetry. In most wired communication systems, either the
receive and transmit paths are split by different frequencies or
dedicated wires in each direction are used to allow for simple
separation of receive and transmit information. The former
case is typical for single fiber optical communication and
only generates asymmetry if the fiber is dispersive (different
propagation speeds for different wavelengths). The latter case
is typical for, e. g., 100 BASE-TX Ethernet where a full-duplex
link uses two cable pairs, one for each direction. As the twisted
pairs can have a different twist rate and be of a different
length, it is obvious that the pairs may have a different delay.
According to the ANSI/TIA/EIA 568-B cabling standards [8],
a standard compliant CAT 5 cable may have a delay skew of
up to 50 ns for a 100 m cable.
III. S TATE O F T HE A RT
As already outlined, sub-nanosecond accuracy in clock synchronization requires a solution able to measure and mitigate
link delay asymmetries. As every link may introduce different
delays in each direction, the asymmetry should be ideally
compensated on a link basis. The more common end-to-end
measurements would theoretically yield the same outcome, if
it can be ensured that the measurement is actually performed
on the same wire pair. This would imply using a simple halfduplex communication or crossing out all links connecting
the nodes. Hence, in complex network topologies the links
between core switches or routers must be altered whenever an
asymmetry measurement is performed. As a side effect, the
communication of the entire network is impaired during this
time.
With the second version of PTP, IEEE 1588-2008 [3],
a step forward is indirectly made by enabling asymmetry
compensation. Aiming for the simpler reconfiguration after
network topology change, this protocol enabled the delay to
be measured on a per link basis, using peer-to-peer transparent clocks (P2P TC). In addition, the protocol reserves the
delayAsymmetry field for the asymmetry value. Yet, how the
asymmetry is measured is not defined within the protocol.
Hence, the PTP is in principle capable to deal with asymmetry
if the value is sourced from an external measurement.
The pitfall in measuring the asymmetry is that it cannot be
measured within the system if all the available communication
links are not mandatory symmetric. Algorithmic approaches
like the ones presented in [9] are not feasible. In their
particular approach the master must know the asymmetry and
adjust its inter-packet gap exactly to this value. In practice,
the value of the asymmetry is not known to either side of
the link. From a more general perspective, asymmetry can
be solved rather easily: it just requires an unbiased external
observer monitoring the instant of a common event among all
nodes, e. g. a 1 PPS pulse.
As installing an observer infrastructure for the asymmetry
issue only is in most cases not a tractable solution, we focus
on solutions able to measure and compensate for asymmetry
within the communication system. The success for asymmetry
measurements is not only bound by the abilities to make the
link (permanently or temporarily) symmetric, but also by the
ability to draw accurate timestamps. If the timestamp accuracy
is worse than the expected asymmetry, then the asymmetry
compensation might in fact increase the offset.
A. Manual Calibration
The easiest and simplest solutions to mitigate the cable
asymmetry is to manually measure and calibrate all cables
used within the network. Despite the simplicity of this approach there are a number of drawbacks: the measurement
itself is inconvenient if the cables are already installed within
the system. Depending on the measurement method, the length
delay measurement tool must either connect to both ends of the
cable under test or perform a reflectometric measurement with
an open or shorted termination. Labor costs for performing
such measurements are considerable.
Even if the link delays are all correctly measured, the
method is rather error-prone as every slight change in the
network requires a re-measurement. Consider a swapped cable
in a patch panel or just a device which erroneously selects
the auto-cross feature in a PHY changing the cable pairs
without notification to the user. As asymmetry changes are
not detectable within the system any deliberate or accidental
modification of the network may potentially change the delays
and therefore create a synchronization bias.
B. Communication Line Swapping
Since delay measurements on the same line for both communication directions are a precondition for adequate asymmetry compensation, twisted pair line exchange is a reasonable consideration. There are several measurement scenarios
possible.
China Mobile, a company owning the world’s largest mobile
telecommunication network, operates a large heterogeneous
backhaul network with many different kinds of physical links,
such as optical fibres and copper-based connections. Accurate
synchronization is a major key in telecommunication networks
to ensure the quality of the network for the subscribers. As
the constraints in terms of accuracy are getting even tighter,
two solutions measuring asymmetry are considered to be
implemented in the core network using PTP [10]:
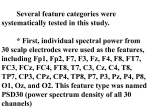
1) Line Swapping Method – Half-duplex: The first method
proposes setting the receivers and transmitters to half-duplex
mode, forcing the traffic through the same physical line and
measuring the delay precisely in both directions. After the
measurement, the link is reverted to full-duplex mode again
and the traffic flows conventionally, as shown in the figure 2a.
If the measurement is performed periodically and not only
during start-up, the communication link is interrupted and
causing connection timeouts or congestion.
2) Line Swapping Method – Line Exchange: The second
mechanism is based on exchanging the transmission and
reception lines, either manually or automatically, after the
first set of the PTP timestamps is exchanged. The protocol
is then run again, with the exchanged lines, for the second
timestamps set, as depicted in figure 2b. With the information
of both round-trip measurements, it is possible to calculate the
difference of the delays in both directions and finally the oneway delays. This method as well suffers from interrupted links
and therefore the same restrictions for dynamic measurements
apply as for the half-duplex approach. Both, half-duplex
operation or line-swapping in Ethernet can be triggered by
the PHY management interface (MDIO).
IV. DYNAMIC A SYMMETRY C OMPENSATION
In case of a unidirectional link, for any form of asymmetry
measurement it is mandatory to swap the direction of the link
to measure both directions of exactly the same wire or wire
pair. If this is only done at startup of the network, the boot
period gets extended. In the general case, where both sides
of the link are equipped with local, independent oscillators,
the frequency skew has to be compensated first. Depending
on the network type, this may take from several seconds up
to several minutes. For networks with variable delay (e. g.
due to diurnal delay variations), it is desirable to measure the
asymmetry during operation. However, a swap of transmission
lines imposes a discontinuity in data transfer.
A. Line Swapping Method: Line Iteration
As an extension to the previous methods, we suggest
the possibility of adding one hot-spare communication link
between two nodes (figure 2c). In case an asymmetry measurement is performed, the spare line is used to allow for
uninterrupted communication. As the spare pair constantly
transmits data, the clock of the far side of the link is locally
available and frequency skew estimation is not required.
The method can be extended to more than two links
increasing the efficiency of this approach. If there are n total
links, n − 1 can be physically used, hence the efficiency is
n−1
n .
Approach
Advantage
Disadvantage
Manual calibration
Line swapping HD
Line exchange
Dedicated in-system comp.
accurate
simplicity
simplicity
continuous conn.
cost, error-prone
interrupted conn.
interrupted conn.
special HW
Complexity
Accuracy
low
low
low
medium
medium – high
low
low
high
TABLE I
C OMPARISON OF THE DIFFERENT APPROACHES
Node A
Node B
(a) Line swapping approach; latency measurement over half-duplex communication
Node A
Node B
(b) Line swapping approach; full-duplex communication, measuring by exchanging the two cable lines
Node A
Node B
(c) Line swapping approach; exchanging the cable lines and measuring on
the additional line set
Node A
Node B
(d) Dedicated compensation system, Ætas; same media used, clock synchronization by out-of-band signaling
Fig. 2. Approaches overview; the dotted arrows signify the data paths used
for the clock synchronization measurements
B. Dedicated In-System Compensation
The approach considered in framework of the Ætas project
assumes that syntonization, i. e. common clock frequency
distribution in the network, is executed by the physical layer
of Ethernet. In a nutshell, a receiver recovers the transmitter’s
clock and provides it as an output. This approach is similar
to the one of Synchronous Ethernet. Removing the inevitable
offset between the nodes, i. e. phase alignment or synchronization, is performed through a periodic, automatic one-way delay
measurements on the link using synchronization messages
similar to standard PTP.
The innovation of this approach is that the synchronization
between the link partners is done by an out-of-band communication scheme, orthogonal to Ethernet, creating two logical
links. One of them is used for the normal user traffic and is
driven by a standard PHY. The other logical link is created by
a custom IC dealing with synchronization only, while using the
same physical cable pair. Ethernet traffic is in this case not interrupted with synchronization packets, since they are sent over
a separate channel (as shown in figure 2d) and fed to the dedicated clock synchronization hardware. This is accomplished
by applying a modulation scheme to the synchronization
data which is highly orthogonal to the Multilevel Transmit3 (MLT-3) encoding of 100 Base-TX Ethernet. Considered
modulation schemes are Direct Sequence Spread Spectrum
(DSSS) and m-ary Ternary Orthogonal Keying (MTOK) due
to their configurable low cross-correlation properties. As the
PAM5 modulation of GBit/s Ethernet is very similar to MLT3, the modulation can be designed to be orthogonal to 10,
100 and 1000 MBit/s and therefore forward compatible with
GBit/s Ethernet. More detail about the generic structure is
given in our previous paper [11]. The clock synchronizing
link can perform line swapping during operation without
affecting the standard data communication. Hence, asymmetry
measurements are possible without interruption of the user
communication similar to the approach with a spare link. The
out-of-band link can also be used to transfer synchronization
messages, thus enabling a complete synchronization through
this link.
All the techniques for asymmetry measurements considered
in section III and section IV are summarized and results are
presented in the table I. The main benefits and drawbacks are
listed, as well as complexity of implementation and accuracy
of achieved compensation in case of dynamic asymmetry. Low
refers to tens of ns, medium to the ns-range and high to sub-ns
accuracy per link.
V. Æ TAS I NTEGRATION AND C OMPATIBILITY WITHIN
C LOCK S YNCHRONIZATION S YSTEMS
Strictly speaking, the Ætas approach is a proprietary one.
However, the demand for low jitter in clock synchronization
systems requires a break with traditional approaches. For
instance, transparent clocks in switches are, in a strict sense,
not allowed to modify data as they are not gateways. In about
the same way the Ætas approach violates the IEEE 802.3
standard. To address this possible breaches with the standard,
we consider some scenarios to clarify that our approach can
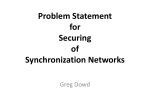
Fig. 3. Connection of Ætas equipped nodes; entire synchronization protocol
performed by the Ætas hardware module
Ætas switch
VCO
MII
Switching
controller
Ætas
Port 1
Port 2
Ætas
Node 1
Fig. 4.
Ætas
Ætas
Node 2
Ætas
Port 3
Ætas
Node 3
Communication over an Ætas equipped switch
be integrated into existing solutions without being entirely
proprietary.
In the figure 3, the simplest use case is shown, where two
Ætas devices communicate on a peer-to-peer basis. The Ætas
modules consist of an integrated PHY, which is responsible for
the communication over the Ethernet, the Ætas channel, and
additional integrated parts, like a hardware timestamper and
a microcontroller for the protocol processing. Furthermore,
different inputs (e. g. a trigger input) and outputs (e. g., a pulse
per second (PPS) output, a trigger output and a configurable
clock output) are available. The two Ætas supplied nodes in
figure 3 are able to communicate and synchronize without any
help of PTP, neither hardware nor software. The dotted line
outlines that a logical channel with an orthogonal modulation
scheme is used for the asymmetry compensation on the same
cable pair as Ethernet.
Placing Ætas in a bigger frame, figure 4 demonstrates
the scenario where the the integration of Ætas functionality
into a regular Ethernet switch is shown, performing frame
switching on layer 2 (data link) of the OSI model. In this
scenario an Ætas switch and three Ætas-enabled devices are
linked. Compared to a regular switch, switching for the logical
asymmetry compensation channel has additionally to be done
on the physical layer (layer 1 of the OSI model). Here, the
main components of the switch include Ætas modules for
every port and a switching controller, which are mutually
linked using standardized MII. To be independent of the
selected switching controller, the asymmetry information is
stored in additional registers of the Ætas PHY and can be
read out by the MDIO interface of the MII. This way the
Ætas modules can be used like standard PHYs.
As the goal is to build a synchronous network, one of the
Ætas devices has to be elected as master which consequently
provides the timebase for the overall Ætas network. The
election of the master is done via a hierarchical concept similar
to stratum in NTP, where the devices belong to a fixed stratum
class and the switch has to run a master selection algorithm to
obtain the most suitable connected device. Stating that node 3
was selected as master, its clock is then recovered in the
associated module on port 3 of the switch. The clock frequency
and phase then have to be distributed to all other Ætas modules
inside the switch and finally to node 1 and 2. To enable this,
node 3 drives the voltage-controlled oscillator (VCO) in a way
to achieve phase lock to the master node 3. The VCO clock is
then fed as the 25 MHz reference clock to all Ætas modules
(represented with the dotted line in figure 4).
Another option is to directly use the derived receive clock
from the master port. This has the drawback that an outage
of the master device may lead to a possible clock outage
on the switch and a failure of all switch ports. Hence, this
approach would need a fallback clock generator on the switch
and a clock monitoring circuit. Still this might cause an
abrupt change of frequency and phase, as these clocks are
not synchronized. The use of a VCO addresses these issues.
A master failure breaks the synchronization loop with the local
VCO, but if the guidance for the VCO is handed over to the
local clock within a reasonable time span, the synchronization
impairment can be limited. The serial connection between the
Ætas modules in the switch (solid line) is required to exchange
clock synchronization information like the selected master port
of the switch or delays and asymmetries.
Backward compatibility with IEEE 1588 is considered, as
shown in figure 5, for a scenario where only one node is
equipped with an Ætas module, and another one is able to
use PTP compatible hardware timestamping (or even software
timestamping only). The system is still able to provide clock
synchronization, but in this case the Ætas node operates like
an ordinary PTP node and has to include the PTP stack in the
host system. The usage of PTP is not restricted to this simple
peer-to-peer case, but can also be implemented in the Ætas
switch (figure 4). To achieve decent accuracy, a PTP enhanced
switching controller is required. It is extended by a PTP
protocol engine to provide transparent and boundary clock
We propose an out-of-band signaling method, using the
same cable pair as Ethernet, able to measure asymmetry and
perform all clock synchronization related tasks. The advantage
of this approach is that it can measure the asymmetry during
operation, enabling nanosecond accurate clock synchronization, while still staying standard compliant. In addition, we
outline that such a system seamlessly integrates into existing
clock distribution solutions (IEEE 1588), even in case of
network topologies consisting of multiple cascaded switches.
Future research in this area includes engineering the out-ofband communication method to achieve the desired timestamping accuracy and finally the integration of the proposed system.
R EFERENCES
Fig. 5.
Backward compatibility with PTP
features. Some vendors (e. g. Zarlink [12]) already provide
such controllers, natively supporting the IEEE 1588 protocol.
As the Ætas devices are connected point-to-point and
therefore do not need packet switching, it induces a certain
amount of processing overhead when using the User Datagram
Protocol (UDP), the underlying protocol of PTP. Consequently,
a simpler approach is to use the layer 2 PTP protocol,
standardized in Annex F of IEEE 1588-2008 [3]. This protocol
directly operates on Ethernet frames in a point-to-point way
and can thus be implemented without the usage of complex
addressing schemes. In fact, it is also possible to implement
this protocol on the hardware level, so that the host system
can just read out the current time of day (TOD) from the
Ætas devices.
VI. C ONCLUSION
Due to the introduction of hardware timestamping, clock
synchronization systems are getting more and more accurate.
While compensation for the propagation delay can be considered as sufficient for achieving accuracies below 100 ns in
Ethernet networks, accuracies in the nanosecond range demand
a method able to measure and compensate for the asymmetry.
Cable induced asymmetry is in particular difficult to tackle, as
the same cable pair must be measured in both directions.
[1] Linum Software GmbH, “Alles über das DCF77 Signal,” May 2011.
[Online]. Available: http://www.dcf77.de/
[2] D. Mills, J. Martin, J. Burbank, and W. Kasch, Network Time
Protocol Version 4: Protocol and Algorithms Specification, Internet
Engineering Task Force (IETF) Std., Jun. 2010. [Online]. Available:
http://tools.ietf.org/html/rfc5905
[3] IEEE 1588 (tm) 2.1 Standard for a Precision Clock Synchronization
Protocol for Networked Measurement and Control Systems. IEEE,
March 2006.
[4] W. Al-Khatib and K. Gunavathi, “A Novel Mechanism to Improve
Performance of TCP Protocol over Asymmetric Networks,” The International Arab Journal of Information Technology, vol. 5, no. 1, pp. 66–74,
Jan. 2008.
[5] T. Müller, A. Ockert, and H. Weibel, “PHYs and Symetrical Propagation
Delay,” in Conference on IEEE 1588 Standard for a Precision Clock
Synchronization Protocol for Networked Measurement and Control
Systems, 2004.
[6] D. Rosselot, “DP83848 and DP83849 100MB Data Latency,” Application Note 1507, Aug 2006.
[7] P. Loschmidt, “On Enhanced Clock Synchronization Performance
Through Dedicated Ethernet Hardware Support,” Ph.D. dissertation,
Vienna University of Technology, Vienna, Austria, Dec. 2010.
[8] Commercial Building Telecommunications Cabling Standard 568-B,
TIA/EIA Std.
[9] S. Lv, Y. Lu, and Y. Ji, “An Enhanced IEEE 1588 Time Synchronization
for Asymmetric Communication Link in Packet Transport Network,” in
IEEE Communications Letters, vol. 14, no. 8. IEEE Press Piscataway,
NJ, USA, Aug. 2010, pp. 764–766.
[10] L. Huang, “Compensation for Asymmetry of Physical Line,” Mar 2011,
802.1 AVB, 201103 IEEE 802 plenary.
[11] R. Exel, G. Gaderer, and N. Kerö, “Physical Layer Ethernet Clock
Synchronization,” Dec. 2010.
[12] Zarlink Semiconductor Inc., ZL30310 - Combined Synchronous Ethernet
and IEEE1588 Network Synchronization - Datasheet, June 2009.