Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
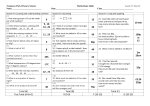
MATH205 – NUMERICAL ANALYSIS HOMEWORK 2: SYSTEMS OF LINEAR EQUATIONS, DIFFERENTIATION AND INTEGRATION Due date 12/05/2017 In this homework, you will apply the methods and techniques from numerical analysis that were treated in the first eight weeks of the course. You will use MATLAB to solve the exercises numerically. Please respect the due date. Late submissions will not be accepted for grading. Reports are delivered in electronic form as a Word file, sent by e-mail to [email protected]. Reports must have names and student numbers of authors. ALL work that you hand in MUST be your own work, not work that is copied from some other student's paper or from the internet. 1. Systems of Linear Equations [15] You are counting money (coins) from vending machines. In the first machine, there are 12 coins of 50kf, 16x20Kf and 7x10Kf. In the second one, there are 8x50Kf, 20x20Kf and 15x10Kf, while the third one contains 11x50Kf, 13x20Kf and 17x10Kf. The money boxes weigh 965 g, 941 g and 947 g respectively. Empty box weighs 200 g. 1.1 Find how much does each coin weigh! Assume all coins of the same type weigh the same. Set up and solve a system of linear equations in the standard form A x = b. 1.2 Can you tell what is specific about the numbers you get? Is there a smart characteristic of coin weigths? Can you get the same weight with two different combinations of coins? 1.3 Can you find out how many of each coins there are in a box weighing alltogether 793 g? Write a small MATLAB program that does the search! 2. Google search [10] You search many times during the day for a specific content on the web. There are trillions of web pages on the internet... So, the question is which pages are popular and which are not? Typing “numerical analysis” into Google search with specific request for search only educational sites, your browser returns results from Massachusetts Institute of Technology (MIT), University of Minnesota (UMN), University of Iowa (UIOWA) and Princeton University (Princeton). Popularity of the term “numerical analysis” within these pages is given as: MIT UMN UIOWA PRINCETON Total MIT 0 1 1 0 2 UMN 1 0 1 1 3 UIOWA 1 1 0 1 3 PRINCETON 0 1 1 0 2 Find the linking matrix (hint: normalize previous matrix). Determine popularity vector (hint: a web’s popularity is the weighted sum of the popularity of web pages which reference that web page). Solving matrix , determine popularity and web ranking among these web pages! 3. Drone flight [40] You have a drone that stores its GPS location as a function of time t, in two coordinates x(t) and y(t). The total path P the drone flu in the time interval t = 0 to t = T, is given as where x'(t) and y'(t) are the first derivatives with respect to time, of x(t) and y(t) respectively. (This is known as the arc length formula in mathematics.) The “GPS data“ are given in the file droneGPS.mat on the ressource page together with HW2. Note, units of position coordinates are in meters, and the time is given in seconds. 3.1 Use Matlab-function polyfit to find the polynomials px(t) and py(t). Use N=12. Plot in Matlab the measured data (path x(t), y(t)) together with the fitted curve (path px(t), py(t)). You may use the Matlab function polyval to evaluate the polynomials px(t) and py(t). 3.2 In stead of polyfit, try to interpolate the drone path with a spline. Is it a good idea to use polyfit or would spline give better results? Plot the two approximations and their difference! What is the fundamental difference between the two approximating methods? 3.3 Use the Matlab function polyder to find the derivative of the polinomials px(t) and py(t) and plot them as a function of time. Use the Matlab function quad to calculate the path length of the drone. Use tolerance of tol = 1e-4. Using the spline approximation and time division 0.1s, repeat the derivation using Richardsons derivation formula, and then integrate again the path. Is there a significant difference compared to the first method? 3.4 The drone can fly 300 m more. Can it fly back to the take-off position (no wind conditions...)? 3.5 BONUS! What was the average velocity and what was the average speed of the drone after 100 seconds? Plot the average speed and average velocity of the drone as a function of time. 4. Slingshot – my favorite game! [35] In your previous homework you were asked to calculate the steady-state position of an object hang on a double bungee rope. Now you will use some of that theory to do calculations and optimization of a sling-shot device! (Take time and read the link below on Y-shaped slingshot. Figure to the right is taken from the same link http://www.real-world-physics-problems.com/slingshot-physics.html ) 4.1 The maximum force with which you can pull the elastic rope is Fmax=25 N. The rope has elastic coefficient of =60 N/m. You have one meter of elastic rope (you can use less if you wish so), and the Y piece can be 10-30cm wide. The rock in the slingshot has a mass of mR=10 g. Design a slingshot that delivers maximum kinetic energy to the rock and has the best range! 4.2 You shoot horizontally with the slingshot you designed from a heigth of 3 meters. What is the range counting from your Y piece (left hand)? Disregard the air resistance. Plot the expected trajectory of the rock! (You are on Earth, g=9.81 m/s2) 4.3 Does the optimal design change if the mass of the rock changes? 4.4 BONUS! What is the range if you can choose the angle at which you incline the slingshot? --- CAN'T WAIT FOR HW3! ---