Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Faster-than-light wikipedia , lookup
Gravitational wave wikipedia , lookup
Partial differential equation wikipedia , lookup
Introduction to gauge theory wikipedia , lookup
Probability amplitude wikipedia , lookup
Equations of motion wikipedia , lookup
Nordström's theory of gravitation wikipedia , lookup
First observation of gravitational waves wikipedia , lookup
Relational approach to quantum physics wikipedia , lookup
Four-vector wikipedia , lookup
Bohr–Einstein debates wikipedia , lookup
Time in physics wikipedia , lookup
Copenhagen interpretation wikipedia , lookup
Coherence (physics) wikipedia , lookup
Photon polarization wikipedia , lookup
Diffraction wikipedia , lookup
Thomas Young (scientist) wikipedia , lookup
Matter wave wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
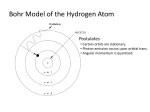
2- 1 Welcome you all to this class! SPH 308: PHYSICAL OPTICS Lecturer: Dr. Alix DEHAYEM Aim: To give a coherent introduction to the development of modern physical optics, with particular attention to the wave properties of light. Contents: The mathematical theory of wave motion and the electromagnetic theory of light; the propagation of light and the laws of reflection and refraction; The superposition of Waves; Theories, experimental observation and applications of polarization, interference and diffraction; Fourier methods in image formation and diffraction theory; coherence theory and correlation interferometry; the quantum theory of light and probability in wave optics. Teaching: 45 hours of lectures and tutorial classes Assessment: One 1h30 written examination (70% weighting), course assessment + CAT(30% weighting) Textbooks: Optics, 4th edition, by Eugene Hecht, published by Addison-Wesley Publishing Company 1- 4 Brief Introduction The study of optics covers those phenomena involving the production and propagation of light and its interaction with matter. • • • • • • • Euclid published the first systematic writing on optics in 300 B.C. In 16th century, Galilei used the combinations of lens to do astronomy observation. In 1621, Snell discovered the law of refraction. In 1664, Fermat’s principle of least time was proposed, in which the law of reflection and refraction were derived. In 1690, Huygens’ wave theory of light was printed. 1n 1704, Newton’s optics was published. Colors of light and Newton ring were discovered. In 1801, Young performed double-slit interference experiments and principle of interference was proposed. Fig 1.2 Sir isaac Newton (1642-1727) 1- 5 • • • • • • • • • • • In 1808, polarization of light was confirmed. In 1817, Young proposed that light is transverse wave. In 1851, Faraday established an interrelationship between electromagnetism and light. In 1861, Maxwell equations on electromagnetism were presented. In 1888, Hertz verified the existence of electromagnetic waves. In 1900, Planck assumed that discrete energy of radiation field. In 1905 Einstein introduced his special theory of relativity. He asserted that light consisted of particles of energy. In1920s, quantum mechanics established. In 1923, photon concept of light was demonstrated by Compton. In 1960, laser was invented. Now we think that light have both particle and wave manifestations. J. C. Maxwell (1831-1879) Lecture 1 The Mathematics of Wave motion 1.0 Introduction A wave can be described as a disturbance that travels through a medium from one location to another location. In this respect there are fundamental similarities between a pulse travels along a stretched string ( as shown in Fig. 1.1 ), a surface ripple in a cup of tea, and the light reaching us from some remote point in the universe. Fig. 1.1 A wave on a string. 2- 6 2- 7 This chapter will develop some of the mathematical techniques needed to treat wave phenomena in general. We will begin with some fairly simple ideas concerning the propagation of disturbances and from these arrive to the three dimensional differential wave equation. Throughout the study of optics one utilizes plane, spherical and cylindrical waves. Accordingly we will develop their mathematical representations. 2- 8 1.1 One-dimensional waves Imagine some disturbance ψ traveling in the positive x-direction with a constant speed v. The specific nature of the disturbance is at the moment unimportant. It might be the vertical displacement of the string in Fig.1.1, or the magnitude of an electric or magnetic field associated with an electromagnetic wave, or even the quantum-mechanical probability amplitude of a matter wave. Since the disturbance is moving it must be a function of both position and time and can therefore be written as f ( x, t ) (1-1) 2- 9 f ( x, t ) (1-1) The shape of the disturbance at any instant, say t=0, can be found by holding time constant at that value. In this case ( x, t ) t 0 f ( x,0) f ( x), (1-2) represents the shape or profile of the wave at t=0. The process is analogous to “taking” a “photograph” of the pulse as it travels by. For the moment we will limit ourselves to a wave which does not change its shape as it progresses through the space. 2- 10 Fig. 1.2 Moving of wave. Figure 1.2 is a “double exposure” of such a disturbance taken at the beginning and at time t. The pulse has moved along the x-axis a distance vt, but in all other respects remains unaltered. We now introduce coordinate system S’, which travels along with the pulse at the speed v. In this system, ψ is no longer a function of time. As we move along with S’ we see a stationary profile with the same functional form as Eq. (1.2). Here, the coordinate is x’ rather than x so that 2- 11 f (x' ) (1.3) The disturbance looks the same at any value of t in S’ as it did at t=0 in S when S and S’ had a common Origin. It follows from Fig 1.2 that: x' x vt (1.4) So that can ψ be written in terms of the variable associated with the stationary S system as ( x, t ) f ( x vt) (1.5) 2- 12 This then represents the most general form of the one-dimensional wave function, traveling in the positive x-direction. Similarly, if the wave were traveling in the negative x-direction, Eq. (1.5) would become. ( x, t ) f ( x vt), with v 0. (1.6) We may conclude therefore that, regardless of the shape of the disturbance, the variables x and t must appear in the function as a unit, i.e., as a single variable in the form x' ( x vt). 2- 13 we can use the information derived so far to develop the general form of one-dimensional differential wave equation. To that end take the partial derivative of ψ(x,t) with respect to x. Using: x' x vt We have: f x' f x' since 1 (1.7) x x' x x' x If we hold x constant the partial derivative with respect to time is: f x' f v t x' t x' Note: Combining Eqs.(1.7) and (1.8) yields x ' v t (1.8) 2- 14 v t x (1.9) We can anticipate a second-order wave equation with the partial derivatives of Eqs. (1.7) and (1.8). 2 2 f and 2 2 x x' 2 2 f x' f 2 ( ) ( v ) v 2 t t x' x' t t x' 2 Combining these equations, we obtain the one-dimensional differential wave equation 1 2 2 2 x v t 2 2 (1.10) 2- 15 If f(x-vt) and g(x+vt) are separate solutions to Eq. (1.10), the general solution of Eq. (1.10) is C1 f ( x vt) C2 g ( x vt) (1.11) Where C1 and C2 are constants determined by initial conditions of the wave. 2- 16 1.2 harmonic Waves The simplest wave form is a sine or cosine wave, that is called harmonic wave. The profile is ( x, t ) t 0 ( x) A sin kx f ( x) (1.12) Where k is a positive constant known as the propagation number. A is known as the amplitude of the wave. Replace x with x-vt, we have a progressive wave traveling to the positive x-direction with a speed of v ( x, t ) A sin k ( x vt) f ( x vt) (1.13) Holding either x or t fixed results in a sinusoidal disturbance, so the wave is periodic in both space and time. The spatial period is the wave length and is denoted by λ as in fig 1.3. 2- 17 Fig 1.3 A progressive wave at three different time An increase or decrease in x by the amount of λ should leave ψ unaltered, i.e ( x , t ) ( x, t ) In the case of harmonic wave, this is equivalent to altering the argument of the sine by 2 Therefore sin k [( x ) vt] sin [ k ( x vt) 2 ] sin k ( x vt) so k 2 or k 2 / (1.14) 2- 18 In a completely analogous fashion, we can examine the temporal period. The temporal period is the amount of time it takes for one complete wave to pass a stationary observer and is denoted as τ, as in Fig 1.4. Fig 1.4 A harmonic wave Here the repetitive behavior of the wave in time is of interest, hence ( x, t ) ( x, t ) So that ( x, t ) ( x, t ) or sin k ( x v (t )) sin k ( x vt) sin [ k ( x vt) 2 ] 2 so kv 2 or v 2 or (1.15) v 2- 19 The inverse of the period is called the frequency f, which is the number of cycles per unit of time. Thus f 1 (cycles/se c or Hertz) (1.16) There are other two quantities that are often used in the literature of wave motion and these are the angular frequency 2f 2 / (radian/s) (1.17) And the wave number x 1 (1.18) (m-1) The wavelength, period, frequency, angular frequency, wave number and propagation number all describe aspects of the repetitive nature of a wave in space and time. 2- 20 These concepts are equally well applied to waves which are not harmonic as long as each wave profile is made up a regularly repeating pattern (Fig.1.5). Fig. 1-5 Some anharmonic waves. We have thus far defined a number of quantities which characterize various aspects of wave motion. There exist, accordingly, a number of equivalent formulations of the progressive harmonic wave. Some of the most common of these are: 2- 21 ( x, t ) A sin 2 ( x t ) ( x, t ) A sin 2f ( x t) v ( x, t ) A sin k ( x vt) ( x, t ) A sin( kx t ) These waves are all of infinite extent, i.e for any fixed value of t, x varies infinitely. Each wave has a single constant frequency and is therefore said to monochromatic Activity1.2: Determine which of the following describe travelling waves. ( x, t ) A cos 2 (t x) 2 ( y, t ) e ( a 2 b 2 b 2t 2 2 abty) ( x, t ) A sin 2 ( x t )2 a b ( z, t ) A sin( az 2 bt 2 ) 1.3 Phase and Phase velocity 1.3.1 Phase Examine any one of the harmonic wave functions, such as ( x, t ) A sin( kx t ) (1.18) The entire argument of the sine function is known as the phase of the wave, so that ( x, t ) (kx t ) (1.19) At t x0 ( x, t ) t 0 (0,0) 0 x 0 Which certainly a special case. More generally, we can write ( x, t ) A sin( kx t ) Where is the initial phase or epoch angle. (1.20) 2- 22 2- 23 The phase of the disturbance such as given by Eq.(1.20) is ( x, t ) (kx t ) (1.21) And it is obviously a function of x and t. 1.3.2 Phase velocity The partial derivative of ( x, t ) with respect to t holding x constant is the rate of change of phase with time. ( x, t ) t x 1.22 Similarly the rate of change of phase with distance holding t constant is. ( x, t ) x t k 1.23 The phase velocity denoted is derived from Eq1.22 and 1.23 as x t K 2- 24 V 1.24 The speed at which the profile moves is known commonly as the wave velocity or more specifically as the phase velocity The phase velocity carries a positive sign when the wave moves in the direction of increasing x and a negative sign in the direction of decreasing x. 2- 25 1.4 Complex representation The complex-number representation of waves offers an alternative description which is mathematically simpler to work with. The complex number z has the form, z x iy (1.25) i 1. Both r and z are themselves real numbers, and they are the real and imaginary parts of z , respectively. Imaginary y z r θ x Fig. 1-6 Argand diagram Real In terms of polar coordinate (r , ) , we have z r (cos i sin ). 2- 26 (1.26) i The Euler formula, e cos i sin allows us to write z re i r cos ir sin , where r is the magnitude of z, and its phase angle. The magnitude is often denoted and referred to as the modulus or absolute value of the complex number. It is clear that either part of z could be chosen to describe a harmonic wave. It is customary, however, to choose the real part in which case a harmonic wave is written as ( x, t ) Re[ Aei ( kx t ) ] Which is of course ( x, t ) A cos( kx t ) In general, we shall write the wave function as ( x, t ) Aei ( kx t ) Aei . (1.27) 2- 27 The plane wave is perhaps the simplest example of a three-dimensional wave. It exists at a given time, when all the surfaces upon which a disturbance has constant phase form a set of planes, each generally perpendicular to the propagation direction. There are quite practical reasons for studying this sort of disturbance, one of which is that by using optical devices we can readily produce light resembling plane waves. The Mathematical expression for a plane, which is perpendicular to a given vector k and which passes through some point (x0.y0,z0) is rather easy do derive see Fig 1.7 below. z (x,y,z) r r-r0 r0 k (x0,y0,z0) y x Fig. 1-7 A plane wave moving in the k- direction 2- 28 The position vector, in terms of its components in Cartesian coordinates, is r ≡ (x,y,z) Its begins at some arbitrary origin O and ends at the point (x,y,z) which can, for the moment, be anywhere is space. By setting (r-r0).k = 0 1.27 We force (r-r0) to sweep out a plane perpendicular to k, as its endpoint (x,y,z) takes all allowed values. With k ≡ (kx,ky,kz) 1.28 Eq.(1.27) can be expressed in the form kxx + kyy + kzz = a Where Kxx0 + kyy0 + kzz0 = a = constant 2- 29 The most concise form of the equation of a plane perpendicular to k is then just k.r = constant = a The plane is the locus of all points whose projection onto k-direction is a constant. We can now construct a set of planes over which (r ) varies is space sinusoidally, namely (r ) A sin( k r ) , (1.29) (r ) A cos( k r ) , (1.30) Or ik r (r ) Ae , (1.31) For each of these expressions (r ) is constant over every plane defined by k r constant. 2- 30 Since we are dealing with harmonic functions, they should repeat themselves in space after a displacement of λ in the direction of k . Fig.1.8 is a simple representation of this kind of expression. Only few planes have been drawn. The spatially repetitive nature of these harmonic functions can be expressed by. k (r ) (r ), k (1.32) k Where k is the magnitude of k and is a unit vector parallel to it. k In the exponential form, this is equivalent to Fig. 1-8 Wavefronts for a harmonic plane wave. For this to be true, we must have e Ae ik 1 e i 2 ik r Ae k ik ( r ) k Therefore Ae k 2 ik r ik e and k 2 2- 31 The vector k , whose magnitude is the propagation number k (already introduced), is called the propagation vector. At any fixed point in space where r is constant, the phase is constant and so, (r ) is also constant . This means that the planes are motionless. To get things moving, (r ) must be made to vary in time. This can be accomplished by introducing the time dependence in an analogous fashion to that of the one-dimensional wave. Hence i ( k r t ) (r , t ) Ae , With A, (1.33) and k constant. As this disturbance travels along in the k direction we can assign a phase corresponding to it at each point in space and time. At any given time, the surfaces joining all points of equal phase are known as wavefronts or wave surfaces. Note that the wave function will have a constant value at every point on the wavefront only if the amplitude A has a fixed value at every point on the wavefront. In general A is a function of r and may not be constant over all space or even over a wavefront. In the latter case, the wave is said to be inhomogeneous 2- 32 We have examined plane waves with a particular emphasis on harmonic functions. The special significance of these waves is twofold: first, physically, sinusoidal waves can be generated relatively simply by using some form of harmonic oscillator; second, any three-dimensional wave can be expressed as a combination of planes waves, each having distinct amplitude and propagation direction. We can certainly imagine a series of plane waves where the disturbance varies in some fashion other than harmonically. It will be seen in the next section that harmonic plane waves are, indeed, a special case of a more general plane-wave solution. 1.5 Three-dimensional differential wave equation 2- 33 Of all the three-dimensional waves, only the plane wave(harmonic or not) moves through space with an unchanging profile. Clearly, then, the idea of a wave being the propagation of a disturbance whose profile is unaltered is somewhat lacking. This difficulty can be overcome by defining a wave as any solution of the differential wave equation. What we need now is a threedimensional wave equation. We can obtain it by generalizing the one-dimensional expression of Eq 1.10. In cartesian coordinates, the position variables x, y and z must certainly appear symmetrically in three-dimensional equation, a fact to be kept in mind. The wave function ( x, y, z, t ) Ae i (kxxkyy kzz t ) (1.34) is a particular solution of the differential equation we are looking for where kx, ky and kz are the components of k . In analogy with the derivation of Eq 1.10 we can compute the following partial derivatives 2- 34 2 k x 2 x 2 2 k y 2 y 2 Adding the three spatial derivatives and utilizing the fact that kx k y kz 2 2 2 k 2 2 2 2 2 k 2 2 2 x y z 2 2 k z 2 z 2 2 2 t (1.35) Combining this with the time derivative and remembering that v / k we arrive at 2 2 2 1 2 2 2 2 2 x y z v t 2 (1.36) The three-dimensional differential wave equation Equation (1.36) is usually written in a more concise form by introducing the Laplacian operator 2 2 2 2 2 2. x y z 2 (1.37) 2- 35 Where upon it becomes simply 1 2 2 2 . v t 2 (1.38) 2- 36 1.6 Spherical waves Consider now an idealized point light source. The radiation emanating from it streams out radially, uniformly in all direction. The resulting wavefronts are concentric spheres that increase in diameter as they expand out into the surrounding space. The obvious symmetry of the wavefronts suggests that it might be more convenient to describe them mathematically in terms of spherical polar coordinates. In this representation the Laplacien operator is 1 1 1 2 2 2 (r ) 2 (sin ) 2 r r r r sin r sin 2 2 2 Where r, , and x r sin cos (1.39) are defined by r cos P(r , , ) y r sin sin r z r cos r sin cos r sin r sin sin 2- 37 We are looking for a description of spherical waves, waves which are spherically symmetric. i.e ones which are characterized by the fact that they do not depend on and so that (r ) (r , , ) (r ) , The Laplacian of (r ) is then simply 2 (r ) 1 2 ( r ) 2 r r r (1.40) This result can be obtained without being familiar with Eq1.39. Start with the Cartesian form of the Laplacien Eq1.37, operate on the spherically symmetric wave function (r ) and convert each term to polar coordinates, examining only the x-dependence, we have r x r x Since and (r ) (r ) 2 2 r 2 2 r 2 ( ) x 2 r x r x 2 using x 2 y 2 z 2 r 2 2r 1 1 1 x2 r x We have , x 2 r x ( x) x x ( r ) r (1 r 2 ) r x 2 x 2 2 1 x2 2 (1 2 ) and x 2 r r 2 r r r Now having 2 x 2 we form 2 y 2 2 and and on adding we get 2- 38 z 2 2 2 (r ) 2 r r r 2 Which is equivalent to Eq 1.40. This result can be expressed in an slightly different form: 1 2 (r ) (r ) 2 r r 2 1.41 The differential wave equation can then be written as 1 2 1 2 (r ) 2 2 2 r r v t 1.42 Multiplying both sides by r, we obtain 2 1 2 (r ) 2 2 (r ) 2 r v t 1.43 2- 39 Notice that this expression is now just the one-dimensional differential wave equation (Eq1.10), where the space variable is r and the wave function is the product 1.43 is then ( r ) . The solution of Eq r (r , t ) f (r vt) or (r , t ) f (r vt) r 1.44 This represent a spherical wave progressing radially outward from the origin, at a constant speed v, and having an arbitrary functional form f. Another solution is given by (r , t ) g (r vt) r And in this case the wave is converging toward the origin. Activity1.3: Show that the harmonic spherical wave the differential equation 2 1 2 (r ) 2 2 (r ) 2 r v t cos k (r vt) is a solution of r (r , t ) 2- 40 1 . (r 2 ) r 2 r r r x r x 2 2 r 2 2r ( ) 2 2 x r x r x 2 (r ) (r ) 2 ( r ) x2 y2 z2 r 2 x 1 x2 ( 1 ) 2 2 2 2 x r r r r r r x r x 2 r 1 1 1 ( x) x ( ) x 2 r x x r r 2 x 2 2 y 2 2 2 z 2 2 2 2 2 2 . 2 r r r 1 2 (r ) ( r ) r r 2 2 ( r ) (1.39) (1 x2 ) r2 2 2 . 2 r r r 2 1 (r ) 1 2 2 2 r r 2 v t 2 ( r ) 1 2 ( r ) 2 r 2 v t 2 r (r , t ) f (r vt) f (r vt) (r , t ) r 2 (r ) 2- 41