Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Rectiverter wikipedia , lookup
Automatic test equipment wikipedia , lookup
Night vision device wikipedia , lookup
Radio transmitter design wikipedia , lookup
Phase-locked loop wikipedia , lookup
Charge-coupled device wikipedia , lookup
Index of electronics articles wikipedia , lookup
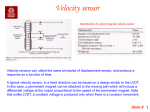
Homework # 9 (STRICTLY EXTRA CREDIT) ENGN 330—Winter 2016 Due: Friday, Apr 13, 2016 Foreword This homework is strictly extra credit. It’s all about accelerometer design. How many points can I earn, you ask? You may earn whichever is greater of i) half of the points you missed on the first exam, or the equivalent of 5 pts on the homework. In essence, you’ll be credited points according to whatever scenario is more beneficial for your overall course grade. Word Problems 1. Accelerometer Design: As we have seen, accelerometers have a great many applications. The fact that they can now be manufacturered and packaged in small dimensions means they are everywhere—airbag systems, bridge monitoring, football helmets, even video game controllers. As we discussed in class, a basic accelerometer consists of a proof mass connected to beams acting as springs. The interdigitated fingers create a capacitor arrangement, wherein the electrical signal output (voltage) is proportional to acceleration (see Figure 1). Note the size scale of the device is on the order of tens of microns. All length dimensions can be reasonably estimated from Fig 1, with exception of the length of the beam (proof mass): Assume it is 400 µm long. In terms of damping, recall that the squeeze film effect is primarily responsible for determining the damping constant. Basically, a thin film of air interacts with the moving pieces to create damping. The damping constant is given as : c= µ LW 3 h3o where µ is the dynamic viscosity of air (≈ 1.98 × 10−5 kg/m s) and ho is the equilibrium distance between the fixed and movable plates of the capacitive fingers. With regard to the squeeze film damping geometrical parameters, see Fig 2. Now, given your training in vibrations, you are in a great position to verify the design of engineers at Analog Devices meets various design criteria! Making a detailed/careful model of the system, please answer the following: (a) What is the natural frequency ωo of the vibrating element in the accelerometer? Carefully show estimations/calculations for mass and spring constant. (b) What is the damping factor ζ for this device? Show all estimates/calculations. (c) What is the maximum frequency for which the measured acceleration can be measured to within 0.2% of the true acceleration? This figure is commonly called the bandwidth of the device. (d) Given this maximum frequency that can be measured to within 0.2% (from part c), what is the maximum possible phase distortion, |φ| that occurs? How severe is this phase shift, will it significantly distort the true acceleration you are trying to measure? To make this concrete, assume the true acceleration is given by ÿ(t) = 0.5 cos(3000t) + 0.5 cos(10000t). 1 Compute the resulting output signal of the accelerometer. On the same plot, overlay the true and measured acceleration. Comment on how well the accelerometer measured the true acceleration. (e) What is the shock resistance of the device? This is basically defined as the maximum magnitude of acceleration the device can withstand before the capacitive fingers start touching other (creating an electrical short). State any assumptions and show all relevant calculations. (f) Thus far, we have only dealt with a 1-D system. That works for measuring vibratinos in one direction. Getting the second dimension is fairly easy given the planar structure of micro-electromechanical systems (MEMS) fabriaction. Just make a second capacitive comb structure perpendicular to the first. How about the 3rd dimension? That takes a bit more work, as one needs ot measure out of plane capacitive changes. For example, see slides 8 and 9 from this very nice presentation on 3-axis accelerometers: http:// ieee-sensors2013.org/sites/ieee-sensors2013.org/files/Serrano_Accels.pdf. Naturally, this also makes for a beautiful N-DOF problem. Specifically, we have motion in the plane and out of the plane. Now build a 2-DOF model to capture translations in the plane in the x-direction and out of the plane in the z-direction. Design a device—such as the LIS3DH that you have used in class,—that can measure up to 16g accelerations to within 0.2% accuracy in BOTH x and y directions. Of course, this means that you need to solve for the natural modes of the device as well. Be sure to derive equations of motion, solve for natural modes (draw them too) and show that your device can make accurate measurements as described above. 2 Figure 1: Accelerometer in concept and design. Upper left: cartoon of fibrating proof mass with interdigitated capactive fingers. Lower Left: zoomed highlighting dimensions of capactive finger arrangement. Lower right: SEM of an actual device manufactured by Analog Devices. Upper right: SEM of a slightly different design. Image sources: http://low-powerdesign.com/donovansbrain/2011/03/27/ mems-motion-sensors-the-technology-behind-the-technology/, http://www.analog.com/ library/analogdialogue/archives/33-01/accel/index.html Figure 2: Squeeze film damping effect between fixed object and movable mass. In this case, the interdigited capacitive fingers cause the damping. Image source: A. Berny, Substrate Effects in Squeeze Film Damping of Lateral Parallel-Plate Sensing MEMS Structures. 3