Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Control system wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Three-phase electric power wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Current source wikipedia , lookup
Signal-flow graph wikipedia , lookup
Negative feedback wikipedia , lookup
Stray voltage wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Scattering parameters wikipedia , lookup
Alternating current wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Two-port network wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power electronics wikipedia , lookup
Voltage regulator wikipedia , lookup
Buck converter wikipedia , lookup
Mains electricity wikipedia , lookup
Regenerative circuit wikipedia , lookup
Dynamic range compression wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Schmitt trigger wikipedia , lookup
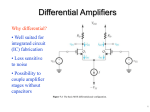
CMOS DIFFERENTIAL AMPLIFIER INTRODUCTION Three problems in single-transistor amplifier stages: Bias and gain sensitive to device parameters (µCox,VT ); sensitivity can be mitigated but often paying price in performance or cost (gain, power, device area, etc.) Vulnerable to ground and power-supply noise (in dense IC’s there is cross-talk, 60 Hz coupling, substrate noise, etc.) Many signal sources exhibit ”common-mode” drift that gets amplified. SOLUTION Represent signal by difference between two voltages: Differential amplifier: amplifies difference between two voltages rejects components common to both voltages DIFFERENTIAL AMPLIFIER definitions Common mode rejection ratio (CMRR) AvD CMRR AvC CMRR is a measure of how well the differential amplifier rejects the common-mode input voltage in favor of the differential-input voltage. Input common-mode range (ICMR) The input common-mode range is the range of common-mode voltages over which the differential amplifier continues to sense and amplify the difference signal with the same gain. Typically, the ICMR is defined by the common-mode voltage range over which all MOSFETs remain in the saturation region. Output offset voltage (VOS(out)) The output offset voltage is the voltage which appears at the output of the differential amplifier when the input terminals are connected together. Input offset voltage (VOS(in) = VOS) The input offset voltage is equal to the output offset voltage divided by the differential voltage gain. VOS VOS (out ) AvD Why Differential? One of the most widely used analog block High-performance mixed-signal circuits Outline: Review of single-ended and differential operation Description of basic differential pair Large signal and small signal analyses Common Mode Rejection Ratio (CMRR) Concept, formulation Diff pair with diode-connected and current-source loads Gilbert cell Single-Ended and Differential Operation Single-ended Signal measured with respect to a fixed potential (e.g. gnd) Differential Signal measured btwn 2 nodes with equal and opposite signal excursions around a fixed potential (see figure above) Dotted line -> common-mode level SE & Diff - discussed Diff circuit more immune to noise e.g. Power Supply Noise Single-Ended: Supply varies by DV Vout changes by approx. same amount Differential (symmetric circuit) Noise on supply affects VX and VY, not VX-VY (Vout) High-Noise Immunity – rejects common signal (noise) Advantages of Differential Circuit 2 adjacent lines one carries small, sensitive signal one carries large clock waveform Capacitive coupling btwn L1 and L2 Transitions on L2 corrupt signal on L1 Sensitive signal distributed as 2 equal magnitude and opposite phases Clock placed midway, btwn the 2 Clock transition disturbs differential phases by equal amounts -> difference intacts Diff output not corrupted -> rejects common-mode noise Another advantage of diff amp. In a single CS amplifier, the maximum swing is VDD-(VGS-VTH) In a differential pair it can be shown that the swing of VX-VY can reach 2[VDD-(VGS-VTH)]. Basic Differential Pair Amplify diff signal. Mechanism? Concept: incorporate two identical SE signal paths to process the two phases The resulting circuit offers advantages of diff signaling: e.g. High rejection of supply noise, high output swings, etc. What if input CM level changes? Bias currents of M1 and M2 changes -> vary gm of devices (hence the gain) -> vary output CM level (lowers maximum allowable output swings) Example: If input CM is excessively low (b): Min values of Vin1 and Vin2 may turn off M1 and M2 • Lead to severe clipping at output How to solve the problem? Diff Pair (cont.) Add current source ISS Makes ID1 + ID2 independent of Vin,CM ID1=ID2=ISS/2 when Vin1=Vin2, output CM level = VDD-RDISS/2 Main function: suppress effect of input CM level variations on operation of M1 and M2, and output level Diff Pair – Qualitative Analysis Assume - < Vin1–Vin2< Case 1: Vin1 more –ve than Vin2 M1 off, M2 on -> ID2=ISS Vout1 = VDD Vout2 = VDD – ISSRD2 Case 2: As Vin1 brought closer to Vin2 M1 gradually turns on Draws a fraction of ISS from RD1 (ISS=ID1+ID2), lowering Vout1 Eventually, Vin1 more +ve than Vin2 ISS flows through M1 (on), none through M2 (off) Vout2 = VDD Vout1 = VDD-ISSRD1 See diagram above for the complete transition Cont’d … 2 important characteristics revealed from prev analysis Char 1: output’s maximum and minimum levels well-defined (VDD and VDD-RDISS), independent of input CM level Char 2: small-signal gain (slope of Vout1-Vout2 vs. Vin1-Vin2) is maximum for Vin1=Vin2 Gradually falling to zero as |Vin1-Vin2| increases • i.e. circuit becomes more nonlinear as input voltage swing increases • Circuit is in equilibrium when Vin1=Vin2 SMALL-SIGNAL DIFFERENTIAL VOLTAGE GAIN For |ΔVin|≈0 (sufficiently small) we have: | AV | DVout W Gm,max RD nCox I SS RD g m RD DVin L where gm is that of a NMOS with a current of ISS/2 Single-ended Differential Voltage Gain AV , SE gm VX RD Vin1 Vin2 2 AV , SE gm VY RD Vin1 Vin2 2 Example What is the required input CM for which RSS sustains 0.5 V? Calculate RD for a differential gain of 5 What happens at the output if the input CM level is 50 mV higher than the value calculated in (a)? Let VDD=3V, (W/L)1=(W/L)2=25/0.5 µnCOX=50µA/V2, VTH=0.6V, λ=0, γ=0, RSS=500Ω NMOS Differential Amplifiers Small Signal Analysis g m 2 K (VGS Vt ) 2 KI Q n C ox W (VGS VT ) L vod Ad g m RD vid Ac voc g m RD vic 1 g m 2 RSS Ad CMRR Ac Common-Mode Gains We have seen two types of commonmode gain: AV,CM : Single-ended output due to CM signal. AV,CM-DM : Differential output due to CM signal. AV ,CM VX VY Vin,CM Vin,CM AV ,CM DM VX VY Vin,CM Common-Mode Rejection Ratio (CMRR) Definitions CMRR CMRRSE ADM | | ACM CMRR CMRRdiff | ADM ACM DM | In both cases we want CMRR to be as large as possible, and it translates into small matching errors and RSS as large as possible MOS Loads (a) Diode-connected load (b) Current-Source load MOS Loads: Analysis Method Differential Analysis: Use half-circuit method, with source node at virtual ground. Common-Mode Analysis: Again use half-circuit method, with appropriate accommodation for parallel transistors, and for RSS. MOS Loads: Differential Gain Formulas 1 AV ,diff g mN ( g mP || roN || roP ) g mN n (W / L) N g mP p (W / L) P AV ,diff g mN (roN || roP ) Problems with Diode-connected MOS Loads Tradeoff among swing, gain and CM input range: In order to achieve high gain, (W/L)P must be sufficiently low. Therefore PMOS overdrive voltage must be sufficiently low. As a result CM signal range is reduced. Overcoming Diode-connected Load swing problem for higher gains: Use PMOS current sources which reduce gm of diode-connected MOS, instead of lowering (W/L)P of load. Gain can be increased by factor of 5. Problems with Current-Source MOS Loads In sub-micron technologies, it’s hard to obtain differential gains higher than 1020. Solution to low-gain problem: Cascoding AV ,diff g m1[( g m3ro 3ro1 ) || ( g m5 ro 5 ro 7 )] Gilbert Cell Combine 2 properties of diff pair to develop a versatile building block Small-signal gain of diff pair = f(tail current) 2 transistors in a diff pair provides a means of steering tail current to one of two destinations Variable Gain Amplifier (a) Used in a system where signal amplitude may experience large variations and requires inverse changes in gain Vcont defines tail current hence the gain Max gain = f(voltage headroom limitations, device dimensions) Cont’d… 2 diff pairs that continuously vary gain from a –ve to +ve value Amplify inputs by opposite gains A1=-gmRD, A2=gmRD, A1=f(Vcont1), A2=f(Vcont2) A1 and A2 follows the changes in I1 and I2 How to combine the outputs into a single final output? Cont’d… Sum the 2 outputs Produce Vout = Vout1 + Vout2 = A1Vin + A2Vin How to realize with transistors? Note: Vout1=RDID1-RDID2 Vout2=RDID4-RDID3 \ Vout1+Vout2=RD(ID1+ID4)-RD(ID2+ID3) We don’t add voltages, but add currents by shorting the corresponding drain terminals -> Isum generate output voltage e.g. I1=0, Vout=gmRDVin; I2=0 -> Vout=-gmRDVin; I1=I2 -> gain=0 To change amplifier gain monotonically, I1 and I2 must vary in opposite directions HOW to change amplifier gain/vary the currents in opposite directions? Cont’d… Recall diff pair… yes, a diff pair Observation: For large |Vcont11-Vcont2| all of tail current steered to one of top diff pair • Gain -> most positive or most negative value Redraw the circuit -> GILBERT CELL Note: Vin and Vcont are interchangeable and still works as a VGA VOU T kVinVcont