Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
TinyOS Tutorial
Jianping Wang
(merge several tutorials found online)
TinyOS
• TinyOS is an open source operation system
designed for wireless embedded sensor network. It
is not a operation for general purpose.
Official website: http://www.tinyos.net/
• It features a component-based architecture which
enables rapid development while minimizing code
size.
• Supported platforms include Linux RedHat9.0,
Windows 2000/XP with Cygwin.
TinyOS versions
• 1.0 (Oct 2002)
• 1.1 (Sep 2003)
• 1.1.1 (Nov 2003) add a new routing module MintRoute,
a new ADC interface.
• 1.1.3 (Jan 2004) add B-Mac, a new MAC layer w/
CSMA with collision, etc.
• 1.1.4 (Feb 2004) add Tython, which is a TOSSIM (a
TinyOS simulator) scripting environment.
• 1.1.5 (Mar 2004) make improvements and bugs fixes to
Tython.
• 1.1.6 (May 2004) support PageEEPROM component, a
new make system, for PC platform.
• 1.1.7 (July 2004) supports MicaZ and Telos.
• 1.1.8 (Oct 2004) support TinyOS network programming
components: Delug, NetProg and TOSBoot.
Serial-line communication in TinyOS
• The protocol is based on the PPP in HDLC-like framing
described in RFC-1662.
• Components:
• FramerM – provides core framing protocol
• FramerAcm – implements ACK processing for inbound packets
• UARTFramedPacket – A configuration component incorporating FrameM
and FrameAckM
• Applications
• TOBase (apps/TOBase) – simple bridge between serial and wireless
chanels
• TransparentBase (apps/TransparentBase) – bridge identical to TOBase
but doesn’t check group ID
• GenericBase (apps/GenericBase) – legacy bridge w/o framing or flow
control
• Host Tools
• net.tinyos.packet.PacketSource (Interface)
• Net.tinyos.packet.PhoenixSource (Class)
• Net.tinyos.SerialForwarder (Application)
Different platforms need
different solutions
Capabilities
Highly constrained
(memory, cpu,
storage, power)
Solutions: TinyOS,…
StarGate
MK - II
Software: atmel
tools, java, perl
MICA Mote
Spec
Size, Power Consumption, Cost
Environment/Tools
Microphone
Sounder
Magnetometer
1.25 in
Temperature
Sensor
Light
Sensor
2.25 in
Accelerometer
Environment/Tools
• download TOS distribution and Java JDK from:
– http://www.tinyos.net/download.html
• directory structure, after installation:
–
–
c:\tinyos\cygwin – installation directory
\opt\tiny-1.x\contrib\xbow\apps {cnt_to_leds, cnt_to_rfm,
sense, …}
–
\opt\tiny-1.x\docs {connector.pdf, tossim.pdf, …}
–
\opt\tiny-1.x\tools {toscheck, inject, verify, …}
–
\opt\tiny-1.x\tos
{shared/system components, …}
Environment/Tools
• verify the software installation:
– ~\tools\toscheck.exe
• verify the hardware is working:
–
–
–
–
~\apps\mica_hardware_verify\make mica
install the mote into the board. Red LED on.
~\apps\mica_hardware_verify\make mica install.1
~\apps\mica_hardware_verify\java hardware_check COM1
Programming TinyOs
• TinyOS 1.0 libraries and components are written in
an extension of C, called nesC
• Applications are too!
– just additional components composed with the
OS components
• Provides syntax for TinyOS concurrency and storage
model
– commands, events, tasks
– local frame variable
• Rich Compositional Support
– separation of definition and linkage
– robustness through narrow interfaces and reuse
– interpositioning
TinyOs Components (1)
• A TinyOS application consists of one or more
components.
• A component provides and uses interfaces.
– A interface defines a set of functions called
commands.
• There are two types of components in nesC:
– Modules. It implements application code.
– Configurations. It assemble other components
together, called wiring.
TinyOs Components (2)
• Component interface:
–
–
–
–
commands accepts (implemented)
commands uses
events accepts (implemented)
events uses
• Component implementation
– functions that implement interface
– frame: internal state
– tasks: concurrency control
Messaging Component
Internal Tasks
Commands
Internal State
Events
TinyOs Components (3)
• A component specifies a set of interfaces by which it is connected to
other components
– provides a set of interfaces to others
– uses a set of interfaces provided by others
• Interfaces are bi-directional
– include commands and events
• Interface methods are the external namespace of the component
provides
provides
interface StdControl;
interface Timer:
uses
interface Clock
StdControl
Timer
Timer Component
Clock
uses
TinyOs Concurrency Model
• TinyOS executes only one program consisting of
a set of components.
• Two type threads:
– Task
– Hardware event handler
• Tasks are scheduled to executed and put into a
single queue. A task doesn’t preempt another
task.
• Hardware event handlers are executed in
response to a hardware interrupt. They may
preempt the execution of a task and other
hardware handler.
– The events and commands executed as part of a hardware
event handler must be declared as async.
Issues/Comments
• System perspective:
– simplistic FIFO scheduling -> no real-time guarantees
– bounded number of pending tasks
– no “process” management -> resource allocation
problematic, e.g. shared resources
– software level “bit manipulation”. HW implementation
can provide speed-up and power saving
TinyOS Application
• TinyOS (TOS) = application/binary image, executable on an
ATmega processor
• event-driven architecture
• single-shared stack
• no kernel, no process management, no memory management,
no virtual memory
• 2-level scheduling
• simple FIFO scheduler, part of the main
5/5/2003
MobiSys Tutorial, San Francisco
15
application
Application = Graph of Components
Route map
router
sensor appln
packet
Radio byte
bit
Radio Packet
byte
Active Messages
RFM
Serial Packet
UART
Temp
ADC
photo
SW
HW
clocks
Example: ad hoc, multi-hop
routing of photo sensor
readings
3450 B code
226 B data
Graph of cooperating
state machines
on shared stack
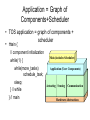
Application = Graph of
Components+Scheduler
• TOS application = graph of components +
scheduler
• main {
// component initialization
while(1) {
while(more_tasks)
schedule_task;
sleep;
} // while
} // main
Main (includes Scheduler)
Application (User Components)
Actuating Sensing Communication
Communication
Hardware Abstractions
TOS Execution Model
data processing
application comp
message-event driven
active message
event-driven packet-pump
packet
• commands request action
– ack/nack at every boundary
– call cmd or post task
• events notify occurrence
– HW intrpt at lowest level
– may signal events
– call cmds
– post tasks
• Tasks provide logical concurrency
– preempted by events
Radio Packet
crc
bit
byte
event-driven byte-pump
Radio byte
encode/decode
event-driven bit-pump
RFM
Dynamics of Events and
Threads
bit event filtered
at byte layer
bit event =>
end of byte =>
end of packet =>
end of msg send
thread posted to start
send next message
radio takes clock events to detect recv
Event-Driven Sensor Access
Pattern
SENSE
command result_t StdControl.start() {
return call Timer.start(TIMER_REPEAT, 200);
}
event result_t Timer.fired() {
return call sensor.getData();
Timer
Photo
}
event result_t sensor.dataReady(uint16_t data) {
display(data)
return SUCCESS;
}
•
•
•
•
•
clock event handler initiates data collection
sensor signals data ready event
data event handler calls output command
device sleeps or handles other activity while waiting
conservative send/ack at component boundary
LED
TinyOS Commands and Events
{
...
status = call CmdName(args)
...
}
event EvtName)(args) {
...
return status;
}
command CmdName(args) {
...
return status;
}
{
...
status = signal EvtName(args)
...
}
TinyOS Execution Contexts
events
Tasks
commands
Interrupts
Hardware
• Events generated by interrupts preempt
tasks
• Tasks do not preempt tasks
• Both essential process state transitions
TASKS
• provide concurrency internal to a component
– longer running operations
• are preempted by events
• able to perform operations beyond event context
• may call commands
• may signal events
• not preempted by tasks
{
...
post TskName();
...
}
task void TskName {
...
}