Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
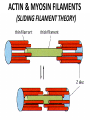
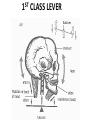
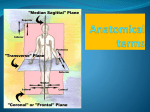
REC 3010 HUMAN MOVEMENT THE STRUCTURE OF MUSCLE CONNECTIVE TISSUE/FASCICLES AGONIST AND ANTAGONIST MUSCLES Agonist-Antagonist Muscles Upper Trapezius Levator Scapulae Middle Trapezius Rhomboid Minor Serratus Anterior Rhomboid Major Lower Trapezius The Upper Trapezius and the Lower Trapezius have an Agonist-Antagonist relationship Agonist-Antagonist Muscles Glenohumeral joint Greater Tubercle Lesser Tubercle Subscapularis Supraspinatus Infraspinatus Teres Minor The Subscapularis and the Supraspinatus/Infraspinatus/Teres Minor have a Agonist Antagonist relationship The muscles of the Abdominals are opposite the Lower Back External Abdominal Oblique Pectoralis Major Rectus Abdominal Internal Abdominal Oblique Transverse Abdominis Tendinous Transcriptions Longissimus Spinalis Iliocostalis The Transverse Abdominals are opposite each other There are some interesting Agonist Antagonist relations between the Hip Extensors and the Hip Flexors Semimembranosus Semitendonosus Biceps Femorus Vastus Lateralis Vastus Medialis Vastus Intermedialis Vastus Lateralis AGONIST/ANTAGONIST STRENGTH RATIOS ACTIN & MYOSIN FILAMENTS (SLIDING FILAMENT THEORY) ACTIN & MYOSIN FILAMENTS SARCOMERE DIAGRAM MYOSIN CROSS BRIDGE IN ACTION MUSCLE CONTRACTION/RELAXATION NEUROMUSCULAR JUNCTION PRODUCING A MUSCLE ACTION ISOTONIC CONTRACTION *CONCENTRIC CONTRACTION -muscle acts as moving force -muscle shortens creating tension -motion is created *ECCENTRIC CONTRACTION -muscle acts as a resistive force -external force exceeds contractive force -muscle lengthens & motion is slowed ISOMETRIC CONTRACTION - -muscle tension is created with no movement -resistance comes from opposing muscle, gravity or an immoveable object -motion is prevented by equal opposing forces WHICH MUSCLES ACT AS • There are three lever classes. • The body operates primarily as a series of third-class levers, with only a few first- and secondclass levers. – Force (F) acts between the axis (X) and the resistance (R) ST 1 & ND 2 ? LEVERS OF THE BODY 1ST CLASS LEVER 2ND CLASS LEVER 3RD CLASS LEVER ST 1 CLASS LEVER ND 2 THE WEIGHT OF THE BODY PROVIDES THE REISISTANCE LOAD CLASS LEVER WHEN THE CALF CONTRACTS IT PROVIDES THE EFFORT FORCE THE FOOT ACTS AS THE RESISTANCE ARM THE BALL OF FOOT ACTS AS FULCRUM OR AXIS OF ROTATION 7 Principles of Biomechanics Principle #1: Stability The lower the center of mass the larger the base of support the closer the center of mass to the base of support & the greater the mass The more stability increases Example: Sumo Wrestler Principle #2: Maximum Effort The production of maximum force requires the use of all possible joint movements that contribute to the tasks objective Example: Bench Press or Golf Principle #3: Maximum Velocity The production of maximum velocity requires the use of joints in order from largest to smallest Example: Slap Shot or Golf Drive Principle #4: Linear Motion The greater the applied impulse the greater the increase in velocity Example: Slam Dunking in Basketball Principle #5: Linear Motion Movement usually occurs in the direction opposite of the applied force Example: High Jumper, Runners & Cyclists Principle #6: Angular Motion Angular motion is produced by the application of a force acting at some distance from the axis, that is, by torque The production of Angular Motion Example: Baseball Pitcher Principle #7: Angular Momentum Angular Momentum is constant when an athlete or object is free in the air. Once an athlete is airborne, he or she will travel with a constant angular momentum. Example: Divers Anatomical, Directional, and Regional Terms Movement of the Skeleton • There are three main types of joints: – Fibrous joints – Cartilaginous joints – Synovial joints • Synovial joint movement occurs within the three planes of motion: sagittal, frontal, and transverse. – Movement occurs along the joint’s axis of rotation, where the plane of movement is generally perpendicular to the axis. – Uniplanar joints (hinge joints) allow movement in only one plane. – Biplanar joints allow movement in two planes that are perpendicular to each other. – Multiplanar joints allow movement in all three planes. Movement in the Sagittal Plane The sagittal plane runs anterior-posterior, dividing the body into left and right sections. Movements that involve rotation about a mediolateral axis occur in the sagittal plane. Examples include: – – – – Flexion Extension Dorsiflexion Plantarflexion Movement in the Frontal Plane • • The frontal plane runs laterally, dividing the body into anterior and posterior sections. Movements that involve rotation about an anteroposterior axis occur in the frontal plane. Examples include: – – – – – – Abduction Adduction Elevation Depression Inversion Eversion Movement in the Transverse Plane The transverse plane runs horizontally, dividing the body into superior and inferior sections. Movements that involve rotation about a longitudinal axis occur in the transverse plane. Examples include: – – – – – Rotation Pronation Supination Horizontal flexion Horizontal extension Movement of Synovial Joints Angular Movements *Flexion *Extension *Abduction *Adduction Circular Movements *Circumduction *Rotation Movements Special to the Shoulder *Protraction *Retraction *Elevation *Depression Movements Special to the Ankle *Inversion *Eversion *Dorsiflexion *Planterflexion Anatomical Position