Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Finite element method wikipedia , lookup
Horner's method wikipedia , lookup
Dynamic substructuring wikipedia , lookup
Linear least squares (mathematics) wikipedia , lookup
Matrix multiplication wikipedia , lookup
Newton's method wikipedia , lookup
Root-finding algorithm wikipedia , lookup
System of polynomial equations wikipedia , lookup
Gaussian elimination wikipedia , lookup
Least squares wikipedia , lookup
ENT 258 Numerical Analysis
Laboratory Module
EXPERIMENT 4
SYSTEMS OF SIMULTANEOUS LINEAR ALGEBRAIC EQUATIONS
1.0 OBJECTIVE
To understand matrix and vector operation in MATLAB and applying them to solve
systems of linear equations
2.0. EQUIPMENT / APPARTRUS
Computers and Matlab program.
3.0 INTRODUCTION & THEORY
Many practical applications of engineering and science, quantitative problem of
business and economics, and mathematical models of social sciences lead to a system of
linear algebraic equations. A set of simultaneous linear algebraic equations can be
expressed in a general form as
a11x1 a12x2 ...a1nxn b1
a21x1 a22x2 ...a2nxn b2
.
(4.1)
.
an1x1 an2x2 ...annxn bn
Where the coefficients aij(i = 1, 2, …, n;j = 1, 2, …., n) and the constants bi (i= 1, 2, …., n)
are known, xi(i = 1, 2, . . ., n) are the unknowns, and n is the number of equations.
Equation (4.1) can be expressed in matrix form as
Ax b,
(4.2)
where the n x n coefficient matrix [A], the n-component constant vector b and the ncomponent vector of unknown x are given by
1
ENT 258 Numerical Analysis
a
11
a
21
.
A
.
.
n
1
a
Laboratory Module
a
b
x
12 . . . a
1
n
1
1
a
b
x2
22 . . . a
2
n
2
. . . . .
.
.
,x
.
,b
. . . . . . .
. . . . . . .
a
b
xn
n
2 . . . a
nn
n
Several methods can be used for solving systems of linear algebraic equations,
Eq. (4.1). These methods can be divided into two types: direct and iterative. Direct
methods are those that in the absence of round-off and other errors will yield the exact
solution in a finite number of elementary arithmetic operations.
Some of the commonly used direct and iterative methods are as follows:
Direct (elimination) methods
1. Gauss elimination method
2. Gauss-Jordan method
3. LU decomposition method
Indirect (iterative) methods
1. Jacobi method
2. Gauss-Siedel method
3. Relaxation method
3.1. Solving Linear Algebraic Equation with MATLAB function
MATLAB provides two direct ways to solve systems of linear algebraic equations. The
most efficient way is to employ the backslash, or ‘left-division,’ operator as in
>> x = A\b
The second is to use matrix inversion:
>> x = inv (A)*b
Example 4.1
150
100
0
x
588
.
6
1
100
150
50
x
686
.
7
2
0
50
50
x
784
.
8
3
>> A=[ 150 -100 0; -100 150 -50; 0 -50 50];
>> b=[588 686.7 784.8]';
>> x=A\b
Using left-division function
x=
41.1900
55.9050
71.6010
>> x=inv(A)*b
Using inverse function
2
ENT 258 Numerical Analysis
Laboratory Module
x=
41.1900
55.9050
71.6010
3.2. Solving Linear Algebraic Equation with MATLAB programming
3.2.1 Gauss Elimination Method
The most frequently used direct method for the solution of simultaneous algebraic linear
equations is the Gauss elimination method. This method is based on the principle of
reducing a set of n equations in n unknown to q equivalent upper triangular form. If the
original equations are given by Esq. (4.1), the upper triangular form of equations appears
as follows:
a
x
a
x
a
x
...
a
x
c
11
1
12
2
13
3
1
n
n
1
'
'
'
'
a
x
a
x
...
a
x
c
22
23
2
n
2
2
3
n
'
'
'
a
x
...
a
x
c
33
3
n
3
3
n
(4.3)
.
.
'
'
'
a
x
a
x
c
n
1
,
n
1
n
1
,
n
n
1
n
1
n
a'nnxn c'n
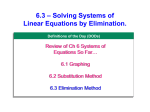
The reduction of Eq.(4.1) to the upper triangular form of Eq.(4.3), known as forward
elimination, is made such that the solution given by Eq.(4.3) is same as that of Eq. (4.1).
The solution of Eq.(4.3) can be determined in a simple manner using a process known as
back substitution. Since the last equation of system (4.3) contains only one unknown, xn, it
is solved first. The remaining unknowns are found by using back substitution starting with
the variable xn and proceeding backwards until the variable x1 is determined.
Figure 2:The two phases of Gauss elimination: forward elimination and back substitution
3
ENT 258 Numerical Analysis
Laboratory Module
3.2.1.1 Basic Algorithm
Gauss Elimination
Input
A, C
Forward
Elimination
(Poviting)
Back
Substitution
Output Solution
Vector, x
Stop
Figure 1: Flowchart for Gauss Elimination
4
ENT 258 Numerical Analysis
Laboratory Module
Flowchart Forward Elimination
Form the A and B in
augment form [A | C]
p = 1,..,N-1
Loop over all rows
in matrix, except last
Find the max value in all
rows (p) and column (p)
Interchange row p and column p
k = p+1:N
mkp = Akp/App
Akp = Akp –mkp*App
Loop over all rows
below the diagonal position (p,p)
Compute multiplies for row (k)
and column (p)
k are the numbers of
iterations for row
No
k>N
Yes
No
p>N-1
Update coefficient for row (k)
and column (p)
Yes
Back
Substitution
5
ENT 258 Numerical Analysis
Laboratory Module
Flowchart Back Substitution
XN = CN/ANN
i = N-1:-1:1
N
X i Ci Aik X k / Aii
k i 1
Compute last unknown
Loop backwards over all rows
and columns
Compute (i)th unknown
No
i< 1
Yes
Stop
6
ENT 258 Numerical Analysis
Laboratory Module
Example-4.3
Use Gauss Elimination to solve
2
.51
x
1
.48
x
4
.53
x
5
.56
1
2
3
1
.48
x
0
.93
x
1
.30
x
0
.75
1
2
3
2
.68
x
3
.04
x
1
.48
x
1
.84
1
2
3
using MATLAB M-file.
Procedure-MATLAB Programming
1. Start a new MatLab file by clicking on File, New and M-file that opens an empty file in
the Editor/Debugger window.
2. Write the program given below in M-file
function X = gauss(A,B)
%Input - A is an N x N nonsingular matrix
%B is an N x 1 matrix
%Output- X is an N x 1 matrix containing the solution to AX=B.
[N N]=size(A);
C=zeros(1,N+1);
%matrix zero
%Form the augment matrix:Aug=[A| B]
Aug=[A B];
%Forward Elimination process for column p
for p=1:N-1
%Partial pivoting for column p
[Y,j]=max(abs(Aug(p:N,p))); %function max is used to determine the largest available
%coefficient in the column.
%Interchange row p and j
C=Aug(p,:);
Aug(p,:)=Aug(j+p-1,:);
Aug(j+p-1,:)=C;
for k=p+1:N
m=Aug(k,p)/Aug(p,p);
Aug(k,p:N+1)=Aug(k,p:N+1)-m*Aug(p,p:N+1);
end
end
%Back Substitution
X=zeros(N,1)
X(N)=Aug(N,N+1)/Aug(N,N);
for k=N-1:-1:1
%the last value of x
7
ENT 258 Numerical Analysis
Laboratory Module
X(k)=(Aug(k,N+1)-Aug(k,k+1:N)*X(k+1:N))/Aug(k,k);
disp(X);
end
3. Click on Save As to save it as gauss.m.
4. Define matrixes A,B in Command Window.
5. To see how it works, type gauss(A,B) in MatLab Command Window.
The built-in MATLAB function max is used to determine the largest available
coefficient in the column below the pivot element. The max function has the
syntax
[ Y,j ] = max (A)
where Y is the largest element in the vector (A), and j is the index
corresponding to that element.
3.2.2 Gauss-Seidel Iteration Method
The Gauss-Seidel method is the most commonly used iterative method for solving linear
algebraic equations. Assume that we are given a set of n equations:
Ax
b
Suppose that for conciseness we limit ourselves to a 3 x 3 set of equations. If the diagonal
elements are all nonzeros, the first equation can be solved for x1, the second for x2, and
the third for x3 to yield
j
1
j
1
b
a
x
a
x
1
12
2
12
3
x
a
11
j
1
(4.4)
j
1
b
a
x
a
x
2
21
1
23
3
x
a
22
(4.5)
b
a
x
a
x
j
3
31
1
32
2
x
3
a
33
(4.6)
j
j
2
j
j
where j and j-1 are the present and previous iterations.
To start the solution process, initial guesses must be made for the x’s. A simple
approach is to assume that they are all zero. These zeros can be substituted into Eq.(4.4),
which can be used to calculate a new value for x1
b1
. Then we substitute this new
a11
value of x1 along with the previous guess of zero for x3 into Eq. (4.5) to compute a new
value for x2. The process is repeated for is repeated for Eq. (4.6) to calculate a new
8
ENT 258 Numerical Analysis
Laboratory Module
estimate for x3. Then we return to the first equation and repeat the entire procedure until
our solution converges closely enough to the true values. Convergence can be checked
using the criterion that for all i,
xi xi
j
Error
xi
j 1
j
100% esp
Before developing an algorithm, let us first recast Gauss-Siedel in a form that is
compatible with MATLAB’s ability to perform matrix operation. This is done by expressing
Eq. (4.4) to (4.6) as
new
x1
b1
a11
a olda
13 old
12
x
2 x
3
a
a
11
11
a new
newb
x
2 21
x
2
1
a
22 a
22
a23 old
x3
a22
b
a
new
new
new
3 a
31
32
x
3 x
1 x
2
a
a
a
33
33
33
Notice that the solution can be expressed concisely in matrix form as
x
dC
x
where
b1 / a11
d
b2 / a22
b / a
3 33
and
/a
/a
0 a
12
11a
13
11
C
a
/a
0 a
/a
21
22
23
22
a
/
a
a
/
a
0
3133 3233
In general form of Gauss-Seidel iteration can be expressed as
1
n
i
(
k
1
) 1
k
1
k
x
b
a
x
a
x
i = 1,2, …,n , k = 1,2,
i
i
ij
j
ij
j
a
1
j
i
1
ii
j
9
ENT 258 Numerical Analysis
Laboratory Module
Flowchart for Gauss Seidel
Start
A,B,P,esp,n
Yes
k=1
k>n
STOP
k = k +1
k=
1
No
Yes
i=1
i>N
i = i+1
i =1
No
i
1
n
b
a
x
a
x
i
ij
j
ij
j
j
1
j
j
1
k
1
x
i
a
ii
k
1
k
abs(xik – xik-1/xik) *100<
esp
No
Yes
STOP
Example-4.4
Solve the following equations using the Gauss-Seidal iteration method:
8x1 x2 x3 8
x1 7x2 2x3 4
2x1 x2 9x3 12
with initial guesses are P0 = 0 = (0, 0, 0), convergence criterion is esp = 0.5 and, number
of iterations are n = 10. Use MATLAB M-file to solve this system of equations.
1
0
ENT 258 Numerical Analysis
Laboratory Module
Procedures -MATLAB Programming
1. Start a new MatLab file by clicking on File, New and M-file that opens an empty file in
the Editor/Debugger window.
2. Write the program given below in M-file
function x = Gauss_Seidel(A,B,P,esp,n)
% input = A,B,P,esp,n
%P=initial values
%esp=error
%n=number of iterations needed
%output=x
N=length(B);
disp('
k
x1
x2
x3')
for k=1:n
for j=1:N
if j==1
X(1)=(B(1)-A(1,2:N)*P(2:N))/A(1,1);
elseif j==N
X(N)=(B(N)-A(N,1:N-1)*(X(1:N-1))')/A(N,N);
else
X(j)=(B(j)-A(j,1:j-1)*X(1:j-1)'-A(j,j+1:N)*P(j+1:N))/A(j,j);
end
end
err=abs((X'-P)/X’)*100;
P=X';
if (err<esp)
break
end
disp([k
X]);
end
3. Click on Save As to save it as Gauss_Seidel.m.
4. Define the values of A,B,P,esp,n in Command Window
5. To see how it works, type Gauss_Seidel(A,B,P,esp,n) in MatLab Command
Window.
1
1
ENT 258 Numerical Analysis
4.0
Laboratory Module
LAB ASSIGNMENT
QG
cG0
cG1
cG2
cG3
cG4
cG5
cL1
cL2
cL3
cL4
cL5
QL
QG
cL6
QL
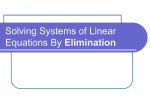
Figure 1
Figure 1 depicts a chemical exchange process consisting of a series of reactors in which a
gas flowing from left to right is passed over a liquid flowing from right to left. The transfer
of a chemical from the gas into the liquid occurs at rate that is proportional to the
difference between the gas and liquid concentrations in each reactor. At steady state, a
mass balance for the first reactor can be written for the gas as
QG cG 0 QG cG1 D(c L1 cG1 ) 0
and for the liquid as
QL c L 2 QL c L1 DcG1 c L1 0
where QG and Q L are the gas and liquid flow rates, respectively, and D = the gas-liquid
exchange rate. Similar balances can be written for the other reactor. Solve for the
concentration given the following values: QG = 2, Q L = 1, D = 0.8, cG 0 = 100, c L 6 = 10.
Use
a) Gauss-Seidel iteration method with initial guesses are 0 and esp = 0.5%
b) Gauss Elimination method
Data Analysis
1) Fill in the Table 1 & 2 for method (a).
2) Fill in the Table 3 for method (b).
3) Substitute your both results back into the original equations to check your solution.
1
2
ENT 258 Numerical Analysis
5.0
Laboratory Module
DATA & RESULTS
Assignment 1
Lab Name
: …………………..
Pc Number : …………………..
Folder Name : …………………..
Mathematical Model
Equation Form for each of reactor
Matrix Form
1
3
ENT 258 Numerical Analysis
Laboratory Module
Table 1
Gas
k(iteration)
cG1
cG2
cG3
cG4
cG5
cL1
cL2
cL3
cL4
cL5
1
.
.
.
.
.
.
n
Liquid
k(iteration)
1
.
.
.
.
.
.
n
Table 2
Reactor
0
1
2
3
4
5
6
Table 3
Reactor
0
1
2
3
4
5
6
Gas
Liquid
Gas
Liquid
1
4
ENT 258 Numerical Analysis
6.0
DISCUSSION
7.0
CONCLUSION
Laboratory Module
1
5