Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
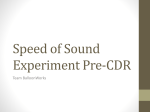
[Fall 2010] Team Mate Erick Chewakin, Emma Mossinger, Will Hakes, Amelia Weller, Jason Schelz, Brendon Charles, Ethan Long [PTERODACTYL BALLOONSAT] Proposal for a design to fulfill the requirements for BalloonSat Missions to the Edge or Space set forth by The Colorado Space Grant Consortium, The University of Colorado at Boulder Department of Aerospace Engineering Sciences, and the Edge of Space Sciences. Pterodactyl BalloonSat Mission Statement: The Mission of Star Fleet is to design and construct a balloon satellite capable of collecting data on ultraviolet radiation as the payload passes through distinct atmospheric levels and ascends to near-space, as well as remaining intact until recovery by the team. Additionally, Star Fleet shall fly a camera on the payload, visually documenting the journey into near-space. Mission Overview: The Sun has recently increased its activity level in the form of multiple sun-spots and solar flares, expected to continue and increase in frequency into the year two-thousand thirteen. As this activity began only recently, no BalloonSats have yet recorded data on this phenomenon. The sun releases elevated levels of magnetism and radiation during times of increased activity, erupting solar storms into space. Sun spots and other phenomena send charged particles into space in the form of a solar wind, and some of these charged particles that stream through space invariably encounter Earth and Earth’s atmosphere. These charged particles collide with particles in Earth’s atmosphere and scatter before reaching the crust and therefore the Earth’s inhabitants. Thus, although we may not notice a difference on the Earth’s surface, it has been predicted that these storms may cause massive problems in telecommunications and widespread satellite malfunctions, and one hypothesis on the recent solar activity stated that the Aurora could possibly become visible at lower latitudes. As a result, it is the hypothesis of this team that the Earth’s atmosphere experiences increased amounts of ultraviolet radiation due directly to the solar flares and other solar activities. To check our hypothesis, we shall compare our results to standard atmospheric ultraviolet radiation levels as well as to previous student payloads measuring these selfsame values. More specifically, the wavelengths of ultraviolet light measured shall cover those normally classified under “UVA” rays in order to get a more cogent sampling. This experiment will show what percent change in ultraviolet radiation has been caused due to the spike in solar activity, if any, as well as ascertain which specific levels of the atmosphere are affected. This information could be used to predict how the Sun’s activity could affect the Earth and those on the Earth over the next several years of augmented solar activity. For instance, the radiation could interfere with artificial satellites’ ability to send and receive data if the radiation intensity surpasses levels for normal operation. This may affect GPS, cellular telephones, and research efforts on the ground as well as on orbiting labs and satellites. It may even branch out to affect communication on the ground. Additionally, if the levels breach standard levels low enough in the atmosphere, it would begin to affect the safety of pilots and those travelling by airplane by exposing the aforementioned persons to superfluous amounts of ultraviolet rays without sufficient warning of the elevated risk. Those on the ground may even be advised to practice safer ultraviolet protection methods depending on the radiation levels. Team Mate Page 1 Pterodactyl BalloonSat Technical Overview: In order to effectively measure the levels of UVA radiation present through the different layers of the atmosphere, the satellite shall contain several different devices for the purpose of recording and storing data. They shall be separately integrated into the payload, such as the heater, HOBO, camera, and Arduino, so that the failure of one system will not adversely affect the others and at least some data will be ensured. One of these sensors shall be the HOBO, which will operate independently and record its own atmospheric data in case the Arduino with the primary sensor fails. The second and primary shall be the TSL235R SFE Light to Frequency Converter to measure the ultraviolet rays more specifically. This shall interface to an Arduino Duemilanove board in order to command the instruments to take readings at a defined interval and store the data points in a coherent and linear chronological fashion. Since the TSL235R has a digital output, no connections other than the direct link to the Duemilanove shall be necessary, thus reducing the weight, cost, and extra IC chips/logic necessary for other sensors. Upon recovery, the recorded data shall be compared to data taken at a time before the spike in solar activity either from a previous BalloonSat mission or archived research from a trusted alternate source such as government weather satellite readings. Additionally, a Canon A570IS Digital Camera shall be flown on the payload with modified firmware commanding the camera to independently take photographs of the flight at a predefined interval. These photographs will reside on the camera’s internal memory until recovery by the team. The payload shall interface to the flight line by passing the line through a tube running through the center of the payload in order to minimize torque and torsion and better maintain structural integrity during flight. The tube’s location will be removed from the sensors to the limited extent possible to avoid disturbance of the sensors during flight by the motion of the flight line. Hardware: In order to turn this design into a functional BalloonSat, the materials necessary must be obtained. This will include the SFE Light to Frequency Converter in order to measure the intensity of UVA radiation. Once this has been obtained, it shall be interfaced with the micro controller in order to make sure that it is both compatible with the satellite and accurately collecting data..We will also us the Canon A570IS Digital Camera to take pictures of the flight. This will be pointed out of a window of sufficient dimensions on the side of the near-spacecraft in order to get the best view of the flight. Additionally, the light to frequency converter shall be oriented out of a port of appropriate dimensions on the side of the payload in order to collect the most accurate data on radiation levels. The structure will be made out of foam core and insulated with foam in order to make sure all systems stay functional during flight. There will also be a heater placed on the side opposite of our power supply in order to better disperse heat throughout the payload. The Arduino (Duemilanove) Main Board micro-controller shall be ordered from SparkFun. http://www.sparkfun.com/commerce/product_info.php?products_id=666 The SFE Light to Frequency Converter TSL235R shall be purchased from Robot Shop http://www.robotshop.com/sfe-light-to-frequency-converter-tsl235r-2.html Team Mate Page 2 Pterodactyl BalloonSat The 9V batteries will be purchased from the hardware store that has the best quality batteries for the best price. Team Mate Page 3 Pterodactyl BalloonSat Switch Power Switch 2x9v Batteries Arduino Duemilanove Heater Camera Power Light to Frequency Converter 2xAA Batteries HOBO Team Mate Page 4 Pterodactyl BalloonSat Testing: The first series of tests scheduled for the payload are on the foam core structure. To simulate the possible stresses experienced during flight and landing, the empty payload shall be loaded with dead weight of reasonable similarity to the load of the sensors and dropped from a height of two stories. Also, the “whip test” will simulate the loads experienced by hanging from the flight line by attaching the structure to a line running through the center tube just as during flight; the payload will then be swung in violently. Additionally, a series of tumbles down a stairway will simulate the impacts of landing and further test the integrity of the payload. These tests will reveal the strength and durability of the structure, and most importantly if it can survive free fall, dropping and dragging, and winds such as after the balloon burst all experienced during flight. Another factor for testing is the capability of Velcro to adhere against foam core to secure the payload’s sensors in a cooler with dry ice, simulating the cold of altitude. Then, the mechanics and sensors inside the Balloon Satellite shall be tested using less destructive methods in order to avoid unnecessary wasting of equipment. For the HOBO, the temperature gauges shall be checked by getting them warm by radiation and conduction; also, a team member shall breathe on the humidity tracker to ascertain how accurately the data comes up on the computer. Next, the UV photodiodes shall be exposed to a UV black-light to see if it successfully transmits the information to the Ardunino board; this will ensure that it will be able to effectively collect data on the UV radiation levels in order to compare between years with solar flares and years without solar flares, our primary mission. The heater shall be inspected for functionality by running it in standard conditions, in the dry ice cooler, and for extended periods of time. Then, the camera shall take pictures through the window to ensure that the pictures are of acceptable quality. Once each of these parts has been tested and cleared, they will be assembled to see that they function as expected and test that the voltages are correct for the Ardunino board using a volt meter. The last step will be to test the whole system in a cooler full of dry ice to see if the heater keeps the system at -10 degrees Celsius or above and the components continue to function. Safety: For team safety, the use normal safety precautions shall be implemented; when needed, safety glasses and gloves shall be used. When soldering, grounding bracelets shall prevent electrocution. When performing structure tests, team members shall be sufficiently removed before performing tests. On launch day, all but one team member holding the payload shall move away so that there will be a smooth launch and no chance for injury. To ensure the projects’ safety, no sharp edges near the balloon cord shall be permitted. American flags shall be visible on the side of the BalloonSat to avoid confusion for anyone not involved in the project. To ensure that the satellites fall softly back to earth, without endangering any persons or damaging property, a recovery parachute provided by EOSS shall be attached just below the balloon. Special Features: AFE Light to Frequency Converter This sensor is the main component of the payload’s science. It will be measuring the amount of UVA radiation emitted from the sun during this solar flare, thus allowing the data to be compared to the normal levels of UVA radiation. The sensor shall be located on the side of the BalloonSat to ensure that the sensor has the best access to any present radiation. Team Mate Page 5 Pterodactyl BalloonSat Micro-Controller The micro-controller is an Arduino (Duemilanove) Main Board. Its operating voltage is 5V and it can be connected to our 9V batteries. The micro-controller has 32KB of Flash memory for datalogging during flight. The Arduino Main Board interfaces directly with the AFE Light to Frequency Converter and therefore requires no analogue conversion or amplification and will take the data from the light to frequency converter and store it. Data Storage, Retrieval, and Analysis: Data collected using the BalloonSat will be recorded on one of three devices located within the payload: Arduino board, HOBO, or the memory card of the camera. This data will be retrieved post-mission when the BalloonSat is collected. There is no live feed for the data, for it would require much time and effort to retrieve the data mid-flight, requiring equipment beyond the means of this team. The three data storage devices BalloonSat employs are as follows: 2 Gb SD card HOBO Datalogger Arduino Duemilanove Flash memory It employs three systems because two (the SD card and HOBO) come as part of the sensors BalloonSat utilizes (CAMERA and HOBO, respectively). The Arduino Duemilanove is to record the various electrical signals produced by the light to frequency converter which translate directly into datapoints regarding the intensity of UVA light. For ease of storage, it converts the analog signals into digital internally in the sensor. After landing, this data will be extracted to computers for analysis. Analysis consists of interpreting the light to frequency converter’s electrical impulses to yield the amount of UVA radiation at a given time. Then, using GPS data provided by EOSS, a graph showing the intensity of ultraviolet radiation at any given altitude shall be prepared. This will then be compared with data collected from previous years. A copy of the information collected in the form of photographs from the camera and the HOBO data will be compiled and matched with other data based on chronological origin in order to augment the data collected from the light to frequency converter and to create a more comprehensive view of the flight. General Mission Requirements: 1) Design shall collect data on UV radiation by using photodiodes and analyzing the data collected when we have the satellite and information back. 2) Design shall secure components in a way such as it can be used again by simply reclosing it and re-setting the switches. 3) Design shall use PVC tube in the center of the BalloonSat in order to put the string inside, and shall connect to the BalloonSat using a washer, hot glue, and a paper clip so that it does not pull through. 4) Design shall control it’s temperature using foam insulation and a heater. 5) Design weight BalloonSat shall be 498.4 g (depending on variable materials such as tape and hot glue, etc.) 6) Team shall acquire information on the ascent and descent rates of the flight string by using the information collected by the GPS. 7) HOBO shall fit inside payload. Team Mate Page 6 Pterodactyl BalloonSat 8) Design shall include external temperature cable. 9) Design shall include Canon A570IS Camera inside payload. 10) Design shall include heater system and 9 volts batteries. 11) Design shall use foam core as the primary component of the structure. 12) Itemized budget includes spare parts. 13) Design shall include contact information and a US flag attached to the outside of the structure. 14) All documentations shall be in standard metric measures. 15) All shall pursue any and all opportunities to get a ride to the launch on November 6, 2010. All members wish to participate in the recovery; if no transportation is available, Amelia Weller shall recover the payload as group leader. 16) Safety precautions shall be in place to protect ourselves and others. 17) All Gateway to Space property shall be returned at the end of the semester in working condition. 18) This team shall keep all records of budget and receipts, submitting all paperwork regarding purchases to Chris following the guidelines set forth by HW 04. 19) This team shall submit all receipts to Chris. 20) This team shall continue to have fun along with using its best creative powers in all endeavors. 21) Design shall include no living organism. 22) This team shall complete a final report and create a team video. Schedule: Date 9/7 9/9 9/10 9/14 9/15 9/16 9/21 9/28 9/28 10/5 10/5 10/12 10/19 10/26 10/26 10/28 11/2 11/2 11/5 11/5 11/6 Team Mate Time 6:45 PM 7:30 PM 2:20 PM 7:30 PM 6:30 PM 7:00 AM At apt 7:00 PM 9:30 AM 7:00 AM 7:00 PM 7:00 PM 7:00 PM 9:30 AM 7:00 PM 9:30 AM 7:00 AM 7:00 PM At apt 2:00 PM 4:45 AM What First Meeting Begin Proposal Assign Specializations Team Meeting (design complete) Team Meeting (proposals complete) Proposals AND Presentations Due Order Hardware Team Meeting (begin construction) Heater Due DD Rev A/B and CDR Presentation Due Team Meeting Team Meeting (prototyping design complete) Team Meeting (cold test complete) Pre-Launch Inspection Team Meeting Mission Test LLR Presentations and DD Rev C Due Team Meeting (design review) Balloon Weigh-in and Turn In DLC 270A & LRR Cards Due LAUNCH DAY! Page 7 Pterodactyl BalloonSat 11/16 7:00 PM Team Meeting (work on presentation) 11/23 7:00 PM Team Meeting (work on presentation) 11/30 7:00 AM All Presentations and Data Due 12/4 9:00 AM DD Rev D and Team Videos Due As noted on the calendar, team has weekly meetings. Additional team meetings shall be arranged on a need basis. Team Members: Team Member Amelia Weller Address Cockerell 109 Phone # (775)220-4294 Brendon Barela Emma Mossinger Ethan Long (303)518-7810 (925)348-0954 Erick Chewakin Jason Schelz Will Hakes (719)433-1480 (203)912-3059 (970)749-9158 (303)587-0220 Specialty Team Leader and Budget/Schedule Testing Lead Structures/Thermal Lead Electrical Lead C&DH Science Lead Assistant Position Testing C&DH and Science Structures/Thermal Electrical Structure Structure/Thermal Electrical Breif Team Summary: C. William Hakes is an Open Option Engineering Major from Durango, Colorado. He still plays with LEGOs. All of the time. Brendon Barela is an aerospace engineer major from Littleton, Colorado born 9/18/1991. He enjoys watching the Oakland Raiders win on Sundays and is therefore rarely happy. Ethan Long is an aerospace engineer major from Highlands Ranch, Colorado . He was born on 03/23/1992. He likes to play ultimate Frisbee, go on bike rides, and go on hikes. He also likes to watch the TV show Futurama. Jason Schelz is an aerospace engineering sciences major from Riverside, CT. He was born in Port Chester, NY on 08/28/92. His favorite movie is The Dark Knight. He loves to go skiing in the winter and go on hikes in the warm weather. Emma Mossinger was born in Concord, California on October 5, 1991. She loves the color purple, running and flying trapeze. When she is older she hopes to send her work to space and be an aerospace engineer. Amelia Weller was born in Reno, Nevada on September 28, 1992. She enjoys skiing and listening to music. Her favourite kind of music would have to either be indie or metal. She has also never eaten a pop-tart. Erick Chewakin was born on November 13, 199 in Colorado Springs, Colorado, where he was raised, He enjoys playing numerous sports and instruments in his spare time. After graduating Valedictorian from Thomas B. Doherty High School, he is now an Aerospace Engineering major at the University of Colorado at Boulder. Budget: In order to prevent over spending, Amelia has been appointed as the head of budget. She shall be responsible for keeping a very detailed itemized record of any money the group spends and shall sign off on product purchases. This team shall make provisions for obtaining all purchases Team Mate Page 8 Pterodactyl BalloonSat for which it is possible using the Gateway order form and will make appointments with Professor Koehler during purchasing times to ensure all purchases are properly reimbursed and money is taken from the correct team fund. In addition, any purchases made by any team member shall be submitted within a week in order to receive reimbursement. Component HOBO Data Logger Foam core Canon A570IS Digital Camera w/ Memory Card 9V Batteries Heater Arduino USB Board (Duemilanove) Aluminum Tape SFE Light to Frequency Converter- TSL235R PVC Tubing Washer and Paperclip Foam Insulation Hot Glue Velcro Switches Black light Price (including shipping) Provided Provided Provided Weight Place of Purchase 25.0g * 220.0g n/a n/a n/a $25 Provided $36.85 + tax 101.4g 100g 32.0g Hardware Store n/a SparkFun Provided $2.95 (X5) n/a n/a n/a Robotshop Provided Free Provided Provided $5 Provided Free access n/a n/a n/a n/a n/a 20.0g Not flying n/a We have these n/a n/a Hardware Store n/a n/a TOTALS: PRICE: Weight: $81.60 *498.4 (*Variable dependent on materials used i.e. foam core, tape, Velcro, glue, etc.) Team Mate Page 9