Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
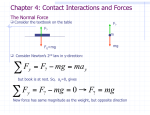
2.3 Newton’s Method Newton’s (or the Newton-Raphson) method is one of the most powerful and well-known numerical methods for solving a root-finding problem. Suppose that f C 2 [a, b] . Let x [a, b] be an approximation to p such that f x 0 and p x is “small”. Consider the first Taylor polynomial for f x expanded about x , f x f x (x x ) f x ( x x )2 f , 2 where x, x . Since f p 0 , this equation with x p gives 0 f x ( p x) f x ( p x )2 f . 2 Newton’s method is derived by assuming that since involving p x 2 p x is small, the term is much smaller, so 0 f x ( p x) f x . Solving for p gives px f x . f x This sets the stage for Newton’s method, which starts with an initial approximation p0 and generates the sequence pn n 0 , by pn pn 1 f pn 1 , f pn 1 for n 1. Figure 2.7 illustrates how the approximations are obtained using successive tangents. Starting with the initial approximation p0 , the approximation x intercept of the tangent line to the graph of f at p1 is the p , f p . 0 0 The approximation p2 is the x intercept of the tangent line to the graph of f at p , f p 1 1 and so on. Algorithm 2.3 follows this procedure. Algorithm 2.3: To find a solution to f x 0 given an initial approximation p0 : 1 Input: initial approximation p0 ; tolerance TOL; maximum number of iteration N. Output: approximate solution p or message of failure. Step 1 Set i 1 Step 2 While i N do Steps 3-6 Step 3 Set p p0 Step 4 f p0 f p0 (*Compute pi *) If p p0 TOL then Output(p) Stop Step 5 Set p0 p Step 6 Set i i 1 Step 7 Output (The method failed after N iterations) (* The procedure was unsuccessful *) Stop. The stopping-technique inequalities given with the Bisection method are applicable to Newton’s method. That is, select a tolerance TOL 0 , and construct p1 , p2 , , pi until pi pi 1 TOL , pi pi 1 pi TOL, pi 0 , or f pi TOL . A form of these inequalities can be used in Step 4 of Algorithm 2.3. This produces the method (Algorithm 2.3) described in the following Subroutine: SUBROUTINE NEWTONS(N,P0,TOL,P) C=========================================================== C ALGORITHM 2.3 Newton's Iteration C PURPOSE C To find a solution to P=f(p) given an initial approximation p0 C INPUT C initial approximation: P0 C tolerance: TOL C maximum number of iterations N C OUTPUT C approximation solution P or message of that the method fails C------------------------------------------------------------------C INTEGER N REAL P0,TOL,P EXTERNAL F,FP 2 INTRINSIC ABS C *** Print approximation value P using Newtons Iteration *** 9 I=0 WRITE(10,9) I,P0 DO 10 I = 1,N F0 = F(P0) FP0 = FP(P0) D = F0/FP0 P = P0-D WRITE(10,9) I,P FORMAT(1X,I5,F12.6) IF (ABS(P-P0).LT.TOL) THEN C *** The procedure was successful *** RETURN END IF P0 = P 10 CONTINUE WRITE(*,*) 'Method failed after N iterations' RETURN END Newton’s method is a functional iteration technique of the form pn g pn1 , for which g pn 1 pn 1 f pn 1 , for n 1 . f pn 1 In fact, this is the functional iteration technique that was used to give the rapid convergence was saw in part (e) of Example 3 in Section 2.2. It is clear from the above equation that Newton’s method cannot be continued if f pn1 0 for some n . In fact, we will see that the method is most effective when f is bounded away from zero near p . Example 1: Suppose we would like to approximate a fixed point of g x cos x . The graph in Figure 2.8 implies that a single fixed-point p lies on 0, . 2 C****************************************************************** C Example 1 (pp68): Using Newton Iteration to find a C solution accurate to within 1.0E-6 C for gives functions f(X) = cosx-x 3 C****************************************************************** C REAL P0,TOL,P INTEGER N OPEN(UNIT=10,FILE='c0.doc',STATUS='UNKNOWN') PI = 3.1415926 P0 = PI/4.0 TOL = 1.0E-6 N = 50 CALL NEWTONS(N,P0,TOL,P) WRITE(10,9) P 9 FORMAT(1X,'Approximation solution P:',F12.6) STOP END C REAL FUNCTION F(X) C============================================================ C PURPOSE C Find the value of function F(X)=cosx-x C---------------------------------------------------------------------------------------------------C REAL X INTRINSIC COS F = COS(X)-X RETURN END C REAL FUNCTION FP(X) C============================================================ C PURPOSE C Find the value of function df(X)/dx=-sinx-1 C----------------------------------------------------------------------------------------------------C REAL X INTRINSIC SIN FP = -SIN(X)-1 RETURN END Table 2.3 shows the results (accurate to within 106 ) of fixed-point iteration with p0 4 . The best we could conclude from these results is that p 0.74 . 4 Table 2.3 ----------------- n Table 2.4 ------------------- n pn ----------------0 0.785398 1 0.707107 2 0.760245 3 0.724667 4 0.748720 5 0.732561 6 0.743464 7 0.736128 pn -------------------0 0.785398 1 0.739536 2 0.739085 3 0.739085 To approach this problem differently, define f x cos x x and apply Newton’s method. Since f x sin x 1 , the sequence is generated by pn pn 1 With p0 cos pn 1 pn 1 sin pn 1 1 , for n 1. , the approximations in Table 2.4 are generated. (It notes that if a 4 number is real (in Fortran-77), it has only six effective numerical digit). An excellent approximation (accurate to within 106 ) is obtained with n 2 . We would expect this result to be accurate to the places listed because of the agreement of p2 and p3 . The Taylor series derivation of Newton’s method at the beginning of the section points out the importance of an accurate initial approximation. The crucial assumption is that the term involving p x 2 is, by comparison with p x , so small that it can be deleted. This will clearly be false unless x is a good approximation to p . If p0 is not sufficiently close to the actual root, there is little reason to suspect that Newton’s method will converge to the root. However, in some instances, even poor initial approximations will produce convergence. The following convergence theorem for Newton’s method gives the theoretical importance of the choice of p0 。 5 f C 2 a, b . If Theorem 2.5: Let p a, b is such that f p 0 and f p 0 , then there exists a 0 such that Newton’s method generates a sequence pn n1 converging to p for any initial approximation . Proof. The proof is based on analyzing Newton’s method as the functional iteration scheme pn g pn1 , for n 1, with g x x Let k be in f x . f x 0,1 . We first find an interval p , p and for which g x k , for all that g maps into itself x p , p . Since f is continuous and f p 0 , there exists a 1 0 , such that f x 0 for x p 1 , p 1 a, b . Thus, is g defined and continuous on p 1, p 1 . Also, g x 1 f x f x f x f x f x 2 f x f x f x 2 , for x p 1 , p 1 , and, since f C 2 a, b , we have g C1 p 1 , p 1 . By assumption, f p 0 , so g p f p f p f p 2 0. Since g is continuous and , there exits a , with 0 1 , and g x k , It remains to show that for all x p , p . g maps p , p into p , p . If x p , p , the Mean Value Theorem implies that for some number between x and p , g x g p g x p . So g x p g x g p g x p k x p x p . Since x p , p , it follows that x p and g x p . Hence, g 6 maps p , p p , p . into All the hypotheses of the Fixed-Point Theorem are now satisfied, so the sequence pn n1 , defined by pn g pn 1 pn 1 f pn 1 , f pn 1 for n 1, converges to p for any p0 p , p . Theorem 2.5 states that, under reasonable assumptions, Newton’s method converges provided a sufficiently accurate initial approximation is chosen. It also implies that the constant k that bounds the derivative of g , and, consequently, indicates the speed of convergence of the method, decreases to 0 as the procedure continues. This result is important for the theory of Newton’s method, but it is seldom applied in practice since it does not tell us how to determine . In a practical application, an initial approximation is selected, and successive approximations are generated by Newton’s method. These will generally either converge quickly to the root, or it will be clear that convergence is unlikely. Newton’s method is an extremely powerful technique, but it has a major weakness: the need to know the value of the derivative of f at each approximation. Frequently, f x is far more difficult and needs more arithmetic operations to calculate than f x . To circumvent the problem of the derivative evaluation in Newton’s method, we introduce a slight variation. By definition, f pn 1 l i m f x f pn 1 x pn1 x pn 1 . Letting x pn 2 , we have f pn 1 f pn 2 f pn 1 pn 2 pn 1 f pn 1 f pn 2 pn 1 pn 2 . Using this approximation for f pn1 in Newton’s formula gives pn pn 1 f pn 1 pn 1 pn 2 f pn 1 f pn 2 . This technique is called the Secant method and is presented in Algorithm 2.4. (See Figure 2.9) Starting with the two initial approximations 7 p0 and p1 , the p2 is the x intercept of the line joining approximation p , f p . 1 The approximation 1 p , f p 1 1 and p , f p 0 0 and p3 is the x intercept of the line joining p , f p , and so on. 2 2 Algorithm 2.4 : Secant method To find a solution to f x 0 given initial approximations p0 and p1 ; Input: initial approximations p0 , p1 ; tolerance TOL;maximum number of iteration N. Output: approximate solution p or message of failure. Step 1 i2 q0 f p0 q1 f p1 Step 2 While i N do Steps 3-6 Step 3 p p1 q1 p1 p0 q1 q0 (*Compute pi *) Step 4 If p p1 TOL then Output p (*The procedure was successful*) Stop End if Step 5 p0 p1 q0 q1 p1 p q1 f p Step 6 i i 1 Step 7 Output (The method failed after N iterations) (* The procedure was unsuccessful *) Stop. SUBROUTINE SECANT(N,P0,P1,TOL,P) C================================================ C ALGORITHM 2.4 Secant Method C PURPOSE 8 C To find a solution to f(x)=0 given initial approximation p0,p1 C INPUT C initial approximations: P0,P1 C tolerance: TOL C maximum number of iterations N C OUTPUT C approximation solution P or message of that the method fails C--------------------------------------------------------------------------------C INTEGER N REAL P0,P1,TOL,P,Q0,Q1 EXTERNAL F INTRINSIC ABS C DO 10 I = 2,N Q0=F(P0) Q1=F(P1) C*** COMPUTE P(I) *** P=P1-Q1*(P1-P0)/(Q1-Q0) WRITE(10,5) I,P 5 FORMAT(1X,I3,2X,F15.7) IF( ABS(P-P1).LT.TOL ) THEN RETURN END IF C*** UPDATE P0, Q0, P1, Q1 P0=P1 Q0=Q1 P1=P Q1=F(P) 10 CONTINUE C PROCEDURE COMPLETED UNSUCCESSFULLY RETURN END The next example involves a problem considered in Example 1, where we used Newton’s method with p0 4 . Example 2. Use the Secant method to find a solution to x cos x accurate to within 1.0E-6. Let two initial approximations p0 0.5, p1 4 . 9 Using Secant Method and the formula: pn pn 1 f pn 1 pn 1 pn 2 f pn 1 f pn 2 pn 1 (cos pn 1 pn 1 ) pn 1 pn 2 (cos pn 1 pn 1 ) (cos pn 2 pn 2 ) The procedure is detailed in following program C******************************************************************* C Example 1 (pp68): Using Secant Method to find a C solution to x=cosx ,accurate to within 1.0E-6 C with p0=0.5, p1=3.1415926/4 C******************************************************************* C INTEGER N OPEN(UNIT=10,FILE='c0.doc',STATUS='UNKNOWN') 9 PI = 3.1415926 P0 = 0.5 P1= PI/4.0 TOL = 1.0E-6 N = 50 CALL SECANT(N,P0,P1,TOL,P) WRITE(10,9) P FORMAT(1X,'Approximation solution P:',F15.7) STOP END C REAL FUNCTION F(X) C============================================= C PURPOSE C Find the value of function F(X)=cosx-x C-------------------------------------------------------------------------C REAL X INTRINSIC COS F = COS(X)-X RETURN END C Table 2.5 shows the results of the Secant Method applied to x cos x . 10 Table 2.5 --------------------------------------------n Pn --------------------------------------------0 0.5000000 1 0.7853981 2 0.7363842 3 0.7390581 4 0.7390851 5 0.7390851 --------------------------------------------Approximation solution p: 0.7390851 From Table 2.5, it can be seen that the Secant method is convergence and the approximation solution p is 0.7390851, which is accurate to the seventh decimal place. By comparing the results here with those in Example 1, we see that p5 is accurate to the seventh decimal place. The convergence of the Secant method is much faster than functional iteration but slightly slower than Newton’s method, which obtained this degree of accuracy with p2 . Newton’s method or the Secant method is often used to refine an answer obtained by another technique, such as the Bisection method, since these methods require a good first approximation, but generally give rapid convergence Homework 3: Exercise set 2.3 Q5. Use Newton’s method to find solutions accurate to within 106 for the for the following problems: (b) x 3x 1 0, [-3,-2] ; 3 2 (d) x 0.8 0.2sin x 0, [0, 2] . Q13. The fourth-degree polynomial f x 230x4 18x3 9 x2 221x 9 has two real zeros, one in [-1,0] and the other in [0,1]. Attempt to approximate these zeros to within 106 using the 11 (b) Secant method (c) Newton’s method Use the endpoints of each interval as the initial approximations in (b) and the midpoints as the initial approximation in (c). 12