The Intelligent Conversational Humanoid Robot
... However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-world problems. One of these problems, similar to the problem of the Turing Test, is how to make an artificial device or creature appear more human. To address this problem, a technology h ...
... However, when it comes to engineering, the purpose of artificial intelligence is to use knowledge to solve real-world problems. One of these problems, similar to the problem of the Turing Test, is how to make an artificial device or creature appear more human. To address this problem, a technology h ...
The 1995 Robot Competition and Exhibition - David P. Miller
... tasks as goal-directed navigation, feature detection, object recognition, identification, and physical manipulation as well as effective humanrobot communication. The competition consisted of two separate events: (1) Office Delivery and (2) Office Cleanup. The exhibition also consisted of two events ...
... tasks as goal-directed navigation, feature detection, object recognition, identification, and physical manipulation as well as effective humanrobot communication. The competition consisted of two separate events: (1) Office Delivery and (2) Office Cleanup. The exhibition also consisted of two events ...
The AAAI 2006 Mobile Robot Competition and
... required conference attendees to interact with a robot and to fill out an evaluation form. The tasks were not tied to the seven categories. Rather, it was up to the individual teams to decide what task their robot should perform. Teams were also responsible for recruiting evaluators from the audienc ...
... required conference attendees to interact with a robot and to fill out an evaluation form. The tasks were not tied to the seven categories. Rather, it was up to the individual teams to decide what task their robot should perform. Teams were also responsible for recruiting evaluators from the audienc ...

PDF
... tasks. Indeed forces play an important role in many skills that service robots should have, such as opening doors, pulling drawers, assembling things, and cutting slices of some foods, to name a few. We have proposed a learning framework7, where teacher demonstrations are encoded in a Hidden Markov ...
... tasks. Indeed forces play an important role in many skills that service robots should have, such as opening doors, pulling drawers, assembling things, and cutting slices of some foods, to name a few. We have proposed a learning framework7, where teacher demonstrations are encoded in a Hidden Markov ...
The 2004 Mobile Robot Competition and Exhibition
... we have seen more robot entries create maps of the environment. This trend can be attributed to rules changes that encourage machine-created maps. It might also be attributed to the fact that maps can help to provide an awareness of where the robot is in the environment. Improving interfaces. Intera ...
... we have seen more robot entries create maps of the environment. This trend can be attributed to rules changes that encourage machine-created maps. It might also be attributed to the fact that maps can help to provide an awareness of where the robot is in the environment. Improving interfaces. Intera ...

Neural Robot Detection in RoboCup
... First results are provided for the neural network which is responsible for the orientation histogram values. In Table 1 the average results over all possible parameters for the different data sets (the training and the evaluation set) are listed. Because the neural network emits a probability value ...
... First results are provided for the neural network which is responsible for the orientation histogram values. In Table 1 the average results over all possible parameters for the different data sets (the training and the evaluation set) are listed. Because the neural network emits a probability value ...

Machine Ethics, the Frame Problem, and Theory of Mind
... a rough taxonomy of various objections to the notion of a thinking machine. Perhaps the most general objection was the argument from disability, which expresses the belief that machines will never “...be kind, resourceful, beautiful, friendly, have initiative, have a sense of humour, tell right from ...
... a rough taxonomy of various objections to the notion of a thinking machine. Perhaps the most general objection was the argument from disability, which expresses the belief that machines will never “...be kind, resourceful, beautiful, friendly, have initiative, have a sense of humour, tell right from ...
robotics - Suraj @ LUMS
... health, our standard of living, our knowledge and the world in which we live. As the technology progresses, we are finding new ways to use robots. ...
... health, our standard of living, our knowledge and the world in which we live. As the technology progresses, we are finding new ways to use robots. ...
Reasoning robot, involved tasks/modules and robot world
... drawing it by using exact lengths of corridors and distances to walls. It can describe location of robot and objects in its world as a configuration space. For mobile robots, usually collapse 6 DOF to 2 DOF by assuming planar world and that the robot can rotate on a spot (so robot direction not impo ...
... drawing it by using exact lengths of corridors and distances to walls. It can describe location of robot and objects in its world as a configuration space. For mobile robots, usually collapse 6 DOF to 2 DOF by assuming planar world and that the robot can rotate on a spot (so robot direction not impo ...

A framework for making sophisticated robotics accessible
... There are several problems with the use of low-cost robots in education. The first problem is that every robot platform comes with its own, often proprietary, development tools that are substantially different from other platforms. Often the primary programming languages used are different as well. ...
... There are several problems with the use of low-cost robots in education. The first problem is that every robot platform comes with its own, often proprietary, development tools that are substantially different from other platforms. Often the primary programming languages used are different as well. ...

fitzpatrick2
... viewed in ways that are sensitive to past history. Figure 2 demonstrates the use of such generalizations to link an object with its name through an extended search activity. This is a simplified version of an experiment carried out on human infants by Tomasello (Tomasello, 1997), which in combinatio ...
... viewed in ways that are sensitive to past history. Figure 2 demonstrates the use of such generalizations to link an object with its name through an extended search activity. This is a simplified version of an experiment carried out on human infants by Tomasello (Tomasello, 1997), which in combinatio ...

Learning Concepts by Interaction
... of development (e.g., 10,11). I think one has to take a minimalist stance and avoid innate knowledge in one’s explanations of the acquisition of later knowledge. This reluctance comes, in part, from years of slogging in AI, where we must always provide a lot of knowledge for our systems to do relati ...
... of development (e.g., 10,11). I think one has to take a minimalist stance and avoid innate knowledge in one’s explanations of the acquisition of later knowledge. This reluctance comes, in part, from years of slogging in AI, where we must always provide a lot of knowledge for our systems to do relati ...
The 2000 AAAI Mobile Robot Competition and Exhibition
... Hors d’Oeuvres, Anyone? The objective of the Hors d’Oeuvres, Anyone? contest is to create service robots that can offer hors d’oeuvres to attendees at the reception. The event stresses human-robot interaction, as well as mobility, and each contestant is required to explicitly and unambiguously demon ...
... Hors d’Oeuvres, Anyone? The objective of the Hors d’Oeuvres, Anyone? contest is to create service robots that can offer hors d’oeuvres to attendees at the reception. The event stresses human-robot interaction, as well as mobility, and each contestant is required to explicitly and unambiguously demon ...

Controlling a mobile robot with Visual Prolog 7
... and computer (see Fig. 5) After being turned on, robot is moving around for some time to adjust his sensors. In the initial state robot moves randomly, until the computer tells him to look for the line. Having found the line, robot starts to follow it. If a bright flash of light frightens robot, he ...
... and computer (see Fig. 5) After being turned on, robot is moving around for some time to adjust his sensors. In the initial state robot moves randomly, until the computer tells him to look for the line. Having found the line, robot starts to follow it. If a bright flash of light frightens robot, he ...

Explaining robot actions - Advanced Technology Laboratories
... mode and world information. We have developed but not implemented algorithms that examine changes in the grids used to produce the cost map. These algorithms look for the most influential cells on the robot’s route and determine what grid(s) correspond to the values of these cells. By understanding ...
... mode and world information. We have developed but not implemented algorithms that examine changes in the grids used to produce the cost map. These algorithms look for the most influential cells on the robot’s route and determine what grid(s) correspond to the values of these cells. By understanding ...
Types of Robots - Web Services Overview
... TOYS • "LEGO MINDSTORMS" robot construction kit. These kits, which were developed by the LEGO company with M.I.T. scientists, let kids create and program ...
... TOYS • "LEGO MINDSTORMS" robot construction kit. These kits, which were developed by the LEGO company with M.I.T. scientists, let kids create and program ...
Bio-inspired
... due to some environmental problems. Phani with iRobot's chief technology officer, Professor Rodney Brooks The “Roomba discovery” is intelligent cleaner robot. Which is attached to a charger at its starting position, its task is to start from its charging position and clean the environment and return ...
... due to some environmental problems. Phani with iRobot's chief technology officer, Professor Rodney Brooks The “Roomba discovery” is intelligent cleaner robot. Which is attached to a charger at its starting position, its task is to start from its charging position and clean the environment and return ...
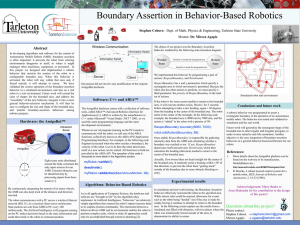
Poster title - Tarleton State University
... robot also has other actions to perform, we must specify a third parameter: the priority of RespectBoundary in the total set of actions. If the robot is for some reason unable to return to the bounded area, it will execute another action, Wander, for 5 seconds before attempting to take a new heading ...
... robot also has other actions to perform, we must specify a third parameter: the priority of RespectBoundary in the total set of actions. If the robot is for some reason unable to return to the bounded area, it will execute another action, Wander, for 5 seconds before attempting to take a new heading ...
Artificial Intelligence & Robotics
... exchange of information Rotating turret holds 4 sonars Turret also holds an infrared sensor to detect infrared rays 32 light sensors detect objects in front of the robot Bumpers all around the robot used to follow walls Radio modem to communicate with remote agents ...
... exchange of information Rotating turret holds 4 sonars Turret also holds an infrared sensor to detect infrared rays 32 light sensors detect objects in front of the robot Bumpers all around the robot used to follow walls Radio modem to communicate with remote agents ...
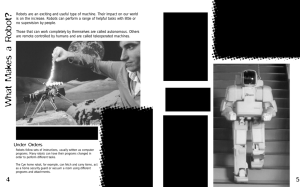
What is a robot?
... 2. Make a list of the abilities the robot has. 3.Draw a picture on a piece of paper and name its parts and explain what each part does. 4.Write a paragraph describing the robot and what it can do. 5. Introduce your design to your classmates. ...
... 2. Make a list of the abilities the robot has. 3.Draw a picture on a piece of paper and name its parts and explain what each part does. 4.Write a paragraph describing the robot and what it can do. 5. Introduce your design to your classmates. ...
Slide 1
... Water clocks are a big breakthrough for timepieces. Up until then the Greeks used hour glasses that had to be turned over after all the sand ran through. Ctesibus' invention changed this because it measured time as a result of the force of water falling through it at a constant rate. In general, the ...
... Water clocks are a big breakthrough for timepieces. Up until then the Greeks used hour glasses that had to be turned over after all the sand ran through. Ctesibus' invention changed this because it measured time as a result of the force of water falling through it at a constant rate. In general, the ...
robot
... To work on their own, robots need to know information about themselves and the world around them. Devices called sensors collect information, such as the robot’s position or the size of an obstacle ahead. Sensors pass this data back to a robot’s controller. This is the "brain" of the robot, which ma ...
... To work on their own, robots need to know information about themselves and the world around them. Devices called sensors collect information, such as the robot’s position or the size of an obstacle ahead. Sensors pass this data back to a robot’s controller. This is the "brain" of the robot, which ma ...