4.1_simple_harmonic_motion_-_worksheet_
... (a) Calculate the acceleration of the piston at maximum displacement (b) Calculate the velocity as the piston moves past its equilibrium point, (c) What is the net force exerted on the piston at maximum displacement? Answers: (a) a = 1 x 104 ms-2 (b) v = 21 ms-1, (c) F = 2.5 x 103 N ...
... (a) Calculate the acceleration of the piston at maximum displacement (b) Calculate the velocity as the piston moves past its equilibrium point, (c) What is the net force exerted on the piston at maximum displacement? Answers: (a) a = 1 x 104 ms-2 (b) v = 21 ms-1, (c) F = 2.5 x 103 N ...

4.1_simple_harmonic_motion_
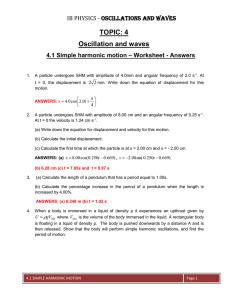
... 10. A particle of mass 0.50 kg undergoes SHM with angular frequency ω = 9.0 s-1 and amplitude 3.0 cm. For this particle, determine: (a) the maximum velocity (b) the velocity and acceleration when the particle has displacement 1.5 cm and moves towards the equilibrium position from its initial positio ...
... 10. A particle of mass 0.50 kg undergoes SHM with angular frequency ω = 9.0 s-1 and amplitude 3.0 cm. For this particle, determine: (a) the maximum velocity (b) the velocity and acceleration when the particle has displacement 1.5 cm and moves towards the equilibrium position from its initial positio ...





Date: Thursday, April 06, 2000
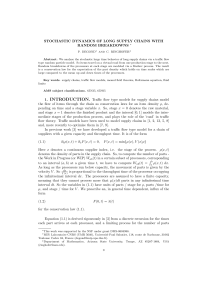
... Suppose we have a system where points which are not neighbors are independent: Pr(Fp == x | Fq == y) = Pr(Fp == x), where Pr(?|?) is the conditional probability, p and q, which are not neighbors and x and y. Such a system is called Markov Random Field. (An extremely good advice: don’t read this b ...
... Suppose we have a system where points which are not neighbors are independent: Pr(Fp == x | Fq == y) = Pr(Fp == x), where Pr(?|?) is the conditional probability, p and q, which are not neighbors and x and y. Such a system is called Markov Random Field. (An extremely good advice: don’t read this b ...


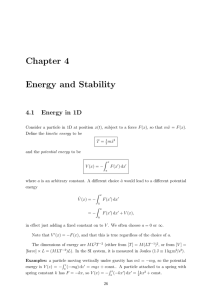
Chapter 4 Energy and Stability
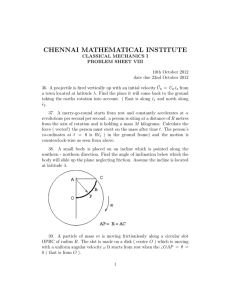
... arc-length measured along the wire from a fixed point. So long as we know the shape of the wire, the single variable s tells us everything we need to know about the bead’s position. Such a system is known as having one degree of freedom, and we can treat it as being effectively one-dimensional. For ...
... arc-length measured along the wire from a fixed point. So long as we know the shape of the wire, the single variable s tells us everything we need to know about the bead’s position. Such a system is known as having one degree of freedom, and we can treat it as being effectively one-dimensional. For ...
Post-doc position Convergence of adaptive Markov Chain Monte
... Description. Adaptive Monte Carlo methods i.e. self-calibrating stochastic simulation methods have proved to be efficient for small to medium scale problems. In developing adaptive methods, it became clear that a major challenge in Monte Carlo methods is to develop robust Monte Carlo sampling techni ...
... Description. Adaptive Monte Carlo methods i.e. self-calibrating stochastic simulation methods have proved to be efficient for small to medium scale problems. In developing adaptive methods, it became clear that a major challenge in Monte Carlo methods is to develop robust Monte Carlo sampling techni ...
Dynamic Inertia Weight Particle Swarm Optimization for Solving
... Dynamic Inertia Weight Particle Swarm Optimization DWIPSO and the influence of different parameters on algorithm optimization has been introduced in details. In this paper, DWI-PSO has been applied for solving Nonograms puzzle. A dynamic inertia weight introduced to increase the convergence speed an ...
... Dynamic Inertia Weight Particle Swarm Optimization DWIPSO and the influence of different parameters on algorithm optimization has been introduced in details. In this paper, DWI-PSO has been applied for solving Nonograms puzzle. A dynamic inertia weight introduced to increase the convergence speed an ...

QUANTUM PARTICLES PASSING THROUGH A MATTER
... the thermal interaction with the surround space at a finite temperature. The time-dependent internal energy and the entropy of the particle have been studied for the irreversible process started from a fully coherent quantum state to thermodynamic equilibrium with the surrounding space.13 Due to the ...
... the thermal interaction with the surround space at a finite temperature. The time-dependent internal energy and the entropy of the particle have been studied for the irreversible process started from a fully coherent quantum state to thermodynamic equilibrium with the surrounding space.13 Due to the ...
Unit Operation-II
... differentiate S & S with other techniques Application of S&S Theory of (S&S) be introduced to preliminary analysis of S&S ...
... differentiate S & S with other techniques Application of S&S Theory of (S&S) be introduced to preliminary analysis of S&S ...

Monte Carlo Methods
... Exercise 2. What is the mean, variance and standard deviation of a U(a, b) random variable? Non-uniform distributions are those whose probability density functions are not constant. Several simple but important non-uniform distributions are • Triangular distribution. It is characterized by three par ...
... Exercise 2. What is the mean, variance and standard deviation of a U(a, b) random variable? Non-uniform distributions are those whose probability density functions are not constant. Several simple but important non-uniform distributions are • Triangular distribution. It is characterized by three par ...


A tutorial on particle filters for online nonlinear/non-gaussian
... attempts to construct the posterior probability density function (pdf) of the state based on all available information, including the set of received measurements. Since this pdf embodies all available statistical information, it may be said to be the complete solution to the estimation problem. In ...
... attempts to construct the posterior probability density function (pdf) of the state based on all available information, including the set of received measurements. Since this pdf embodies all available statistical information, it may be said to be the complete solution to the estimation problem. In ...