Review 2: Many True/False
... 28. If fxx > 0 and fyy > 0 at a point (x, y) then the point (x, y) is a local minimum of the function f . FALSE: if fxy , fyx are large then it could be a saddle point. 29. If (x, y) is a local minimum of a function f then f is differentiable at (x, y) and ∇f (x, y) = 0. FALSE: say, f (x, y) = |x| + ...
... 28. If fxx > 0 and fyy > 0 at a point (x, y) then the point (x, y) is a local minimum of the function f . FALSE: if fxy , fyx are large then it could be a saddle point. 29. If (x, y) is a local minimum of a function f then f is differentiable at (x, y) and ∇f (x, y) = 0. FALSE: say, f (x, y) = |x| + ...



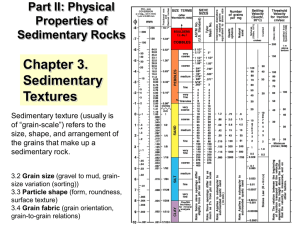
Grain size
... frequency curve plotted from data in A. C. Cumulative curve with an arithmetic ordinate scale. D. Cumulative curve with a probability ordinate scale. ...
... frequency curve plotted from data in A. C. Cumulative curve with an arithmetic ordinate scale. D. Cumulative curve with a probability ordinate scale. ...

history force and inertia effects applied to swirling flow
... In the oil industry, water is used to maintain the pressure in oil reservoirs during the extraction of oil. Therefore, an in time increasing quantity of water is produced. Separation of this oil-water mixture is required to recover the desired oil. Moreover, to be able to return produced water to th ...
... In the oil industry, water is used to maintain the pressure in oil reservoirs during the extraction of oil. Therefore, an in time increasing quantity of water is produced. Separation of this oil-water mixture is required to recover the desired oil. Moreover, to be able to return produced water to th ...
Question Bank
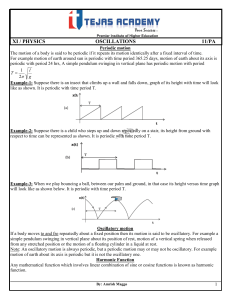
... motion takes place in a vertical plane under gravity. 21. A particle of mass m is connected by a massless spring of stiffness k and unstretched length r0 to a point that is moving along a circular path of radius a at a uniform angular rate of ω. Find the equations of motion assuming that the particl ...
... motion takes place in a vertical plane under gravity. 21. A particle of mass m is connected by a massless spring of stiffness k and unstretched length r0 to a point that is moving along a circular path of radius a at a uniform angular rate of ω. Find the equations of motion assuming that the particl ...

Multi-objective Optimization Using Particle Swarm Optimization
... • A swarm consists of N particles in a Ddimensional search space. Each particle holds a position (which is a candidate solution to the problem) and a velocity (which means the flying direction and step of the particle). • Each particle successively adjust its position toward the global optimum based ...
... • A swarm consists of N particles in a Ddimensional search space. Each particle holds a position (which is a candidate solution to the problem) and a velocity (which means the flying direction and step of the particle). • Each particle successively adjust its position toward the global optimum based ...
Monte Carlo Method www.AssignmentPoint.com Monte Carlo
... equations arising in fluid mechanics. We also quote an earlier pioneering article by Theodore E. Harris and Herman Kahn, published in 1951, using mean field genetic-type Monte Carlo methods for estimating particle transmission energies. Mean field genetic type Monte Carlo methodologies are also used ...
... equations arising in fluid mechanics. We also quote an earlier pioneering article by Theodore E. Harris and Herman Kahn, published in 1951, using mean field genetic-type Monte Carlo methods for estimating particle transmission energies. Mean field genetic type Monte Carlo methodologies are also used ...


On Electrodynamical Self-interaction
... [5]. Again, the finite results of such a theory are unstable with respect to small changes of this parameter. Another approach was proposed by Dirac (see [2]), who tried to eliminate the field from the composed “particles + field” system, and to calculate only the field’s global influence on the par ...
... [5]. Again, the finite results of such a theory are unstable with respect to small changes of this parameter. Another approach was proposed by Dirac (see [2]), who tried to eliminate the field from the composed “particles + field” system, and to calculate only the field’s global influence on the par ...




Solution
... colliding with the ground and moving with constant friction through the medium. The friction force is smaller than the weight. The potential energy of the particle can be represented in analogy to the gravitational potential energy of the ball, m g h , considering m g Fx ; h x . As is very ...
... colliding with the ground and moving with constant friction through the medium. The friction force is smaller than the weight. The potential energy of the particle can be represented in analogy to the gravitational potential energy of the ball, m g h , considering m g Fx ; h x . As is very ...
Gravity inversion of a fault by Particle swarm optimization (PSO
... Deepa 2008). On the other hand Simulated Annealing simulates the annealing process in which a substance is heated above its melting temperature and then gradually cools to produce the crystalline lattice, which minimizes its energy probability distribution Haupt & Haupt (De Vicente et al. 2003; Haup ...
... Deepa 2008). On the other hand Simulated Annealing simulates the annealing process in which a substance is heated above its melting temperature and then gradually cools to produce the crystalline lattice, which minimizes its energy probability distribution Haupt & Haupt (De Vicente et al. 2003; Haup ...